мирователе закона сканирования 18, подключается к микроэвм 16, которая осуществляет управление движением зеркала 1, а к микроэвм 19 подключается второе ОЗУ формирователя закона сканирования 18, в которое вводятся рассчитываемые коды для
следующего фрагмента траектории. И так далее. По мере отработки одного фрагмента ОЗУ переключаются, в итоге микроЭВМ 19 рассчитывает коды для траектории движения, а микроэвм 16 осуществляет отработку, 7 ил.


| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| Устройство для отображения графической информации на экране цветного телевизионного индикатора | 1990 |
|
SU1836719A3 |
| Дисплейный процессор | 1981 |
|
SU1292031A1 |
| Устройство для считывания графической информации | 1986 |
|
SU1377882A1 |
| Устройство для отображения информации | 1987 |
|
SU1529279A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1988 |
|
SU1636841A1 |
| Устройство для преобразования сейсморазведочной информации | 1987 |
|
SU1497599A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1981 |
|
SU1275521A1 |
| Устройство для отображения дефектов исследуемого объекта на экране электронно-лучевой трубки /ЭЛТ/ | 1981 |
|
SU1008779A1 |
| Видеоконтроллер | 1990 |
|
SU1816326A3 |
Изобретение относится к оптико-механическим развертывающим устройствам и может использоваться в системах сканирования. Целью изобретения является расширение функциональных возможностейпутем обеспечения сканирования по заданному произвольному закону в пространстве предметов. В начале сеанса от внешнего устройства вводят данные о требуемом законе сканирования и числе циклов развертки. При выражении требуемого закона сканирования в аналитической форме мик- роЭВМ 19 осуществляет расчет кодов, описывающих требуемые координаты визирного луча в пространстве предметов в виде целочисленных значений дискретов интерферометрическога измерителя углового положения сканирующего зеркала t. Указанные расчеты осуществляются г1о- фрагментно для первого участка требуемой .траектории движения. Далее ОЗУ, содержащее указанные коды, размещенное в фор->&4J^li^сл о^ч
Изобретение относится к оптико-механическим развертывающим устройствам и может использоваться в системах сканирования. Известно оптико-механическое сканирующее устройство, содержащее сканирую1дее зеркало, магнитоэлектрический движитель, усилитель мощности, интерферометрический измеритель угловых перемещен й сканирующего зеркала и программное устройство с формирователем сигнала ошмбки. Сканирование зеркалом осуществляется под действием сигналов, вызванных ошибкой рассогласования между сигналом, задаваемым программой движения, и текущим значением сигнала, вырабатываемого интерферомётрическим измерителем угловых перемещений сканирующего зеркала. Недостатком данного устройства является невысокая точность реверса сканирующего зеркала. Наиболее близким техническим решением является развертывак щее устройство, содержащее сканирующее зеркало, магнитоэлектрический движитель, состоящий из жестко связанных со сканирующим зеркалом строчной катушки рабочего хода и катушек реверса строчной развертки, размещенных в зазоре между полюсами магнитных систем, усилитель молдности строчной развертки, выходом подкяючен ный к первому выводу строчной катушки рабочего хода, а входом к первому выходу формирователя сигнала ошибки, формирователь реверса строчной развертки, который вкл:ючает измерительную катушку, пространственно совмещенную с катушкой реверса и первым вь1водом подключенную к входу формирователя реверса строчной развертки, а вторым выводом соединенную с вторым выводом строчной катушки рабочего хода и общей -точкой источника питания, первый выход формирователя реверса строчной развертки соединен с первым выводом катушки реверса, вторым выводом подключенной к общей точке вентилей, включенных, между полюсами источника питания, управляющие входы вентилей прдключены соответственно к первому и второму выходам формирователя начала реверса, измеритель углового положения сканирующего зеркала, первым и вторы,м входа1и и соединенного со сканирующим зеркалом. Недостатком известного устройства является отсутствие функциональных возможностей сканирования по заданному произвольному закону в пространстве предметов. Цель изобретения - расширение функциональных возможностей путем обеспечения сканирования по заданному произвольному закону в пространстве предметов. Поставленная цель достигается тем, что в прецизионное сканирующее устройство, содержащее сканирующее зеркало, магнитоэлектрический движитель, состоящий из жестко связанных со сканирующим зеркалом строчной катушки рабочего хода и катушек реверса строчной развертки, размещенных в зазорах между полюсами магнитных систем, усилитель мощности строчной развертки, выходом подключенный к первому выводу строчной катушки рабочего хода, а входом - к первому выходу формирователя сигнала ошибки, формирователь реверса строчной развертки, который включает измерительную катушку, пространственно совмещенную с катушкой реверса и первым выводом подключенную к входу формирователя реверса строчной развертки, а вторым выводом соединенную с вторым выводом строчной катушки рабочего хода и общей точкой источника питания, первый выход формирователя реверса строчной развертки соединен с первым выводом катушки реверса, вторым выводом подключенный к общей точке вентилей, включенных между полюсами источника питания, управляющие входы вентилей подключены соответственно к первому и второму выходам формирователя начала реверса, измеритель углового положения сканирующего зеркала, первым и вторым входами соединенного со сканирующим
