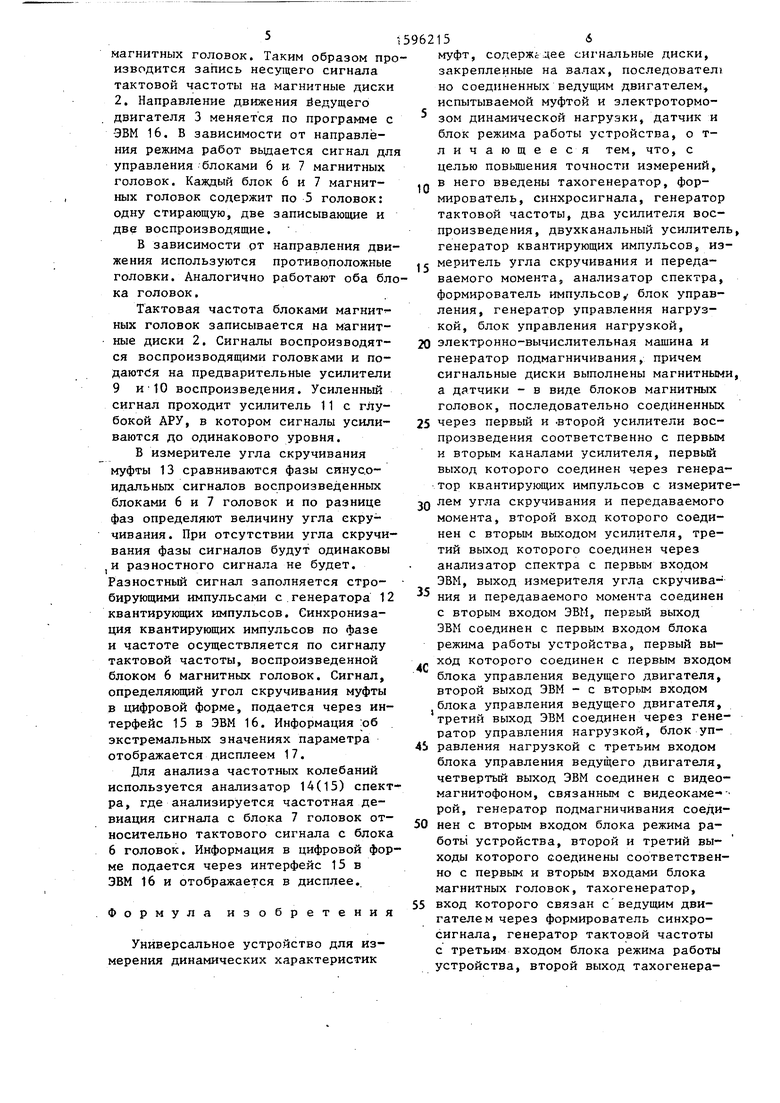
Чгэобретение относится к измери -. тельной технике и может быть использовано при регистрации основньпс характеристик различных соединительных муфт. Цель изобретения - повышение точности измерений в широком диапазоне рабочих частот вращения. Па чертеже представлена блок-схема предлагаемого универсального устройства для измерения динамических характеристик муфт. Устройство содержит исследуемую муфту 1. Па концах валов полумуфт закреплены магнитные диски 2, первый из них присоединен к валу ведущего двигателя 3, а другой - к валу элект ротормоза 4 динамической нагрузки и вся вращающаяся система вала заканчивается со стороны ведущего двигат ля датчиком верхней мертвой точки (ВМТ) с тахогенератором 5, а также из двух блоков 6 и 7 головок, присое диненных своими входами к блоку 8 режима работы устройства, выходы через усилители 9 и 10 воспроизведения к двухканальному усилителю с АРУ 11 Один выход усилителя 11 присоединен к входу управления генератором 12 квантирующих импульсов, второй - к измерителю 13 угла скручивания (деформации) и передаваемого момента, а третий - к анализатору 14 спектра. Выход измерителя 13 угла скручивания и передаваемого момента Подключен к входу (интерфейса) ЭВМ, состоящей из интерфейса 15 непосредственно ЭВМ 16 и дисплея 17. Выход анализатора 14 спектра соединен с другим входом ЭВМ 16.Первый выход интерфейса соединен с ЭВМ 16, а выход ЭВМ - с дисплеем 17.Программа испытаний передается с ЭВМ 16 через интерфейс 15 по его четырем выходам: на блок 8 режима работы, на блок 18 управления ведущим двигателем, на управляющий блок видеомагнитофона 19 и на генератор 20управления нагрузкой, а выход генератора нагрузки соединен с блоком 21управления нагрузкой, напряжение выработанное нагрузочным генератором 4, подается на блок 21 управления нагрузкой выход после него соединен по схеме рекуперации с блоком 18 управления ведущего двигателя, выход которого соединен с ведущим двигателем 3. Валом ведущего двигателя проводится в действие вся вращающаяся .