) з(1бретение относится к автоматике и мохет быть использовано при создании устройств для управления подвижными , механизмами , например г елио- ративными, строительными и другими землеройными машинами.
11ель изобретения - повьшение точности контроля I,
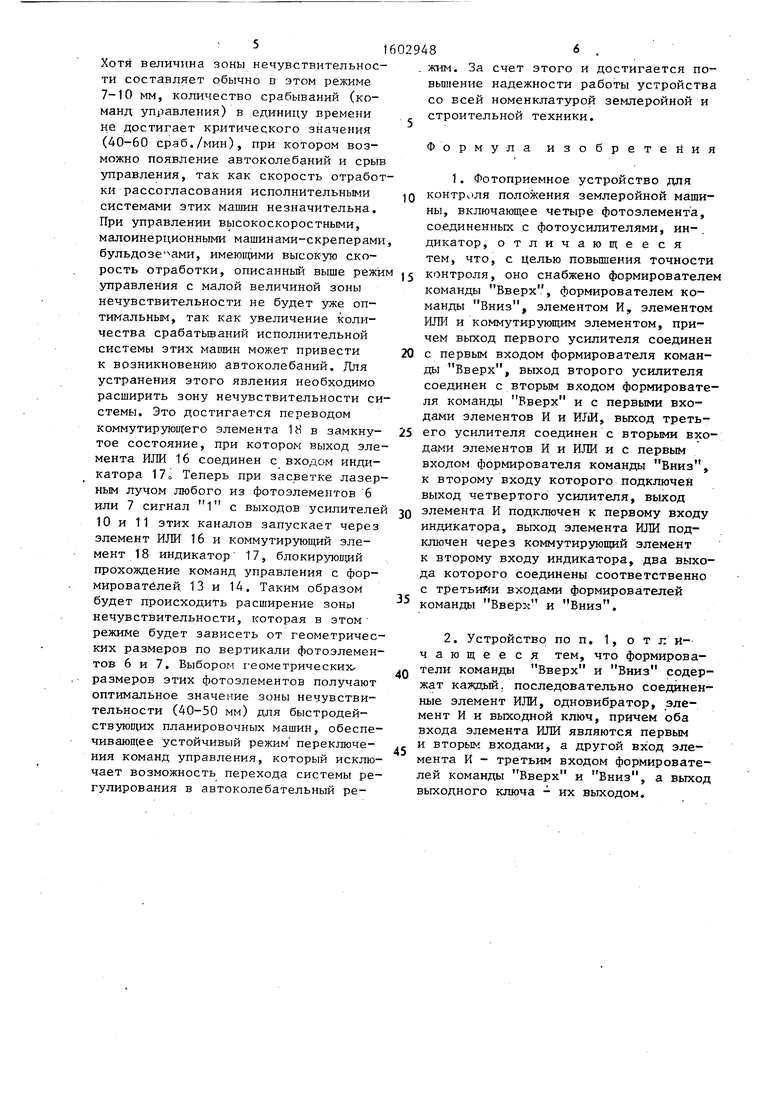
На фиг о 1 показана функциональная схема предлагаемого устройства; на фиг. 2 - выполнение формирователя команды Вниз, Вверх.,
Устройство состоит из лазера 1, коллиматора 2, сканера 3 и четырех- канального фотоприемника 4.
Фотоприемник содержит последовательно соединенные фоточувствительные элементы 5-8 и фотоусилители 9-12. Фотоусилители 9 и 12 соединены с первыми входами соответственно формирователя команды Вверх 13 и формирователя команды Вниз 14. Выходы формирователей 13 и 14 команд Вверх и Вниз соответственно подключены- к исполнительной системе механизма. Выход фотоусилителя 10 соединен с . вторым входом формирователя 13 команды Вверх и первыми входами элемента И 15 и элемента ИЛИ 16. Выход усилителя 10 соедИ14ен с вторым входом форми- рователя 14 команды Вниз и вторыми входами элемента И 15 и элемента ИЛИ 16„ Первый вход индикатора 17 подключен к выходу элемента И 15.Коммутирующий элемент 18 подключен между .выходом элемента ИЛИ 16 и вторым входом индикатора 17. Выходы индикатора 17 соединены с третьими входами формирователей команд Вверх 13 и Вниз 14.
Работа устройства заключается в следующем.
