Фиг.1
систем. Автоматизированная система орошения включает.насосный агрегат 1 с блоком 2 регулирования расхода, магистральный трубопровод 3 с подключенными к нему через запорные органы 7 поливные установки 6, а также блок 16 управления системой с подключенными к нему датчиками А и 5 технологических параметров, контролируемые пункты (КП) 15, -соединенные меньшей связью 14 с измерителем 13 тока, блоком 12 формирования импульсов и источником 11 питания. На КП установлены импульсные электрогидро- реле, подключенные к распределителям 9, управляющим работой гидропри
водов 8 запорных органов. Измеритель 13 тока через пороговый элемент 17 подает телесигналы о работе КП в блок управления системой. Последний выполнен в виде микропроцессора, анализирующего телесигналы с КП, представляющие собой закодированную величину давления на входе каждой поливной установки, получаемую с реле 10 давления. В результате анализа этих телесигналов блок управления системой выдает команды телеуправления в блок
12 формирования импулъсов, по которым .происходит переключение импульсных -электрогидрореле в контролируемых
пунктах. 1 з.п.ф-лы,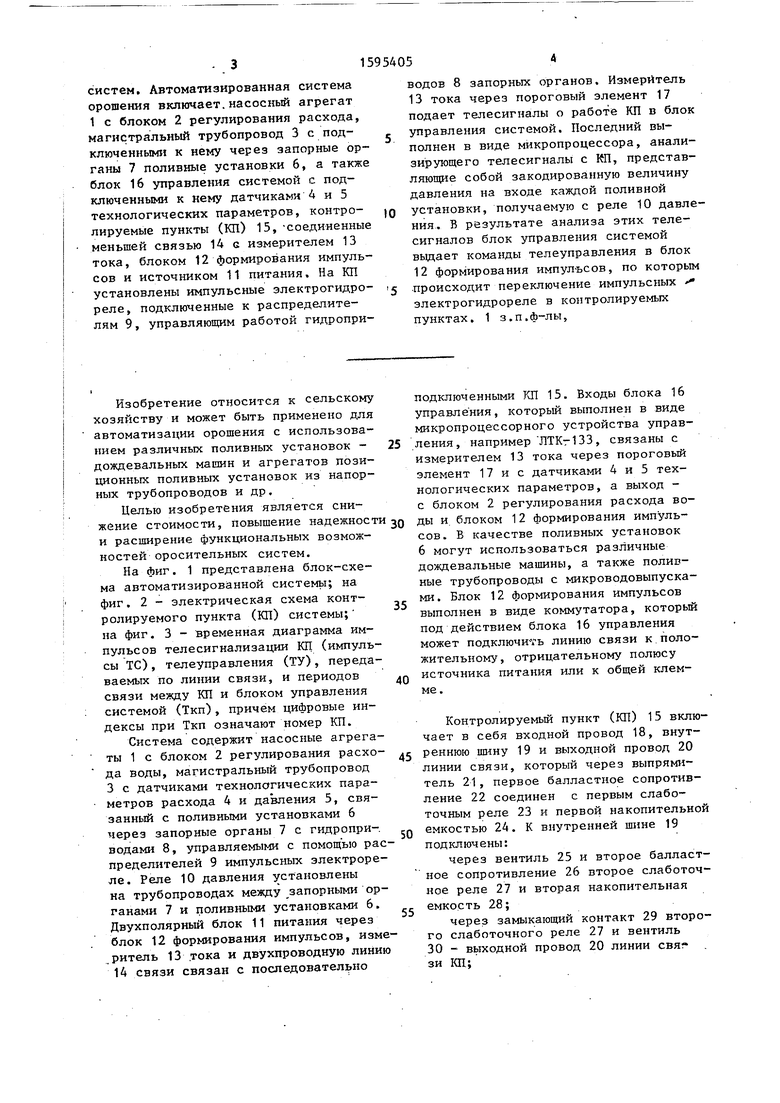

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система управления поливом | 1987 |
|
SU1570677A1 |
| Способ полива | 1986 |
|
SU1471993A1 |
| Автоматизированная оросительная система | 1983 |
|
SU1186163A1 |
| Система управления и аварийной защиты многоопорной дождевальной машины | 1985 |
|
SU1360653A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2009 |
|
RU2402199C1 |
| Устройство управления и защиты многоопорной дождевальной машины | 1985 |
|
SU1376986A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ ДАВЛЕНИЯ В ЗАКРЫТОЙ ОРОСИТЕЛЬНОЙ СЕТИ | 2001 |
|
RU2236781C2 |
| СПОСОБ МЕЛИОРАЦИИ В ПРЕДГОРНОЙ ЗОНЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2387127C1 |
| Автоматизированная система управления сосредоточенным поливом | 1987 |
|
SU1523125A1 |
| ЦЕНТРАЛИЗОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА С РАСПРЕДЕЛЕННЫМИ КОНТРОЛИРУЕМЫМИ ПУНКТАМИ | 2003 |
|
RU2240245C1 |

Изобретение относится к сельскому хозяйству и может быть использовано для автоматизации оросительных систем с различными поливными установками напорного полива. Цель изобретения - снижение стоимости, повышение надежности и расширение функциональных возможностей оросительных систем. Автоматизированная система орошения включает насосный агрегат 1 с блоком регулирования расхода 2, магистральный трубопровод 3 с подключенными к нему через запорные органы 7 поливные установки 6, а также блок управления системой 16 с подключенными к нему датчиками 4 и 5 технологических параметров, контролируемые пункты (КП) 15, соединенные меньшей связью 14 с