входы которого через эамьжающие контакты первого и второго реле соединены с шиной логической единицы, выход элемента ИЛИ-НЕ подключен к обмотке третьего реле,, выход блока j-ie- инейности типа ограничение через первый развязьгеающий диод подключен к обмотке первого реле, обмотка второго реле через второй развязывающий диод . соединена с выходом блока непинейно- сти типа ограничение, выход которого подключен к вькоду блока формирования угла поворота ротора, выход первого апериодического звен а соединен с входом инвертора, выход которого через первый замыкающий контакт третьего реле подключен к входу установки начальньЕХ условий интегратора первого блока моделирования электромагнитных процессов, вход второго апериодического звена, через второй замыкающий контакт третьего реле соединен с входом установки начальных условий интегратора второго блока моделирования .электромагнитных процессов и с первым входом первого апериодического звена, второй вход которого и вход второго апериодического эвена подключены к выходу инте.гратора первого блока моделирования электромагнитных процессов 5 к четвертому входу суммирующего усилителя второго блока моделирования электромагнитных процессов и через последовательно соединенные первый элемент с.односторонней провод1-1мостью® и первый ключевой элемент подключен к четвертому входу
суммирующего ус1-шителя первого блока моделирования электромагнитных процессов, соединенного через последовательно соединенные второй ключевой элемент и второй элемент с односторонней проводимостью с выходом интегратора первого блока моделирования электромагнитных процессов, выход второго интегратора второго блока моделирования электромагнитных процессов через последовательно соединенные третий элемент с односторонней проводимостью и трет.ий ключевой элемент соединен с пятым входом суммирующего усилителя, соединенного через последовательно соединенные четвертый ключевой элемент и четвертый элемент с односторонней проводимостью с выходом интегратора второго блока моделирования электромагнитных процессов,подключенного к первому входу первого апериодического звена блока формирования начальных значений токов на границе тактов коммутации и к пятому входу суммирующего усилителя первого блока моделирования электромагнитных процессов, шестой вход которого соединен с выходом суммирующего усилителя второго блока моделирования электромагнитных процессов, выход суммирующего усилителя первого блока моделирования электромагнитных процессов подключен к шестому входу суммирующего усилителя второго блока моделирования электромагнитных процессов.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1989 |
|
SU1681315A1 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
| Устройство для моделирования процессов наполнения и опорожнения тормозной магистрали железнодорожного подвижного состава | 1989 |
|
SU1734107A2 |
| Устройство для моделирования м-фазного вентильного преобразователя | 1974 |
|
SU524200A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1988 |
|
SU1594569A1 |
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
| Устройство для моделирования электромагнитных процессов в индукторных машинах | 1977 |
|
SU729599A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для моделирования процессов наполнения и опорожнения тормозной магистрали железнодорожного подвижного состава | 1985 |
|
SU1277151A1 |

Изобретение относится-к аналоговой вычислительной технике и предназначено для моделирования электромагнитных и электромеханических процессов в вентильном электродвигателе (ВД) с обмоткой якоря (ОЯ), секции которого соединены, в звезду (лучевая обмотка).
Цель изобретения - повьшение точности за счет учета коммутационнык процессов.
