сд
00
а
00- 00
Изобретение относится к подъемно- транспортному машиностроению, в частности к непрерывному пассажирскому транспорту, и может быть использован в качестве привода тоннельных эскалаторов, предназначенных для больших высот подъема.
Целью изобретения является снижение габаритов привода, а следователь «о, и размеров маишнного помещения, ja также упрощение обслуживания приво- )да и его ремо нта.
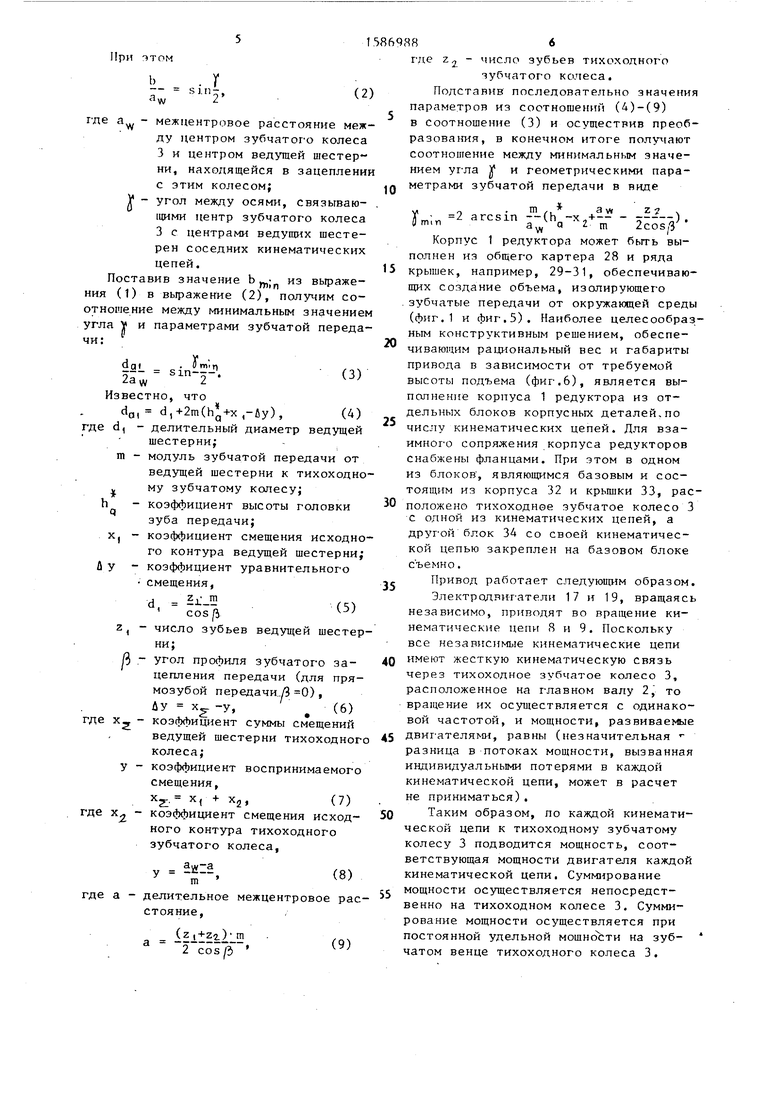
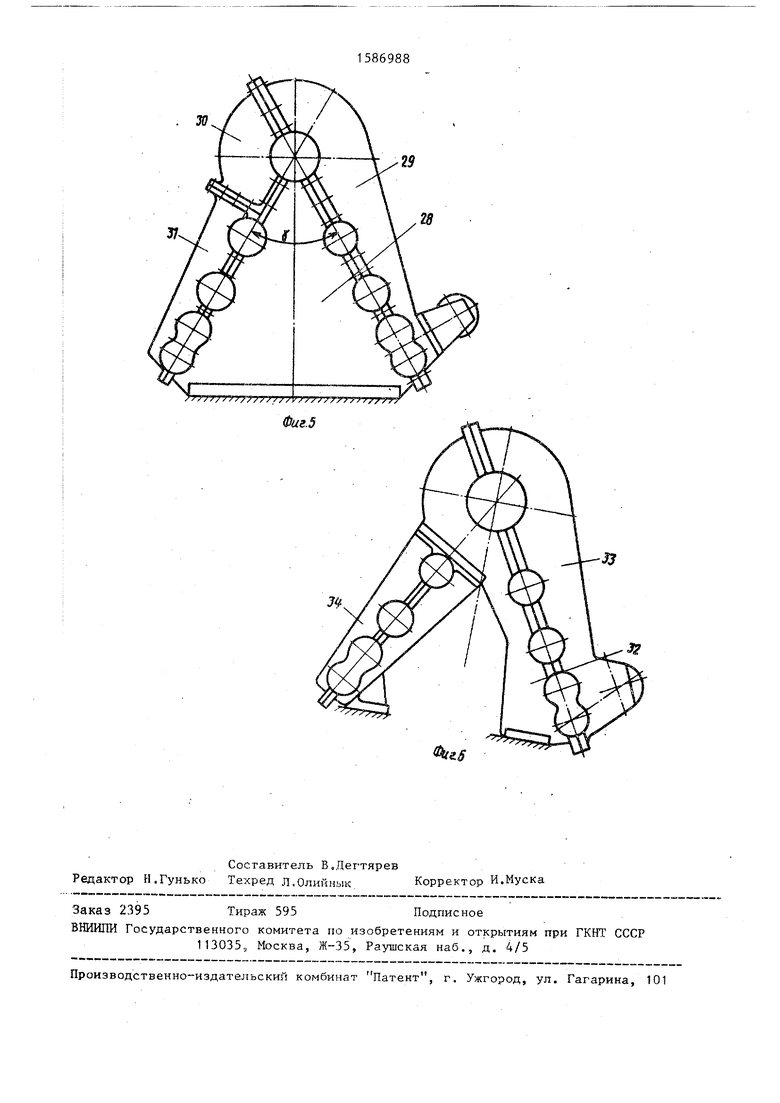
: На фиг,1 схематично представлена :трасса эскалатора с приводом, общий ;вид; на фиг.2 - вид А на фиг.1; на фиг.З - привод; на фиг.4 - разрез Б-Б на фиг.З, на фиг.З - привод эскалатора; на фиг.6 - то же, вариант.
Привод эскалатора включает корпус 1 редуктора с размещенным в нем главным валом 2 эскалатора, на котором закреплено тихоходное зубчатое коле- :со 3, находящееся в зацеплении с не менее чем двумя ведущими шестернями 4 и 5, На г лавном валу 2 также разме щены тяг овые звездочки 6, обеспечивающие перемещение лестничного полотна 7. Привод выполнен в виде размещенны в корпусе 1 редуктора и установленны под углом у друг к другу