дкнен с соответствующим входом первого сумматора блока учёта взаимного влияния фазных ЭДС вращения, выход которого через усилитель соединен с первым входом второго сумматора и через замыкающие контакты пороговых реле блока формирования фазных управляющих функций соединен с входами третьего сумматора, выход которого соединен с вторым входом второго сумматора, выход которого соединен с вторым входом второго сумматора, выход которого соединен с первыми входами сумматоров блока формирования фазных токов, вторые входы ко- торых подключены соответственно к выходам блока формирования фазных ЭДС вращения, а выходы блока формирования фазных напряжений соединены соответственно с третьими входами сумматоров блока формирования фазных токов, выход каждого из которых через другой размыкающий контакт соответствующего порогового реле блока формирования фазных управляющих функций и соответствующее инерционное
Iзвено соединен с соответствующим входом блока формирования фазных моментов вращения.
2. Устройство по п. 1, отличающееся тем, что блок формирования фазных напряжений содержит источник опорных напряжений, схемы сравнения, задатчик напряжений, коммутаторы по числу фаз моделируемого напряжения и сумматоры, причем вход задатчика напряжений является первым входом блока, первый и второй выходы задатчика напряжений соединены соответственно с первыми и вторыми входами коммутатора, выходы которых соединены соответственно с входами сумматоров, выходы которых являются выходами блока, а выходы источника опорных напряжений соединены соответственно с первыми входами схемы сравнения,вторые входы которых объединены и являются вторым входом блока, выходы схем сравнения соответственно соединены с управляющими входами коммутаторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления бесконтактным двигателем постоянного тока | 1980 |
|
SU904136A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Устройство для моделирования @ -фазного вентильного электродвигателя | 1990 |
|
SU1797133A1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Устройство для регулирования бесконтактного двигателя постоянного тока | 1975 |
|
SU736893A3 |
Изобретение относится к аналоговой вычислительной -технике и может найти применение при разработке и исследовании на АВЙ бесконтактных двигателей постоянного тока с различными схемами обмотки и типами коммутаторов, а также при проектировании и исследовании электроприводов, выполненных на базе подобных двигателей.
Известны устройства для моделирования бесконтактных двигателей постоянного тока, схемы которых обусловлены различным подходом к рассмотрению бесконтактного двигателя постоянного тока. Если бесконтактный двигатель рассматривается как конструктивное объединение синхронного двигателя с управляющим прлупроводниковым коммутатором, то в качестве наиболее распространенного устройства для «го моделирования используется схема моделирования, основанная на замене т-фазной
обмотки двигателя эквивалентной однофазной обмоткой to
Подобная схема моделирования не позволяет учестъ основной особенности бесконтактного двигателя постоянного тока, заключающейся в том, что частота переключений„секций обмотки регулируется автоматически
самой машиной благодаря наличию позиционной обратной связи ротора по отношению к статору.
Наиболее близким по технической сущности является устройство, состоящее из источника постоянного питания, соединенного, с токовым блоком, блока формирования момента вращения двигателя, сумматора и интегратора, на выходе которого формиру-.