На фиг. 1 представлена структурная схема устройства для модехгирования ВД на фиг. 2 - функциональная схема
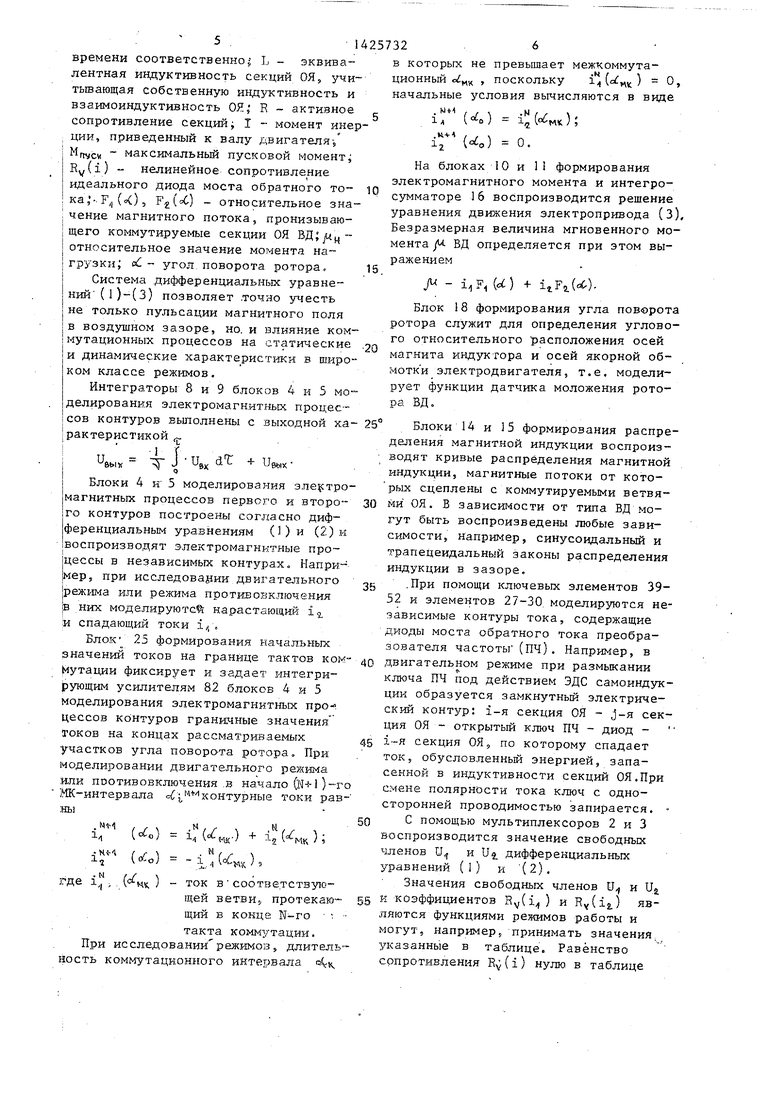
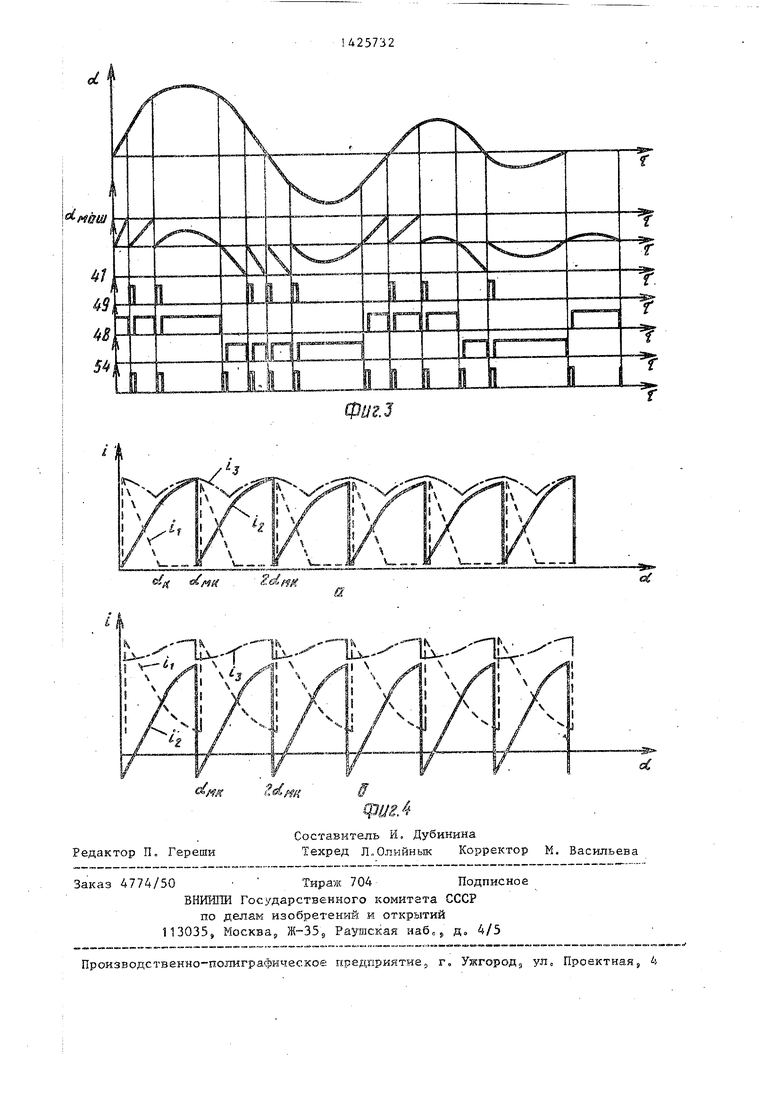
устройства; на фиг, 3 - диаграммы напряжений в узлах функциональной схемы; на фиг, 4 - диаграммы напряжений на выходе блоков моделирования электромагнитных процессов первого и второго контуров при работе ВД в двигательном режиме: (а) мк б) при мк коммутационный интервал, мк - межкоммутацион- ньш интервал),
Устройство для моделирования ВД содержит двухполярньгй источник 1 напряжения, два мультиплексора 2 и 3,
31425732
4 и 5 моделирования блектромаг- го интервала процессов первого и второго ов, выполненные в виде последовает от положит нала на входе сх Блок 25 форми значений токов мутации содержи 55 с двумя вход щий усилитель 5 зисторы 60, разм реле 62, второе 63, включающее сатор 65, .резис щий контакт 67
вательно соединенных суммирующего усиРеле 52 срабатывает от положительного суммарного си1- нала на входе схемы 54 сравнения. Блок 25 формирования начальных значений токов на границе тактов коммутации содержит апериодическое звено 55 с двумя входами 56 и 57, включающий усилитель 58, конденсатор 59, резисторы 60, размыкающие контакты 61 . реле 62, второе апериодическое звено 63, включающее усилитель 64, конденсатор 65, .резисторы 66, размыкающий контакт 67 реле 62, инвертор 68
ле 62, блок 72 нелинейности типа ограничение, реле 73 и 74 с разомкнутыми контактами 75 и 76 соответлителя 6(7) и интегратора 8(9) каж- ный, два блока 10 и 11 формирования электромагнитного момента два блока 12 и 13 формирования ЭДС вращения, два блока 14 и 15 формирования рас- ю пределения магнитной индукции, ин- тегросумматор 16, блок 17 задания момента