по разные Стороны от вертикальной плЬскости е-е, проходящей через ось главного вала 2, кинематических цепей 8 и 9 ;по числу находящихся в зацеплении с выходным зубчатым колесом 3 ведуищз;: шестерен 4 и 5. Каждая из кинематических цепей 8 и 9 редукторов содержит входную ступень, включающую в себя входной вал 10 или 11 с шестерней 12 или 13, находящейся в зацеплении с зубчатым колесом -14 или 15, соответственно. Входной вал 10 кине- матической цепи 8 редуктора посредст вом муфты 16 связан с электродвигателем 17, а вал 11 цепи 9 через муфту 18 связан с электродвигателем 19. Электродвигатели 17 и 19 размещены таким образом, что их продольные оси параллельны оси главного вала 2, а их габариты не выходят за габариты лестничного полотна 7.
, Вторая ступень каждой кинематической цепи 8, 9 редуктора состоит из валов-щестерен 20 или 21 и нaxoдящ i x ся в зацеплении с ними зубчатых коле 22 и 23 соответственно,Последняя ступень кинематических цепей 8 и 9 сос
тоит .из валов-щестерен 24 и 25 и соответственно связанных с ними шестерен 4 и 5. Ведущие шестерни 4 и 5 размещены на неподвижных осях 26 на сферических подшипниках 27.
