г
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КРЕПЛЕНИЯ ЗЕРКАЛА ТЕЛЕСКОПА | 2017 |
|
RU2687306C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВЗАИМНОЙ ОРИЕНТАЦИИ И ВЗАИМНОГО ПОЛОЖЕНИЯ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 2017 |
|
RU2662455C1 |
| Узел крепления оптического зеркала к опоре | 1980 |
|
SU964559A1 |
| Устройство для базирования и разгрузки крупногабаритных высокоточных зеркал при их формообразовании и контроле | 2017 |
|
RU2677036C2 |
| ДЕФОРМИРУЕМОЕ ЗЕРКАЛО | 1988 |
|
SU1841097A1 |
| УСТРОЙСТВО КАТАДИОПТРИЧЕСКОГО ТЕЛЕСКОПА | 2012 |
|
RU2475788C1 |
| ДВУХКООРДИНАТНЫЙ ПЬЕЗОКЕРАМИЧЕСКИЙ КОРРЕКТОР УГЛОВ НАКЛОНА ВОЛНОВОГО ФРОНТА | 2024 |
|
RU2837501C1 |
| СПОСОБ И УСТРОЙСТВО КРЕПЛЕНИЯ КРУПНОГАБАРИТНОГО ЗЕРКАЛА ОПТИКО-МЕХАНИЧЕСКОГО УСТРОЙСТВА В ОПРАВЕ (ВАРИАНТЫ) | 2017 |
|
RU2661049C1 |
| УСТРОЙСТВО ДЛЯ ЮСТИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2008 |
|
RU2394259C1 |
| Пьезоэлектрическое шаговое устройство для микроперемещения твердого тела | 1977 |
|
SU682973A1 |
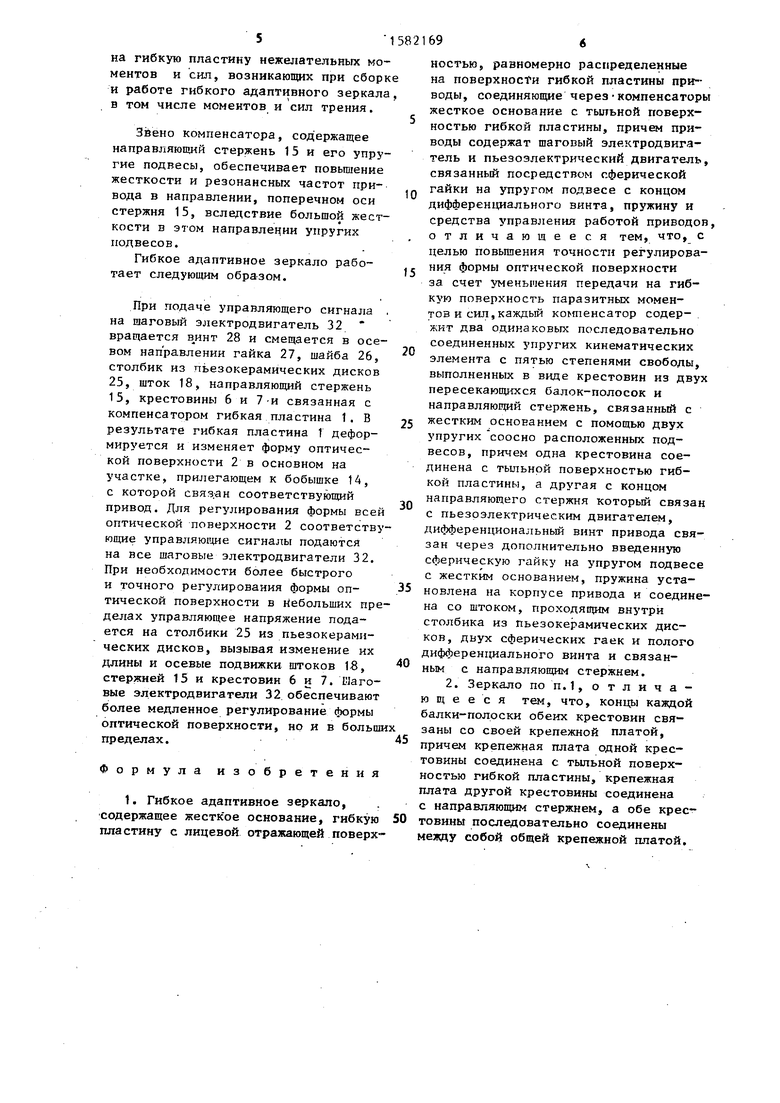
Изобретение относится к оптическому приборостроению, предназначено для использования в адаптивных оптических системах и позволяет повысить точность регулирования формы оптической поверхности. При подаче управляющего сигнала на шаговый электродвигатель 32 происходит смещение в осевом направлении пьезоэлектрических приводов 4 и через компенсаторы 5 деформация отражающей поверхности 2 гибкой пластины 1. В небольших пределах деформация гибкой пластины 1 осуществляется посредством пьезоэлектрических приводов 4. Компенсаторы 5 имеют пять степеней упругой свободы, что обеспечивает умньшение передачи на гибкую пластину 1 паразитных моментов и сил при работе зеркала. 1 з.п. ф-лы, 4 ил.
