(Л
с
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДОПУСКОВОГО КОНТРОЛЯ ПАРАМЕТРОВ РАДИОСИГНАЛА ВЕЩАТЕЛЬНОГО ТЕЛЕВИДЕНИЯ | 1989 |
|
RU2019062C1 |
| ДИАГНОСТИЧЕСКИЙ ВИБРОМЕТР | 1991 |
|
RU2029252C1 |
| Устройство для диагностирования зубчатых передач | 1983 |
|
SU1232887A1 |
| Устройство проверки хода часовых механизмов | 1986 |
|
SU1392542A1 |
| Устройство для диагностирования двигателя внутреннего сгорания | 1982 |
|
SU1048352A1 |
| СПОСОБ ВИБРОДИАГНОСТИКИ ДВУХВАЛЬНОГО ГАЗОТУРБИННОГО ДВИТАТЕЛЯ | 2013 |
|
RU2514461C1 |
| Устройство для диагностики машин | 1985 |
|
SU1739245A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208771C2 |
| УСТРОЙСТВО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2526500C1 |
| Прецизионное сканирующее устройство | 1989 |
|
SU1714564A1 |

Изобретение относится к машиностроению и может быть использовано для оценки технического состояния механизмов линейного перемещения манипуляторов. Целью изобретения является повышение достоверности и увеличение глубины диагностирования. Для этого устройство содержит установленные на одной из опор качения ползуна манипулятора вибропреобразователь и датчик частоты вращения, а также датчики углового положения и момента, связанные с валом двигателя ползуна манипулятора. Вибропреобразователь и датчики соответствующим образом связаны с блоком преобразования и памяти и с блоком обработки и управления, которые также связаны между собой непосредственно и через управляемый анализатор спектра. По сигналам датчиков и вибропреобразователя устройство определяет различные дефекты подшипниковых опор механизма перемещения манипулятора и осуществляет их диагностику. Соответствующая диагностическая информация выдается из микроЭВМ на блок регистрации. 5 ил.
