1вт ЭВМ
(Л
4
;о
О 4
00
кой поверхности объекта посредством измерительных точек на плановой плоскости, положение которой совпадает с плоской поверхностью объекта, последовательном высвечивании световых лучей в каждой измерительной плоскости, включающей линию 2-А базиса, световые лучи, строку матрицы источника 3 подсвета, злементы которой высвечи
вают лучи данной измерительной плоскости, соответствующую строку матрицы светочувствительного прибора 1. По анализу видеосигналов устанавливается наличие впадин, а координаты каждой измерительной точки впадины определяются по сигналу с неотоб- раженным высвечиванием измерительной точки. 2 ил.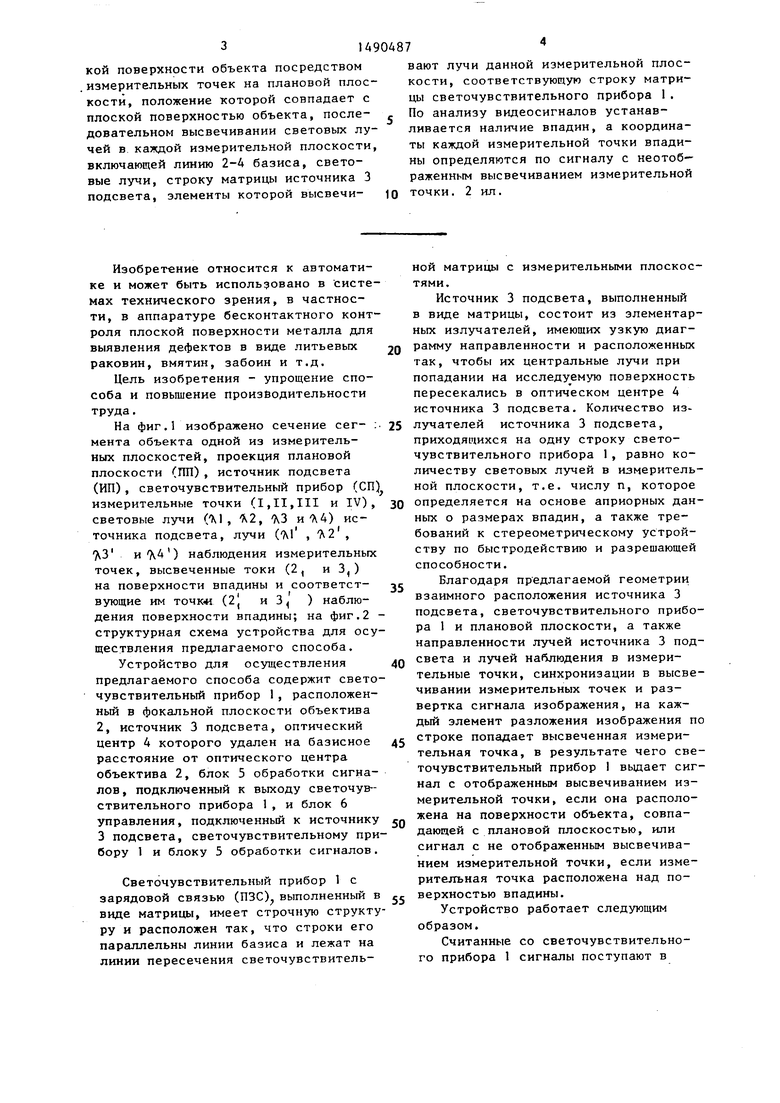
| название | год | авторы | номер документа |
|---|---|---|---|
| Стереометрический способ определения координат поверхности объекта | 1981 |
|
SU979854A1 |
| Способ определения координат поверхности объекта и устройство для его осуществления | 1988 |
|
SU1589055A1 |
| Устройство для отображения графической информации на экране электронно-лучевой трубки | 1986 |
|
SU1374273A1 |
| БЕСКОНТАКТНЫЙ ТРЕХКООРДИНАТНЫЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2191348C2 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1980 |
|
SU930357A1 |
| СПОСОБ ВЗАИМНОЙ КАЛИБРОВКИ ВИДЕОКАМЕРЫ И УСТРОЙСТВА ВЕЕРНОГО ЛАЗЕРНОГО ПОДСВЕТА | 2021 |
|
RU2788666C1 |
| СПОСОБ ИЗМЕРЕНИЯ СПЕКТРАЛЬНЫХ ХАРАКТЕРИСТИК ОТРАЖЕНИЯ ИЛИ ИЗЛУЧЕНИЯ ОБЪЕКТА В ЛЮБОЙ ТОЧКЕ ЕГО ТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ И ВИДЕОСПЕКТРОМЕТР, РЕАЛИЗУЮЩИЙ ЭТОТ СПОСОБ В РЕАЛЬНОМ ИЛИ УСЛОВНОМ МАСШТАБЕ ВРЕМЕНИ | 1997 |