зеркалом, введены кадровая катушка рабочего хода, усилитель мощности кадровой развертки, датчик начального положения, первая .и вторая микроЭВМ, формирователь закона сканирования, первое И второе запоминающие устройства, управляемый генератор частоты, причем кадровая катушка рабочего хода размещена в зазорах между полюсами магнитных систем и первым выводом подключена к выходу ycилиteля мощности кадровой развертки, входом подключенного к второму выходу формирователя сигнала ошибки, внешние шины данных, адреса и управления подключены к соответствующим Ш14нам данных, адреса и управления первой микроЭВМ, первого запоминающего устройства и формирователя закона сканирования, шины данных, адреса и управления второй микроЭВМ подключены соответственно к шинам данных, адреса и управления формирователя начала реверса, измерителя углового положения сканирующего зеркала, формирователя сигнала ошибки, управляемого генератора частоты, второго запоминающего устройства и шине данных формирователя закона сканирования, первый вход первой микроЭВМ подключен к первым входам второй микроЭВМ, формирователя закона сканирования, формирователя начала реверса и выходу управляемого генератора частоты, второй вход первой микроэвм подключен к внешнему входу Пуск, третий, четвертый, пятый и шестой входы первой микроЭВМ соединены соответственно с первым, вторым, третьим и четвертым выходами формирователя закона сканирования, первый выход первой микроэвм подключен к второму входу второй микроэвм и третьему входу датчика начального положения, первый выход которого соединен с третьим входом второй микроэвм, второй выход датчика начального положения соединен с третьим входом измерителя углового положения, первыми входами формирователя сигнала ошибки, управляемого генератора частоты, вторым входом формирователя законз сканирования и четвертым входом второй микроЭВМ, пятым входом соединенной с вторым выходом первой-микроЭВМ, а шестым -т с вторым входом формирователя сигнала ошибки и вторым выходом формирователя реверса строчной развертки, седьмой вход второй микроэвм подключен к пятому выходу формирователя закона сканирования, шестым выходом подключенного к второму входу формирователя начала реверса, а сед{|Мым выходом - к четвертому вхЪду измерителя углового положения, первый выход второй микроэвм соединен с пятым
входом измерителя углового положения, второй выход второй микроэвм соединен с третьим входом формирователя закона сканирования, а третий выход второй микроЭВМ подключен к седьмому входу первой микроэвм, второй вывод кадровой катушки рабочего хода соединен с общей точкой источника питания, а первый и второй входы . датчика начального положения связаны со
0 сканирующим зеркалом.
Предлагаемое устройство отличается от известного тем, что в него введены кадровая катушка рабочего хода, усилитель мощности кадровой развертки, датчик начального положения, две микроЭВМ, два запоминающих устройства, формирователь закона сканирования, управляемый генератор частоты, а также соответствующие связи между указанными элементами.
0 Введение новых элементов и связей позволяет расширить функциональнь1е возможности путем обеспечения сканирования в пространстве предметов по заданному закону (окружности, спирали, ломаной линии
5 и т.п.). В известных устройствах развертка осуществляется в пределах прямоугольного растра с фиксированными параметрами скоростей по строке и кадру.
В предлагаемом устройстве для сканирования в пространстве предметов по заданному произвольному закону используются кадровая катушка рабочего хода, усилитель мощности кадровой развертки, датчик начального положения, две микро5 ЭВМ, формирователь закона сканирования и управляемый генератор частоты, а также два запоминающих устройства. В запоминающем устройстве, связанном с первой микроэвм, хранятся уставки всех предпо0- лагаемых законов движения сканирующего зеркала, выбор которых осуществляется перед сеансом работы по шинам данных адреса и управления от внешнего устройств. Первая микроэвм осуществляет расчет текущего числа импульсов, соответствующих (для обеспечения заданной позиции сканирующего зеркала) определенному числу импульсов на выходе интерферометрического измерителя углового положения сканирую0 щего зеркала. Результаты расчета по мере их выполнения вводятся в оперативную память формирователя закона сканирова- . ния, После заполнения этой памяти в ней хранятся коды, соответствующие последовательности импульсов, численно соответствующих угловому перемещению сканирующего зеркала. Далее к этим таблицам памяти имеет доступ первая микроЭВМ, которая обеспечивает управление движением Сканирующего зеркала. Первая
микроэвм в этот момент времени осуществляет расчет кодов, соответствующих продолжению траектории сканирующего зеркала после отработки кодов, записанных в первые таблицы. Эти данные заносятся во вторые таблицы оперативной памяти формирователя закона сканирования. Время расчета каждого фрагмента траектории выбрано меньшим, чем время отработки, поэтому после расчета соответствующего фрагмента траектории первая микроЭВМ отключается и ждет данных об отработке предыдущего фрагмента. Сигналы об этом поступают из формирователя закона сканирования. С Приходом указанных сигналов производится переключение таблиц оперативной памяти для обеих микроЭВМ: вторые таблицы подключаются к вторым микроэвм и та ведет отработку следующего фрагмента, а первые таблицы, освободившиеся от второй микроэвм, подключаются к первой микроэвм и в них заносятся рассчитываемые коды программ движения для последующего фрагмента. Расчет указанных кодов ведется в соответствии с полученными выражениями, характеризующими связь между координатами положения визирного луча в пространстве предметов и требуемыми кодами, численно соответствующими угловому положению сканирующего зеркала при двухкоординатной развертке.