Значение угла между осями f-f и k-k ,1 связывающими центры ведуш 1х щестерен 4 и 5 кинематических цепей 8 и 9 с центром тихоходного зубчатого
колеса
h q
z b
определяется выражением:
arcsin- -( -У - -. О ауу а 2 m 2cos| i
где m - модуль зацепления ведущих
шестерен с тихоходным зубчатым колесом;
межцентровое расстояние между центром тихоходного зубчатого колеса и центром ведущей шес- терни;
коэффициент высоты головки зуба зубчатой передачи; коэффициент смещения исходного контура тихоходного зубчатого колеса;
число зубьев тихоходного зубчатого колеса;
Б - угол профиля зубчатого зацепления передачи (для прямозу- бых передач А 0 и cos 1). В общем виде эта зависимость представляет собой неравенство, в котором минимальное значение угла У определяет собой минимально возможный объем и габариты привода, выраженные через межцентровое расстояние и геометрические параметры тихоходного зубчатого колеса.
Минимальное расстояние 2Ь между ведущими шестернями 4 и 5 в этом случае (фиг.З) может составлять величину равную дв ум радиусам окружностей выступов зтих колес, т.е.
mi п
da
(1)
де b
П1 П
011
минимальное расстояние от центра ведущей шестерни, находящейся в зацеплении с тихоходным зубчатым колесом, до вертикальной точки симметрии, проходящей через ось главного вала;
диаметр окружности выступов ведущей шестерни, находящейся в зацеплении с тихоходным зубчатым колесом.
При чтом
-- SU1-,
«TW i
I
где a - межпентровое расстояние между центром зубчатого колеса 3 и центром ведущей шестерни, находящейся в зацеплении с этим колесом;
- угол между осями, связываю- 1ЦИМИ центр зубчатого колеса 3 с центрами ведущих щесте- рен соседних кинематических цепей.
Поставив значение из выражения (1) в выражение (2), получим соотношение между минимальным значением угла у и параметрами зубчатой передаитл
чи:
. От 1П-Известно, что
2L -
о 1П--- ,
2aw 2
(3)
da, d,+2m(,-fiy), (4) де d, - делительный диаметр ведущей
шестерни; m - модуль зубчатой передачи от
ведущей шестерни к тихоходно- му зубчатому колесу; h - коэффициент высоты головки
зуба передачи;
X, - коэффициент смещения исходного контура ведущей шестерни; и У - коэффициент уравнительного
смещения,35
d, x-iiJ cos
(5)
/5
Z, - число зубьев ведущей шестерни;
- угол профиля зубчатого за- 40 цегшения передачи (для прямозубой передачи 0), ЛУ х -у, (6) де х - коэффициент суммы смещений
ведущей шестерни тихоходного 45 колеса;
У - коэффициент воспринимаемого смещения,
Х2-. X, ч- хз, (7) де х - коэффициент смещения исход- 50 ного контура тихоходного зубчатого колеса,
т
(8)
где а - делительное межцентровое рас стояние.
()m 2 cosp
(9)
15869Я8
д
где z - число зубьев тихоходного
зубчатого колеса.
Подставив последовательно значения параметров из соотношений (4)-(9) в соотношение (3) и осуществив преоб- paзoвa шя, в конечном итоге получают соотношение между минимальным значением угла у и геометрическими параметрами зубчатой передачи в виде
J5
20
-
35
40
45
50
55
m
aw
z у
до /,а Wл, V
jf,;, 2 arcsin --( -----).
m 2coS|3
Корпус 1 редуктора может быть выполнен из общего картера 28 и ряда крышек, например, 29-31, обеспечивающих создание объема, изолирующего зубчатые передачи от окружающей среды (фиг.1 и фиг.5), Наиболее целесообразным конструктивным решением, обеспечивающим рациональный вес и габариты привода в зависимости от требуемой высоты подъема (фиг.6), является вы- папненпе корпуса 1 редуктора из отдельных блоков корпусных деталей,по числу кинематических цепей. Для взаимного сопряжения корпуса редукторов снабжены фланцами. При этом в одном из блоков , являющимся базовым и состоящим из корпуса 32 и крьш1ки 33, расположено тихоходнее зубчатое колесо 3 с одной из кинематических цепей, а другой блок 34 со своей кинематической цепью закреплен на базовом блоке с ъемно.