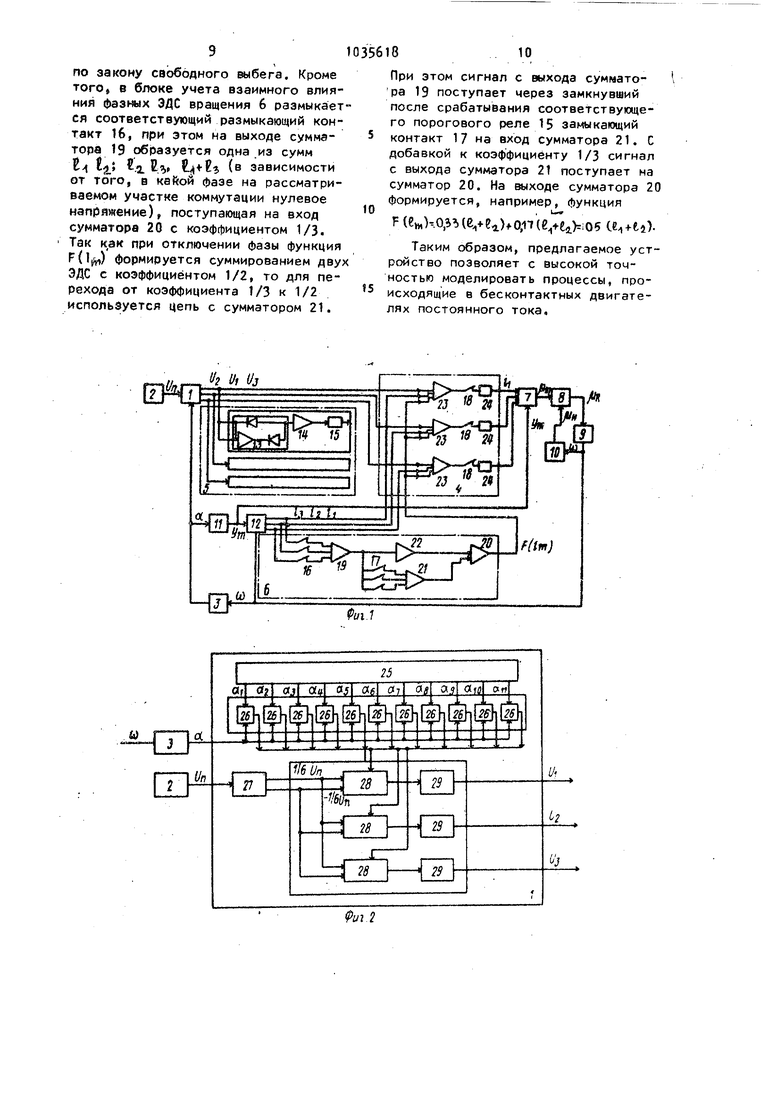
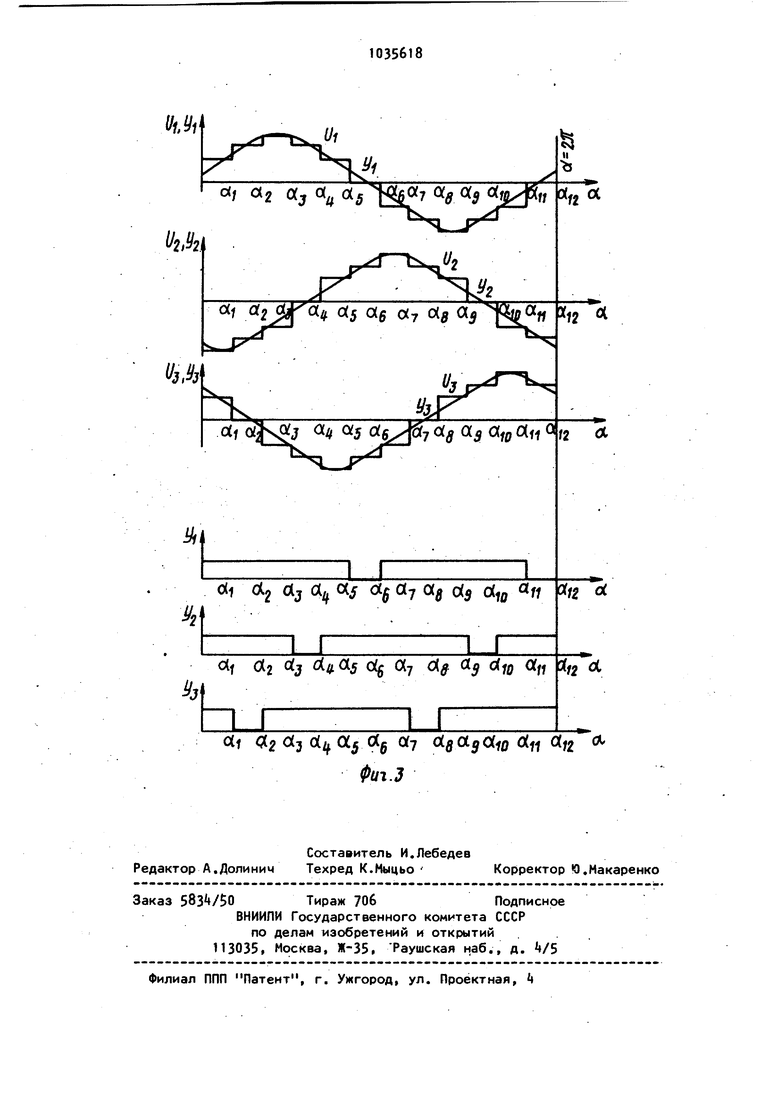
ется скорость вращения двигателя tJU поступающая на блок, формирующий момент нагрузки, на блок формирования ЭДС. вращения и блок формирования углового положения ротора, в котором скорость вращения двигателя превращается в угол пиворота ротора и преобразуется в периодическую функцию угла сС с периодом, равным отрезку угла между двумя соседними переключениями -реального коммутатора бесконтактного двигателя постоянного тока блока формирования функции распределения магнитной индукции t2. Известное устройство не учитывает наличие пульсирующего магнитного роля в воздушном зазоре, создаваемого (Л-фазной обмоткой двигателя, закон торможения, влияние друг на друга ЭДС вращения отдельных фаз и В1Лияние ассимметрии фаз обмоУки, всегда имеющую место в реальных двигателях, т.е. в этом устройстве довольно грубо и неполно отражаются процессы, протекающие в реальных дви гателях. Цель изобретения - повышение точности моделирования. Для достижения цели в устройство для моделирования бесконтактного дви гателя постоянного тока, содержащее источник питания, блок формирования моментов вращения, блок формирования фазных ЭДС вращения, блок формирования момента нагрузки, блок формирования угла поворота ротора, блок формирования фазных функций рас пределения магнитной индукции, сум-; MjiTOp и интегратор, причем выход ; блока формирования фазНЫхмоментов вращения соединен с первым входом сумматора, выход которого соединен с входом интегратора, выход которого является выходом устройства и соеди нен со входом блока формирования мо мента нагрузки, выход которого соеди нен со вторым входом сумматора, а выход интегратора соединен со входом блока формирования фазных ЭДС вращения и через блок формирования угла поворота ротора соединен с вхо дом блока формирования фазных функций распределения магнитной индукции, выходы которого соответственно соединены с группой входов блока фор мирования фазных ЭДС вращения и с первой группой входов блока .формиро вания фазных моментов вращения, дополнительно введены блок формирования фазных напряжений, блок формирования фазных управляющих функций, состоящий из каналов по числу фаз моделируемого напряжения, каждый из которых содержит узел выделения модуля, усилитель ипороговое реле, блок учета взаимнЬго влияния фазных ЭДС вращения, содержащий три сумматора, усилитель, замыкающие и одни размыкающие контакты пороговых реле блока формирования фазных управляющих функций, блок формирования фазных токов, содержащий сумматоры по числу фаз моделируемого тока, другие размыкающие контакты пороговых реле блока формирования фазных управляющих функцийи инерционные звенья, причем выход источника питания соединен с первым входом блока формирования фазных напряжений, второй вход которого подключен к выходу блока формирования угла поворота ротора, а каждый из выходов блока формирования фазнмх напряжений соединен через соответствующий узел выделения модуля блока формирования фазных управляющих функций и усилитель - с управляющим входом соответствующего, порогового реле, и каждый из выходов блока формирования фазных ЭДС вращения через один размыкающий контакт соответствующего порогового реле блока формирования фазных