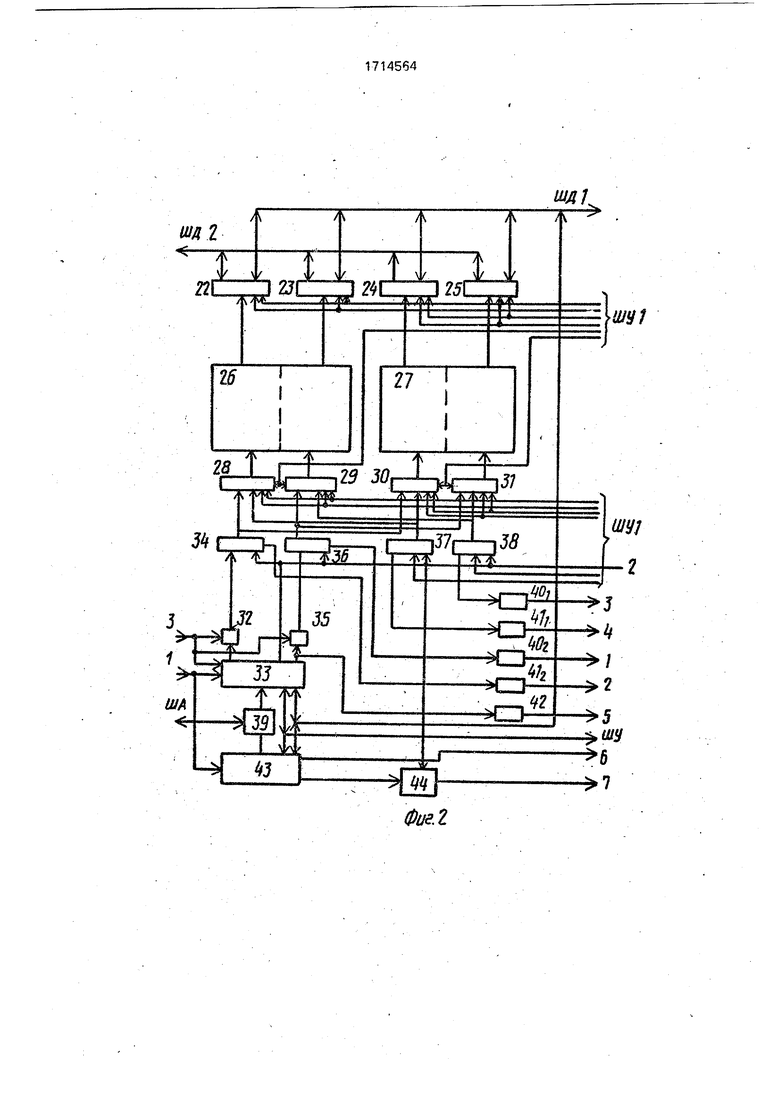
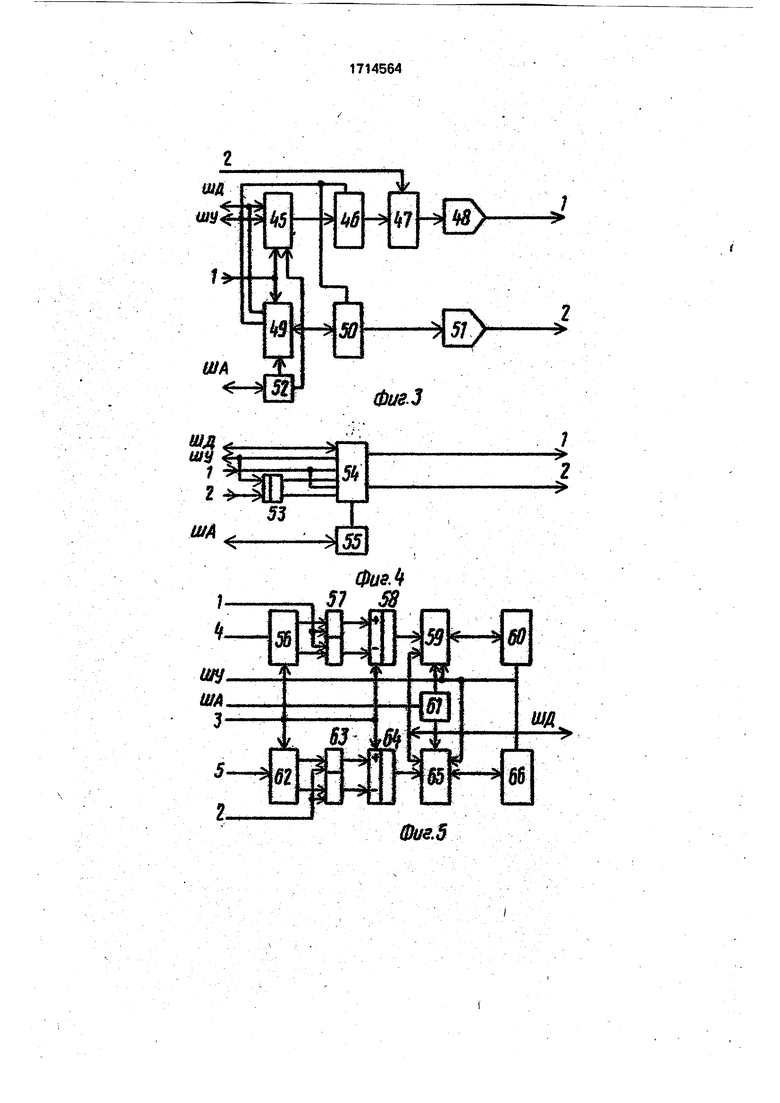
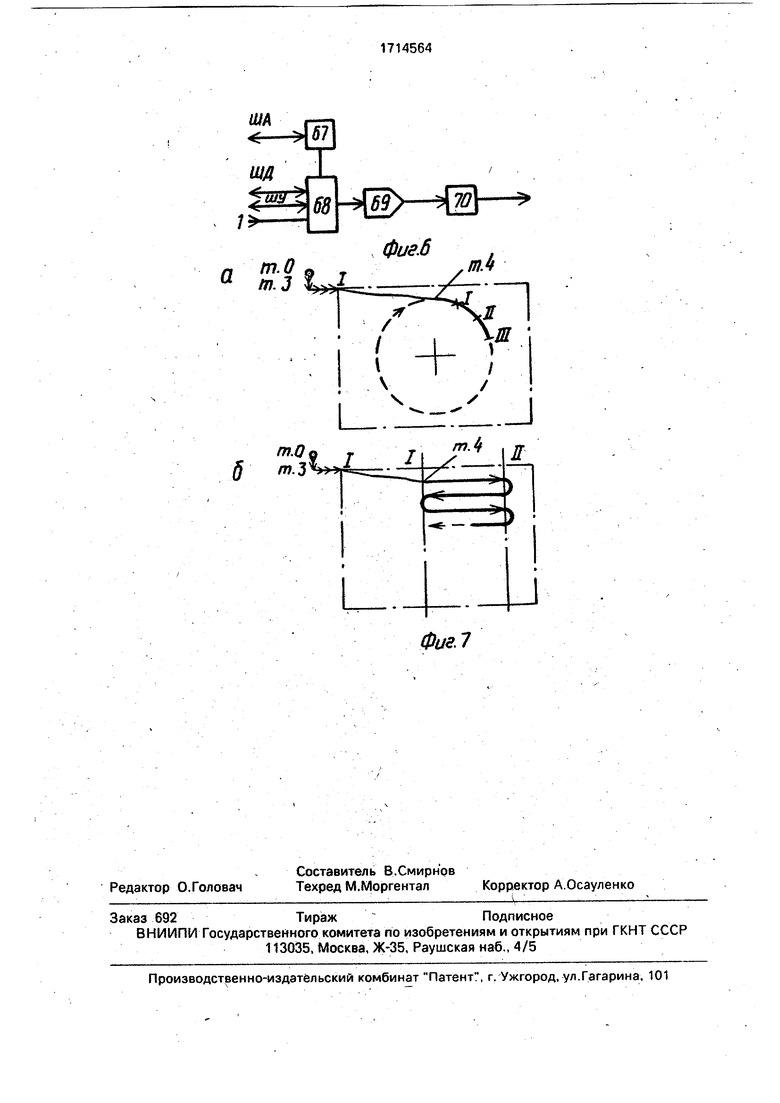
На фиг. 1 приведена структурная схема прецизионного сканирующего устройства; на фиг. 2 - структурная схема формирователя закона сканирования; на фиг. 3 - структурная схема формирователя сигнала ошибки; на фиг. 4 - структурная схема формирователя начала реверса; на фиг. 5 структурная схема измерителя углового положения сканирующего зеркала; на фиг. б структурная схема управляемого генератора частоты; на фиг. 7 - иллюстрация сканирования по различным законам.
Прецизионное сканирующее устройство (фиг. 1) содержит сканирующее зеркало (С.З) 1, магнитоэлектрический движитель 2. состоящий из жестко связанных с СЗ 1 кадровой катушки (КК) 3 и строчной катушки (С1 4. рабочего хода, катушки ревереа (КР) 5 строчной развертки, размещенных в зазорах между полюсами магнитной системы, усилитель Мощности кадровой развертки (УМК) 6 и строчной (УМС) 7 развертки, выходы УМК 6 и УМС 7 подключены к первым выводам соответственно КК 3 и СК 4 рабочего хода, входы УМК 6 и УМС 7 соединены соответственно с первым и вторым выходами формирователя сигнала ошибки (ФСО) 8, формир&ватель 9 реверса (ФР) строчной развертки, который включает измерительную катушку (И К) 10, пространственно совмещенную с КР 5, первый вывод ИК 10 подключен к входу ФР 9, а второй вывод ИК 10 соединен с вторым выводами КК 3 и СК4
и общей точкой источника питания, первый выход ФР 9 соединен с первым выводом КР 5, второй вывод КР 5 подключен к общей точке вентилей 11 и 12, включенных между полюсами источника питания, управляемые
0 входы вентилей 11 и 12 подключены соответственно к первому и второму выходам формирователя 13 начала реверса (ФИР); датчик 14 начального положения (ДНП), первый и второй входы которого связаны с СЗ
5 1, измеритель углового положения (ИУП) 15, первый и второй входы ИУП 15 связаны с СЗ 1, микроэвм 16, шины адреса, данных и управления которой подключены соответственно к внешним шинам адреса, данных и
0 управления и шинам адреса, данных и управления первого запоминающего устройства (ЗУ1) 17 и формирователя закона сканирования (ФЗС) 18, микроЭВМ 19, шины данных, адреса и управления которой
5 подключены соответственно к шинам данных, адреса и управления ФНР 13, ИУП 15, ФСО 8, управляемого генератора 20 частоты (УГЧ), второго запоминающего устройства (ЗУ2) 21 и шине данных ФЗС 18, первый
0 вход микроэвм 16 подключен к первым входам микроэвм 19, ФНР 13, ФЗС 18 и выходу УГЧ 20; второй вход микроЭВМ 16 подключен к внешнему входу Пуск, третий, четвертый, пятый и шестой входы мик5 роЭВМ 16 соединены соответственно с первым, вторым, третьим и четвертым выходами ФЗС 18. первый выход микроэвм 16 подключен к второму входу микроЭВМ 19 и третьему входу ДНП 14, первый выход ДНП
0 14 соединен с третьим входом микроЭВМ 19, второй выход ДНП 14 соединен с третьим входом ИУП 15, первыми входами ФСО 8, УГЧ 20, вторым входом ФЗС 18 и четвертым входом микроЭВМ 19; пятый вход мик5 роЭВМ 19 соединен с вторым выходом микроэвм 16, шестой вход микроЭВМ 19 соединен с вторым входом ФСО 8 и вторым выходом ФР 9, седьмой вход микроЭВМ 19 подключен к пятому выходу ФЗС 18, шестой
0 выход ФЗС 18 подключен к второму входу ФНР 13, седьмой выход ФЗС 18 подключен к четвертому входу ИУП 15, первый выход микроэвм 19,подключен к пятому входу ИУП 15, второй выход микроЭВМ 19 под5 ключей к третьему входу ФЗС 18, третий выход микроэвм 19 соединен с седьмым входом микроэвм 16.
