1
(21)4485660/31-12
(22)20.09;88
(46) 15,08.90. Бгол. № 30
(71)Киевский политехнический институт им. 50-летия Великой Октябрьской социалистической революции
(72)В.Б.БрагИн, И.Г.Никольская, С.М.Ахтарова и А.М.Ващенко
(53)681.185 (088.8)
(56)Авторское свидетельство СССР Р 1344432, кл. В 07 С 5/10, 1987.
(54)УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ИЗДЕЛИЙ
(57)Изобретение относится к робототехнике и может быть использовано в системах управления робототехнически- ми комплексами и адаптивными роботами в качестве сенсорного устройства при работе в реальном масштабе времени. Цель изобретения - повышение
точности ориентации. Устройство содержит две линейки позиционных оптических датчиков, каждый из которых направлен под заданным углом относительно друг друга, генератор импульсов и схемы выделения сигналов, обеспечивающие подсчет импульсов, по- ступаюгщх с каждого из датчиков, в соответствующем счетчике за время прохождения объекта в рабочей зоне данного датчика. Число импульсов зависит от расположения изделия на транспортере и совпадает с заданным эталои- ным оа змеромт,олько в том датчике,угол направления луча которого относительно направления движения транспортера совпадает с углом ориентации объекта на транспортере. Код, формируемый соответствующим счетчиком, дешифрируется в управляющие сигналы исполнительному механизму устройства ориентации. 2 ил.
а «
сл
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для распознавания изделий | 1986 |
|
SU1344432A1 |
| Устройство для распознавания и учета предметов по типоразмеру | 1987 |
|
SU1460731A1 |
| Устройство для поиска информации на микрофильме | 1986 |
|
SU1376101A1 |
| Устройство для управления положением объекта | 1985 |
|
SU1327068A1 |
| Устройство для программного управления | 1985 |
|
SU1273883A1 |
| Генератор случайных чисел | 1989 |
|
SU1684793A1 |
| Устройство контроля | 1984 |
|
SU1198542A1 |
| Генератор случайных чисел | 1990 |
|
SU1807482A1 |
| Устройство для поиска информации на микрофильме | 1984 |