Изобретение относится к машиностроению и может быть использовано для оценки технического состояния механизмов пи- неиного перемещения манипуляторов
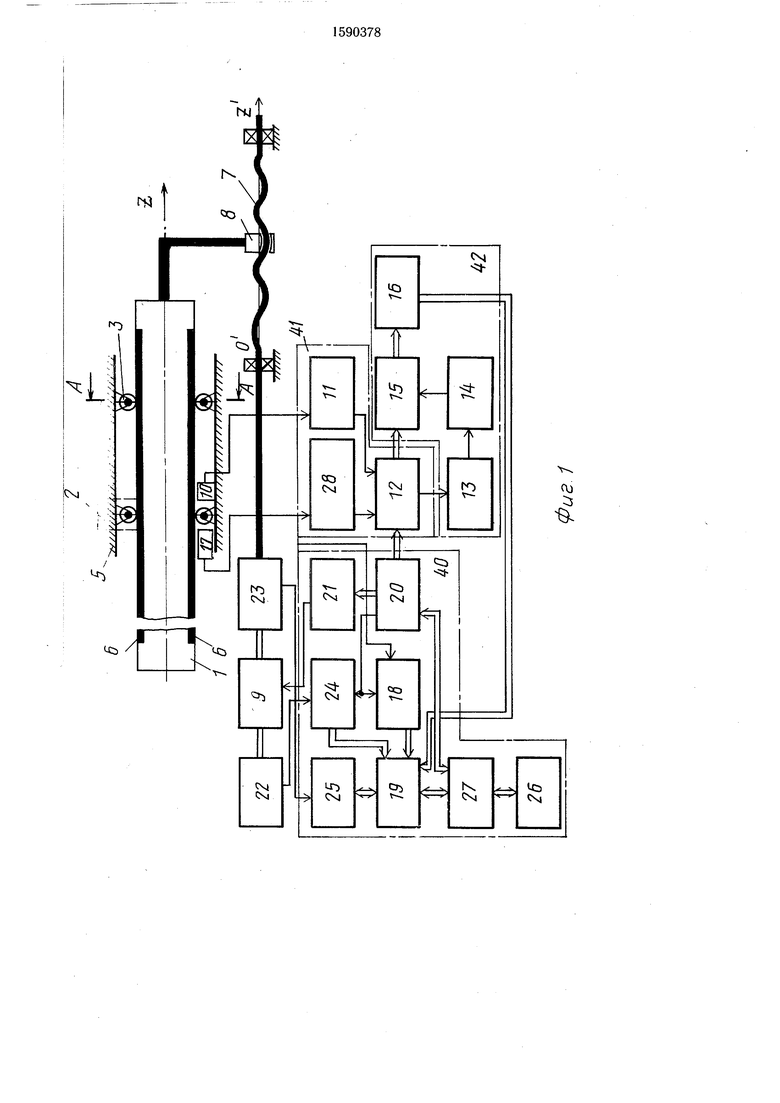
Целью изобретения является повышение ировТя° глубины диагносНа фиг. 1 представлена структурная схема устройства; на фиг. 2 - разрез А-А на фиг. 1; па фиг. 3 - схема датчика частоты вращения; на фиг. 4 - схема блока ввода информации; на фиг 5 - схема блока вывода информации
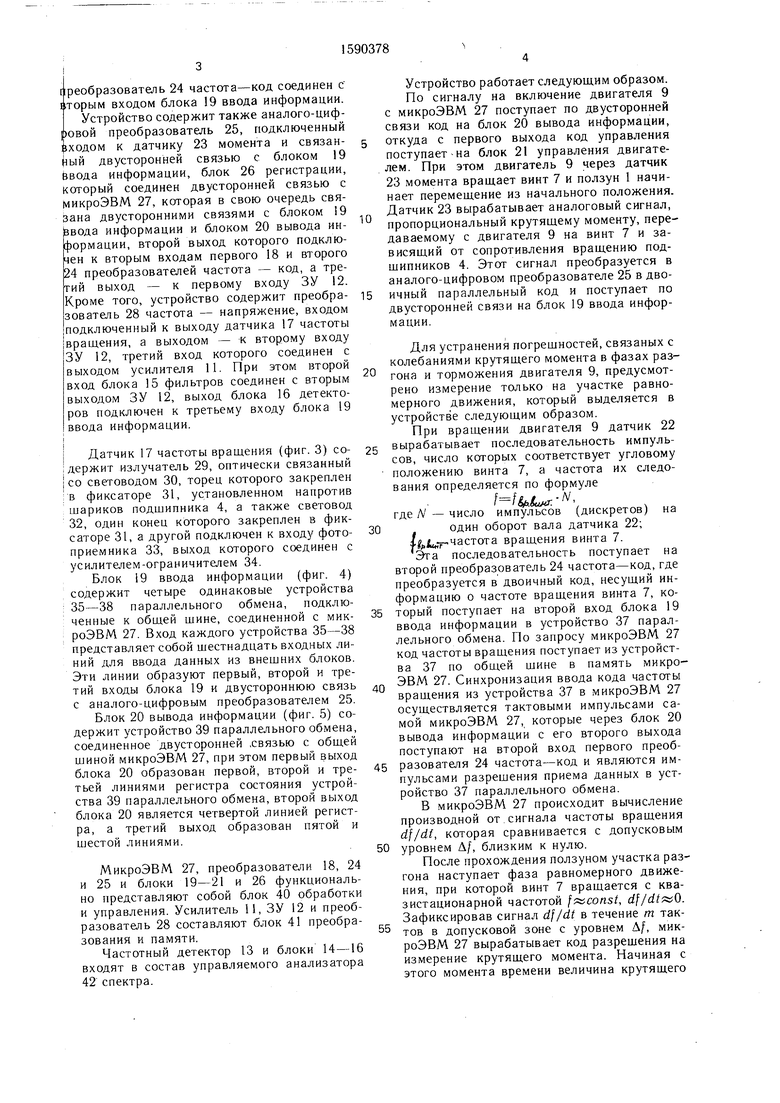
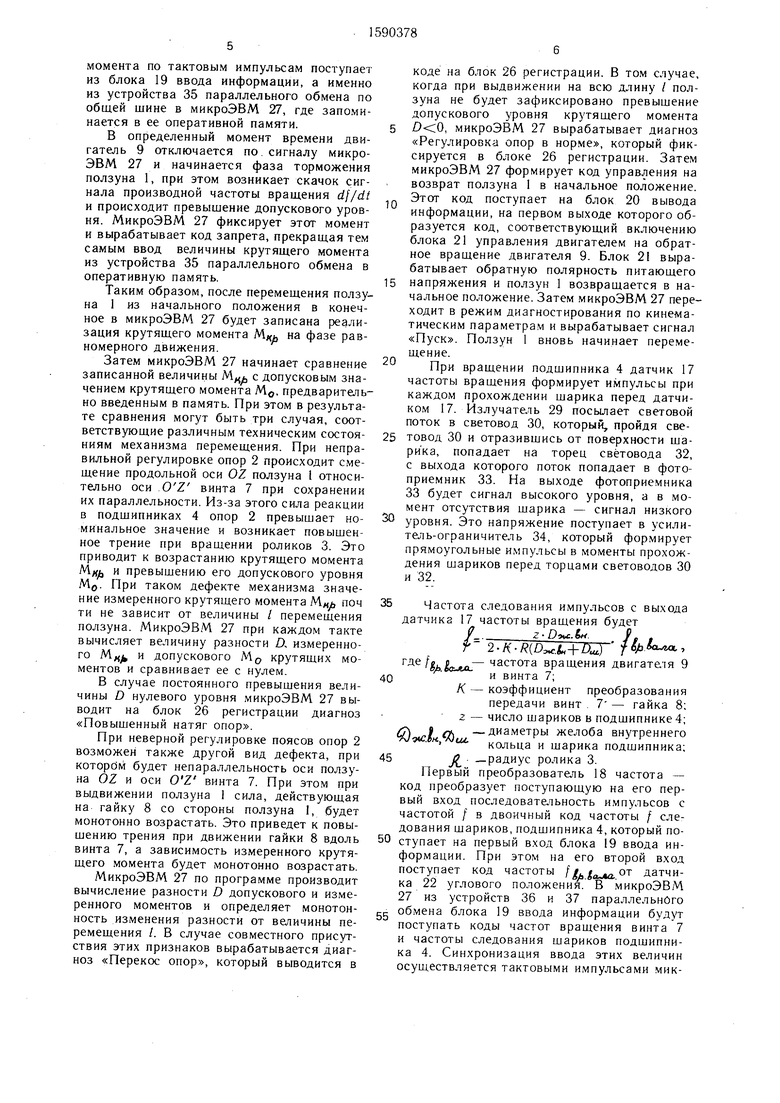
оовянТ ° предназначено для диагностирования механизма линейного перемещения манипулятора (фиг. 1), состоящего из на 1, установленного на двух поясах опор 2 включающих ролик 3, закрепленный в под ГИРЯ ,е кольца которых соединены с основанием 5. Ролики 3 контактируют с дорожками 6 качения ползуна I кинематически связанного через передачу
. « -Устройство для диагностирования механизма линейного перемещения манипулятора (фиг. 1) содержит последовательно соединенные вибропреобразователь 10. установ1ен- ныи на одном из подшипников 4 опоры 2 и усилитель 11. последовательно сое-ц неш ьГе запоминающее устройство (ЗУ) 19 аётот ньш детектор 13. блок 14 перестройки частот, блок 15 фильтров и б.юк 16 детекторов последовательно соединенные датчик 17 час тоты вращения, оптически связанный с тем же подшипником 4 опоры 2. первый преобразователь 18 частота - код и блок ввода информации, последовательно соединенные блок 20 вывода информации и б.ок cieSeT двигателем, выход которого соединен с двигателем 9, вал которого связан с датчиком 22 углового положения и через датчик 23 момента с винтом 7 Вы ход датчика 22 положения через второй