измерителем тока 13, блоком 12 формирования импульсов и источником питания 11. На КП установлены импульсные электрогидрореле, подключенные к распределителям 9, управляющим работой гидроприводов 8 запорных органов. Измеритель тока 13 через пороговый элемент 17 подает телесигналы о работе КП в блок управления системой. Последний выполнен в виде микропроцессора, анализирующего телесигналы с КП, представляющие собой закодированную величину давления на входе каждой поливной установки, получаемую с реле давления 10. В результате анализа этих телесигналов блок управления системой выдает команды телеуправления в блок 12 формирования импульсов, по которым происходит переключение импульсных электрогидрореле в контролируемых пунктах. 1 з.п.ф-лы.
25
Изобретение относится к сельскому озяйству и может быть применено для втоматизации орошения с использоваием различных поливных установок - ождевальных машин и агрегатов позиионных поливных установок из напорых трубопроводов и др.
Целью изобретения является снижение стоимости, повышение надежности 30 и расширение функциональных возможностей оросительных систем.
На фиг. 1 представлена блок-схема автоматизированной системьт; на фиг. 2 - электрическая схема контролируемого пункта (КП) системы; на фиг. 3 - временная диаграмма импульсов телесигнализации КП: (импульсы те), телеуправления (ТУ), передаваемых по линии связи, и периодов связи между КП и блоком управления системой (Ткп), причем цифровые индексы при Ткп означают номер КП.
Система содержит насосные агрегаты 1 с блоком 2 регулирования расхо- да воды, магистральный трубопровод 3 с датчиками технологических пара- метров расхода 4 и давления 5, связанный с поливными установками 6 через запорные органы 7 с гидроприводами 8, управляемыми с помощью распределителей 9 импульсных электрореле. Реле 10 давления установлены на трубопроводах между ,запорными органами 7 и поливными установками 6. Двухполярный блок 11 питания через блок 12 формирования импульсов, измеритель 13 тока и двухпроводную линию 14 связи связан с последовательно
35
5
30
35
40
45
50
55
подключенными КП 15. Входы блока 16 управления, который выполнен в виде микропроцессорного устройства управления, например ЛТКт133, связаны с измерителем 13 тока через пороговый элемент 17 и с датчиками 4 и 5 технологических параметров, а выход - с блоком 2 регулирования расхода воды и блоком 12 формирования импульсов. В качестве поливных установок 6 могут использоваться различные дождевальные машины, а также поливные трубопроводы с микроводовыпуска- ми. Блок 12 формирования импульсов выполнен в виде коммутатора, который под действием блока 16 управления может подключи-гь линию связи к положительному, отрицательному полюсу источника питания или к общей клемме.