Пучок лазерного излучения, пройдя через коллиматор 2, попадает на сканер 3, который формирует в простран- стве лазерную опорную плоскость управления,
В слзп-ше отсутствия световых си1- налов лазерного излучения на фотоэлементах 5-8 команды управления на выходах формирователей 13 и 14 отсутствуют, что обеспечивает отключение исполнительной системы машины. В процессе движения машины лазерное излучение может засвечивать фотоэлементы 5-8. При одновременной засветке фотоэлементов 6 и 7 на выходе усили5
0
5 0
5
телей 10 и 11 появляются импульсные сигналы уровня 1. При совпадении этих сигналов в элементе И 15 на его выходе появляется зфовень 1. запускающий индикатор 17, сигнализирующий о том, что рабочий орган находится на заданной глубине. Команды управления с выходов формирователей 13 и 14 отсутствуют, так как с индикатора 17 на их входы подается сигнал запрета. По мере движения землеройной машины может происходить смещение рабочего органа, например, вверх с заданной лазерным лучом глубины. Фотоприемник также перемещается вверх, лазерный пучок сходит-с фотоэлемента 6 и сигнал с выхода усилителя 10 отсутствует. На выходе элемента И 15 появляется уровень О, который отключает индикатор 17 и снимается сигнал запрета, подаваемый с него на формирователи команд 13 и 14. Сигнал 1 с выхода усилителя 11 запускает формирователь 14 команды Вниз, сигнал с которого подается на исполнительную систему механизма, обеспечива- ющзпо опускание рабочего органа на за- данНую глубину. Фотоприемник также перемещается вниз относительно лазерного луча до момента засветки фотоэлемента 6, вызывающей сигнал 1 на выходе усилителя Ю и появление сигнала запрета на выходах индикатора 17, снимаю2;его команду управления с формирователя 14. Так происходит процесс . управления рабочим органом по высоте (глубине копания). Точность управления будет определяться величиной зоны нечувствительности - величиной цер- тикального перемещения фотоприемника, в пределах которого лазерный пучок, засвечивая одновременно фотоэлементы 6 и 7, обеспечивает одновремен
ное присутствие сигналов Т на выходе элемента И 15 и отсутствие команд управления. Зона нечувствительности будет определяться расстоянием между фотоэлементами 6 и 7, диаметром лазерного пучка н коэффициентом усиления усилителей 10 и 11. При этом коммутирующий элемент 18 разомкнут и элемент ИЛИ 16 не оказывает влияния на режим работы индикатора 17 и величину зоны нечувствительности.
Такой режим наиболее оптимален д;пя управления малоскоростных, инерционных механизмов - дреноукладчи- ков, асфальто- и бетоноукладчиков.
Хотя величина зоны нечувствительности составляет обычно в этом режиме 7-10 мм, количество срабываний (команд управления) в единицу времени не достигает критического значения (40-60 сраб./мин), при котором возможно появление автоколебаний и срыв управления, так как скорость отработки рассогласования исполнительными системами этих машин незначительна. При управлении высокоскоростными, малоинерционными машинами-скреперами, бульдозе ами, имеющими высокую ско10
жим. За счет этого и достигается по- вмпение надежности работы устройства со всей номенклатурой землеройной и строительной техники.
Формула изобретения
1. Фотоприемное устройство для контроля положения землеройной машины, включающее четыре фотоэлемента, соединенных с фотоусилителями, ин-. дикатор, отличающееся тем. что, с целью повьш1еиия точности
рость отработки, описанный выше режим ,5 контроля, оно снабжено формирователем
управления с малой величиной зоны нечувствительности не будет уже оптимальным, так как увеличение количества срабатьшаний исполнительной системы этих мавжн может привести к возникновению автоколебаний. Для устранения этого явления необходимо расширить зону нечувствительности системы. Это достигается переводом коммутирующего элемента 18 в замкнутое состояние, при котором выход элемента ИЛИ 16 соединен с входом индикатора 17о Теперь при засветке лазерным лучом любого из фотоэлементов 6 или 7 сигнал 1 с выходов усилителей 10 и 11 этих каналов запускает через элемент ИЛИ 16 и коммутирующий элемент 18 индикатор 17, блокируюпщй прохождение команд управления с формирователей 13 и 14. Таким образом будет происходить расширение зоны нечувствительности, которая в этом режиме будет зависеть от геометрических размеров по вертикали фотоэлементов 6 и 7. Выбором геометрических, размеров этих фотоэлементов получают оптимальное значение зоны нечувствительности (40-50 мм) для быстродей- ствуюп1их планировочных машин, обеспечивающее устойчивый режим переключения команд управления, который исключает возможность перехода системы регулирования в автоколебательный рекоманды Вверх, формирователем команды Вниз, элементом И, элементом ИЛИ и коммутирующим элементом, причем выход первого усилителя соединен
20 с первым входом формирователя команды Вверх, выход второго усилителя соединен с вторым входом формирователя команды Вверх и с первыми входами элементов И и HJiM, выход треть25 его усилителя соединен с вторыми входами элементов И и ИЛИ и с первым входом формирователя команды Вниз, к второму входу которого подключен выход четвертого усилителя, выход
30 элемента И подключен к первому входу индикатора, выход элемента ИЛИ подключен через коммутирующий элемент к второму входу индикатора, два выхода которого соединены соответственно с третьийи входами формирователей
команды Вверх и Вниз.