ел
;о о со
vj
00
реобразователь 24 частота-код соединен с (торым входом блока 19 ввода информации. Устройство содержит также аналого-цифровой преобразователь 25, подключенный (ХОДОМ к датчику 23 момента и связан йый двусторонней связью с блоком 19 (звода информации, блок 26 регистрации, который соединен двусторонней связью с микроэвм 27, ксггорая в свою очередь свя зана двусторонними связями с блоком 9 вода информации и блоком 20 вывода информации, второй выход которого подключен к вторым входам первого 18 и второго 24 преобразователей частота - код, а третий выход - к первому входу ЗУ 12. Кроме того, устройство содержит преобразователь 28 частота - напряжение, входом 1подключенный к выходу датчика 17 частоты вращения, а выходом - к второму входу 13У 12 третий вход которого соединен с выходо м усилителя 11. При этом второй вход блока 15 фильтров соединен с вторым выходам ЗУ 12, выход блока 16 детектр ров подключен к третьему входу блока 1У ввода информации.
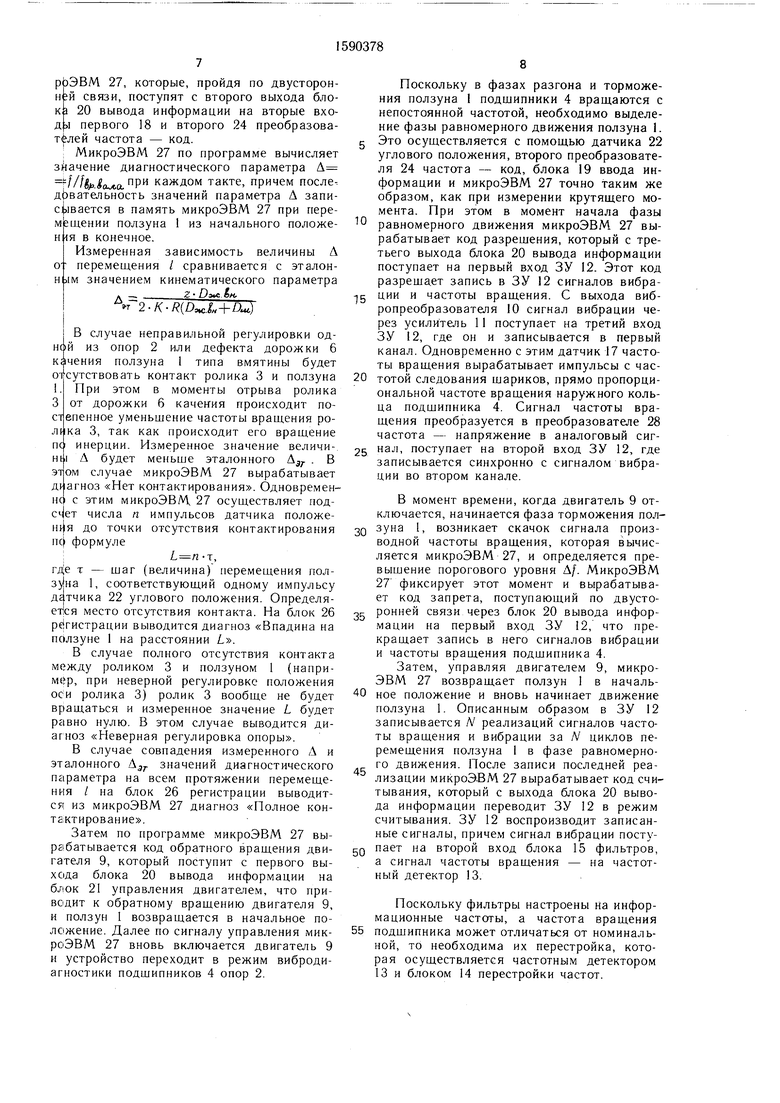
I Датчик 17 частоты вращения (фиг. 3) со- держит излучатель 29, оптически связанный I со свеговодом 30, торец которого закреплен в фиксаторе 31, установленном напротив : шариков подшипника 4, а также световод 32, один конец которого закреплен в фик- сатор е 31, а другой подключен к входу фотоприемника 33, выход которого соединен с усилителем-ограничителем 34.
