Фиг. 1
Изобретение относится к контрольно- измерительной технике и может быть использовано в системах технического зрения, в частности, в аппаратуре бесконтактного контроля плоской поверхности металлических объектов кольцевой формы для выявления в них литьевых раковин, вмятин, забоин и т.д.
Целью изобретения является повышение производительности измерения координат поверхности изделия кольцевой формы за счет одновременного контроля противоположных поверхностей объекта.
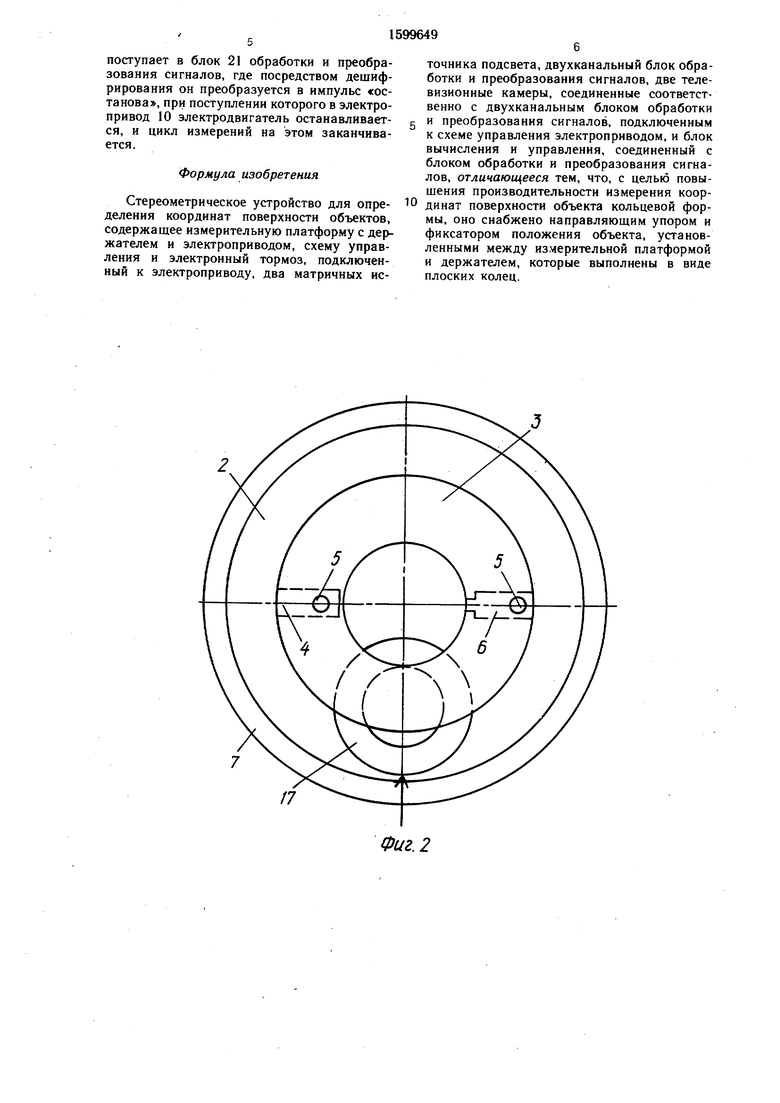
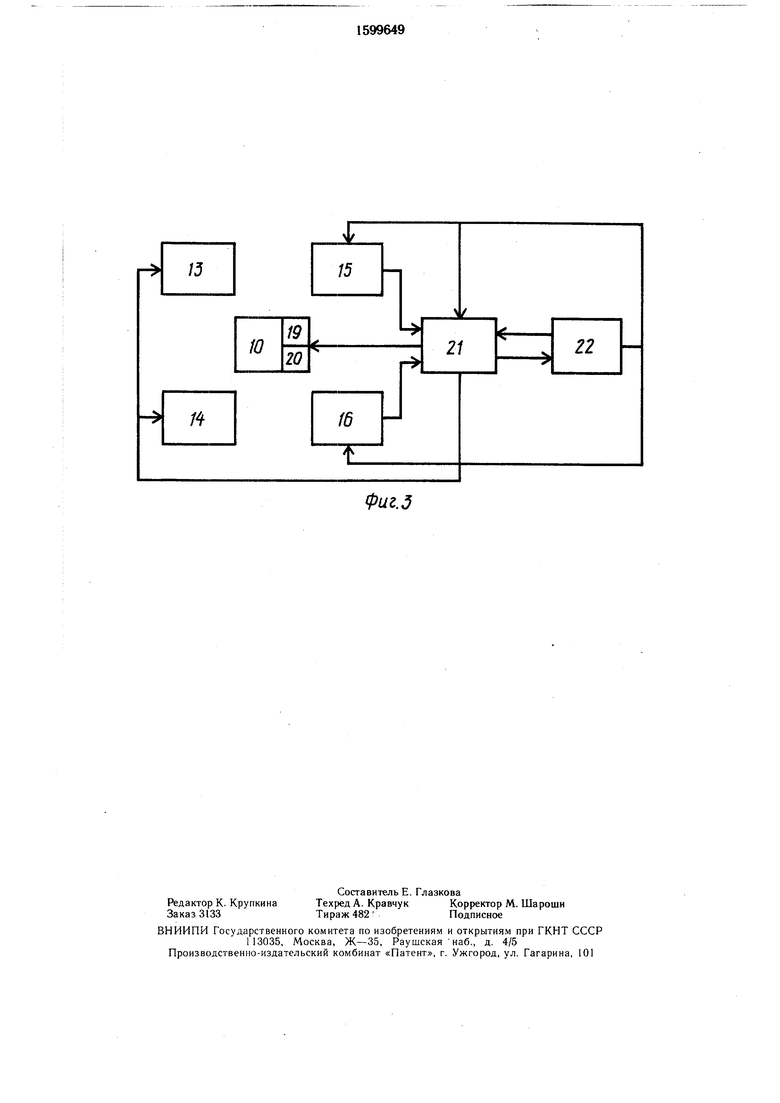
На фиг. 1 представлена конструкция механической части устройства; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - блок-схема устройства.
Устройство содержит металлический корпус 1, измерительную платформу 2, держатель 3, направляющий упор 4, винт 5 с прижимными пружинами, фиксатор 6, зубчатый бандаж 7 в виде зубчатого колеса, надетого на измерительную платформу, шестерню 8 редуктора, опору 9 качения, электропривод 10, стойку 11, горизонтальную направляющую 12, матричные источники 13 и 14 под- . света, телевизионные камеры 15 и 16 для приема изображения, заготовки кольца 17. Источники 13 и 14 подсвета находятся в изолирующем кожухе 18. Устройство содержит также схему 19 управления и электронный тормоз 20, блок 21 обработки и преобразования сигналов, блок 22 вычисления и управления.
Устройство работает следующим образом.
Заготовки кольца 17 поштучно подаются в щель между поверхностью измерительной платформы 2 и держателем 3 и автоматически проталкиваются толкателем транспортирующего устройства на базовую поверхность в виде круга в центре платформы. При перемещении в прямом направлении заготовка точно устанавливается на определенном месте базовой поверхности за счет фиксирования конечного положения толкателя при его выдвижении. А при отклонении заготовки в сторону траектория перемещения загоховки корректируется слева - направляющим упором 4, а справа -- фиксатором 6.