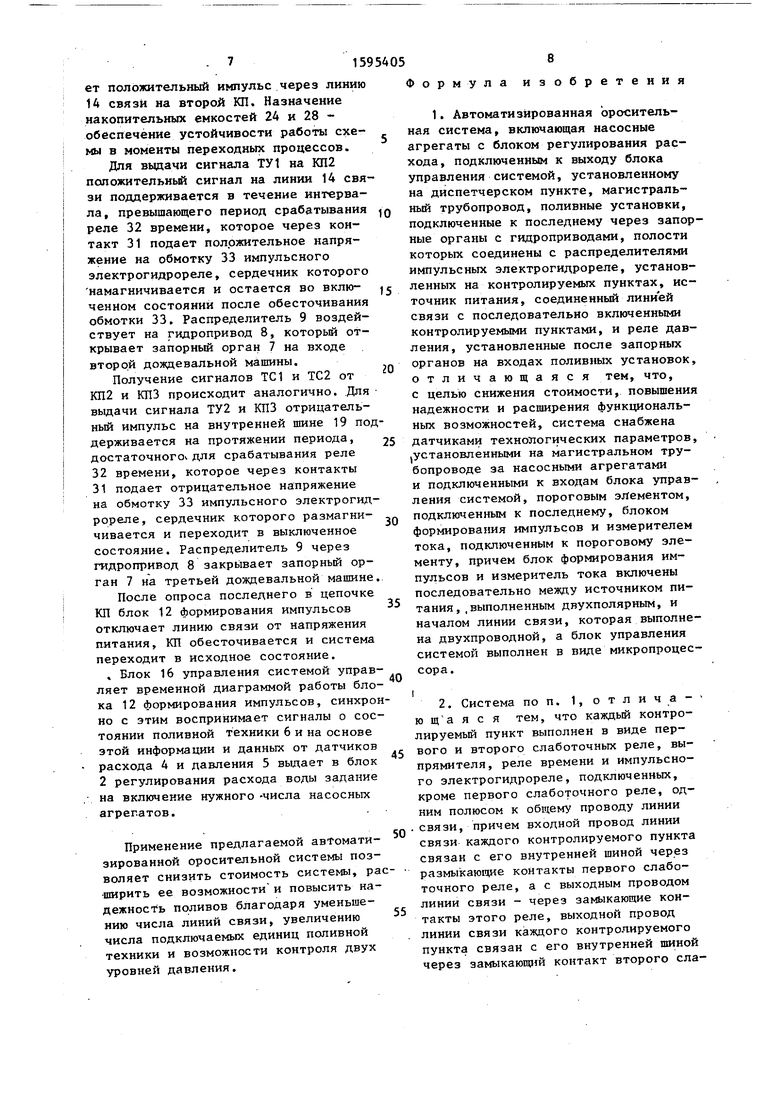
Контролируемый пункт (КП) 15 включает в себя входной провод 18, внутреннюю шину 19 и выходной провод 20 линии связи, который через выпрямитель 21, первое балластное сопротивление 22 соединен с первым слаботочным реле 23 и первой накопительной емкостью 24. К внутренней шине 19 подключены:
через вентиль 25 и второе балластное сопротивление 26 второе слаботочное реле 27 и вторая накопительная емкость 28;
через замыкающий контакт 29 второго слаботочного реле 27 и вентиль 30 - выходной провод 20 линии связи КП;
через замыканлдий контакт 31 реле времени 3i2 обмотка импульсного элек рогидрореле 33;
через размыкающий контакт 34 рел 32 времени, нагрузочное сопротивление 35 и два параллельно соединенны контакта 36 и 37, реле давления 10 общий провод линии связи 14, причем последовательно с контактами 36 и 3 реле давления 10 включены диоды 38 прямо, а диоды 39 - встречно.
Переключающая группа контактов 40 первого слаботочного реле 23 соединяет входной провод 18 линии связ в нормальном положении с внутренней шиной 19, а в сработанном положении с выходным проводом 20 линии связи. В качестве импульсного электрогидро реле может использоваться электрогиравлический клапан КЭГ-И-16/8.
Автоматизированная оросительная система работает следующим образом.
Допустим, что система орошения включает три дождевальные машины (дм), причем на полив включена только третья дождевальная машина. При этом требуется проконтролировать сотояние всей поливной техники и переключить полив с третьей дождевально машины на вторую. Для этого нужно получить телесигнал ТС1 о контроле, давления на каждом контролируемом пункте (КП) для каждой дождевальной машины, телесигнал управления ТУ 1 высокого уровня на включение второй ДМ, телесигнал ТУ2 низкого уровня на отключение третьей ДМ и телесигналы ТС2 контроля величины давления после окончания цикла управления данным КП. Таким образом, должны быть сформированы сигналы ТС1 и ТС2 о давлении для каждого из трех КП, вьщан в КП2 сигнал ТУ 1 на включение второй ДМ, а в КПЗ - сигнал ТУ2 на отключение третьей ДМ.
В исходный момент нремени в магистральном трубопроводе 3 установлено рабочее давление, запорный орган 7 открыт на третьей дождевальной машине, в линию 14 связи сигнал не вьщается, все КП 15 обесточены.
В момент времени t. блок 16 управления воздействует на блок 12 формирвания импульсов , который выдает в линию 14 связи положительный импульс, попадающий на вход первого КП 15, который переходит в активное состояние. Положительный сигнал че
6
5
0
5
0
5
рез размыкающие контакты 40 и 34, внутреннюю щину 19, нагрузочное сопротивление 35, диод 38 поступает на , контакт 36 реле 10 давлеш1я. В случае, если бы он был замкнут, через нагрузочное сопротивление 35 протекал бы ток, KOTopbBi воспринимается измерителем 13 тока и через пороговый Q элемент 17 фиксируется блоком 16 управления как сигнал ТС1 для первого КП. Для повышения помехоустойчивости схемы номинал нагрузочного сопротивления выбирается таким, чтобы че- J рез него проходил ток, превьш1ающий ток слаботочных реле 23, 27 в 10-20 раз.