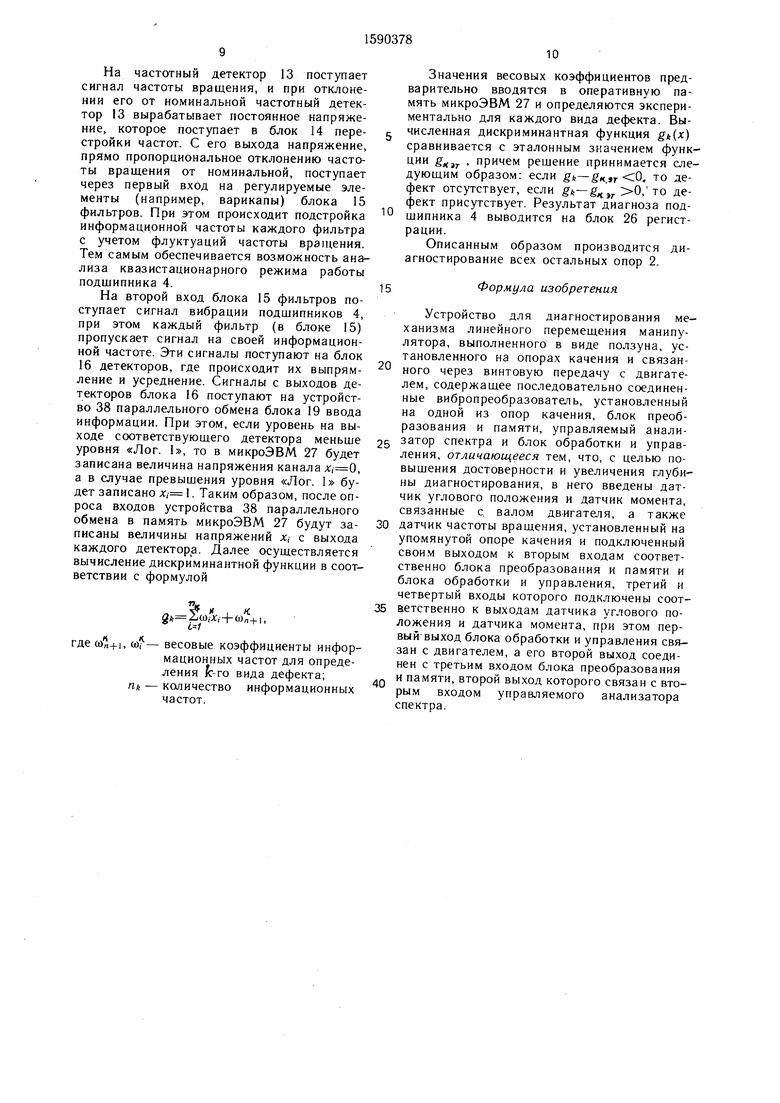
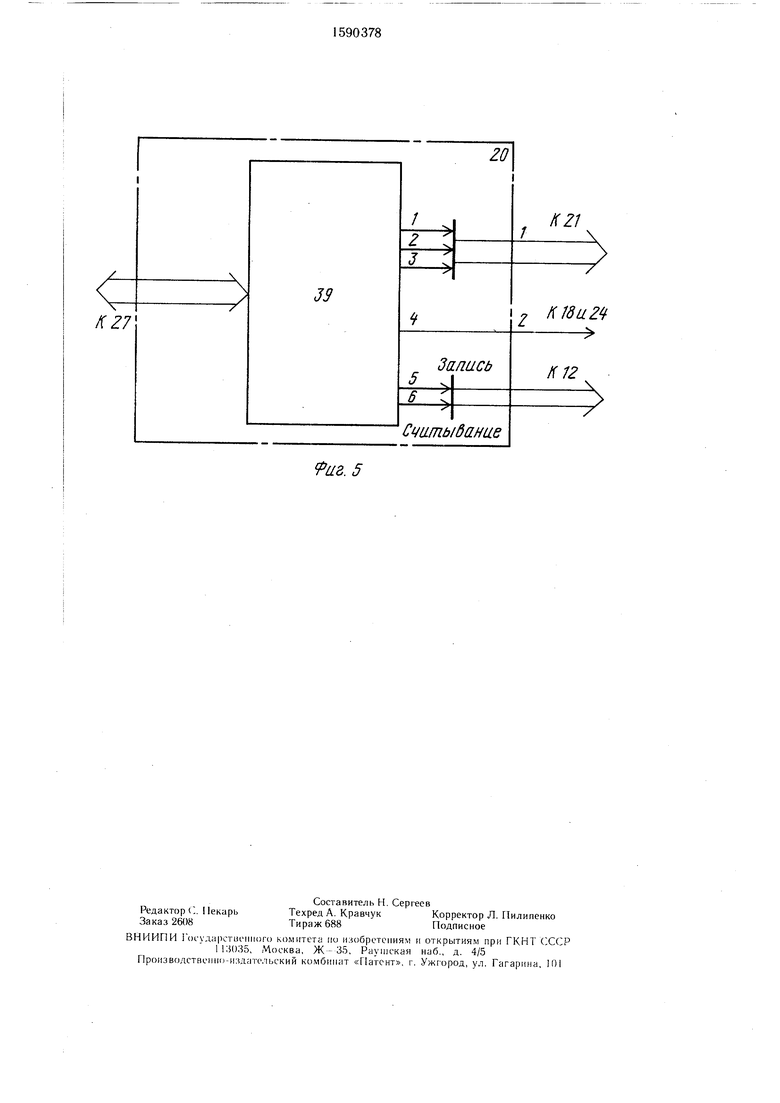
Блок 19 ввода информации (фиг. 4) содержит четыре одинаковые устройства 35-38 параллельного обмена, подклю- ченные к общей шине, соединенной с мик- роЭВМ 27. Вход каждого устройства 35-38 представляет собой шестнадцать входных линий для ввода данных из внешних блоков. Эти линии образуют первый, второй и третий входы блока 19 и двустороннюю связь с аналого-цифровым преобразователем 25. Блок 20 вывода информации (фиг. 5) содержит устройство 39 параллельного обмена, соединенное двусторонней .связью с общей шиной микроэвм 27, при этом первый выход блока 20 образован первой, второй и третьей линиями регистра состояния устройства 39 параллельного обмена, второй выход блока 20 является четвертой линией регистра, а третий выход образован пятой и шестой линиями.
Микроэвм 27, преобразователи 18, 24 и 25 и блоки 19-21 и 26 функционально представляют собой блок 40 обработки и управления. Усилитель И, ЗУ 12 и преобразователь 28 составляют блок 41 преобразования и памяти.
Частотный детектор 13 и блоки 14-1Ь входят в состав управляемого анализатора 42 спектра.
Устройство работает следующим образом.
По сигналу на включение двигателя 9
с микроэвм 27 поступает по двусторонней
связи код на блок 20 вывода информации,
5 откуда с первого выхода код управления поступает-на блок 21 управления двигателем. При этом двигатель 9 через датчик 23 момента вращает винт 7 и ползун 1 начинает перемещение из начального положения. Датчик 23 вырабатывает аналоговый сигнал,