|
RU2140719C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ ОТНОСИТЕЛЬНО ДРУГ ДРУГА | 2002 |
|
RU2244904C2 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 1996 |
|
RU2124700C1 |
| Способ определения пространственных координат точек местности | 1985 |
|
SU1278580A1 |
Изобретение относится к автоматике. Цель изобретения - упрощение способа и повышение производительности труда. Способ заключается в импульсном высвечивании каждой измерительной точки узконаправленным световым лучом, пересекающим линию базиса в одной и той же точке, в определении координат впадин на плоской поверхности объекта посредством измерительных точек на плановой плоскости, положение которой совпадает с плоской поверхностью объекта, последовательном высвечивании световых лучей в каждой измерительной плоскости, включающей линию 2-4 базиса, световые лучи, строку матрицы источника 3 подсвета, элементы которой высвечивают лучи данной измерительной плоскости, соответствующую строку матрицы светочувствительного прибора 1. По анализу видеосигналов устанавливается наличие впадин, а координаты каждой измерительной точки впадины определяются по сигналу с неотображенным высвечиванием измерительной точки. 2 ил.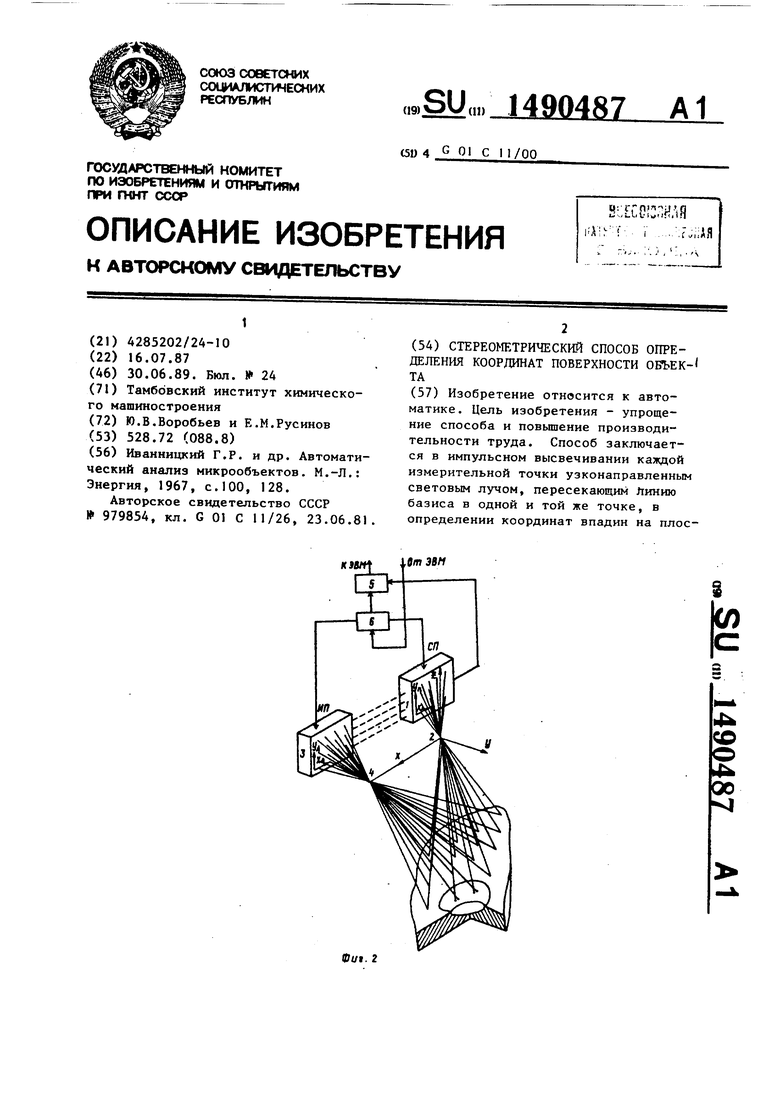
Изобретение относится к автоматике и может быть использовано в системах технического зрения, в частности, в аппаратуре бесконтактного контроля плоской поверхности металла для выявления дефектов в виде литьевых раковин, вмятин, забоин и т.д.
Цель изобретения - упрощение способа и повышение произбодительности труда.