нагрузки, блок 18 формирования ;, угла поворота ротора, входы 19-24 суммирующих усилителей 6 и 7, блок 25 .15 с резисторами 69. Блок 25 также вклю- формирования начальных значений токов чает амьшающие контакты 70 и 71 ре- на границе тактов коммутации, блок 26 вьщеления модуля, элементы 27-30 . с односторонней проводимостью, входы 31-34 суммирующих усилителей, вхо-20 ственно, развязывающие диоды 77 и 78 ды 35 и 36 установки начальных уело- и элемент ИЛИ-НЕ 79. На фиг. 2 структура блоков 4 и 5 идентична и каждый из них включает ускпители 80-82. конденсатор 83, резисторы 84, контакты 25 85 реле 86.
Система, дифференциальных уравнений, описывающая возможные электротеристики ( / ТГ магнитные состояния ВД, состоит из
уравнений с дискретно изменяемыми 30 на каждом такте коммутации свободными членами и коэффициентами, конкретные значения которых определя- , ются либо естественным режимом ра- боты, либо режимом управления, либо дс аварийным режимом, Учитьгаая то, что индукт1-ш.ые параметры секции ОЯ расвий интеграторов 8 и 9, входы 37 и 38 суммирующих усилителей и ключевые элементы 39-42.
Блоки 14 и 15 распределения магнитной индукции реализованы на блоках нелинейности и имеют выходные харакF,M г COsdcfi ,
дп
Рл (оС) - cos(KI - )
2т
На них воспроизводится в данном конкретном случае синусоидальное распределение индукции в воздушном зазоре,,
Блок 17 задания момента нагрузки вьшолнен с выходной характеристикой ,(Ь1.ц const при и) var и реализован ha источнике постоянного напряжения.
Блоки 12 и 13 формирования ЭДС вращения и блоки 10 и 11 формирования электромагнитного момента реализованы на блоках умножения двух переменных. Блок 26 вьзделения модуля построен на усилителе 43 с резисторами 44 и 45 и двух диодах 46 и 47.