ФЗС 113 включает в себя шинные формирователи 22-25, оперативные запоминающие устройства (ОЗУ) 26 и 27, шинные фор иирователи 28-31, логическую схему 32, программируемый таймер 33, регистр 34, логическую схему 35, регистры 36-38, дешифратор 39, одновибраторы 40-42, программируемый таймер 43 и триггер 44, В состав ФСО 8 входят регистр 45, логические схемы 46 и 47, цифроаналоговый преобразователь 48, регистр 49, логическая схема 50, цифроаналоговый преобразователь 51 и дешифратор 52. В ФНР 13 входит регистр 53, программируемый таймер 54 и дешифратор 55. ИУП 15 состоит из триггера 56, логической схемы 57, реверсивного счетчика 58, шинного формирователя 59, регистра 60, дешифратора d1, регистра 62, логической схемы 63, реверсивного счетчика 64, шинного формирователя 65 и регистра 66. Управляемый генератор частоты УГЧ 20 состоит и дешифратора 67, регистра 68, цифроаналогового преобразователя 69 и управляемого генератора 70 частоты. Устройство (фиг. 1) работает следующим образом. При закреплении СЗ 1 в кардановом подвесе координаты визирного луча в пространстве предметов при двухкоординатной развертке по углам аи (фиг. 7), задаваемым соответствующей программой, описываются уравнениями Х cosa(sina + cos« cos)3); (slna+ cos a cos/3) (1) Поскольку при управлении сканирующим зеркалом по иНтерферометрическому измерителю углового положения текущее угловое положение зеркала определяется целочисленным значением дискретов разрешения интерферометра, равным N. г А по оси сэС и NJJ Д по оси /3 , значения которых, в свою очередь, связаны с углами ос и rV А sin а Ы Л 81пД где А- /декрет разрешения интерферометра, то выражение (1) целесообразно преобразовать таким образом, чтобы найти соответственно выражения для sin а С08уЗи sin /Зи, тем самым, получить связь между требуемым числом Дискретов интерферометра и задаваемыми значениями координат визирного луча в пространстве предметов X и У. После преобразований получают { VAnvVl-W b Тогда, задавая необходимые для конкретной программы движения зеркала последовательности координат X и У, с помощью выражений(3) рассчитываются соответствующие им значения числа дискретов интерферометра по обеим осям а и/3, которые далее поочередно вводят в систему управления движенцем. Эти координаты могут поступать из внешнего устройства (не показано) либо при известных законах сканирования, описываемых аналитически (окружность, спираль, прямые линии различных наклонов, ломаные линии и т.п.), рассчитываются в процессе работы микроЭВМ 16 и поблочно вводятся в оперативную память ФЗС 18. Работа начинается загрузкой по внешним шинам (после подачи команды Пуск в ЗУ 17 исходных уставок для выполнения требуемого в данном конкретном случае закона движения. Для примера рассмотрим движение по окружности X + (4) В этом случае вводится величина R. Кроме того, устанавливается точность, с которой осуществляется сканирование. Устройство обеспечивает расчет последовательностей кодов, соответствующих дискретам интерферометра, с точностью, кратной п -А. Допустим, что расчеты ведутся для координат, отстоящих на А. Тогда эта величина .