На фиг.1 изображено сечение сег- ; мента объекта одной из измерительных плоскостей, проекция плановой плоскости (ПП), источник подсвета (ИП) , светочувствительный прибор (СП) измерительные точки (1,11,111 и IV), световые лучи СМ , Х2, и Т, 4) источника подсвета, лучи ( М ,,
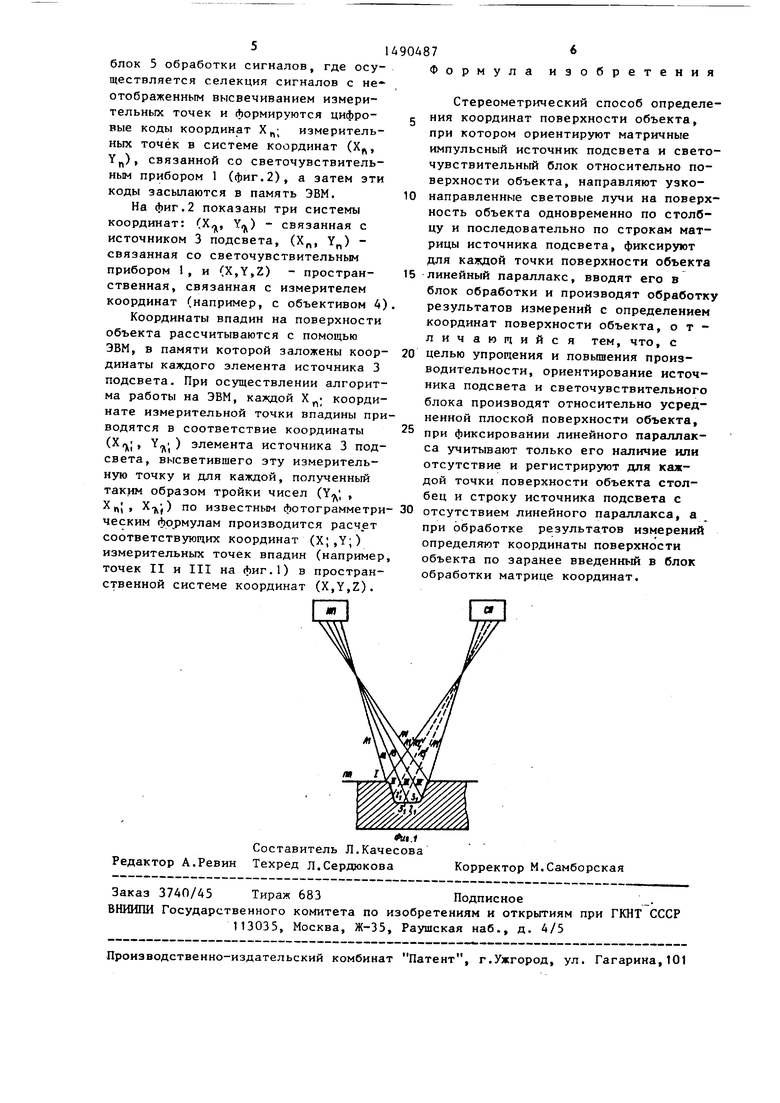
З и ХА ) наблюдения измерительных точек, высвеченные токи (2, и 3, ) на поверхности впадины и соответст- вующие им точк-и (2| и 3 ) наблюдения поверхности впадины; на фиг.2 структурная схема устройства для осуществления предлагаемого способа.
Устройство для осуществления предлагаемого способа содержит светочувствительный прибор 1, расположенный в фокальной плоскости объектива 2, источник 3 подсвета, оптический центр 4 которого удален на базисное расстояние от оптического центра объектива 2, блок 5 обработки сигналов, подключенный к выходу светочувствительного прибора 1, и блок 6 управления, подключенный к источнику 3 подсвета, светочувствительному прибору 1 и блоку 5 обработки сигналов.
Светочувствительный прибор 1 с зарядовой связью (ПЗС) выполненный в виде матрицы, имеет строчную структуру и расположен так, что строки его параллельны линии базиса и лежат на линии пересечения светочувствитель0
5
0
5
0
5
0
ной матрицы с измерительными плоскостями.
Источник 3 подсвета, выполненный в виде матрицы, состоит из злементар- ных излучателей, имеющих узкую диаграмму направленности и расположенных так, чтобы их центральные лучи при попадании на исследуемую поверхность пересекались в оптическом центре 4 источника 3 подсвета. Количество излучателей источника 3 подсвета, приходящихся на одну строку свето- чувствнтельного прибора 1, равно количеству световых лучей в измерительной плоскости, т.е. числу п, которое определяется на основе априорных данных о размерах впадин, а также требований к стереометрическому устройству по быстродействию и разрешающей способности.
Благодаря предлагаемой геометрии взаимного расположения источника 3 подсвета, светочувствительного прибора 1 и плановой плоскости, а также направленности лучей источника 3 подсвета и лучей наблюдения в измерительные точки, синхронизации в высвечивании измерительных точек и развертка сигнала изображения, на каждый злемент разложения изображения по строке попадает высвеченная измерительная точка, в результате чего светочувствительный прибор 1 выдает сигнал с отображенным высвечиванием измерительной точки, если она расположена на поверхности объекта, совпадающей с плановой плоскостью, или сигнал с не отображенным высвечиванием измерительной точки, если измерительная точка расположена над поверхностью впадины.
Устройство работает следующим образом.
Считанные со светочувствительного прибора 1 сигналы поступают в
| Иванмицкий Г.Р | |||
| и др | |||
| Автоматический анализ микрообъектов, М.-Л.: Энергия, 1967, с.100, 128 | |||
| Стереометрический способ определения координат поверхности объекта | 1981 |
|
SU979854A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
