d
ел
(X)
|
сд
4
00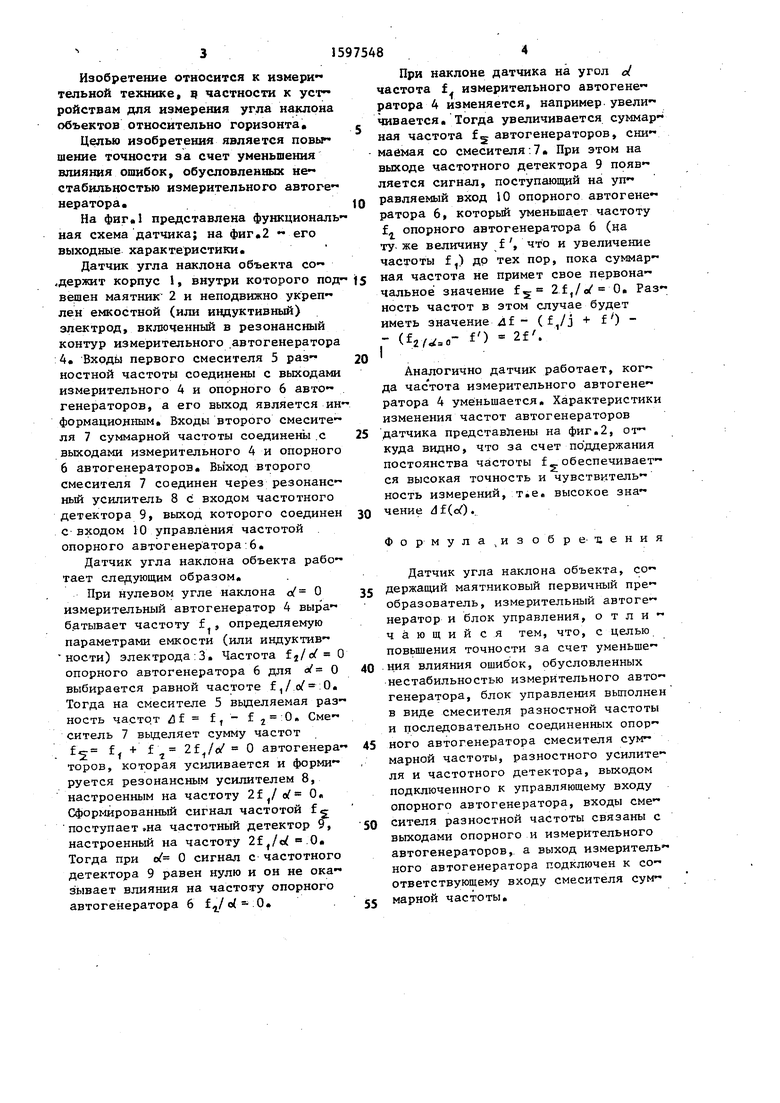
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения емкости диэлектриков | 1980 |
|
SU938202A1 |
| Автогенераторный многопараметрический измеритель | 1980 |
|
SU911287A1 |
| Автогенераторный диэлькометрический измеритель | 1980 |
|
SU868634A1 |
| Широкополосный измеритель параметров диэлектриков | 1983 |
|
SU1109670A1 |
| Диэлькометрический измеритель концентрации пластификатора в пленочных материалах | 1982 |
|
SU1081566A1 |
| Способ определения резонанса измерительной цепи и устройство для его осуществления | 1990 |
|
SU1725161A1 |
| Устройство для контроля многослойных диэлектриков | 1983 |
|
SU1095101A1 |
| Измерительное устройство для частотного пьезорезонансного датчика | 1981 |
|
SU970265A1 |
| Пьезоэлектрический анализатор состава жидкостей и газов | 1982 |
|
SU1040385A1 |
| Частотный измерительный преобразователь | 1981 |
|
SU972263A1 |
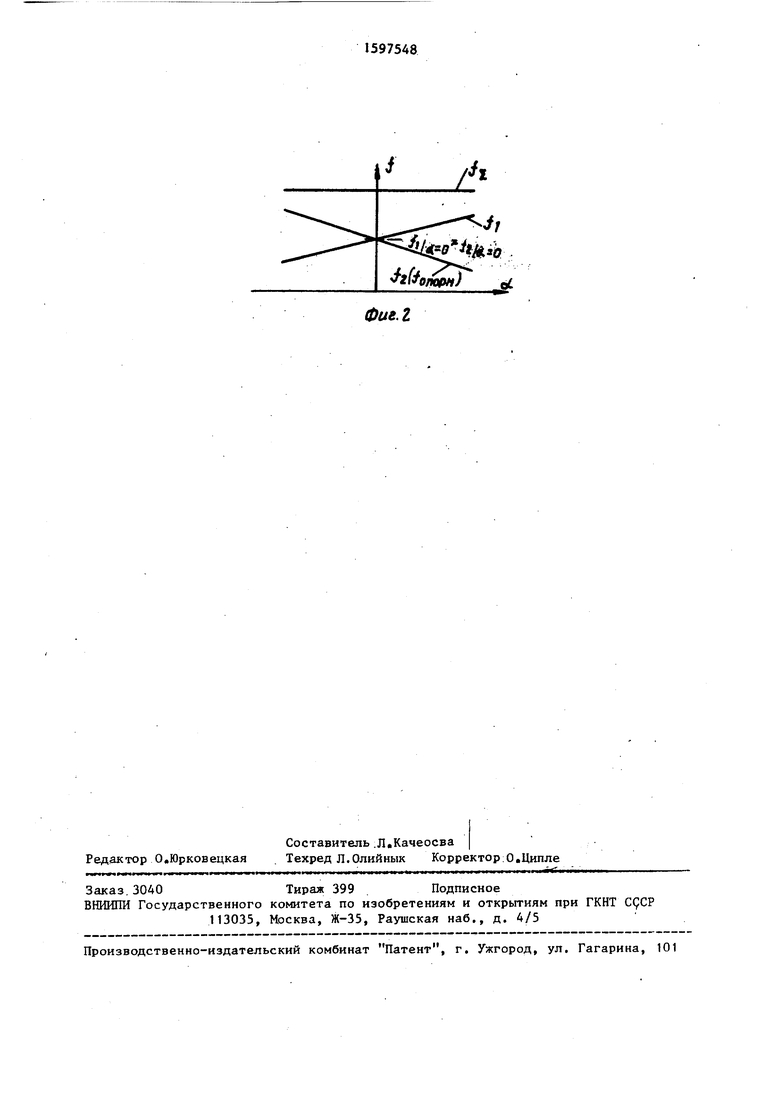
Изобретение относится к измерительной технике, в частности к средствам определения углов наклона объектов. Целью изобретения является повышение точности измерений. Устройство содержит корпус 1, в котором подвешен маятник 2 и неподвижно укреплен емкостной или индуктивный электрод 3, включенный в контур измерительного автогенератора 4, частота которого смешивается с частотой опорного автогенератора 6 и выделяется их разность. 2 ил.
Фиг,1
Изобретение относится к измерительной технике, ц частности к уст ройствам для измерения угла наклона объектов относительно горизонта.
Целью изобретения является повы шение точности за счет уменьшения влияния ошибок, обусловленных не стабильностью измерительного автоге нератора.
На фигв представлена функциональ ная схема датчика; на фиг«2 его выходные характеристики.
Датчик угла наклона объекта со- .держит корпус 1, внутри которого под- вешен маятник 2 и неподвижно укреплен емкостной (или индуктивный) электрод, включенный в резонансный контур измерительного автогенератора 4, Входы первого смесителя 5 раз- ностной частоты соединены с выходами измерительного 4 и опорного 6 авто- генераторов, а его выход является информационным. Входы второго смесителя 7 суммарной частоты соединень .с выходами измерительного 4 и опорного 6 автогенераторов, Вы ход второго смесителя 7 соединен через резонансный усилитель 8 С входом частотного детектора 9, выход которого соединен с входом 10 управления частотой опорного автогенератора 6,
Датчик угла наклона объекта работает следующим образом