При подаче питающего напряжения в стереометрическое устройство с таймера блока 22 в блок 21 обработки и преобразования сигналов в блок развертки сигналов изображения телевизионных камер 15 и 16 на чинают поступать тактовые импульсы, обеспечивающие синхронизацию работы стереометрического устройства. Управление процессом измерений осуществляется от блока 22, работающего по заранее составленной программе.
По команде программы измерений «Пуск от блока 22 в блок 21 обработки и преобразования Сигналов поступает код, ко
торый в результате дешифрирования в блоке 21 преобразуется в импульс запуска, посту- -пающий в схему управления электроприводом, и электродвигатель электропривода 10
приводится во вращательное движение, которое через редуктор передается на измерительную платформу 2 с размещенной на ней заготовкой кольца 17.
По истечении переходного процесса в электроприводе устанавливается постоянная скорость вращения измерительной платформы, а с блока 22 в этот момент времени подается команда «Измерение, код которой с устройства вывода блока 22 поступает в блок 21 обработки и преобразования сигналов. Там он дешифрируется и по импульсам с дешифратора все счетные элементы в блоке развертки сигналов телевизионных камер 15 и 16, а также в блоке 21 обработки и преобразования сигналов приводятся в исходное нулевое состояние, и после этого автоматически начинается процесс стерео- измерений поверхности плоского объекта кольцевой формы.
По видеосигналам развертки строки в блоке 21 обработки и преобразования видеосигналов формируется стробирующий импульс сигнала строки, длительность которого равна активной длительности сигнала строки. При поступлении стробирующих импульсов строк и тактовых импульсов с таймера блока 22 на схему совпадения в блоке 21 обработки и преобразования сигналов в нем формируются измерительные импульсы, по которым высвечиваются элементарные излучатели источника подсвета, а также стробируются видеосигналы с отсутствием линейного параллакса.
