11327068
И;з1о 6ретение относится к робототехнике и может быть применено для ориентации объектов манипулирования в рабочей зоне роботов, входящих в состав с комплексов, содержащих транспортер и предориентирующее устройство, которые обеспечивают помещение изделий одного типа одной и той же поверхностью к плоскости ориентации в устой- ю чивом положении.
Цель изобретения - расширение области применения устройства за счет увеличения числа точек позиционировамеханизм заб.покирован, сигналы с блока 3 опроса фотодатчиков отсутствуют выходы блока 8 сравнения находятся в состоянии О.
После помещения изделия на поворотную площадку исполнит&пьного механизма при наличии разрешающего сигнала с вычислительного блока 9 на блоке 3 опроса последовательно опра- ишваемые в порядке размещения фотодатчики вырабатывают сигналы Q и 1 в зависимости от засветки, причем 1 соответствует затемненное состояния при ориентации и типов управляемых 5 кие и наоборот О - засвеченное. объектов.Синхросигнапы с выхода блока 3 опроНа фиг. 1 изображена функциональная схема устройства для управления положением объектаJ на фиг. 2 - схема
20
алгоритма работы вычислительного блока при ориентации изделий.
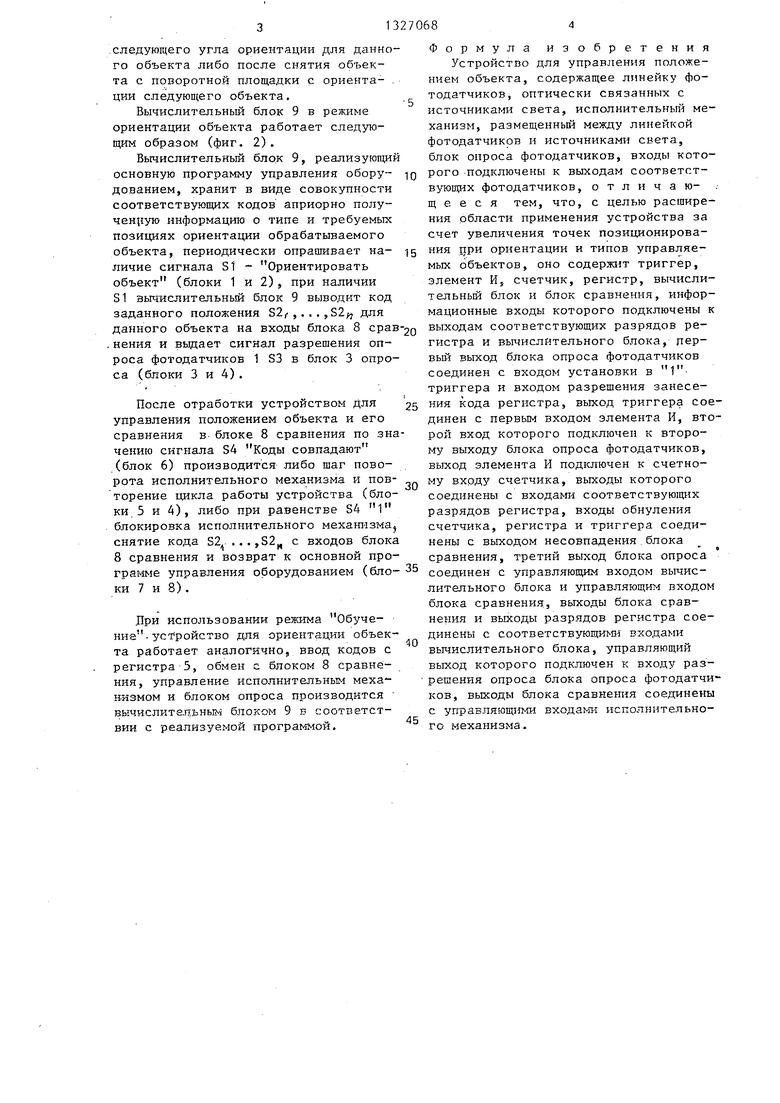
Выходы линейки фотодатчиков 1 , Ij , ..., Ij, устройства 2 для управления положением объекта подключены к входам блока 3 опроса фотодатчиков, первый выход которого подключен к входу установки в 1 триггера 4 и разрешающему входу занесения регистра 5, второй выход блока 3 опроса подклю чей к второму входу элемента 6 И, к. первому входу которого подключен выход триггера 4, выход элемента 6 И соединен со счетным входом двоичного счетчика 7, выходы которого поразрядно соединены с входами регистра 5, а, выходы последнего соединены с соответствующими входами блока 8 сравнения, на остальные входы которого подключены соответствующие выходы вычислительного блока 9, входы которого также соединены с выходами разрядов регистра 5 и блока 8 сравнения, выход совпадения блока 8 сравнения соединен с управляющим входом исполнительного механизма (не показан), управляющий вход блока 3 опроса фотодатчиков соединен с выходом вычислительного блока 9, третий выход блока 3 опроса фотодатчиков соединен с входом вычислительного блока 9 и входом разрешения сравнения блока 8 сравнения, входы обнуления триггера 4, регистра 5 и счетчика 7 соединены с выходом совпадения блока 8 сравнения.