|
SU1236507A1 |
| Устройство для исследования графов | 1987 |
|
SU1411773A1 |
Изобретение относится к робототехнике и может быть использовано в системах управления робототехническими комплексами и адаптивными роботами в качестве сенсорного устройства при работе в реальном масштабе времени. Цель изобретения - повышение точности ориентации. Устройство содержит две линейки позиционных оптических датчиков, каждый из которых направлен под заданным углом α относительно друг друга, генератор импульсов и схемы выделения сигналов, обеспечивающие подсчет импульсов, поступающих с каждого из датчиков, в соответствующем счетчике за время прохождения объекта в рабочей зоне данного датчика. Число импульсов зависит от расположения изделия на транспортере и совпадает с заданным эталонным размером только в том датчике, угол направления луча которого относительно направления движения транспортера совпадает с углом ориентации объекта на транспортере. Код, формируемый соответствующим счетчиком, дешифрируется в управляющие сигналы исполнительному механизму устройства ориентации. 2 ил.
Изобретение относится к робототехнике и может быть использовано для упорядочения и подготовки рабочей среды робота при решении задач, связанных с ориентацией изделий различной формы.
Цель изобретения - повышение точности ориентации.
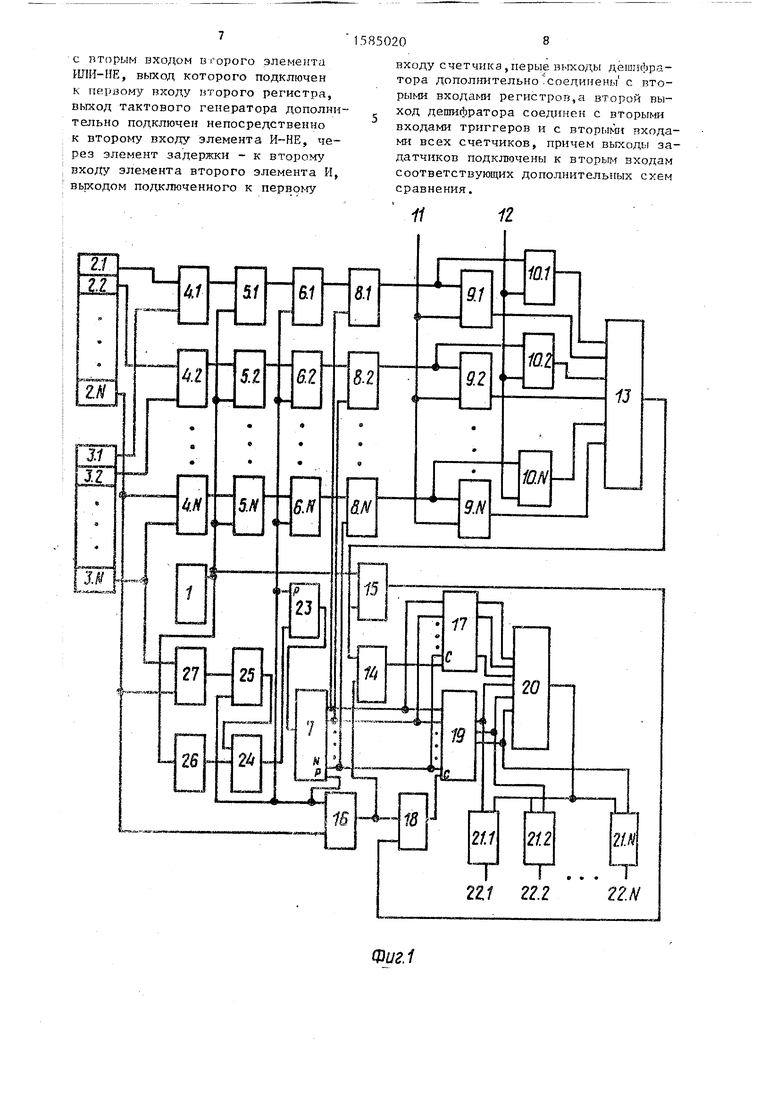
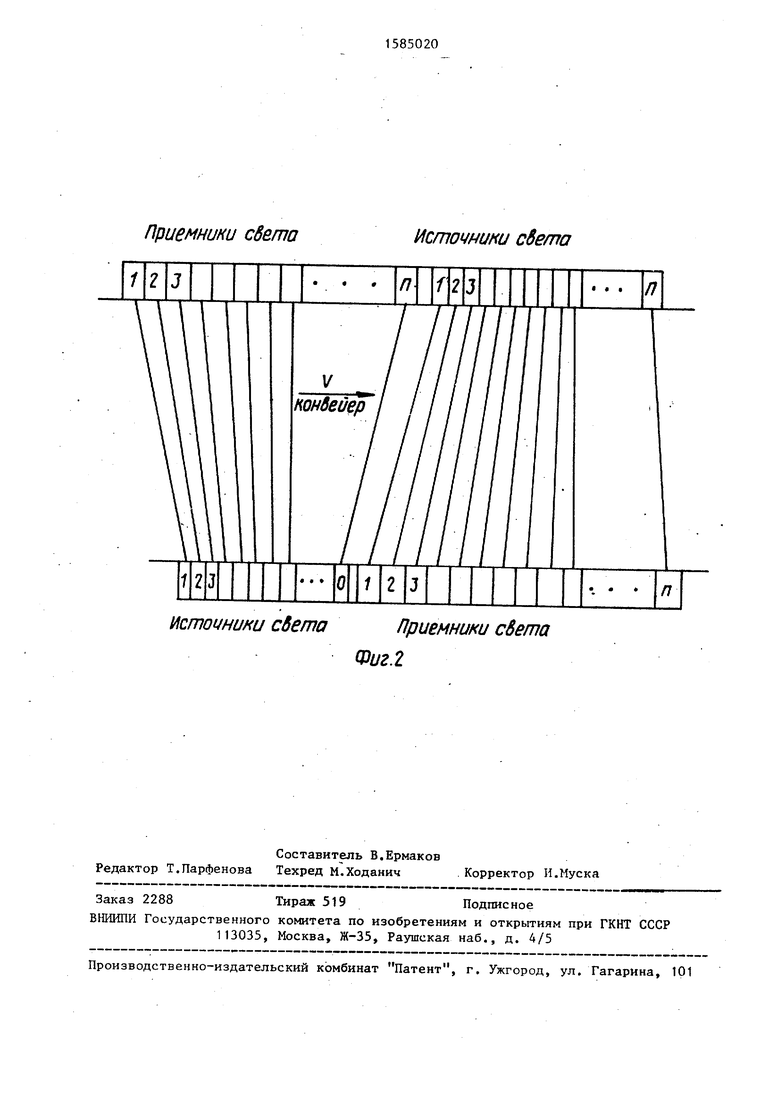
На фиг. 1 представлена функциональная схема предлагаемого устройства; на фиг. 2 - схема расположения линеек позиционных фотодатчнков.
Устройство содержит тактовый генератор 1, матрицы фотодатчиков, выполненные в виде линеек 2 и 3,
элементы ИЛИ 4, элементы И 5, счетчики 6, дешифратор 7, схемы И 8, схемы 9 и 10 сравнения, задатчики 11 и 12, элементы ИЛИ-НЕ 13 и 14, элемент И-НЕ 15, триггер 16, регистр 17, элемент И 18, регистр 19, схему 20 сравнения, схемы И 21, исполнительные механизмы 22, счетчик 23, элемент И 24, триггер 25, элемент 26 задержки, элемент ИЛИ 27.