° пропорциональный крутящему моменту, передаваемому с двигателя 9 на винт 7 и зависящий от сопротивления вращению подшипников 4. Этот сигнал преобразуется в аналого-цифровом преобразователе 25 в дво15 ичный параллельный код и поступает по двусторонней связи на блок 19 ввода информации.
Для устранения погрещностей, связаных с колебаниями крутящего момента в фазах раз- 20 гона и торможения двигателя 9, предусмотрено измерение только на участке равномерного движения, который выделяется в устройстве следующим образом.
При вращении двигателя 9 датчик 22 вырабатывает последовательность импуль- сов число которых соответствует угловому положению винта 7, а частота их следования определяется по формуле
РдеД/ число импульсов (дискретов) на 3Qодин оборот вала датчика 22;
ig .,частота вращения винта 7. последовательность поступает на второй преобразователь 24 частота-код, где преобразуется в двоичный код, несущий информацию о частоте вращения винта 7, ко- 35 торый поступает на второй вход блока 19 ввода информации в устройство 37 парал лельного обмена. По запросу микроЭВМ 27 код частоты вращения поступает из устройства 37 по общей шине в память микро- ЭВМ 27. Синхронизация ввода кода частоты вращения из устройства 37 в микроЭВМ 27 осуществляется тактовыми импульсами самой микроэвм 27, которые через блок 20 вывода информации с его второго выхода поступают на второй вход первого преоб- 45 разователя 24 частота-код и являются импульсами разрешения приема данных в устройство 37 параллельного обмена.
В микроэвм 27 происходит вычисление производной от сигнала частоты вращения df/di, которая сравнивается с допусковым 50 уровнем Л/, близким к нулю.