Изобретение относится к .оптическому приборостоению и может быть использовано в адаптивных оптических системах .
Цель изобретения - повышение точности регулирования формы оптической поверхности за счет уменьшения передачи на гибкую пластину паразитных моментов и сил.
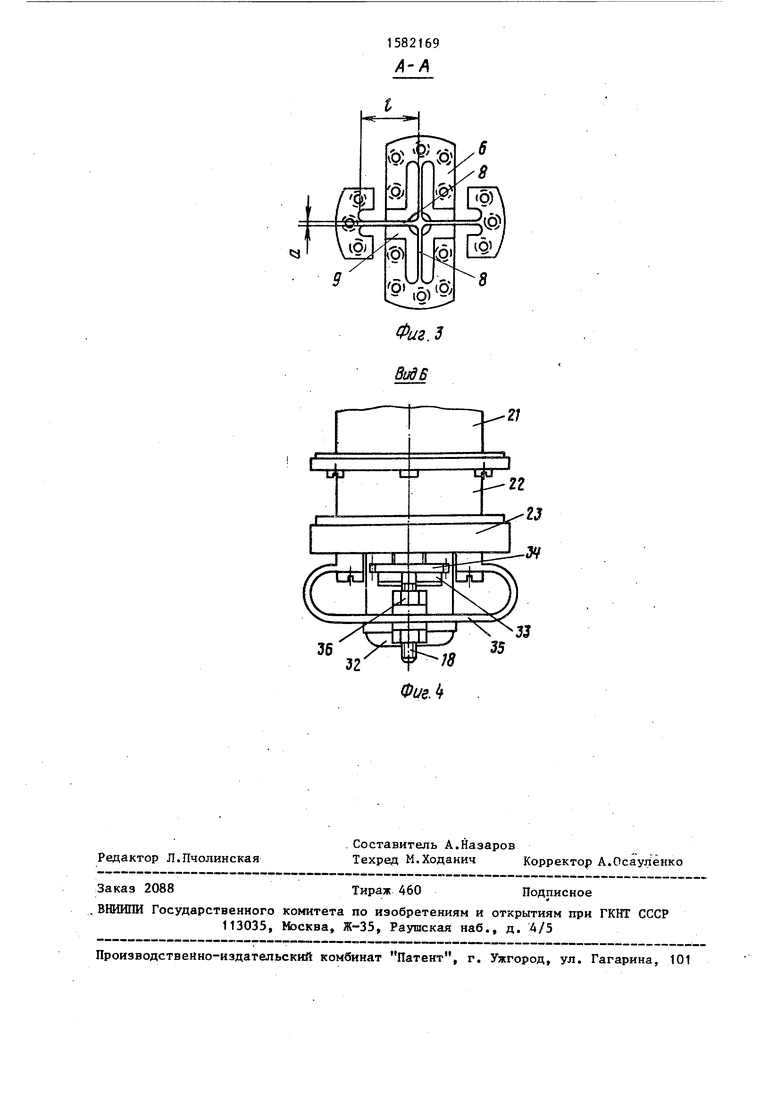
На фиг.1 изображено гибкое адаптивное зеркало, общий вид; на фиг.2 - сечение привода по его оси; на фиг.З- сечение А-А на фиг.2; на фиг.4 - вид по стрелке 15 на фиг.2.