Устройство может быть выполнено на стандартных микросхемах. В качестве блока 1 может быть использован любой генератор прямоугольных импульсов с требуемой скважностью,
ел
00 СП
о ю
о
а в качестве блока 26 - цепочка RC с заданными параметрами, выбираемом таким образом, чтобы время задержит было больше времени сравнения кодов В качестве линеек фотодатчиков могут быть использованы расположенные друг за другом датчики, построенные на фоторезисторах СФЗ-2А, в качестве- остальных блоков могут быть ИСПО зованы микросхемы серии К155, в качест триггеров могут быть использованы ,1К-триггеры.
Устройство работает следующим образом,
В начальный момент времени все счетчики содержат О. Импульсы с генератора 1 тактовых импульсов заблокированы нулевыми сигналами с датчиков, выходные сигналы устрой- ства нулевые, оба триггера 25 и 16 находятся в нулевом состоянии. При появлении 1 на выходе датчика 2.1 первой линейки 2 вследствие попадания движущегося объекта в его зону действия схема ИЛИ 4.1 выделяет это сигнал, который подается на второй вход схемы первой группы п схем И 5.1, разрешая прохождение импульсов к счетчику 6.1, который ведет счет импульсов за время затемнения первого датчика. Схема И второй группы п схем И 8.1 заблокирована нулевым сигналом дешифратора 7. По мере движения объект попадает в пол действия датчика 2.2 линейки 2, 1 с его выхода через схему ИЛИ 4.2 ра решает прохождение импульсов с генератора 1 тактовых импульсов через схему И 5.2 первой группы п схем И на счетчик 6,2 до тех пор, пока на выходе второго датчика не появится нулевой сигнал отсутствия объекта. Объект поступает в зону действия 3-го датчика и т.д. до n-го датчи- ка. По мере прохождения объекта мим датчиков счетчики 6 формируют код каждого датчика линейки 2. В момент выхода объекта из луча датчика 2.N линейки 2 сигнал с датчика 2.N через (п + 1)-ю схему ИЛИ 27 перебрасывает первый триггер 25 в едининое состояние, разрешая прохождение импульсов на (п + 1)-й счетчик 23, соединенный с дешифратором 7, .которым обеспечивает подачу сигнала со счетчика 6.i в параллельном коде на схемы 9.1 и 10.1 сравнения первой и второй групп п схем сравнения в
Q
5
0 5 Q Q
0
5
соответствии с i-ым кодом (п + 1)- го счетчика 23. На вторые входы 9 и 10 сравнения обеих групп (управляющие входы 11 и 12 соответственно) подаются два эталонных кода, соответствующих фронтальной и боковой проекциям ориентируемого объекта. При совпадении кода 1-го датчика с эталоном на выходе соответствующей схемы сравнения появляется 1. Элемент 26 задержки времени обеспечивает сдвиг серии импульсов на величину, необходимую для сравнения кодов. При использовании компаратора К555СП1 эта величина не должна быть меньше 24 не. Таким образом, (п + 1)-й счетчик 23 через дешифратор 7 последовательно подключает к схемам сравнения двух групп п схем 9 и 10 сравнения все п датчиков, после, чего сигнал переполнения дешифратора 7 обнуляет все счетчики. Выходом переполнения дешифратора 7 является (п + 1)-й выход, соответствующий выходу переполнения n-разрядного счетчика, где число п определяется количеством датчиков (в линейке 2 или 3. Можно вместо этого непосредственно использовать выход переполнения (п + 1)-го счетчика 23. Линейки 2 и 3 датчиков содержат п датчиков каждая. Датчики имеют веерную ориентацию, угол между любыми двумя соответствующими датчиками линеек одинаков и равен d. Расстояние между линейками 2 и 3 таково, что за время прохождения объекта от датчика 2.N линейки 2 до датчика 3.1 линейки 3 происходит сравнение с эталонами п счетчиков 6, содержащий информацию с линейки 2. При реализации устройства на микросхемах серии К155 расстояние между линейками датчиков определяется временем прохождения сигнала тактового генератора 1 по цепочке: элемент 26 задержки - (п + 1)-ая схема И 24 - (п + 1)-й счетчик 23 - дешифратор 7 - схема И второй группы п схем И 8 - элемент сравнения группы схем 9 и 10 сравнения - первая схема ИПИ-НЕ 13 - вторая схема ИЛИ-НЕ 14, которое составляет примерно 200.п не (188 не). Таким образом, время перемещения объекта от последнего датчика линейки 2 до первого линейки 3 не должно быть меньше, чем 200,п не. Аналогично первому такту, попадание