После прохождения ползуном участка разгона наступает фаза равномерного движения, при которой винт 7 вращается с квазистационарной частотой f const, df/dt O. Зафиксировав сигнал df/dt в течение т так- 55 тов в допусковой зоне с уровнем Af, мик- роЭВМ 27 вырабатывает код разрешения на измерение крутящего момента. Начиная с этого момента времени величина крутящего
момента по тактовым импульсам поступает из блока 19 ввода информации, а именно из устройства 35 параллельного обмена по общей шине в микроЭВМ 27, где запоминается в ее оперативной памяти.
В определенный момент времени двигатель 9 отключается по. сигналу микро- ЭВМ 27 и начинается фаза торможения ползуна 1, при этом возникает скачок сигнала производной частоты вращения dj/dt и происходит превыщение допускового уровня. Микроэвм 27 фиксирует этот момент и вырабатывает код запрета, прекращая тем самым ввод величины крутящего момента из устройства 35 параллельного обмена в оперативную память.
Таким образом, после перемещения ползуна 1 из начального положения в конечное в микроэвм 27 будет записана реализация крутящего момента М,, на фазе равномерного движения.
Затем микроэвм 27 начинает сравнение записанной величины М,, с допусковым значением крутящего момента MQ. предварительно введенным в память. При этом в результате сравнения могут быть три случая, соответствующие различным техническим состояниям механизма перемещения. При неправильной регулировке опор 2 происходит смещение продольной оси OZ ползуна 1 относительно оси O Z винта 7 при сохранении их параллельности. Из-за этого сила реакции в подщипниках 4 опор 2 превышает номинальное значение и возникает повышенное трение при вращении роликов 3. Это приводит к возрастанию крутящего момента и превышению его допускового уровня MQ. При таком дефекте механизма значение измеренного крутящего момента поч ти не зависит от величины / перемещения ползуна. Микроэвм 27 при каждом такте вычисляет величину разности Я измеренного М. и допускового М крутящих моментов и сравнивает ее с нулем.
В случае постоянного превышения величины D нулевого уровня микроЭВМ 27 выводит на блок 26 регистрации диагноз «Повышенный натяг опор.
При неверной регулировке поясов опор 2 возможен также другой вид дефекта, при котором будет непараллельность оси ползуна OZ и оси O Z винта 7. При этом при выдвижении ползуна 1 сила, действующая на гайку 8 со стороны ползуна 1, будет монотонно возрастать. Это приведет к повышению трения при движении гайки 8 вдоль винта 7, а зависимость измеренного крутящего момента будет монотонно возрастать. Микроэвм 27 по программе производит вычисление разности D допускового и измеренного моментов и определяет монотонность изменения разности от величины перемещения /. В случае совместного присутствия этих признаков вырабатывается диагноз «Перекос опор, который выводится в
10
коде на блок 26 регистрации. В том случае, когда при выдвижении на всю длину / ползуна не будет зафиксировано превышение допускового уровня крутящего момента 5 , микроэвм 27 вырабатывает диагноз «Регулировка опор в норме, который фиксируется в блоке 26 регистрации. Затем микроэвм 27 формирует код управления на возврат ползуна I в начальное положение. Этот код поступает на блок 20 вывода информации, на первом выходе которого образуется код, соответствующий включению блока 21 управления двигателем на обратное вращение двигателя 9. Блок 21 вырабатывает обратную полярность питающего 15 напряжения и ползун 1 возвращается в начальное положение. Затем микроЭВМ 27 переходит в режим диагностирования по кинематическим параметрам и вырабатывает сигнал «Пуск. Ползун 1 вновь начинает переме- 2 щение.
При вращении подшипника 4 датчик 17 частоты вращения формирует импульсы при каждом прохождении шарика перед датчиком 17. Излучатель 29 посылает световой поток в световод 30, который, пройдя све- 25 товод 30 и отразившись от поверхности ша- ри ка, попадает на торец световода 32, с выхода которого поток попадает в фотоприемник 33. На выходе фотоприемника 33 будет сигнал высокого уровня, а в мо- мент отсутствия шарика - сигнал низкого 0 уровня. Это напряжение поступает в усилитель-ограничитель 34, который формирует прямоугольные импульсы в моменты прохождения шариков перед торцами световодов 30 и 32.
5 Частота следования импульсов с выхода датчика 17 частоты вращения будет
f.z.D.iH.9. .
Г 2./.A (D.i,+/)«,) /«A«a, частота вращения двигателя 9 0ч винта 7;
К, - коэффициент преобразования
передачи винт. 7- гайка 8:
2 - число шариков в подщипнике 4;
-диаметры желоба внутреннего
кольца и шарика подшипника;
5j . -радиус ролика 3.
Первый преобразователь 18 частота - код преобразует поступающую на его первый вход последовательность импульсов с частотой / в двоичный код частоты / следования шариков, подшипника 4, который по- 0 ступает на первый вход блока 19 ввода информации. При этом на его второй вход поступает код частоты / f,, ..да. от датчика 22 углового положения. В микроЭВМ 27 из устройств 36 и 37 параллельного g обмена блока 19 ввода информации будут поступать коды частот вращения винт а 7 и частоты следования шариков подшипника 4. Синхронизация ввода этих величин осуществляется тактовыми импульсами микр|эЭВМ 27, которые, пройдя по двусторонней связи, поступят с второго выхода бло- кз 20 вывода информации на вторые вхо- Дз1 первого 18 и второго 24 преобразователей частота - код.