В момент времени tj блок 12 формирования импульсов переключает входной 0 провод линии связи на отрицательный полюс источника 11 питания. Поскольку интервал Jt t - t меньше периода срабатывания реле 32 времени, контакт 31 не замыкается и импульсное электрогидрореле 33 не переключается. Отрицательный сигнал с внутренней шины 19 через вентиль 25 и балластный резистор 26 включает реле 27, которое своими контактами 29 подготавливает включение реле 23. В это же время блок 16 управления системой фиксирует сигнал ТС2 от порогового элемента 17 и измерителя 13 тока, KOTopbtfi воспринимает ток, протекающий через линии 14, 18, шину 19, контакты 34, нагрузочное сопротивление 35, вентиль 39 и контакт 37 реле 10 давления.
В момент времени tj бло к 13 формирования импульсов вновь переключает входной провод линии связи на поло- жительньп полюс источника 11 питания, и начинается переходный процесс переключения КП1 из активного состояния в состояние передачи и переключения- КП2 из обесточенного состояния в активное состояние. Положительный сигнал с внутре1П1ей шины 19 через замкнутый контакт 29 и вентиль 30 поступает на выпрямитель 21 и через балластное сопротивление 22 включает реле 23, которое своими контактами 40 соединяет входной 18 и выходной 20 провода связи линии КПК Поскольку при этом обесточивается внутренняя шина 19, то после разряда емкости 28 отключается реле 27, а реле 23 остается включенным через выходной провод 20 линии связи, которьп пода0
. 71595405
т положительный импульс через линию А связи на второй КП. Назначение акопительных емкостей 24 и 28 - беспечение устойчивости работы схе- ы в моменты переходных процессов.
Для выдачи сигнала ТУ1 на КП2 опожительньй сигнал на линии 14 свяи поддерживается в течение интерваа, превышающего период срабатывания Q еле 32 времени, которое через конакт 31 подает положительное напряение на обмотку 33 импульсного электрогидрореле, сердечник которого намагничивается и остается во вклю- 5 ченном состоянии после обесточивания обмотки 33. Распределитель 9 воздействует на гидропривод 8, который открывает запорный орган 7 на входе второй дождевальной машины.
Получение сигналов ТС1 и ТС2 от КП2 и КПЗ происходит аналогично. .Для выдачи сигнала ТУ2 и КПЗ отрицательный импульс на внутренней шине 19 поддерживается на протяжении периода, 25 достаточного для срабатывания реле 32 времени, которое через контакты 31 подает отрицательное напряжение на обмотку 33 импульсного электрогидрореле, сердечник которого размагни- чивается и переходит в выключенное состояние. Распределитель 9 через гидропривод 8 закрывает запорный орган 7 на третьей дождевальной машине. После опроса последнего в цепочке КП блок 12 формирования импульсов отключает линию связи от напряжения питания, КП обесточивается и система переходит в исходное состояние.
Блок 16 управления системой управляет временной диаграммой работы блока 12 формирования импульсов, синхронно с этим воспринимает сигналы о состоянии поливной техники 6 и на основе этой информации и данных от датчиков расхода 4 и давления 5 выдает в блок 2 регулирования расхода воды задание на включение нужного -числа насосных агрегатов.
50
35
40
Применение предлагаемой автоматизированной оросительной системы позволяет снизить стоимость системы, рас- ширить ее возможности и повысить надежность поливов благодаря уменьше- нию числа линий связи, увеличению числа подключаемьк единиц поливной техники и возможности контроля двух уровней давления.
50
5
0
8 Формула изобретения
боточного реле и вентиль, а обмотки каждого слаботочного реле зашунтиро- ваны накопительными емкостями, при этом второй полюс выпрямителя подключен к выводному проводу линии связи, второй полюс реле времени подключен к внутренней шине, причем обмотка первого слаботочного реле подключена к выходам выпрямителя через первое балластное сопротивление, а второй полюс обмотки второго слаботочного
10
реле подключен к внутренней шине через второе балластное сопротивление и вентиль, второй полюс обмотки импульсного электрогидрореле подключен через замыкающие контакты реле времени к внутренней шине, соединенной с общей шиной через размыкающие контакты реле времени, нагрузочное сопро тивление и две параллельно включенные цепи из контактов реле давления и встречно включенных диодов.
| Автоматизированная оросительная система | 1983 |
|
SU1186163A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