Гибкое адаптивное зеркало содержит гибкую пластину 1 с лицевой отражающей поверхностью 2, жесткое основание 3 и восемнадцать приводов 4, установленных на жестком основании и связанных через компенсаторы 5 с тыльной поверхностью гибкой пластины
i
в точках, равномерно распределенных
по поверхности.
Каждый компенсатор содержит два одинаковых упругих кинематических элемента, выполненных в виде крестовин 6 и 7, которые состоят из двух пересекающихся под прямым углом балок-полосок 8. Концы одной балки-по- лоски 8 крестовины 6 соединены с крепежной платой 9, а концы другой балки-полоски соединены с крепежной платой 10 . Аналогично концы балок- полосок 8 крестовины 7 соединены с крепежными платами 11 и 12, причем платы 10 и 11 являются частями соединительной втулки 13. На тыльной поверхности гибкой пластины 1 выполнены восемнадцать бобышек 14 с резьбой, на которые навернуты крепежные платы 9 компенсаторов 5. Кроме того, гибкая пластина 1 соединена по периСП
00
ю о
СР
метру винтами с жесткими основаниями 3. Плата 12 скреплена винтами с направляющими стержнем 15, а между ними установлена упругая металлическая мембрана 16 кольцевой формы. Внешний край мембраны зажат между торцом цилиндрического стакана 17 и жесткими основанием 3. Второй конец направляющего стержня 15 ввернут в шток 18, а между ним зажат внутренний контур второй упругой металлической мембраны 19, Внешний край мембраны 19 прижат крышкой 20 к другому торцу стакана 17. Таким образом направляющий стержень 15 оказывается связанным с жестким основанием 3 с помощью двух упругих соосно расположенных подвесов. Весь компенсатор, содержащий стержень 15,его упругий подвес, а также два соединенных последовательно упругих кинематических элемента 6 и 7, является упругой конструкцией, в которой отсутствуют силы трения скольжения и качения.
К жесткому основанию 3 крепится корпус привода, содержащий две цилиндрические втулки 21 и 22 и крышку 23. Фланец 24 штока 18 прижат к одному торцу столбика 25 из пьезокерамичес- ких дисков, другой торец которого сопряжен с плоской поверхностью шайбы 26. Б сферическую выемку лайбы 26 входит первая сферическая гайка 27, которая сидит на одном конце полого винта 28 с дифференциальной резьбой. На другом конце винта 28 насажена вторая сферическая гайка 29, которая входит в сферическую выемку крышки 23. С гайками 27 и 29 жестко связаны своими внутренними контурами третья и четвертая маталлические мембраны 30 и 31, расположенные параллельно и соосно первым двум мембранам 16 и 19. Внешние контуры мембран 30 .и 31 зажаты между торцами цилиндри- ческих втулок 21, 22, а также между втулкой 22 и крышкой 23. На крышке 23 установлен шаговый электродвигате 32, который через шестерню 33 соединен с шестерней 34, установленной на конце дифференциального винта 28. На крышке 23 закреплена также пружина 35, которая создает усилие на штоке 18, сжимающее столбик 25 из пьезокер мических дисков и выбирающее люфты в дифференциальной винтовой передаче 27, 28, 29. Это усилие устанавливается гайками 36 такой величины, чтоб
, 5
5 0 50 55
0
максимальные усилия, возникающие при деформации гибкой пластины 1 и растягивающие столбик 25 из пьезокерами- ческих дисков, составляли 50% от сжимающего усилия пружины 35. Мембраны 30 и 31 служат для предотваращения поворота гаек 27 и 29 вокруг оси резьбы, а также обеспечивают самоцентрирование дифференциальной винтовой передачи. С жестким основанием 3 и гибкой пластиной 1 соединен винтами цилиндрический кожух 37 (рис.1). Каждый упругий кинематический элемент 6 и 7 имеет пять степеней свободы, так как одна его крепежная плата может поворачиваться и поступательно смещается, относительно другой крепежной платы вокруг осей X,Y,Z и вдоль осей X,Y, вследствие упругой податливости балок-полосок 8 к изгибу в полости нименьшей жесткости и упругой податливости к закручиванию вокруг продольных осей. Широкие грани балок-полосок 8 расположены параллельно оси Z, что накладывает жесткие связи на относительные смещения крепежных плат в направлении этой оси. Тогда звено