Блок 18 формирования угла поворота ротора вьшолнен по схеме генератора пилообразных напряжений и включает усилитель 48,конденсатор 49 резистор 50,контакт 51 и реле 52«
Во избежание дублирования по функциональному назначению блоков для по- . лучения модуля сигнала (оС , поступающего на управляющий вход 53 схемы 54 сравнения, используется блок 26 выделения модуля. На второй вход схемы 54 сравнения подается опорное напряжение U, пропорциональное угловой длительности межкоммутационносматриваемых БД практически не зависят от угла поворота ротора, эта система уравнений, записанная в от- 40 носительных единицах, дополненная дифференциальным.уравнением движения, имеет вид
45
I. o.5-)-5e 0-5 i. R.iJi, +-)П {.().« и, KD
50
55
..l + i t 0, + 0,5, Ij R,(i,,)ii . UjK2
i.F. w -b i.F,() -j«, h -| -(3)
Символы с индексами I и 2 относятся соответственно к первому отключенному и второму подключенному независимым контурам, i, и - относительные значения токов и напряжения питания J A}(jt ,и),( - безразмерное время, относительная и идеальная частоты вращения, hi4/R,h Iu5 nvjcn - о г °сительные электромагнитная и электромеханическая постоянные
го интервала
Реле 52 срабатывает от положительного суммарного си1- нала на входе схемы 54 сравнения. Блок 25 формирования начальных значений токов на границе тактов коммутации содержит апериодическое звено 55 с двумя входами 56 и 57, включающий усилитель 58, конденсатор 59, резисторы 60, размыкающие контакты 61 . реле 62, второе апериодическое звено 63, включающее усилитель 64, конденсатор 65, .резисторы 66, размыкающий контакт 67 реле 62, инвертор 68
с резисторами 69. Блок 25 также вклю- чает амьшающие контакты 70 и 71 ре- ственно, развязывающие диоды 77 и 78 и элемент ИЛИ-НЕ 79. На фиг. 2 структура блоков 4 и 5 идентична и каждый из них включает ускпители 80-82. конденсатор 83, резисторы 84, контакты 85 реле 86.
ле 62, блок 72 нелинейности типа ограничение, реле 73 и 74 с разомкнутыми контактами 75 и 76 соответс резисторами 69. Блок 25 также вклю- чает амьшающие контакты 70 и 71 ре- ственно, развязывающие диоды 77 и 78 и элемент ИЛИ-НЕ 79. На фиг. 2 структура блоков 4 и 5 идентична и каждый из них включает ускпители 80-82. конденсатор 83, резисторы 84, контакты 85 реле 86.
сматриваемых БД практически не зависят от угла поворота ротора, эта система уравнений, записанная в от- носительных единицах, дополненная дифференциальным.уравнением движения, имеет вид
45
I. o.5-)-5e 0-5 i. R.iJi, +-)П {.().« и, KD
50
55
..l + i t 0, + 0,5, Ij R,(i,,)ii . UjK2)
i.F. w -b i.F,() -j«, h -| -(3)
Символы с индексами I и 2 относятся соответственно к первому отключенному и второму подключенному независимым контурам, i, и - относительные значения токов и напряжения питания J A}(jt ,и),( - безразмерное время, относительная и идеальная частоты вращения, hi4/R,h Iu5 nvjcn - о г °сительные электромагнитная и электромеханическая постоянные
времени соответственно L - эквивалентная индуктивность секций ОЯ, учи- тьгоающая собственную индуктивность и взаимоиндуктивность ОЯ; R - активное сопротивление секций; I - момент инерции, приведенный к валу двигателя-, Mftvcvi максимальный пусковой момент; (i) - нелинейное сопротивление идеального диода моста обратного то- ig ка,;-. F,| (о(), ) - относительное зна- чение магнитного потока, пронизывающего коммутируемые секции ОЯ ВД;/4ц- относительное значение момента нагрузки; угол, поворота ротора. 15.
Система дифференциальных уравнений (1)-(3) позволяет .точно учесть не только пульсации магнитного поля в воздушном зазоре, но. и влияние коммутационных процессов на статические .Q и динамичес.кие характеристики в широком классе режимов.
Интеграторы 8 и 9 блоков 4 и 5 моделирования электромагнитных процессов контуров выполнены с выходной ха- 25 рактеристикой
1и,
бык
и,, dT
f и
вых
Блоки 4 К 5 моделирования эле|:тро магнитных процессов первого и второ- |го контуров построены согласно диф- ференциальньгм уравнениям () и (2) н воспроизводят электромагнитные про- |цессы в независимых контурах- Напри|мер, при исследова41ни двигательного режима или режима противовключения JB них моделируются нарастающий ij, и спадающий токи 1
Бло.к 25 формирования начальных значений токов на границе тактов ком Иутации фиксирует и задает интегрирующим усилителям 82 блоков 4 и 5 моделирования электромагнитных про-, цессов кьнтуров гранинные значения ГОКОВ на концах рассматриваемых участков угла поворота ротора При моделировании двигательного режима
. ИЛИ поотивовключения .в начало (W-i-i)-т МК-интервала oi i контурные токи равны
м , /- , ,W / ,. ., () +
(-.у- -%
. M-t-1
()
где
Н«-1
. ы
(о (
)
ток в соответствующей ветви,, протекающий в конце N-ro
такта коммутации.