; Микроэвм 27 по программе вычисляет зйачение диагностического параметра Л ///,.. Р каждом такте, причем после. дЬвательность значений параметра Л запи- с| 1вается в память микроЭВМ 27 при перемещении ползуна 1 из начального положе- н 1я в конечное.
Измеренная зависимость величины Д О перемещения / сравнивается с эталон- н 1м значением кинематического параметра
А
Z- РмлЛн,
т 2./(-/(D«c.)
I
I В случае неправильной регулировки одной из опор 2 или дефекта дорожки 6 качения ползуна 1 типа вмятины будет отсутствовать контакт ролика 3 и ползуна При этом в моменты отрыва ролика от дорожки 6 каченгия происходит по- c eпeннoe уменьшение частоты вращения ролика 3, так как происходит его вращение по инерции. Измеренное значение величи-, ны А будет меньще эталонного А,. . В этом случае микроЭВМ 27 вырабатывает д агноз «Нет контактирования. Одновременна с этим микроэвм 27 осуществляет под- cijeT числа п импульсов датчика положе- до точки отсутствия контактирования п6 формуле
,
где т - шаг (величина) перемещения пол- 1, соответствующий одному импульсу датчика 22 углового положения. Определя- ет1ся место отсутствия контакта. На блок 26 регистрации выводится диагноз «Впадина на ползуне 1 на расстоянии L.
В случае полного отсутств ия контакта между роликом 3 и ползуном 1 (например, при неверной регулировке положения оси ролика 3) ролик 3 вообще не будет вращаться и измеренное значение L будет равно нулю. В этом случае выводится диагноз «Неверная регулировка опоры.
В случае совпадения измеренного А и эталонного А значений диагностического параметра на всем протяжении перемещения / на блок 26 регистрации выводится из микроэвм 27 диагноз «Полное кон- тс Ктирование.
Затем по программе микроЭВМ 27 вырабатывается код обратного вращения двигателя 9, который поступит с первого выхода блока 20 вывода информации на б/iOK 21 управления двигателем, что приводит к обратному вращению двигателя 9, и ползун I возвращается в начальное положение. Далее но сигналу управления микроЭВМ 27 вновь включается двигатель 9 и устройство переходит в режим вибродиагностики подщипников 4 опор 2.
Поскольку в фазах разгона и торможения ползуна 1 подшипники 4 вращаются с непостоянной частотой, необходимо выделение фазы равномерного движения ползуна 1. g Это осуществляется с помощью датчика 22 углового положения, второго преобразователя 24 частота - код, блока 19 ввода информации и микроэвм 27 точно таким же образом, как при измерении крутящего момента. При этом в момент начала фазы
- равномерного движения микроЭВМ 27 вырабатывает код разрещения, который с третьего выхода блока 20 вывода информации поступает на первый вход ЗУ 12. Этот код разрешает запись в ЗУ 12 сигналов вибра5 ции и частоты вращения. С выхода вибропреобразователя 10 сигнал вибрации через усилитель 11 поступает на третий вход ЗУ 12, где он и записывается в первый канал. Одновременно с этим датчик 17 частоты вращения вырабатывает импульсы с час0 тотой следования шариков, прямо пропорциональной частоте вращения наружного кольца подшипника 4. Сигнал частоты вращения преобразуется в преобразователе 28 частота - напряжение в аналоговый сиг5 нал, поступает на второй вход ЗУ 12, где записывается синхронно с сигналом вибрации во втором канале.
В момент времени, когда двигатель 9 отключается, начинается фаза торможения пол0 зуна 1, возникает скачок сигнала производной частоты вращения, которая вычисляется микроэвм 27, и определяется пре- выщение порогового уровня А/. МикроЭВМ 27 фиксирует этот момент и вырабатывает код запрета, поступающий по двустоg ронней связи через блок 20 вывода информации на первый вход ЗУ 12, что прекращает запись в него сигналов вибрации и частоты вращения подщипника 4.
Затем, управляя двигате тем 9, микро- ЭВМ 27 возвращает ползун 1 в началь0 ное положение и вновь начинает движение ползуна 1. Описанным образом в ЗУ 12 записывается N реализаций сигналов частоты вращения и вибрации за yV циклов перемещения ползуна 1 в фазе равномерного движения. После записи последней реализации микроэвм 27 вырабатывает код считывания, который с выхода блока 20 вывода информации переводит ЗУ 12 в режим считывания. ЗУ 12 воспроизводит записанные сигналы, причем сигнал вибрации постуQ пает на второй вход блока 15 фильтров, а сигнал частоты вращения - на частотный детектор 13.
Поскольку фильтры настроены на информационные частоты, а частота вращения 5 подщипника может отличаться от номинальной, то необходима их перестройка, которая осуществляется частотным детектором 13 и блоком 14 перестройки частот.