При нулевом угле наклона с( О измерительный автогенератор 4 вырабатывает частоту f, определяемую параметрами емкости (или индуктив- кости) электрода:3. Частота fj/c/ 0 опорного автогенератора 6 для выбирается равной частоте О Тогда на смесителе 5 выделяемая разность частот f. f,- f 2 О Смеситель 7 выделяет сумму частот f f + f ; О автогенераторов, которая усиливается и формируется резонансным усилителем 8, настроенным на частоту (- 0« Сформированный сигнал частотой поступает .на частотный детектор 9, настроенный на частоту 0, Тогда при 0 О сигнал с частотного детектора 9 равен нулю и он не оказывает влияния на частоту опорного автогенератора 6 (:0.
При наклоне датчика на угол о1 частота f. измерительного автогенератора 4 изменяется, например увеличивается. Тогда увеличивается суммарная частота f автогенераторов, снимаемая со смесителя:7, При этом на выходе частотного детектора 9 появляется сигнал, поступающий на управляемый вход 10 опорного автогенератора 6, которьй уменьшает частоту f- опорного автогенератора 6 (на ту-же величину f, что и увеличение частоты f,) до тех пор, пока суммарная частота не примет свое первоначальное значение 2f,, Разность частот в зтом случае будет иметь значение 4f - ( f ,/j + fO - (f2/.-a- f) 2f .
Аналогично датчик работает, когда час тота измерительного автогенератора 4 уменьшается. Характеристики изменения частот автогенераторов датчика представлены на фиг.2, откуда видно, что за счет поддержания постоянства частоты f обеспечивается высокая точность и чувствительность измерений, т.е. высокое значение d f (о)..
Формула изобреъения
Датчик угла наклона объекта, содержащий маятниковый первичный преобразователь, измерительный автогенератор и блок управления, отличающийся тем, что, с целью повышения точности за счет уменьше- .ния влияния ошибок, обусловленных .нестабильностью измерительного автогенератора, блок управления выполнен в виде смесителя разностной частоты и последовательно соединенных опорного автогенератора смесителя суммарной частоты, разностного усилителя и частотного детектора, выходом подключенного к управляющему входу опорного автогенератора, входы смесителя разностной частоты связаны с выходами опорного и измерительного автогенераторов, а выход измерительного автогенератора подключен к соответствующему входу смесителя суммарной частоты.
Фиг.1
| Новицкий П.в | |||
| и др | |||
| Цифровые приборы с частотными датчиками | |||
| - Л.: Энергия, 1970, с | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
| Датчик углового наклона объектов | 1984 |
|
SU1210056A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