По импульсам с отсутствием линейного параллакса в блоке 21 обработки и преобразования видеосигналов формируются интервал-импульсы, при поступлении которых на схему импульсного кодирования выдаются коды координат дефектной поверхности объекта, например, коды координат контуров литьевых раковин.
Измерение координат поверхности объекта кольцевой формы осуществляется в цикле измерений, при котором объект измерений
поворачивается на 360° вместе с измерительной платформой. Так как усредненная величина параметра заготовок имеет постоянную величину, то количество сканирований объекта в цикле измерений может быть определено заранее и заложено в память блока 22.
По результатам учета текущего количества сканирований в цикле измерений блок 22 выносит решение об окончании измерений в момент равенства числа текущего сканирования заданному числу сканирований в
цикле измерений.
По окончании измерений блок 22 выдает код, который с устройства вывода блока 22
поступает в блок 21 обработки и преобразования сигналов, где посредством дешифрирования он преобразуется в импульс «останова, при поступлении которого в электроточника подсвета, двухканальный блок обработки и преобразования сигналов, две телевизионные камеры, соединенные соответственно с двухканальным блоком обработки
привод 10 электродвигатель останавливает- и преобразования сигналов, подключенным ся, и цикл измерений на этом заканчивается.
к схеме управления электроприводом, и блок вычисления и управления, соединенный с блоком обработки и преобразования сигналов, отличающееся тем, что, с целью повы- шения производительности измерения коор- Стереометрическое устройство для опре- Ю динат поверхности объекта кольцевой фор OUU irf f r niJItOTIrr rk VVbuvv Л|«...A. г
Формула изобретения
деления координат поверхности объектов, содержащее измерительную платформу с жателем и электроприводом, схему управления и электронный тормоз, подключенный к электроприводу, два матричных исмы, оно снабжено направляющим упором и фиксатором положения объекта, установленными между измерительной платформой и держателем, которые выполнены в виде плоских колец.