управляющих функций соединен с соответствующим входом первого сумматора блока учета взаимного влияния фазных ЭДС вращения, выход которого через :усилитель соединен с первым входом второго сумматора и через замыкаюи;ие контакты пороговых реле блока формирования фазных управляющих функций соединен с входами третьего сумматора, которого соединен с вторым входом второго сумматора, выход которого соединен с первыми входами сумматоров блока формирования фазных токов, вторые входы которых подключены соответственно к выходам блока формирования фазных ЭДС вращений,, а выходы блока формирования фазных напряжений соединены соответственно с третьими входами сумматоров блока формирования фазных токов, выход каждого из которых через другой размыкающий контакт соответствующего порогового реле блока формирования фазных управляющих функций и соответствующее инерционное звено соединен с соответствующим входом блока формиро вания фазных моментов вращения. Причем блок формирования фазных напряжений содержит источник опорных напряжении, схемы сравнения, задатчик напряжений, коммутаторы по числ фаз моделируемого напряжения и сумматоры, причем вход задатчика напря жений является первым входом блока, первый и второй выходы задатчика на пряжений соединены соответственно с первыми и вторыми входами коммутаторов, выходы которых соединены соответственно с входами сумматоров выходы которых являются выходами блока, а выходы источника опорных напряжений соединены соответственно с первыми входами схем сравнения, вторые входы которых объединены и являются вторым входом блока, вывод схем сравнения соответственно соеди нены с управляющими входами коммута торов. На фиг, 1 представлена структурная схема устройства для моделирования бесконтактного двигателя постоянного тока; на фиг. 2 - схема блока фазных напряжений для трехфазного 6ecKOHTaKtHoro двигателя . постоянного тока (т - число фаз обмотки равное трем) с лучевой обмоткой j мостовым коммутатором, углом йоммутации, равным 5/67Г электрических радиан (j - число участков переключения ступенчатой функции фазного напряжения за один оборот ротора , равное двенадцати), синусоидальной формой ЭДС вращения, торможением со свободным выбегом; на фиг, 3 - фазные напряжения двигателя, представляющие собой сдвинутые по фазе ступенчатые зависимости напряжения от угла поворота ротора («), 1)2.(оО, ). фазные функции распределения магнит ной индукции NJ f (о1)2, V(L ci) Ъ «f(o(.) фазные управляющие функции, также являющиеся функциями угла поворота ротора (d.), If f(o(),(p2 в статике. Устройство для моделирования бесконтактного двигателя постоянного тока содержит блок формирования фазных напряжений 1, иctoчник питания 2, блок формирования угла поворота ротора 3, выполненный по схеме генератора пилообразного напряжения блок формирования фазных токов, блок формирования фазных управляющих функций 5, блок учета взаимного влияния фазных ЭДС вращения 6, блок формирования фазных моментов 18 вращения 7 выполненный по схеме умножения двух переменных на постоянной множитель, сумматор 8, интегратор 9 блок 10 формирования момента нагрузки, блок 11 формирования фазных функций распределения магнитной индукции и блок 12 формирования фазных ЭДС вращения. Блок формирования фазных управляющих