также поступает в качестве уставки в начале работы в микроЭВМ 16. Затем по окончании ввода данных в микроЭВМ 16 осуществляется расчет необходимого числа точек, для которых рассчитываются координаты X. При изменении Y от нуля до R через интервал А. Поскольку реальное число точек в требуемом поле обзора оказывается большим (например, при а /3 0,1 рад, А 10® рад, N J 4 10 точек, каждая из которых описывается двумя координатами в многобайтной структуре), то общий объем памяти оказывается чрезмерно большим. Позтому в составе ФЗС 18 (фиг. 2) применены два оперативных запоминающих устройства (ОЗУ) 26и27 дЛя записи и хранения соответственНо двух таблиц координат последовательных фрагментов траектории движения, причем пока данные из одного ОЗУ используются для управления движением СЗ 1 по программе из ЗУ 21 с помощью микроЭВМ 19, во второе ОЗУ вводятся данные о следующем фрагменте траектории движения по программе из ЗУ 17 с помощью микроЭВМ 16. Подключение указанных ОЗУ к соответствующим микроэвм, осуществляется по
шинам данных ЩД 2 и ЩД 1 с помощью шинных формирователей 22-25, управляемых микроэвм 16 по ШУ 1. Сразу после включения по команде Пуск микроЭВМ 16 выполняет следующие операции: переводит микроэвм 19 в режим ожидания, блокирует вoзмoжнoctь срабатывания ДНП 14, подключает ОЗУ 26 (фиг. 2) к ЩД 1с помощью шинных формирователей 22 и 23 адресация ОЗУ 26 осуществляется регистрами 37 и 38, подключенными через шинные формирователи 28 и 29, инициализирует таймеры 33 и 43, адресуемые с помощью дешифратора 39. Таймер 33 определяет частоту адресации к ОЗУ 26 или 27 (в зависимости от того с каким ОЗУ работает микроЭВМ 19) и, следовательно, скорость движения СЗ 1; Таймер 43 вырабатывает сигналы начала формирования импульса реверса, которые могут иметь различное временное положение для различных направлений сканирования и выдаются на соответствующие входы ФНР 13 (фиг, 1), Кроме того, сигнал стаймера 43, проходя через триггер 44, используется для формирования сигнала смены направления движения СЗ 1 при достижении реальных границ поля обзора в строчном направлении. Этот сигнал используется для переключения триггера 56 в ИУП 15 (фиг. 5) и изменения направления счета в реверсивном счетчике 58 при смене направления движения СЗ 1.
После этого микроЭВМ 16 по программе, записанной в. ЗУ 17, осуществляет расчет координат первого франмента заданной траектории движения (фиг. 7а), которые записываются в ОЗУ 26 (фиг. 2). После окончания ввода координат микроЭВМ 16 вырабатывает сигнал Начало (выход 1 микроэвм 16, фиг. 1), которой разрешает работу ДНП 14 и микроэвм 19, а также переключает ОЗУ 26 (фиг. 2) к ЩД 2, а ОЗУ 27 к ЩД 1. Одновременно к шине адреса ОЗУ 26 подключается регистры 34 и 36 через ЩФ 28 и 29, а к шине адреса ОЗУ 27 регистры 37 и 38 через шинные формирователи 30 и 31, Далее микроЭВМ 16 ждет команды от микроэвм 19 начать расчет координат для второго фрагмента траектории движения. Микроэвм 19 по программе, записанной в ЗУ21, начинает поиск начальной метки (т.О, фиг. 7), которая реализуется электромагнитным упором, к которому притягивается С31. В этой части работа устройства полностью совпадает с работой прототипа. После прижима СЗ 1 к упору в т. О микроэвм 19 отрабатывает программу поиска кадровой координаты начала поля обэора (т, 3, фиг, 7а}, кода в ФСО 8 (фиг, 3} в регистр 49 вводится воздействие, которое
через логическую схему 50, используемую для учета знакавоздействия, поступает в цифроаналоговый преобразователь 51, с выхода которого сигнал передается в УМ К 6