40
45
2. Устройство по п. 1, от г й- чающееся тем, что формирователи команды Вверх и Вниз содержат каждый, последовательно соединенные элемент ИЛИ, одновибратор, элемент И и выходной ключ, причем оба входа элемента ИЛИ являются первым и вторым входами, а другой вход элемента И - третьим входом формирователей команды Вверх и Вниз, а выход выходного ключа - их выходом.
жим. За счет этого и достигается по- вмпение надежности работы устройства со всей номенклатурой землеройной и строительной техники.
Формула изобретения
1. Фотоприемное устройство для контроля положения землеройной машины, включающее четыре фотоэлемента, соединенных с фотоусилителями, ин-. дикатор, отличающееся тем. что, с целью повьш1еиия точности
контроля, оно снабжено формирователем
контроля, оно снабжено формирователем
команды Вверх, формирователем команды Вниз, элементом И, элементом ИЛИ и коммутирующим элементом, причем выход первого усилителя соединен
с первым входом формирователя команды Вверх, выход второго усилителя соединен с вторым входом формирователя команды Вверх и с первыми входами элементов И и HJiM, выход третьего усилителя соединен с вторыми входами элементов И и ИЛИ и с первым входом формирователя команды Вниз, к второму входу которого подключен выход четвертого усилителя, выход
элемента И подключен к первому входу индикатора, выход элемента ИЛИ подключен через коммутирующий элемент к второму входу индикатора, два выхоа которого соединены соответственно с третьийи входами формирователей
оманды Вверх и Вниз.
2. Устройство по п. 1, от г й- чающееся тем, что формирователи команды Вверх и Вниз содержат каждый, последовательно соединенные элемент ИЛИ, одновибратор, элемент И и выходной ключ, причем оба входа элемента ИЛИ являются первым и вторым входами, а другой вход элемента И - третьим входом формирователей команды Вверх и Вниз, а выход выходного ключа - их выходом.
..
К 5 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движущимися объектами | 1980 |
|
SU906268A1 |
| Широкозахватный фотодатчик ориентации гелиостата | 1986 |
|
SU1401292A1 |
| Устройство для управления подвижными объектами | 1988 |
|
SU1619032A1 |
| Система автоматизации планировочных работ | 1983 |
|
SU1099014A1 |
| ИЗВЕЩАТЕЛЬ В.И. ЯЦКОВА С ЁМКОСТНЫМ И ЛУЧЕВЫМ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2017 |
|
RU2697617C2 |
| Устройство для пожарной сигнализации | 1982 |
|
SU1117673A1 |
| ЭЛЕКТРОПРИВОД УДАРНОГО ДЕЙСТВИЯ | 1992 |
|
RU2017319C1 |
| УСТРОЙСТВО ДВУСТОРОННЕЙ ОПТИЧЕСКОЙ СВЯЗИ | 1999 |
|
RU2155450C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| Устройство для управления исполнительным органом | 1974 |
|
SU557354A1 |
Изобретение относится к автоматическому управлению подвижными механизмами, например мелиоративными, строительными и другими землеройными машинами. Цель изобретения - повышение точности контроля положения землеройной машины. Устройство состоит из последовательно соединенных лазеров, коллиматора 2, сканера 3 и четырехканального фотоприемника 4. Последний содержит четыре фотоэлемента (ФЭ) 5-8, каждый из которых подключен соответственно к фотоусилителю (ФУ) 9-12. Выходы ФУ 9 и 11 соединены соответственно со входами формирователей 13 и 14 команды (ФК) "Вверх" и "Вниз". Выходы ФК 13 и 14 подключены к исполнительной системе механизма. Выходы ФУ 10 и 11 подключены соответственно к входам элементов И 15 и ИЛИ 16, выходы которых соответственно через индикатор 17 и коммутирующий элемент 18 подключены к третьим входам ФК 13 и 14. Зона нечувствительности определяется расстоянием между ФЭ 6 и 7, диаметром лазерного пучка и коэффициентом усиления ФУ 10 и 11. При засветке лазерным лучом любого из ФЭ 6 или 7 сигнал логической "I" выходов ФУ 10 и 11 запускает через элемент ИЛИ 16 и элемент 18 индикатор 17, блокирующий прохождение команд управления с ФК 13 и 14. Таким образом происходит расширение зоны нечувствительности. 1 з.п. ф-лы, 2 ил.
| Беляев В.П., Федоров Л.С | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М.: Электронная промышленность, 1981, с | |||
| Топочная решетка для многозольного топлива | 1923 |
|
SU133A1 |
| Новая геодезическая техника и ее применение в строительстве | |||
| М.: - Высшая школа, 1982, с | |||
| Катодное реле | 1921 |
|
SU250A1 |