объекта в зону действия датчика 3.1 линейки 3 приводит к тому, что единичный сигнал с его выхода через схемы ИЛИ 4.1 и И 5.1 первой группы п схем И разрешит счет,чику 6.1 счет импульсов. Как только объект выходит из поля действия последнего датчика, нулевой сигнал через (п + 1)-ю схему ИЛИ 27 и второй триггер 16 разрешает прохождение через (п + 1)схемы И 24 импульсов на (п + 1)-й счетчик 23. Сравнение производится аналогично. Когда при последовательном переборе счетчиков, содержащих информацию о датчиках первой линейки матрицы 2, на выходе одной из схе сравнения обеих групп п схем сравнения 9.1 или 10.1 появляется 1, она через вторую схему ИЛИ-НЕ 14 и схему И-НЕ 15 разрешает запись в первый регистр 17 содержимого дешифратора 7, соответствующего номеру датчика i. Так как переполнения дешифратора 7 еще не было, через второй триггер 16 на второй вход второй схемы ИЛИ-НЕ 14 подается нулевой сигнал, который обеспечивает запись только в первый регистр 17, блокируя одновременно (п + 1)-ю схему И 18 запись во второй регистр 19. При сравнении инфрмации с датчиков линейки 3 второй триггер 16 уже будет переброшен в единичное состояние (сигнал переполнения дешифратора 7 уже был) и через вторую схему ИЛИ-НЕ 14 блокирует первый регистр 17, разрешает через (п + 1)-ю схему И 1 8 запись содержимого дешифратора 7 во второй регистр 19 при наличии сигнала равенства кода датчика 3.1 линейки 3 с эталоном. Содержимое первого и второго регистров 17 и 19 сравнивается в (2п + 1)-й схеме 20 сравнения и в случае равенства через схему третьей группы п схем И 21 на выходах устройства 22.1-22.N устанавливается единица в разряде 22.1, где 1 - номер датчика ,для которого было получено совпадение с эталоном, и , соответственно, угол ориентации которого равен углу ориентации объекта. Полученный угол ориентации объекта затем отрабатывается исполнительным механизмом.
Формула изобретения
Устройство для ориентации изделий содержащее матрицу фотодатчиков,
блок оценки ориентации изделий, со-, держащий задатчики, генератор тактовых импульсов, связанный с первыми
входами первых элементов И, элемент ИЛИ, выходом соединенный с первым входом первого триггера, выход которого связан с первым входом второго элемента И, выход счетчика соединен с входом дешифратора, первые выходы которого подключены к первым входам третьих элементов И, второй триггер, выходом подключенный к первому входу четвертого элемента И,
5 регистры, выходами подключенные к соответствующим входам схемы сравнения, и исполнительные механизмы, о тли чающе е с я тем, что, с целью повышения точности ориента0 ции, оно содержит дополнительную матрицу фотодатчиков, а блок оценки ориентации дополнительно содержит элементы ИЛИ-НЕ, элемент И-НЕ, элемент задержки и дополнительные эле5 менты И, счетчики схемы сравнения и элементы И, выходами связанные с соответствующими исполнительными механизмами, выходы всех разрядов матриц фотодатчиков соединены с со0 ответствующими входами дополнительных элементов ИЛИ, выходами связанных с последовательно соединенными первыми элементами И, дополнительными счетчиками, вторыми элементами И и первыми дополнительными схемами сравнения, первые входы которых объединены с первыми входами вторых дополнительных схем сравнения, причем выходы всех дополнительных схем
0 сравнения подключены к входам первого элемента ИЛИ-НЕ, выходом связанного с первыми входами второго элемента ИЛИ-НЕ и элемента И-НЕ, выходом подключенного к второму входу
5 четвертого элемента И, выходом связанного с первым входом первого регистра, выходы которого дополнительно связаны с первыми входами дополнительных элементов И, а выход
0 схемы сравнения соединен с вторыми входами дополнительных элементов И, выход последнего разряда первой матрицы фотодатчиков дополнительно соединен с первым входом элемента ИЛИ,
е выход последнего разряда второй матрицы фотодатчиков дополнительно связан с вторым входом элемента ИЛИ и с первым входом второго триггера, выходом дополнительно соединенного
5
с вторым входом второго элемента ИЛИ-НЕ, выход которого подключен к первому входу второго регистра, выход тактового генератора дополнительно подключен непосредственно к второму входу элемента И-НЕ, через элемент задержки - к второму входу элемента второго элемента И, выходом подключенного к первому
входу счетчика,перые выходы дешифратора дополнительно соединены с вторыми входами регистров,а второй выход дешифратора соединен с вторыми входами триггеров и с вторыми входами всех счетчиков, причем выходи за- датчиков подключены к вторым входам соответствующих дополнительных схем сравнения.
11
12
Фиг.1
Приемники света
1
J
Источники сбетаПриемники сВета
Фиг.2
Источники света
л
Г
П
1
2
л