Привод работает следующим образом. Электродвигатели 17 и 19, вращаясь независимо, приводят во вращение кинематические цепи 8 и 9. Поскольку все независимые кинематические цепи имеют жесткую кинематическую связь через тихоходное зубчатое колесо 3, расположенное на Г лавном валу 2, то вращение их осуществляется с одинаковой частотой, и мощности, развиваемые двиг ателями, равны (незначительная разница в потоках мощности, вызванная индивидуальными потерями в каждой кинематической цепи, может в расчет не приниматься).
Таким образом, по каждой кинематической цепи к тихоходному зубчатому колесу 3 подводится мощность, соответствующая мощности двигателя каждой кинематической цепи. Суммирование мощности осуществляется непосредственно на тихоходном колесе 3. Суммирование мощности осуществляется при постоянной удельной мощности на зуб- чатом венце тихоходного колеса 3.
Каждая из ведущих шестерен 4 и 5, являющихся последним элементом соответствующей кинематической цепи 8 и 9, сцепляется с разными зубьями тихоходного зубчатого колеса. Таким образом, за один оборот колеса каждый его зуб испытьшает число 1.шклов нагружений, соответствующее числу связанньк с ним .ведущих шестерен.
Таким образом, общий вращающийся ;момент на главном валу обеспечивает высоту подъема, равную сумме расчет- :ных высот подъема каждой кинематичес- кой цепи. Формула изобретения
1. Привод эскалатора, содержащий закрепленные на главном валу тяговые звездочки и тихоходное зубчатое колесо, находящееся в зацеплении по край;ней мере с двумя ведущими шестернями приводных редукторов, выполненных с параллельными валами, отличающийся тем, что, с целью снижения его габаритов, оси редукторов расположены в плоскостях, пересекающихся по оси вращения тихоходного :зубчатого колеса, а угол между плоскостями определен выражением
0
5
0
5
Y
где
2 arcsin
(h - aw «
V 4. 2 m 2COS/3
- угол между осями редукторов} m - модуль зацепления ведущих
шестерен с тихоходным зубчатым колесом; а -- межцентровое расстояние между
ведущими шестернями и тихо- ходным зубчатым колесом; h - коэффит иент высоты головки
зуба;
х - коэффициент смещения исходного контура тихоходного зубчатого колеса;
z - число зубьев тихоходного зубчатого колеса;
В - угол профиля зубчатого зацепления ведущих шестерен с тихоходным зубчатым колесом.