компенсатора, содержащее два соединенных последова- тельйо упругих кинематических элемента 6 и 7 , также обладает пятью степенями свободы и является жестким в направлении оси Z - направлении передачи движения от привода к гибкой пластине. Другое звено компенсатора, содержащее направляющий стержень 15 и упругие подвесы обладает лишь одной степенью свободы - стержень 15 может смещаться поступательно вдоль оси Z. Вследствие большой жесткости мембран 16 и 19 в направлении перпендикулярном оси стержня 15, это звено накладывает пять независимых жестких связей на остальные (нежелательные) перемещения и повороты стержня 15. Эти нежелательные смещения и повороты могут возникнуть при сборке и работе гибкого адаптивного зеркала вследствие неточностей его изготовления и сборки. Ослабленные связями нежелательные смещения и повороты стержня 15 передаются на крепежную плату 12 и приходятся на пять степеней свободы звена компенсатора, содержащего два последовательно соединенных упругих кинематических элемента 5 и 7. В результате этого существенно уменьшается передача
на гибкую пластину нежелательных моментов и сил, возникающих при сборк и работе гибкого адаптивного зеркала в том числе моментов и сил трения.
Звено компенсатора, содержащее направляющий стержень 15 и его упругие подвесы, обеспечивает повышение жесткости и резонансных частот привода в направлении, поперечном оси стержня 15, вследствие большой жесткости в этом направлении упругих подвесов.
Гибкое адаптивное зеркало работает следующим образом.
При подаче управляющего сигнала , на шаговый электродвигатель 32 вращается винт 28 и смещается в осевом направлении гайка 27, шайба 26, столбик из пьезокерамических дисков 25, шток 18, направляющий стержень 15, крестовины 6 и связанная с компенсатором гибкая пластина 1. В результате гибкая пластина 1 деформируется и изменяет форму оптической поверхности 2 в основном на участке, прилегающем к бобышке 14, с которой связан соответствующий привод. Для регулирования формы всей оптической поверхности 2 соответствующие управляющие сигналы подаются на все шаговые электродвигатели 32. При необходимости более быстрого и точного регулирования формы оп- тической поверхности в Небольших пределах управляющее напряжение подается на столбики 25 из пьезокерамических дисков, вызывая изменение их длины и осевые подвижки штоков 1В, стержней 15 и крестовин 6 и 7. Шаговые электродвигатели 32 обеспечивают более медленное регулирование формы оптической поверхности, но и в больши
пределах.
Формула изобретения
0
5
0
5 5 0
5
0
696
ностью, равномерно распределенные на поверхности гибкой пластины приводы, соединяющие черезкомпенсаторы жесткое основание с тыльной поверхностью гибкой пластины, причем приводы содержат шаговый электродвигатель и пьезоэлектрический двигатель, связанный посредством сферической гайки на упругом подвесе с концом дифференциального винта, пружину и средства управления работой приводов, отличающееся тем, что, с целью повышения точности регулирования формы оптической поверхности за счет уменьшения передачи на гибкую поверхность паразитных моментов и сил, каждый компенсатор содержит два одинаковых последовательно соединенных упругих кинематических элемента с пятью степенями свободы, выполненных в виде крестовин из двух пересекающихся балок-полосок и направляющий стержень, связанный с жестким основанием с помощью двух упругих соосно расположенных подвесов, причем одна крестовина соединена с тыльной поверхностью гибкой пластины, а другая с концом направляющего стержня который связан с пьезоэлектрическим двигателем, дифференциональный винт привода связан через дополнительно введенную сферическую гайку на упругом подвесе с жестким основанием, пружина установлена на корпусе привода и соединена со штоком, проходящим внутри столбика из пьезокерамических дисков, двух сферических гаек и полого дифференциального винта и связанным с направляющим стержнем.
я к
6912851
1582169
А-А
18
ФиеЛ
| Патент США J 4295710, кл | |||
| Способ приготовления консистентных мазей | 1912 |
|
SU350A1 |