При исследований режимов, длительность коммутационного интервала 4гк
в которых не превышает межкоммута- ционньй , поскольку i(.)
wv: начальные условия вычисляются в
. rv .- 1, (oio) 1
.и-и / /
1, (
ви
(о) i(); 0.
Q
5
0
5
0
0
На блоках 10 и 1 формирования электромагнитного момента и интегро- сумматоре 16 воспроизводится решение уравнения движения электропривода (З), Безразмерная величина мгновенного момента /W. ВД определяется при этом выражением
/ - ) -ь iiF,,().
Блок 8 формирования угла поворота ротора служит для определения углового относительного расположения осей магнита индуктора и осей якорной обмотки электродвигателя, т.е. моделирует функции датчика моложения ротора ВД.
Блоки 14 и 55 формирования распределения магнит.ной индукции воспроизводят кривые распределения магнитной индукции, магнитные потоки от кото- рых сцеплены с коммутируемыми ветвями ОЯ. В зависимости от типа БД могут быть воспроизведены любые зависимости, например, синусоидальный и трапецеидальный законы распределения индукции в зазоре.
.При помощи ключевых элементов 39- 52 и элементов 27-30. моделируются независимые контуры тока, содержащие диоды моста обратного тока преобразователя Частоты (ПЧ). Например, в двигательном режиме при размыкании ключа ПЧ под действием ЭДС самоиндукции образуется замкнутный электрический контур: i-я секция ОЯ j-я секция ОЯ - открытый ключ ПЧ - диод - i-я секция ОЯ, по которому спадает ток, обусловленньм энергией, запасенной в индуктивности секций ОЯ.При смене полярности тока ключ с односторонней проводимостью запирается.
С помощью мультиплексоров 2 и 3 воспроизводится значение свободных
членов и и Uj. дифференциальных уравнений (i) н (2).
Значения свободных членов U и U 55 к коэффициентов R(i ) и Ry(i2.) являются функциями режимов работы и могут, например, принимать значения указанные в таблице. Равенство сопротивления RV(i) нулю в таблице
7
говорит об отсутствии диода в контуре, а равенство бесконечности - об отсутствии тока в соответствующем контуре. Принятые в таблице сокращения режимов работы: ДТ - динамческое торможение, ДВ - двигательны О - отключения, НВ - противовключе- ния.
Рассмотрим работу устройства для моделирования ВД на конкретном примере (фиг. 2), например, при исследовании двигательного режима.
Согласно таблице необходимо предварительно установить следующие значения: и 0; Uj + Uuit . 1 J Ry(i) прямое вклю 1ение , Rv(,) - отсутствует. Для этого замыкают ключевой элемент 39. На вход 22 блока 5 моделирования электромагнитных процессов второго контура подают напряжение , пропорциональное напряжению питания ВД. Для этого выставляют соответствующий код на входах управления мультиплексора 3. На вход 21 блока 4 подают нулевое напряжение.
При поступлении напряжения питания на вход 22 блока 5 моделирования электромагнитных процессов на выходе указанного блока появляется ток ij, который,поступая на блок II формирования электромагнитного момента/ создает вращающий момент двигателя (oC) ток i при этом отсутствует. Вращающий момент, суммируясь с моментом нагрузки на интегросум- маторе 16, преобразуется в скорость двигателям, которая, действуя на блок 18 формирования угла поворота ротора, превращается в угол поворота ротора , квантованный на отрезкис мк- ST/m, равные межкоммутационному интервалу. На выходе блока 18 получается пило10 тизной линейного участка кривой бл ка 72 нелинейности типа ограниче ние и выбирается из условия обес чения требуемой точности исследов ния процессов ВД. При наличии им15 пульса на выходе элемента ИЛИ-НЕ обмотки реле 62 и 86 оказьшаются п ключенными к источнику питания. Р мыкаются контакты 61 и 67 и замык ся контакты 70 и 71 реле 62, обес
20 чивая поступление на входы 35 и 3 ввода начальных условий интеграто 8 и 9 начальных значений токов .i и 1г(в) согласно вьфажениям для моделирования следующего такт
25 коммутации. При поступлении управ щего сигнала на вход реле 86 с по щью его контактов 85 происходит б рая перезарядка конденсатора 83 и тегратора до значения напряжения,
30 даваемого на его вход. При снятии жима задания начальных условий ст тура интегратора перестраивается исходной.