2.Привод ПОП.1, отличающийся тем, ч то он снабжен выполненными на корпусе обоих редукторов фланцами для их взаимного сопряжения.
3.Привод по п.2, отличающий с я тем, что корпус одного из редукторов выполнен базовым, а тихоходное зубчатое колесо расположено
в корпусе этого редуктора.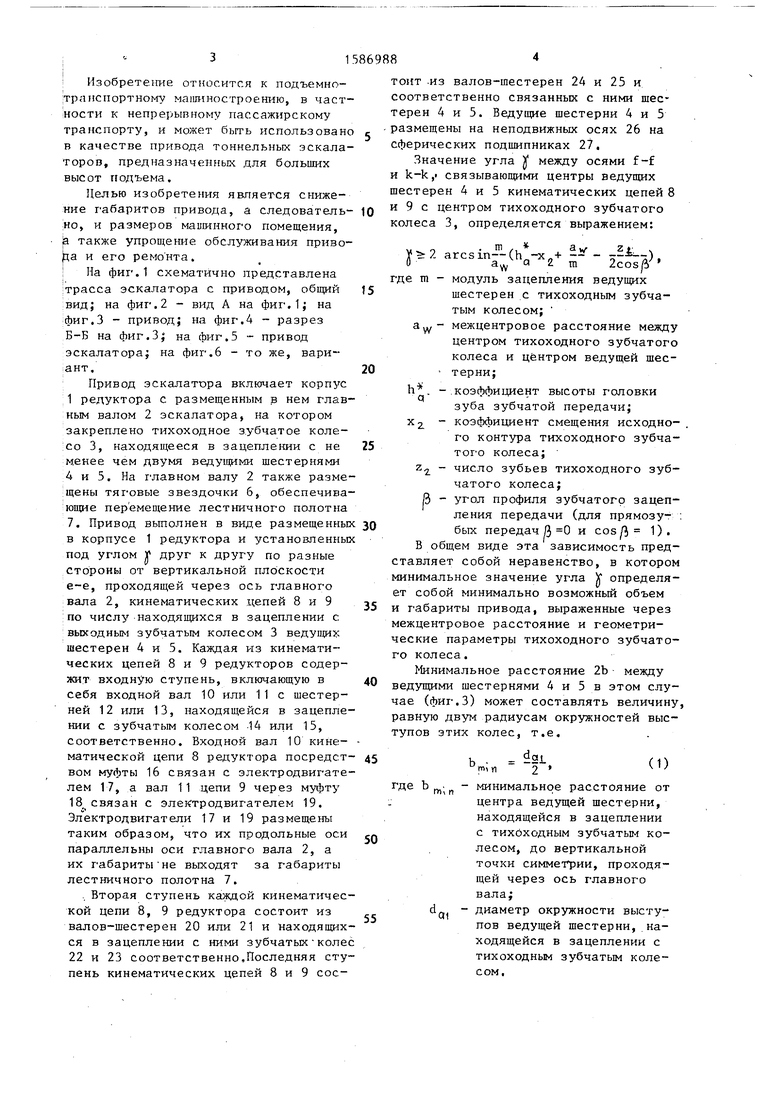
| название | год | авторы | номер документа |
|---|---|---|---|
| Редуктор планетарный с промежуточным сателлитом | 2019 |
|
RU2742202C1 |
| МНОГОПОТОЧНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1992 |
|
RU2027090C1 |
| Приводное устройство эскалатора | 1982 |
|
SU1089029A1 |
| ГИТАРА СМЕННЫХ ШЕСТЕРЕН | 1992 |
|
RU2044202C1 |
| МНОГОПОТОЧНЫЙ ГЛАВНЫЙ РЕДУКТОР ВЕРТОЛЕТА (ВАРИАНТЫ) | 2017 |
|
RU2662382C1 |
| ПОВОРОТНЫЙ МЕХАНИЗМ БАШНИ | 2014 |
|
RU2547669C1 |
| Межвалковый механизм двухвальцевой мельницы | 1979 |
|
SU854432A1 |
| Привод вертикальной роликовой мельницы | 1983 |
|
SU1135490A1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| Стенд для испытания редукторов с коаксиальными валами | 1985 |
|
SU1328703A2 |
Изобретение относится к подъемно-транспортному машиностроению, в частности, к непрерывному пассажирскому транспорту, и может быть использовано в качестве привода тоннельного эскалатора, предназначенного для больших высот подъема. Цель изобретения - снижение габаритов привода. Привод эскалатора включает корпус 1 редуктора с размещенным в нем главным валом 2, на котором закреплено тихоходное зубчатое колесо 3, находящееся в зацеплении с не менее чем двумя ведущими шестернями 4 и 5. На главном валу 2 также размещены тяговые звездочки 6, обеспечивающие перемещение лестничного полотна. Привод выполнен в виде размещенных в корпусе 1 и установленных под углом друг к другу по разные стороны от вертикальной плоскости, проходящей черезь ось главного вала 2, кинематических цепей и по числу находящихся в зацеплении с тихоходным зубчатым колесом 3 ведущих шестерен 4 и 5. Значение угла между осями, связывающими центры ведущих шестерен 4 и 5 кинематических цепей с центром тихоходного зубчатого колеса 3, выбрано не меньше определенного соотношения, зависящего от параметров зубчатых передач редуктора. Электродвигатели 17 и 19, вращаясь независимо, приводят во вращение кинематические цепи редуктора. Суммирование мощности осуществляется непосредственно на тихоходном колесе. 2 з.п. ф-лы, 6 ил.
и
Фиг. 2
30
yj
29
33
3