(фиг. 1). На выходе последнего формируется ток, протекающий через КК 3. Под действием тока в СК 4 возникает электромагнитное поле, взаимодействующее с полем постоянного магнита магнитоэлектрического движителя (фиг. 1) и СЗ 1 начинает перемещаться из т, О в т. 3. По координате строчного движения программа обеспечивает стабилизацию положения. После достижения отметки 3 (фиг, 7а) на выходе ДНП
5 14 вырабатывается импульс, соответствующий начальной отметке поля обзора в кадровом направлении, и микроЭВМ 19 переходит в режим поиска отметки начала поля обзора в строчном направлении (т. 1,
0 фиг. 7 а). В этом случае вырабатывается воздействие, управляющее перемещением СЗ строчном направлении, в кадровом осуществляется стабилизация положения. Сигнал воздействия поступает через регистр
5 45, логические схемы 46, учитывающие знак ошибки, и 47, используемую для отключения канала формирования сигнала ошибки по строке во .время реверса строчного движе ния, и, проходя ЦАП 48 (фиг. 3), поступает
0 далее на УМС 7 и в СК 4. Аналогично тому, как это осуществляется в кадровом направлении, СЗ 1 перемещается в положение 1 (фиг, 7). По достижении т. 1 (фиг. 7) на втором выходе ДНП 14 вырабатывается сигнал, свидетельствующий о том, что СЗ 1 достигло физического начала поля обэгора, в пределах которого надлежит осуществлять сканирование. Этот сигнал подается в ФЗС 18 (фиг. 2) и устанавливает в исходное состояние
0 регистры 34, 36, 37 и 38, обеспечивая тем самым обращение к ОЗУ 26 и 27 с нулевых адресов, а также триггер 44, чем обеспечивается соответствие сигнала направления движения на выходе 7 ФЗС 18 физическому
5 перемещению СЗ 1 в направлении внутрь поля обзора (к т. 4), По этому же сигналу осуществляется установка в ноль регистров 56,58,62, 64 в ИУП 15 (фиг. 5), регистров 45, 49 в ФСО 8 (фиг, 3} и регистра 68 в УГЧ 20
0 (фиг. 6). Нулевой код регистра 68 через цифроаналоговый преобразователь 69 обеспечивает исходное значение частоты на выходе уг равляемого генератора 70 частоты (фиг. 6). Затем микроЭВМ 19 по этому
5 сигналу осуществляет ввод абсолютных значений кодов координаты т, 1 (фиг, 7а), т.е. начала поля обзора, в регистры 66 и 60 блока ИУП 15 (фиг. 5) через шинные формирователи 59 и 65, адресуемые с помощью дешифратора 61. После этого микроэвм 19
переводится в режим рдботы в поле обёора, т.е. поочередно считывает данные из ОЗУ 26 (координаты т. 4, фиг. la, записанные в начальные адреса таблиц ОЗУ 26) и значение текущих координат СЗ 1, которые в данный момент соответствуют т. 1 (фиг. 7), и производит расчет сигналов ошибки по строке и кадру, которые поочередно выдает со своими знаками в блок ФСО 8 (фиг. 3). Сигнал ошибки по строке проходит через регистр 45, логические схемы 46, ,47;И ЦАП 48, сигнал ошибки по кадру через регистр 49, логическую схему .50 и 1ДАП S1 и под действием этих сигналов СЗ Vперемещается от т. 1 к т, 4 (фиг. 7). Адресация к регистрам 45 и 49 осуществляется дешифратором 52. Одновременно с началом указанного движения микроэвм 19 разрешает микроЭВМ 16 начать расчет последовательности координат следующего фрагмента траектории движения (фиг. 7а). В процессе движения СЗ 1, скорость которого физически ограничена, время обращения микроЭВМ 19 к ОЗУ 26 и, следовательно, цикла расчетов сигналов ошибки значительно меньше времени перемещения СЗ 1 из т. 1 в т. 4. При этом содержимое первых ячеек ОЗУ 26 (координаты т. 4) остаются неизменными, а текущее содержимое в регистрах 60 и 86 ЙУП 15 (фиг. 5) непрерывно меняется в зависимости от числа импульсов, приходящих на входы 1 и 