точника подсвета, двухканальный блок обработки и преобразования сигналов, две телевизионные камеры, соединенные соответственно с двухканальным блоком обработки
и преобразования сигналов, подключенным
к схеме управления электроприводом, и блок вычисления и управления, соединенный с блоком обработки и преобразования сигналов, отличающееся тем, что, с целью повы- шения производительности измерения коор- динат поверхности объекта кольцевой г
мы, оно снабжено направляющим упором и фиксатором положения объекта, установленными между измерительной платформой и держателем, которые выполнены в виде плоских колец.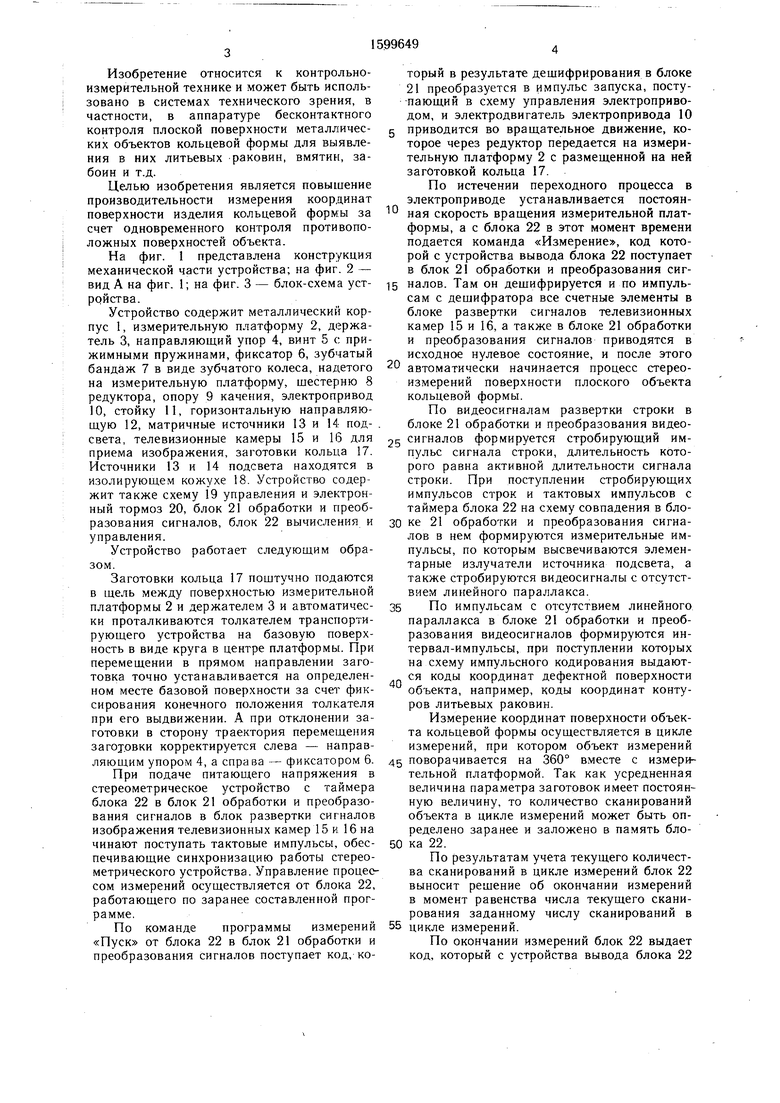
| название | год | авторы | номер документа |
|---|---|---|---|
| Телевизионный способ измерения геометрических размеров объектов кольцевой формы | 1988 |
|
SU1657960A1 |
| Телевизионный способ измерения геометрических размеров крупногабаритных объектов | 1990 |
|
SU1820208A1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ВИДЕОКАМЕР ПРИ ИЗМЕРЕНИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 1993 |
|
RU2082084C1 |
| Стереометрический способ определения координат поверхности объекта | 1987 |
|
SU1490487A1 |
| Устройство для измерения размеров изделий кольцевой формы | 1989 |
|
SU1652820A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| Способ считывания графической информации | 1982 |
|
SU1049935A1 |
| Устройство для измерения размеров объектов кольцевой формы | 1984 |
|
SU1239518A1 |
| Способ обработки графической информации | 1987 |
|
SU1501111A1 |
| Устройство для измерения координат объекта | 1990 |
|
SU1737754A1 |
Изобретение относится к контрольно-измерительной технике. Целью изобретения является повышение производительности измерения координат поверхности объекта кольцевой формы за счет одновременного контроля противоположных поверхностей объекта. Измерительная платформа 2 и держатель 3 выполнены в виде плоских колец. 3 ил.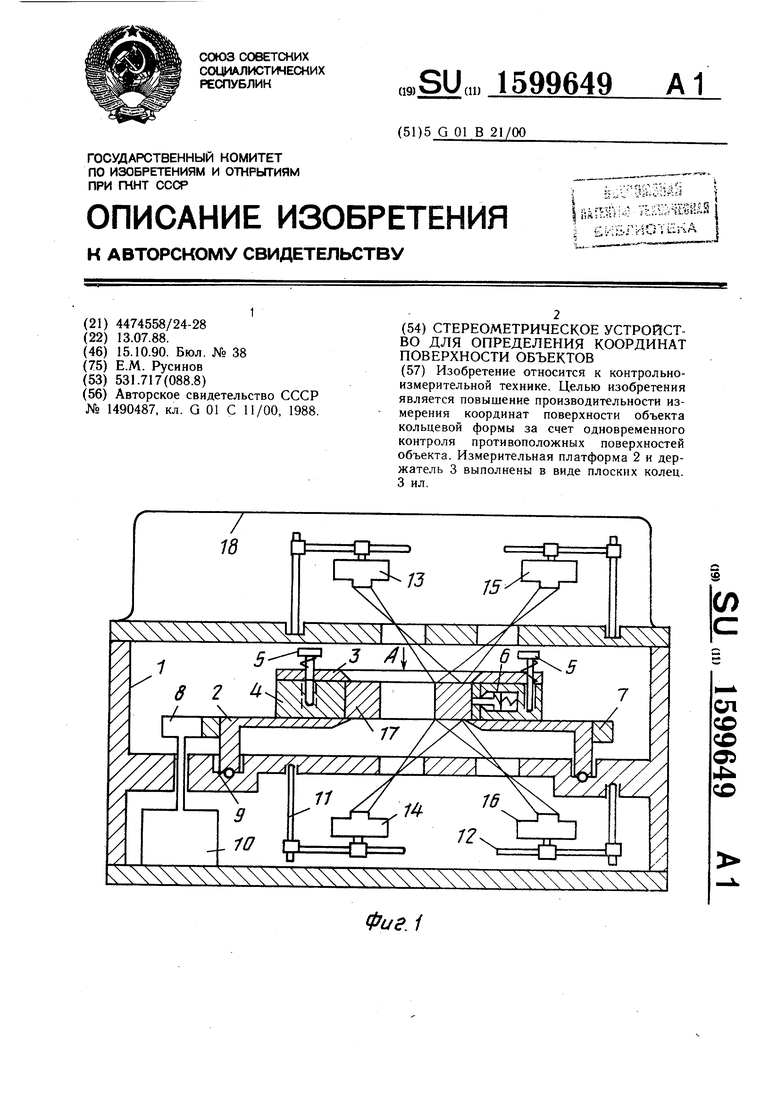
/7
Фиг. 2
Фиг.З
| Стереометрический способ определения координат поверхности объекта | 1987 |
|
SU1490487A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