система устройства в сторону Hcnf.iтуемой муфты 1, а также и на тахогенератор 5, первый выход которого соедивен через усилитель - формирователь 23 синхросигнала с управляющим входом генератора 24 тактовой частоть}, а выход последнего соединен с одним из входов блока 8 режима работы, а другой выход датчика верхней мертвой точки (ВМТ) тахогенератора 5 соединен с входом формирователя 25 импульса ВМТ, выход которого соединен с входом блока 26 управления импульсной лампой и управляющий сигнал включения импульсной лампы с выхода блока 26 поступает на импульсную лампу 27, Полезньй видеосигнал интересующего нас узла или точкииспытуемой муфты поступает на видеокамеру 28, выход которой поступает на вход видеомаг нитофона 19, -получающего сигнал управления от интерфейса 15. Устройство работает следующим образом. С ЭВМ 16 по заданной программе через интерфейс 15,- блоком 18 управления задается режим работы ведущего двигателя 3. Один конец вала ведущего двигателя 3, на котором крепится магнитный диск 2 соединен муфтой 1 с динамической нагрузкой 4, на валу которой крепится такой ее магнитный диск 2. Режим динамической нагрузки задается блоком 21 управления, в который подаются управляющие сигналы с генератора 20 управляемого напряжения (ГУН).. Режим ГУН устанавливается через интерфейс 15 по программе ЭВМ 16. К другому концу ведущего двигателя 3 крепится тахогенератор с датчиком 5 верхней мертвой точки (ВМТ). Формирователем 25 импульсов ВМТ выделяется и формируется импульс ВМТ, управляющий вспьш1койимпульсной лампы 27. Таким образом производится съемка видеокамерой 28 той же вращающейся точки муфты 1. Тахогенератором 5 вырабатываются синхросигналы, которые усиливаются, в усилитёлеформирователе 23 синхросигнала и используются для синхронизации генератора 24 тактовой частоты. Тактовая частота с генератора подается в блок 8 режима работы, в котором она смешивается ; с частотой генератора 22 11одмагничивания. С блока 8 релсима работы тактовая частота с сигналом подмагничивания подается на блоки 6 и 7
магнитных головок. Таким образом призводится запись несутцего сигнала тактовой частоты на магнитные диски 2. Направление движения ведущего . двигателя 3 меняется по программе с -ЭВМ 16, В зависимости от направления режима работ выдается сигнал дл управления блоками 6 и 7 магнитных головок. Каждый блок 6 и 7 магнитных головок содержит по 5 головок: одну стирающую, две записывающие и две воспроизводящие,
В зависимости от направления движения используются противоположные головки. Аналогично работают оба блка головок.