На втором МК-интервале и на по
2(- дующих в процессе формирования эл тромагнитного момента участвуют о |блока 4 и, 5 моделирования электром нитных процессов контуров. Блок 4
целирует контур со спадающим током
м tit /
40 Ток 1,, спадает со значения
если до конца (N + 1)- го МК-интер ла он успевает спасть до нуля, при смене его знака размыкается ключев элемент 39 и ток обратной полярно
может.
образный сигнал .i (фиг. 3), кото-„тт
«-маш v /. 1 v g реальном ВД, протекать не
рыи, поступая на блоки 14 и 15 форми- ,,„„ рования распределения магнитной индукции, создает на их выходе функции распределения магнитной индукции
Графики токов i , i и ij 1л лри квазиустановившемся режиме ра 50 ВД для случаев, когда а: ° и
,м
COS
( -i);
гМ cos ( - Ж),
аи
которые затем поступают на блоки фор мирования ЭДС вращения 12 и 13 и эле ктромаглитного момента 10 и 11 совместно с сигналами м) и .-С формируют линейные ЭДС вращения е . (.} и
8
электромагнитные моменты контуров i . Как ТОЛЬКО ; О и 0, сигналы е, е начинают участвовать в формировании токов i, ij.
В конце каждого МК-интервала «Смк на выходе элементе ИЛИ-НЕ 79 формируется короткий импульс (фиг. 3)j длительность которого определяется крутизной линейного участка кривой блока 72 нелинейности типа ограничение и выбирается из условия обеспечения требуемой точности исследования процессов ВД. При наличии импульса на выходе элемента ИЛИ-НЕ 79 обмотки реле 62 и 86 оказьшаются подключенными к источнику питания. Размыкаются контакты 61 и 67 и замыкают ся контакты 70 и 71 реле 62, обеспечивая поступление на входы 35 и 36 ввода начальных условий интеграторов 8 и 9 начальных значений токов .i («fj) и 1г(в) согласно вьфажениям для моделирования следующего такта
коммутации. При поступлении управляющего сигнала на вход реле 86 с поют- щью его контактов 85 происходит быстрая перезарядка конденсатора 83 интегратора до значения напряжения, по-
даваемого на его вход. При снятии жима задания начальных условий структура интегратора перестраивается к исходной.
На втором МК-интервале и на последующих в процессе формирования электромагнитного момента участвуют оба |блока 4 и, 5 моделирования электромагнитных процессов контуров. Блок 4 моцелирует контур со спадающим током.
м tit / ч
Ток 1,, спадает со значения )9
если до конца (N + 1)- го МК-интервала он успевает спасть до нуля, при смене его знака размыкается ключевой элемент 39 и ток обратной полярности,
„тт
может.
,,„„
,,„„
Графики токов i , i и ij 1л + i e, лри квазиустановившемся режиме работы 50 ВД для случаев, когда а: ° и
. представлены на фиг. 4а,б.
Для моделирования режима динамического торможения необходимо устано- 55 вить следующие значения: U 1 у
Ui 0, E(i) и Bydj,) - обратное включение. Для этого замыкаются ключевые элементы 40 и 42. На вход 21 блока 4 моделирования электромагнит 91425732 .10
ных процессов первого контура подает- Аналогичным .образом могут быть ся напряжение U,j 1. На вход/. 22 бло- смоделированы любые другие режимы, ка 5 подается нулевое напряжение. данные о которых приведены в таблице, Устройство для моделирования работает например переход от режима динами- при этом аналогичным образом,,ческого торможения к двигательному
и наоборот.
«SJ
cL I
d
мвш
s f4K . ,
fl
к --IK
дд- Т j
M
Редактор По Гереши
Составитель И. Дубинина Техред Л.Олийнык Корректор М. Васильева
| Дунаевский С | |||
| Я | |||
| и др.Моделирование элементов электромеханических систем | |||
| -И.: Энергия, 1971,, с; 171, Авторское свидетельство СССР № 1035 б18, 1980. |