функций 5 состоит из т-каналов. Каждый канал содержит узел выделения модуля 13, усилитель 1 и пороговое реле 15,. имеющее размыкакхцие контакты 161 замыкающие 17 и размыкающие 18, Блок учета взаимного влияния фазных ЭДС вращения 6 содержит первый и второй сумматоры 19, 20, третий сумматор 21 и усилитель 22, Блок формирования фазных токов реализован с помощью VM стандартных сумматоров 23 и инерционных звеньев 2. Блок формирования фазных напряжений 1 содержит источник опорных напряжений 25, схемы сравнения 2б, задатчик напряжений 27. коммутаторы 28 и сумматоры 29. Устройство работает следующим образом, Напряжение питания двигателя U. поступает от источника питания 2 на задатчик напряжений 27 блока формирования фазных иапряжений 1, На выходе задатчика напряжений 27 формируются вольтдобавки 1/6 Пу и -1/6 U|, на основе которых происходит формирование ступенчатых фазных напряжений. При ,,, фазные напряжения и f foe), фазные функции распределения магнитной индукции ()l фазные управляющие функции Ч f(oL) соответствуют значениям этих функций при с 0 (см. фиг, З). . В начальные моменты времени, когда , , устройство работает под действием сигналов с блока формирования фазных напряжений 1, поступающих на блок формирования фазных токов k. На выходе блока формирования фазных токов + под действием (aO появляются фазные токи 1, которые,поступая на блок формирования фазных моментов вращения 7 совместно с фазными функциями распределения магнитной индукции VVM f(c(), создают вращающий момент двигателя vn ,. Сумматор 8 вырабатывает результирующий момент Мц при суммировании вращающего момента двигателя MgpC моментом нагрузки М, создаваемым блоком формирования момента нагрузки 10 в зависимости от скорости двигателя 6U по уравнению ( ,)-K/7u. hloU iO. Результирующий момент Мр, поступая с сумматора 8 на интегратор 9, преобразуется в скорость двигателя U/, которая, действуя на блок фор мирования угла поворота ротора 3, превращается в уголповорота ротора ci, квантованный на отрезки равные углу поворота ротора двигателя за один его оборот. На выходе блока 3 получается пилообразный сигнал, который, поступая на блок формирования фазных функций распределения магнитной индукции 11 и на блок формирования фазных напряжений 1, создает соответственно фазные функции распределения магнитной индукции ) f (об)-типа представленных на фиг. 3, Фазные напряжения (oi) типа представленных на фиг (oO, поступая на блок формирова ния фазных ЭДС вращения 12, совмест но с сигналом IV формируют фазные ЭДС вращения ByV СК „«4, которые за тем поступают на блок формирования фазных токов k и на блок учета взаимного влияния фазных ЭДС вращения 6, сигналы с выхода которого также поступают на вход блока формировани фазных TOKOfj 4. Как только сигналы 8уу, и F (1) начинают участвовать в формировании фазных токов . . При работе двигателя с транзисторным коммутатором на разных участ ках коммутации бывает включено раз ное количество фаз обмотки, что про является в ступенчатой форме фазных напряжений обмотки. При этом в отключенных фазах (U 0) происходит процесс торможения. В устройстве эти режимы реализуется следующим образом. В блоке формирования фазных напряжений 1 (см. фиг. 3) пилообразны сигналов, поступающий с блока формирования угла поворота ротора 3, с помощью J-1 схем сравнения 2б (j количество участков переключения фазных напряжений) и источника опо ных напряжений 25 квантуется на j участков величиной 1/6. 