Тактовая частота блоками магнитных головок записывается на магнитные диски 2, Сигналы воспроизводятся воспроизводящими головками и подаются на предварительные усилители 9 и10 воспроизведения. Усиленный сигнал проходит усилитель 11 с глубокой АРУ, в котором сигналы усиливаются до одинакового уровня,
В измерителе угла скручивания муфты 13 сравниваются фазы сннус.оидальньпс сигналов воспроизведенных блоками 6 и 7 головок и по разнице фаз определяют величину угла скручивания. При отсутствии угла скручивания фазы сигналов будут одинаковы ,и разностного сигнала не будет, Разностный сигнал заполняется стробирующими импульсами с генератора 12 квантирующих импульсов. Синхронизация квантирующих импульсов по фазе и частоте осуществляется по сигна41у тактовой частоты, воспроизведенной блоком 6 магнитных головок. Сигнал, определяющий угол скручивания муфты в цифровой форме, подается через интерфейс 15 в ЭВМ 16, Информация :об . экстремальных значениях параметра отображается дисплеем 17,
Для анализа частотных колебаний используется анализатор 14(15) спектра, где анализируется частотная девиация сигнала с блока 7 головок относительно тактового сигнала с блока 6 головок, Информация в цифровой форме подается через интерфейс 15 в ЭВМ 16 и отображается в дисплее.
Формула изобретения
Универсальное устройство для измерения динамических характеристик
962136
муфт, содержг две сигНальные диски, закрепленные на валах, последовател но соединенных ведущим двигателем, испытываемой муфтой и электротормо зом динамической нагрузки, датчик и блок режима работы устройства, о тличающееся тем, что, с целью повышения точности измерений,
.Q в него введены тахогенератор, формирователь, синхросигнала, генератор тактовой частоты, два усилителя воспроизведения, двухканальный усилитель, генератор квантирующих импульсов, из.с меритель угла скручивания и передаваемого момента, анализатор спектра, формирователь импульсов у блок управления, генератор управления нагрузкой, блок управления нагрузкой,