Устройство для управления лоложе- .нием объекта работает следующим образом.
В исходном состоянии триггер 4 и счетчик 7 обнулены, исполнительный
са поступают на вход элемента 6 И и при наличии первой 1 Б последова тельности на информационном выходе блока 3 опроса, перебрасывающей триггер 4 в единичное состояние, начинают проходить на счетный вход счетчика 7, который осуществляет их счет. Каждая 1 в последователыюсти сигналов 25 с информационного выхода блока 3 обес печивает перезапись кода со счетчика
7в регистр 5., код в регистре 5 соот ветствует длине проекции изделия на поле фотодатчиков. Код, хранязцийся
gg в регистре 5, по окончании цикла опроса фотодатчиков блоком 3 и появлении сигнала Конец опроса на третьем выходе блока 3 сравнивается в блоке
8сравнения с задаваемым вычислитель ным блоком 9 кодом. Если коды не сов падают, на соответствующем выходе бл ка 8 сравнения появляется 1, обнуляющая триггер 4, регистр 5, счетч-ик
7 и разрешающая поворот исполнительного MexaHMSNsa вместе с изделием на угол приращения и выдачу разрешающего сигнала на блок 3 опроса, после чего цикл опроса фотодат шков линейки 1, формирование кода з регистре 5 и его cpaBHGitiie с заданттым повторя
40
45
50
55
ется. I
При совпадении кодов в блоке 8 сравнения вырабатывается сигнал совпадения, являющ1 У ся признаком оконча ния ориентации изделия, по которому вычислительньй блок 9 переходит на соответствующую управляющую программу. При этом исполнительный механизм блокируется, заданньш код с выхода вычислительного блока 9 снимается, на выходе несовпадения блока 8 сравнения появляется
обнуляющая три
гер 4, рех истр 5 и счетчик 7, после чего устройство готово к отработке
механизм заб.покирован, сигналы с блока 3 опроса фотодатчиков отсутствуют, выходы блока 8 сравнения находятся в состоянии О.
После помещения изделия на поворотную площадку исполнит&пьного механизма при наличии разрешающего сигнала с вычислительного блока 9 на блоке 3 опроса последовательно опра- ишваемые в порядке размещения фотодатчики вырабатывают сигналы Q и 1 в зависимости от засветки, причем 1 соответствует затемненное состоя0
са поступают на вход элемента 6 И и при наличии первой 1 Б последовательности на информационном выходе блока 3 опроса, перебрасывающей триггер 4 в единичное состояние, начинают проходить на счетный вход счетчика 7, который осуществляет их счет. Каждая 1 в последователыюсти сигналов 5 с информационного выхода блока 3 обеспечивает перезапись кода со счетчика
7в регистр 5., код в регистре 5 соответствует длине проекции изделия на поле фотодатчиков. Код, хранязцийся
g в регистре 5, по окончании цикла опроса фотодатчиков блоком 3 и появлении сигнала Конец опроса на третьем выходе блока 3 сравнивается в блоке
8сравнения с задаваемым вычислительным блоком 9 кодом. Если коды не сов- падают, на соответствующем выходе бло - ка 8 сравнения появляется 1, обнуляющая триггер 4, регистр 5, счетч-ик
7 и разрешающая поворот исполнительного MexaHMSNsa вместе с изделием на угол приращения и выдачу разрешающего сигнала на блок 3 опроса, после чего цикл опроса фотодат шков линейки 1, формирование кода з регистре 5 и его cpaBHGitiie с заданттым повторя0
5
0
5
ется. I
При совпадении кодов в блоке 8 сравнения вырабатывается сигнал совпадения, являющ1 У ся признаком окончания ориентации изделия, по которому вычислительньй блок 9 переходит на соответствующую управляющую программу. При этом исполнительный механизм блокируется, заданньш код с выхода вычислительного блока 9 снимается, на выходе несовпадения блока 8 сравнения появляется
обнуляющая триггер 4, рех истр 5 и счетчик 7, после чего устройство готово к отработке
следующего угла ориентации для данного объекта либо после снятия объекта с поворотной площадки с ориента- ции следуюп1его объекта.