5
На частотный детектор 13 поступает сигнал частоты вращения, и при отклонении его от номинальной частотный детектор 13 вырабатывает постоянное напряжение, которое поступает в блок 14 пере- с стройки частот. С его выхода напряжение, прямо пропорциональное отклонению частоты вращения от номинальной, поступает через первый вход на регулируемые элементы (например, варикапы) блока 15 фильтров. При этом происходит подстройка информационной частоты каждого фильтра с учетом флуктуации частоты вращения. Тем самым обеспечивается возможность анализа квазистационарного режима работы подщипника 4.,с
На второй вход блока 15 фильтров поступает сигнал вибрации подщипников 4, при этом каждый фильтр (в блоке 15) пропускает сигнал на своей информационной частоте. Эти сигналы поступают на блок 16 детекторов, где происходит их выпрям- 2- ление и усреднение. Сигналы с выходов детекторов блока 16 поступают на устройство 38 параллельного обмена блока 19 ввода информации. При этом, если уровень на выЗначения весовых коэффициентов пред варительно вводятся в оперативную па мять микроэвм 27 и определяются экспери ментально для каждого вида дефекта. Вы численная дискриминантная функция g,,(x) сравнивается с эталонным значением фун ёкзт причем рещение принимается сл дующим образом: если ,. то де фект отсутствует, если 0, то де фект присутствует. Результат диагноза под щипника 4 выводится на блок 26 регист рации.
Описанным образом производится ди агностирование всех остальных опор 2.
Формула изобретения
Устройство для диагностирования ме ханизма линейного перемещения манипулятора, выполненного в виде ползуна, установленного на опорах качения и связанного через винтовую передачу с двигателем, содержащее последовательно соединенные вибропреобразователь, установленный на одной из опор качения, блок преобразования и памяти, управляемый анали,,- 1 1чл1Г1,11ысл о,л anaJJrlходе соответствующего детектора меньще 25 затор спектра и блок обработки и упоавУООВНЯ «.Лог тп п «чит пллСЛПМ 0-7 и . pat uirxn и yiiydu
уровня «Лог. 1, ТО В микроэвм 27 будет записана величина напряжения канала л:,0, а в случае превыщения уровня «Лог. 1 бу- дет записано Xi 1. Таким образом, после опроса входов устройства 38 параллельного
ления, отличающееся тем, что, с целью по- выщения достоверности и увеличения глуби ны диагностирования, в него введены датчик углового положения и датчик момента, связанные с валом двигателя, а также
-./I - « ««ii/iv-«iijjj4yt V Liyi jcinn он. DdJiuM дь-игателя а также
пигячм микроэвм 27 будут за- 30 датчик частоты вращения, установленный на
ГТИГЯНЫ ПРПНиЫи UT иапгла vi -лиIIД „„....«
писаны величины напряжений л:, с выхода каждого детектора. Далее осуществляется вычисление дискриминантной функции в соответствии с формулой
упомянутой опоре качения и подключенный своим выходом к вторым входам соответственно блока преобразования и памяти и блока об работки и управления, третий и четвертый входы которого подключены соот
L(uiXi
+ Шл+1,
весовые коэффициенты информационных частот для определения к-го вида дефекта; количество информационных частот.
Значения весовых коэффициентов предварительно вводятся в оперативную память микроэвм 27 и определяются экспериментально для каждого вида дефекта. Вычисленная дискриминантная функция g,,(x) сравнивается с эталонным значением функ- ёкзт причем рещение принимается следующим образом: если ,. то дефект отсутствует, если 0, то дефект присутствует. Результат диагноза подщипника 4 выводится на блок 26 регистрации.
Описанным образом производится диагностирование всех остальных опор 2.
Формула изобретения
Устройство для диагностирования механизма линейного перемещения манипулятора, выполненного в виде ползуна, установленного на опорах качения и связанного через винтовую передачу с двигателем, содержащее последовательно соединенные вибропреобразователь, установленный на одной из опор качения, блок преобразования и памяти, управляемый анали 1 1чл1Г1,11ысл о,л anaJJrlзатор спектра и блок обработки и упоавзатор спектра и блок обработки и упоав . pat uirxn и yiiydu
ления, отличающееся тем, что, с целью по- выщения достоверности и увеличения глубины диагностирования, в него введены датчик углового положения и датчик момента, связанные с валом двигателя, а также
Liyi jcinn он. DdJiuM дь-игателя а также
датчик частоты вращения, установленный на
30 датчик частоты вращения, установленный на
«
упомянутой опоре качения и подключенный своим выходом к вторым входам соответственно блока преобразования и памяти и блока об работки и управления, третий и четвертый входы которого подключены соот5 аетственно к выходам датчика углового положения и датчика момента, при этом первый выход блока обработки и управления связан с двигателем, а его второй выход соединен с третьим входом блока преобразования
Q и памяти, второй выход которого связан с вторым входом управляемого анализатора спектра.
hj
i
Y
filZ. J
К ана/1ого - u,uippo6ofiu прео8разо5ат5,Ю 25
ОШ
v/уГ пакроЭВ 27
13
faz. у
аг.5