20 электронно-вычислительная машина и генератор подмагничивания, причем сигнальные диски выполнены магнитными, а датчики - в виде блоков магнитных головок, последовательно соединенных
25 через первый и -второй усилители воспроизведения соответственно с первым и вторым каналами усилителя, первый выход которого соединен через генератор квантирующих импульсов с измеритеJQ лем угла скручивания и передаваемого момента, второй вход которого соединен с вторым вьпсодом усилителя, третий выход которого соединен через анализатор спектра с первым входом ЭВМ, выход измерителя угла скручива35ния и передаваемого момента соединен с вторым входом ЭВМ, первый выход ЭВМ соединен с первым входом блока режима работы устройства, первый выход которого соединен с первым входом блока управления ведущего двигателя, второй выход ЭВМ - с BTopbiM входом блока управления ведущего двигателя, третий выход ЭВМ соединен через генератор управления нагрузкой, блок уп4S равления нагрузкой с третьим входом блока управления ведущего двигателя, четвертый выход ЭВМ соединен с видеомагнитофоном, связанным с видеокаме-рой, генератор подмагничивания соеди50 иен с вторьм входом блока режима работы устройства, второй и третий выходы которого соединены соответственно с первым и вторым входами блока магнитных головок, тахогенератор, 55 вход которого связан сведущим двигателем через формирователь синхросигнала, генератор тактовой частоты с третьим входом блока режима работы устройства, второй выход тахогенера 1596215 . 8
тора соединен через формирователь -, вал электротормоэа динамической наимпульса, блок управления импульсной грузки связан с блоком управления лампы с импульсной лампой, при этом динамической нагрузки.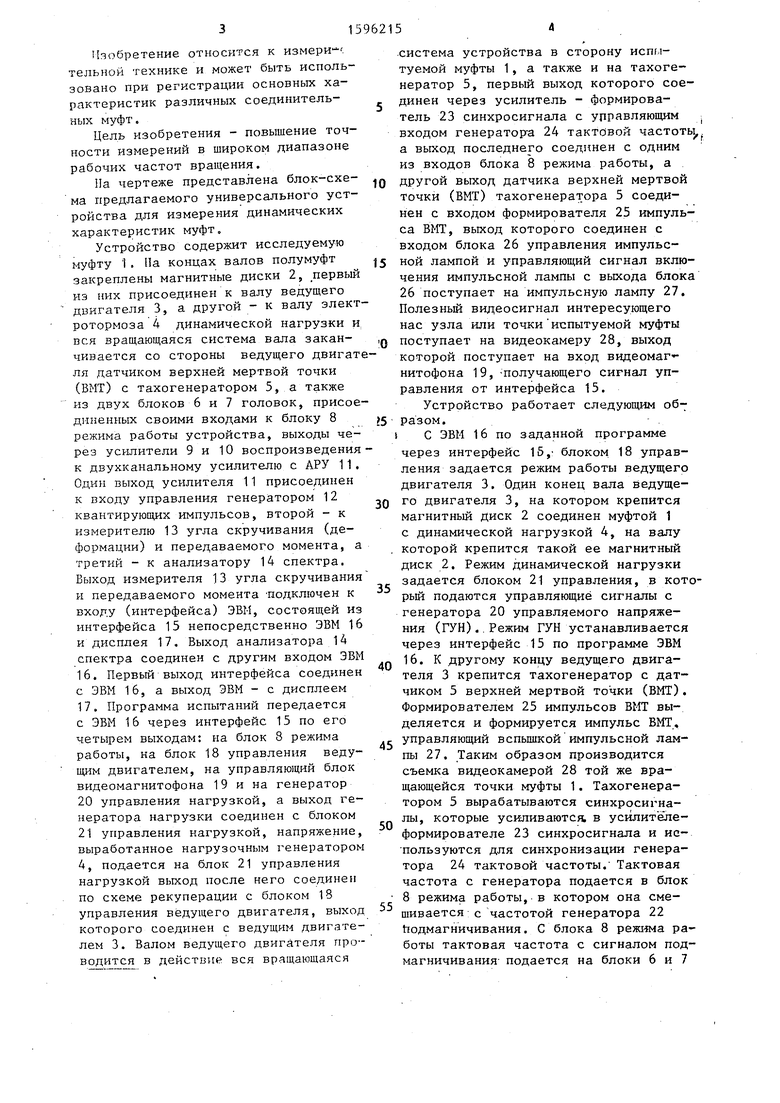
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля угловых деформаций валов вращающихся объектов | 1989 |
|
SU1763877A1 |
| УСТРОЙСТВО ДЛЯ ЦИФРОВОЙ МАГНИТНОЙ ЗАПИСИ ИНФОРМАЦИИ НА ВИДЕОМАГНИТОФОНЕ | 1993 |
|
RU2042218C1 |
| Способ записи-чтения информации и устройство управления накопителем | 1986 |
|