88 С помощью коммутаторов 28, постро енных на контактах схем сравнения 26на выходе сумматора 29 по мере прохождения сигналом eL значенийс 1А, и срабатывания соответствующих схем 26, формируются фазные напряжения из вольтдобавок 1/6 и U,вырабатываемых задатмиком напряжений 27по закону, определяемому диаграммой фазных напряжений для рассматри-. ваемого варианта двигателя (ICM. фиг.ЗСхемы сравнения управляют формированием J-1 участка переключения фазных напряжений. Конец последнего участка совпадает с периодом работы формирования угла поворота ротора 3. Если на всех фазах обмотки двигателя напряжение отлично от нуля, значит все фазы включены и на выходе блока учета взаимного влияния фазных ЭДС вращения 6 формируется сигнал Р(у„)1/3(1 +12+Ь ). Равенство нулю (o(.) на каком-либо участке коммутации означает отключение соответствующей фазы обмотки, причем на разных участках могут отключаться разные фазы. В устройстве эти режимы осуществляются с помощью блока формирования фазных управляющих функций 5 основным назначением которого является вь1явление нулевых участков в соответствующих фазных напряжениях. Эта операция осуществляется следующим образом. На пороговое реле 15 задается нулевое опорное напряжение , на второй его вход с выхода усилителя 1 поступает, сигнал Uj . Так как (J) является положительйым сигналом при всех , то блок 5 срабатывает только при нулевом напряжении и . Работа порогового реле 15 у-словг но изображается через фазные переключающиеся функции ч. f (с) (см. фиг. 3), где импульсы соответствуют отсутствию нулевых участков в фазных напряжениях, паузы - наличию нулевых участков. Если пороговое реле 15 сработало, своим размыкающим контактом 1В в блоке формирования фазных токов k оно отключает сумматор 23 от инерционного звзна 2, на выходе которого формируется ток соответствующей фазы, при этом в фазе осуществляется тормозной режим за счет отключения входного сигнала инерционного звена
по закону свободного выбега. Кроме того в блоке учета взаимного влияния фазн«х ЭДС вращения 6 размыкает ся соответствующий размыкающий контакт 16, при этом на выходе сумматора 19 образуется одна из сумм t ЕЗ. 1 г (в зависимости от того, в кайой фазе на рассматриваемом участке коммутации нулевое напряжение), поступающая на вход сумматора 20 с коэффициентом 1/3. Так к,ак при отключении фазы функция F{I) формируется суммированием двух ЭДС с коэффициентом 1/2, то для перехода от коэффициента 1/3 к 1/2 используется цепь с сумматором 21.
При этом сигнал с выхода сумматора 19 поступает через замкнувший после срабатывания cooTBetcTByiomeго порогового реле 15 замыкающий контакт 17 на вход сумматора 21. С добавкой к коэффициенту 1/3 сигнал с выхода сумматора 2t поступает на сумматор 20. На аг)ходе сумматора 20
формируется, например, функция
L-
F (Ch,)-o,i(vea)f оя г --еа ю ).
Таким образом, предлагаемое устройство позволяет с высокой томностью моделировать процессы, происходящие в бесконтактных двигателях постоянного тока.
ы
II ъ
С(2 (Xj 01, % 0(9
ы
1 « СХб 0(7 0( «5
rt«rt
«t ot
ы
ч.
(/:
Otf (У,
Й7 о( а а,о o(fi Q
/2 Л