2 ИУП 15 с интерферометра, устано ленного на СЗ 1. В результате сигнала ошибки уменьшаются по величине по мере движения СЗ 1 к отметке 4 и при достижении этой отметки становятся равны нулю. Это состояние непрерывно проверяется (на каждом цикле) а микрдЭВМ 19 и при достижении нуля на выходе 2 микроЭВМ 19 вырабатывается сигнал, разрешающий подключение выходов таймера 33 блока ФЗС 18 (фиг. 2) к соответствующим регистрам 34 и 36 через логические элементы 32 и 35. Одновременно разрешается работа таймера 33, на выходах которого вырабатывается сигналы адресации к ОЗУ 26. Частоты этих сигналов могут быть либо одинаковыми (как в рассматриваемом примере, когда координаты соседних точек различны) или кратными (например, при чисто строчном движении, когда координаты по кадру в пределах строки одинаковы и нет смысла менять адресацию к таблице кадровых координат в пределах строки, фиг. 76). Такимобразом СЗ 1 перемещается по заданному в ОЗУ 26 первому фрагменту траектории движения, а микроЭВМ 16 ведет расчет и ввод в ОЗУ 27 координат следующего фрагмента движения. Указанные расчеты заканчиваются быстрее, чем СЗ 1 достигнет конца первого фрагмента (в силу тех }ke физических ограничений скорости движения СЗ 1 с требуемой точностью), поэтому по окончании ввода данных микроэвм 16 останавливается и переходит
в режим ожидания конца фрагмента. Сигналы окончания движения по данному фрагменту поступают в микроЭВМ 16 с выходов регистров 34 и 36 через одновибраторы 402 и 412. В результате микроэвм 16 осуществляет переключение ОЗУ 26 и ОЗУ 27 таким образом, что к микроэвм оказывается подключено ОЗУ 27 через шинные формирователи 24 и 25, управление адресацией этого ОЗУ вновь осуществляется регистрами 34 и
5 36, которые считают с нулевых адресов и подключаются через шинные формирователи 30 и 31. Микроэвм 19 продолжает отработку заданной траектории движения по координатам второго фрагмента, записанным в ОЗУ 27, а микроЭВМ 16 рассчитывает координаты следующего фрагмента. И так далее дотех пор, пока не будет завершён полный цикл развертки и СЗ 1 не вернется в исходную позицию (т. 4, фиг. 7а). В этом
5 случае с выхода одновибратора 42 (фиг. 2) на микроэвм 16 выдается сигнал прерывания, по которому осуществляется проверка числа заданных циклов развертки. Если задан один цикл, то микроэвм 16 останавливает
0 работу. Если несколько циклов, то работа продолжается до полного их числа. Если требуется развертка по строчному закону (фиг. 76), то переход от строки к строке сопровождается реверсом СЗ 1. В этом случае
5 в момент достижения границы строки (например, т. 2, фиг. 76) в микроэвм 19 вырабатывается сигнал начала реверса, который определяет задержку в формировании импульса реверсирующего тока от границы по0. ля (т. 2). Код указанной задержки вводится в таймер 54 блока ФНР 13 (фиг. 4), адресуемый дешифратор 55. Поскольку величина задержки может отличаться для различных направлений сканирования (на границе 1 и
5 на границе 2, фиг. 76), то используется два независимых таймера 54, включаемых поочередно триггером 53. Сигнал с соответствующего выхода таймера 54 включает один из вентилей 11 или 12 и в результате этого с
0 помощью ФР 9, КР 5 и ПК 10 осуществляется реверс. Поскольку в этот момент система регулирования движением СЗ 1 управляется только блоком ФР 9, то в ФСО 8 (фиг. 3) на логическую схему 47 приходит импульс,
5 блокирующий работу этой части схемы на все время реверса.