SU1436125A1 |
| Устройство для контроля угловых деформаций валов вращающихся объектов | 1986 |
|
SU1384932A1 |
| СПОСОБ СНИЖЕНИЯ ЭМОЦИОНАЛЬНОГО НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2035892C1 |
| ВНБШО^- = | 1973 |
|
SU361467A1 |
| СПОСОБ УПРАВЛЕНИЯ МОМЕНТОМ ЗАЖИГАНИЯ И СИСТЕМА ЗАЖИГАНИЯ С ЭЛЕКТРОННЫМ РЕГУЛИРОВАНИЕМ УГЛА ОПЕРЕЖЕНИЯ ЗАЖИГАНИЯ | 1993 |
|
RU2073794C1 |
| Устройство для сегментации,анализа и монтажа сигналов | 1975 |
|
SU532880A1 |
| Устройство для воспроизведения с носителя магнитной записи | 1988 |
|
SU1624517A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ МАГНИТНОЙ ЛЕНТЫ В ВИДЕОМАГНИТОФОНЕ С ПОПЕРЕЧНОЙ СТРОЧНОЙ ЗАПИСЬЮ | 1967 |
|
SU214642A1 |
Изобретение относится к измерительной технике и может быть использовано при регистрации основных характеристик различных соединительных муфт. Цель изобретения - повышение точности измерений в широком диапазоне рабочих частот вращения. Устройство содержит испытуемую муфту 1, сигнальные диски 2, ведущий двигатель 3, динамическую нагрузку 4, датчики, электронные блоки управления и формирования, аппаратуру импульсного освещения, измеряющие и регистрирующие устройства. Магнитные диски с автономными блоками магнитных головок (по пять в каждом), соединены с усилителями воспроизведения и генератором подмагничивания через общий блок режима работы, а выходы усилителей воспроизведения - с общим усилителем с АРУ, три выхода которого соединены с генератором квантирующих импульсов, измерителем крутильных колебаний, угла скручивания, частоты и момента вращения, с анализатором спектра, выходы которых соединены с входом интерфейса. Кроме того, в систему включены ЭВМ, дисплей и видеоаппаратура. 1 ил.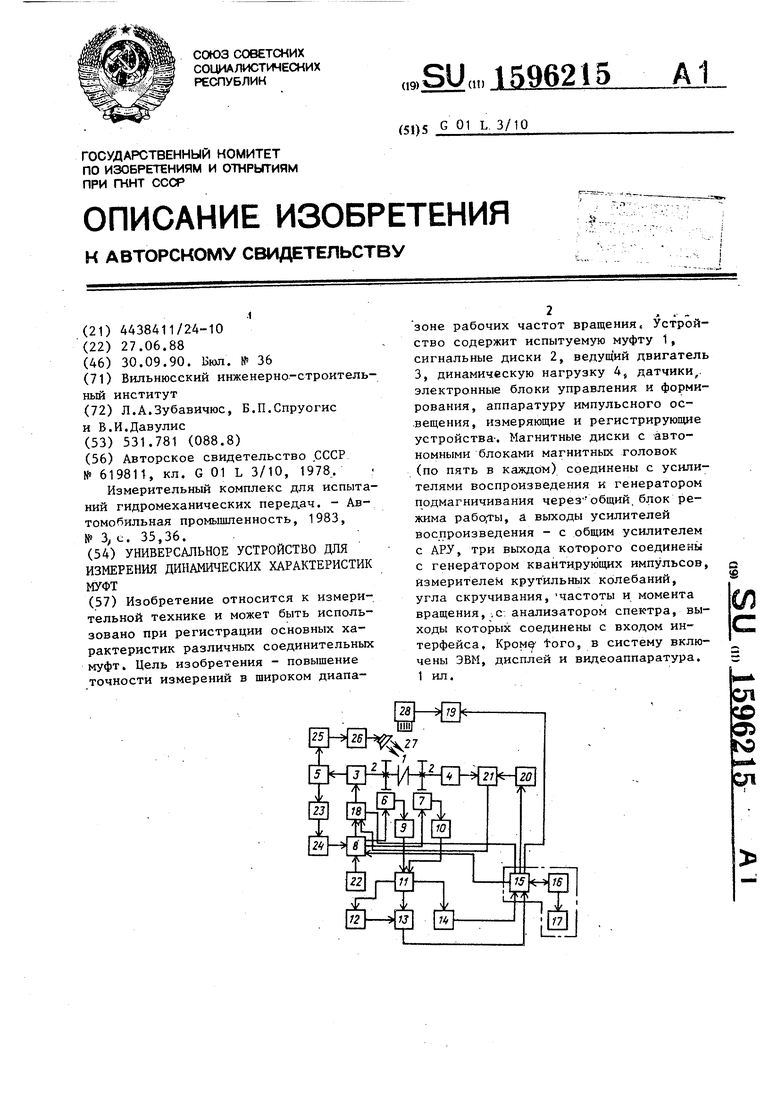

| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ НА РАССТОЯНИЕ ПОКАЗАНИЙ МАНОМЕТРОВ, ТЕРМОМЕТРОВ И Т. П. ПРИБОРОВ | 1927 |
|
SU6198A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - Автомобильная промышленность, 1983, № 3^ с | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