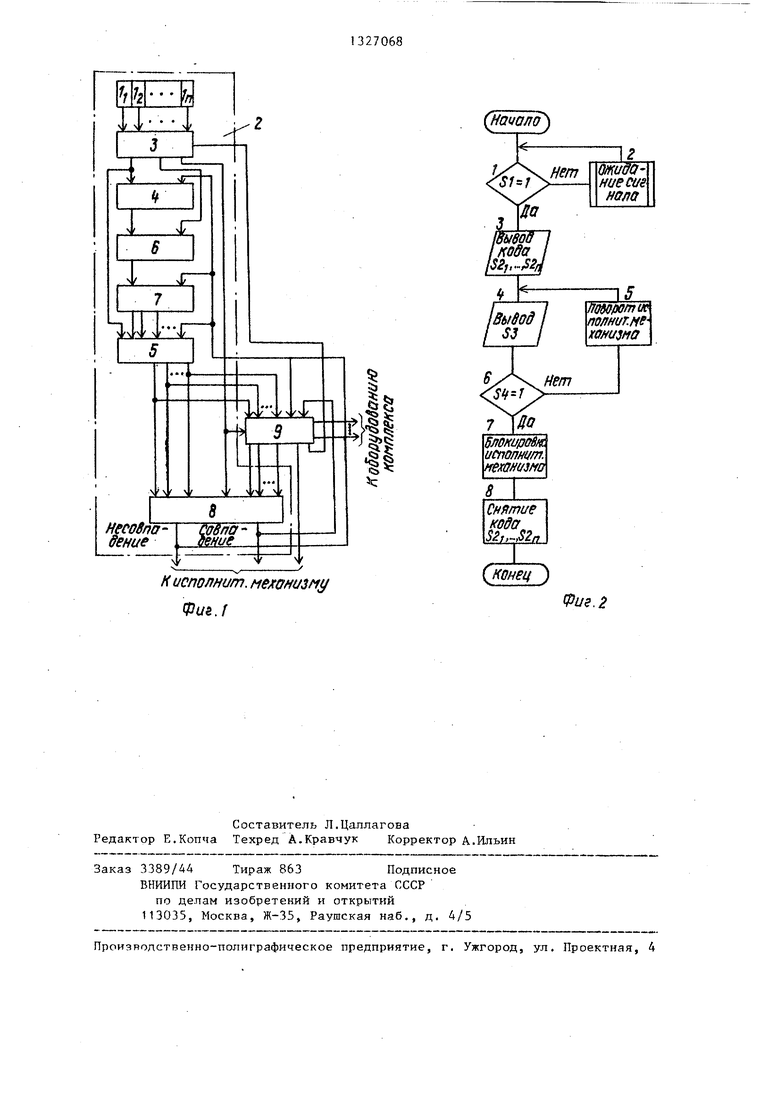
Вычислительный блок 9 в режиме ориентации объекта работает следующим образом (фиг. 2).
Вычислительный блок 9, реализующи основную программу управления обору- дованием, хранит в виде совокупности соответствующих кодов априорно полу- ченцую информацию о типе и требуемых позициях ориентации обрабатываемого объекта, периодически опрашивает на- личие сигнала S1 - Ориентировать объект (блоки 1 и 2), при наличии S1 вычислительный блок 9 выводит код заданного положения 32 ,. . . ,52; данного объекта на входы блока 8 cpaB .нения и выдает сигнал разрешения опроса фотодатчиков 1 S3 в блок 3 опроса (блоки 3 и 4).