Предлагаемое устройство в сравнении с известным за счет радикальных изменений в схеме обеспечивает возможность движения сканирующего зеркала по произвольному закону, задаваемому аналитически или от внешнего датчика.
Формул аизобретения Прецизионное сканирующее устройство, содержащее сканирующее зеркало, маг«итоэяектрический движитель, состоящий из жестко связанных со сканирующим зеркалом строчной катушки рабочего хода и катушки реверса строчной развертки, размещенных в зазорах между полюсами магнитных систем, усилитель мощности строчной развертки, выходом подключенный к первому выводу строчной катушки рабочего хода, а входом к первому выходу формирователя сигнала ошибки, формирователь реверса строчной развертки, который вкяюяает измерительную катушку, пространетвенно совмещенную с катушкой .реверса U первым выводом подключенную к входу формирователя реверса строчной развертки, а вторым вывЪдом соединенную с вторым выводом строчной катушки рабочего хода и общей точкой источника питания, первый выход формирователя реверса строчной р азвертки соединен с первым выводом катушки реверса, втором выводом Подключенной к общей точке вентилей, вк1ноче14ных между полюсами источника питания, управляющие вход вентилей подключены соответственно к первому и второму выходам формирователя начала реверса, измеритель углового положения скани{)ующего зеркала, первым и вторым вхОДдМи соединенного со сканирующим зеркалом, о т л и чаю Щ ее с я тем, что, с целью расширения функциональных возможностей путем обеспечения сканирования,по заданному произвольному закону в пространстве предметов, введены кадровая катушка рабочего хода, усилитель мощности кадровой развертки, датчик начального положения, первая и вторая микроЭрМ, формирователь закона сканирования, пераЬе и второе запоминающие устройства, управляемый генератор частоты, причем кадровая катушка рабочего хода размещена в зазорах между полюсами магнитных систем и первым выводом подключена к выходу усилителя мощности кадровой развертки, входом подключенного к второму выходу формирователя сигнала ошибки, внешние Шины данных, адреса и управления подключены к соответствующим шинам данных, адреса и управления первой микроЭВМ,
первого запоминающего устройства и формирователя закона сканирования, шины данных, адреса и управления второй микроЭВМ подключены соответственно к шинам
данных, адреса и управления формирователя начала реверса, измерителя углового положения сканирующего зеркала, формирователя сигнала ошибки, управляемого генератора частоты, второго запоминающего
устройства и шине данных формирователя закона сканирования, первый вход первой микроэвм подключен к первым входам второй микроэвм, формирователя закона сканирования, формирователя начала реверса
и выходу управляемого генератора частоты, второй вход первой микроЭВМ подключен к внешнему входу Пуск, третий, четвертый, пятый и шестой входы первой микроЭВМ соединены соответственно с первым,
вторым, третьим и четвертым выходами формирователя закона сканирования, первый выход первой микроэвм подключен к второму входу второй микроэвм и третьему входу датчика начального положения, первый выход которого соединен с третьим входом второй микроэвм, второй выход датчика начального положения соединен с третьим входом измерителя углового положения, первыми входами формирователя
сигнала ошибки, управляемого генератора частоты, вторым входом формирователя закона сканирования и четвертым входом второй микроЭВМ, пятым входом соединенной с вторым выходом первой микроЭВМ, а шестым входом - с вторым входом формирователя сигнала юшибки и вторым выходом формирователя реверса строчной развертки, седьмой вход второй микроЭВМ .подключен к пятому выходу формирователя
закона сканирования, шестым выходом подключенного к второму входу формирователя начала реверса, а седьмым выходом к четвертому входу измерителя углового положения, первый выход второй микроэвм
соединен с пятым входом измерителя углового положения, второй выход второй микроэвм соединен с третьим входом формирователя, закона сканирования, третий выход второй микроэвм подключен к седьмому
входу первой микроэвм, второй вывод кадровой катушки рабочего хода соединен с общей точкой источника питания, а первый и второй входы датчика начального положения связаны со сканирующим зеркалом.
Фие.г
Шие.П
Фиг. 7
| Оптикомеханическое прецизионное развертывающее устройство | 1984 |
|
SU1167569A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