После отработки устройством для управления положением объекта и его сравнения в блоке 8 сравнения по значению сигнала S4 Коды совпадают (блок 6) производится либо шаг поворота исполнительного механизма и пов- торение цикла работы устройства (блоки. 5 и 4), либо при равенстве S4 1 блокировка исполнительного мехагшзма снятие кода 32 ...,32, с входов блока 8 сравнения и возврат к основной программе управления оборудованием (бло- ки 7 и 8).
.При использовании режима Обучение - ус -геройств о для ориентации объекта работает аналогично, ввод кодов с регистра 5, обмен с блоком 8 сравнения, управление исполнительным механизмом и блоком опроса производится - вычислительным блоком 9 Е соответствии с реализуемой программой.
g 5 Q
5 5
0
5
Формула изобретения Устройство для управления положением объекта, содержащее линейку фотодатчиков, оптически связанных с источниками света, исполнительный механизм, размещенньпЧ между линейкой фотодатчикрв и источниками света, блок опроса фотодатчиков, входы которого подключены к выходам соответствующих фотодатчиков, отличающееся тем, что, с целью расширения области применения устройства за счет увеличения точек позиционирования при ориентации и типов управляемых объектов, оно содержит триггер, элемент И, счетчик, регистр, вычисли- тельньй блок и блок сравнения, информационные входы которого подключены к выходам соответствующих разрядов регистра и вычислительного блока, первый выход блока опроса фотодатчиков соединен с входом установки в триггера и входом разрешения занесения кода регистра, выход триггера соединен с первым входом элемента И, второй вход которого подключен к второму выходу блока опроса фотодатчиков, выход элемента И подключен к счетному входу счетчика, выходы которого соединены с входами соответствую1цих разрядов регистра, входы обнуления счетчика, регистра и триггера соединены с выходом несовпадения блока сравнения, третий выход блока опроса соединен с управляющим входом вычислительного блока и управляющим входом блока сравнения, выходы блока сравнения и выходы разрядов регистра соединены с соответствующими входами вычислительного блока, управляющий выход которого подключен к входу разрешения опроса блока опроса фотодатчиков, выходы блока сравнения соединены с yпpaБЛЯющIiми входа}в1 исполнительного механизма.
К исполнит, мелонизму Фи&.1
Составитель Л.Цаплагова Редактор Е.Копча Техред А.Кравчук Корректор А.Ильин
Заказ 3389/44 Тираж 863 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
Фие.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации изделий | 1988 |
|
SU1585020A1 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU477394A1 |
| Устройство для распознавания изделий | 1986 |
|
SU1344432A1 |
| Устройство для подсчета штучных предметов,перемещаемых конвейером | 1985 |
|
SU1265817A1 |
| Устройство контроля линейных размеров движущихся изделий | 1982 |
|
SU1146550A1 |
| Устройство для программного управления | 1984 |
|
SU1198461A1 |
| Устройство для автоматического адресования штучных объектов | 1971 |
|
SU529983A1 |
| Устройство для распознавания и учета предметов по типоразмеру | 1987 |
|
SU1460731A1 |
| Устройство определения центров круглых предметов для систем управления роботом-манипулятором технологического конвейера | 1973 |
|
SU455322A1 |
| Устройство для сортировки объектов по типоразмеру | 1984 |
|
SU1212631A1 |
Изобретение относится к робототехнике и предназначено для управления ориентацией объектов манипулирования в рабочей зоне роботов, входящих в состав комплексов, управляемых программируемым вычислительным устройством. Цель изобретения - расширение области применения устройства. Устройство состоит из линейки фотодатчиков, оптически связанных с источниками света, исполнительного механизма, блока опроса фотодатчиков, триггера, элемента И, счетчика, регистра, блока сравнения и вычислительного блока. Сущность изобретения заключается в следующем. При пошаговом повороте ориентируемого изделия исполнительным механизмом в поле действия фотодатчиков счетчиком и регистром формируется код, значение которого соответствует длине проекции изделия на поле фотодатчиков. Формируемьп код сравнивается в блоке сравнения с заданным кодом, хранящимся в управляющем вычислительном устройстве комплекса, при совпадении кодов устройство вьщает сигнал, блокирующий исполнительный механизм и информирующий вычислительный блок об окончании ориентации. В противном случае исполнительным механизмом осуществляется следующий шаг поворота, и цикл формирования кода и сравнения повторяется. 2 ил. Q (Л со ьо о О5 00
| Авторское свидетельство СССР № 758084, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для регулирования положения объекта | 1977 |
|
SU717731A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
