Изобретение относится к области автоматики и может быть использовано при создании устройства для управления подвижными объектами., например строительными и землеройными машинами, асфальте- и бетоноукладчиками, путерихтовочними ма нинам драгами, землеснарядами и т,д.
Известно устройство управления подвижнь№Ш объектами с помоиью лазерного луча 1 .
Устройство содержит лазерный излучатель и фотоприемник , состояш.ий из фоточувствительных элементов, подключенных к дифференциальному усилителю. Лазернрлй излучатель создает в пространстве веерообразную эталонную плоскость. При отклонении фотоприемника, установленного на подвижном объекте, от эталонной плоскости, на выходе дифференциального усилителя формируется электрический сигнал, который воздействует на исполнительную систему объекта, возвращая его в эталонную плоскость
Суа.ественным недостатком устройства является возможность потерь управления, снижающая надежность работы системы регулирования.
Потеря управления может произойти, например для землеройных машин, вследствие резкого изменения высотного положения рабочего органа маши при неровностях поверхности , особенно на больших рабочих скоростях движения. Фоточувствительные элменты в этом случае могут выйти из луча, а формирование команд на возврат фотоприемника взону луча не производится.
Применение в устройстве дифференциальной схемы включения фоточувствительных элементов позволяет получать высокую точность работы, особенно при спокойной атмосфере и на небольших расстояниях до 100 м ,. Устройство может быть использовано для производства точных работ на небольших расстояниях,, например для рихтовки железнодорожного полотна, для управления различными механизмами в условиях цеха. При использовании устройства для работ на больших расстояниях (500-1000 м), например дренаж, рытье каналов, планировка поверхности земли, вследствие влияния атмосферы на положение луча в пространстве, происходит хаотическое ,смещение луча и устройство буде формировать командд-л управления исполнительной системой с большой частотой ЦО-50 Гц 1, исполнительная система и рабочий орган вследствие их инерционности не успевают отрабатывать эти команды и в результате может произойти потеря управления, т .е. это устройство имеет узкофункциональное назначение м обладает низко надежностью работы.
Наиболее близким по технической сущности к предлагаемому изобретен , является лазерное устройство для управления подвижными механизмами Г2 . -.
Устройство состоит из лазера с иточником питания, оптической систем блока управления и трехканального фтоприемника , каждый канал которого включает фоточувствительннй элемент и усилитель. Фотоприемники с блоком управления располагаются на подвижном, объекте.
Работает устройство следующим образом.
Промодулированное лазерное излучение развертывается оптической системой в горизонтальной плоскости к направляется на фотоприемник. В процессе работы ме.ханизма происходит отклонение его рабочего органа в вертикальной плоскости, а следовательно, и фотоприемника относительно луча и засветки определенных фоточувствительных элементов. Сигна с фоточувствительных элементов усиливаются и поступают в блок управления, который, воздействуя на исполнительную систему механизма, выставляет рабочий орган на заданную глубину, при этом засвечивается средний фоточувствительный элемент, и команды.на исполнительную систему отсутствуют.
Недостатком устьюйства является низкая надежность его работд. Это связано, во-первых, с возможностью потери луча фотоприемником и срывом управления, например, если в момент засветки крайних фоточувствительных элементов произойдет проседание почвы, экранирование луча посторонними предметами или подвижными механизмами и т.д., рабочий орган может принять такое положение, при котором ни один фоточувствительный элемент не засвечен. Фотоприемник не может вернутьсяв луч, так как система не обладает памятью и устройство становится неработоспособным.
Во-вторых, устройство имеет узкофункциональное назначение,,так как в нем невозможно выбрать оптимальное расстояние между крайн {ми фоточувствительными элементами. В устройстве они закреплены неподвижно на фотоприемнике. Расстояние между фотоэлементами определяет точность и устойчивость работы устройства будет оптимальным только для определенного типа управляемых механизмов Если, например, устройство использовалось для управления бетоноукладчиком, имеющим малую скорость движения и отработки команд управления, то расстояние между фотоэлементами с целью увеличения точности может быть уменьшено. При
управлении высокоскоростными землеройными машинами требования к точности менее жесткие, а скорость отработки команд здесь значительно выше, чем у бетоноукладчика, поэтом расстояние между крайними фоточувствительными элементами должно быть увеличено, в противном случае количество срабатываний исполнительной системы в единицу времени может превысить допустимое и система регулирования выйдет из строя.
Цельюизобретения является повышение надежности работы устройства.
Цель достигается тем, что в известном устройстве, содержащем лазеный источник излучения с блоком питания и оптической системой, трехканальный фотоприемник, каждый кана которого состоит из последовательно соединенных фоточувствительного элемента и усилителя и блока упрсчвления, между усилителями первого и третьего каналов фотоприемника и блоком управления введены последовательно соединенные интегратор и блок .памяти, между усилителем второго канала фотоприемника и .блоком управления введены последовательно соединенные интегратор и пороговый блок, другие выходы которого подключены к управляющим входам блоков памяти первого и третьего каналов, а также задающие элементы, выходы которых связаны с установочными входами блоков памяти, при этом фоточувстЕительные элементы первого и третьего каналов выполнены с возможностью перемещения в вертикальной плоскости относительно друг друга.
. На чертеже показана функциональная схема предлагаемого устройства.
Устройство состоит из лазерного источника 1 излучения с блоком 2 питания и оптической системой 3, блока 4 управления, трехканального фотоприемника 5, каждый канал которого содержит фоточувствительные элементы 6, усилителя 7 и интегратры 8, блоки 9 памяти, задающие эле-, менты 10, пороговый блок 11.
Работает устройство следующим образом.
Оптическая система 3 развертывает лазерное излучение в световую плоскость, которая может быть расположена под-любым углом к горизонту. Фотоприемник 5 закреплен на рабочем органе подвижного механизма. При отклонении фотоприемника от эталонной плоскости он вырабатывает сигналы, которые подаются на блок 4 управления. Блок формирует команды управления исполнительной системой механизма, регулирующей положение рабочего органа. При нахождении рабочего органа на заданной глубине
засвечен средний фото.о.иод /второй канал ), импульсы с которого усиливаются и накапливаются в интеграторе 8.
При превышении выxoдн лм напряжением интегратора 8 определенного уровня сра,батывает пороговый блок 11. который блокирует блоки памяти первого и третьего каналов, исключая тем самьпи ложное срабатывание исполнительной Системы м.ехани зма.
0
При смещении рабочего органа вниз (вверх ) по вертикали засвечиваются фоточувствительннй элемент 6 первого, третьего канала, усиленные сигналы с которого накапливаются
5 интегратором, вызывая срабатывание блока 9 памяти. Выходной сигнал блока 9 памяти через блок 4 управления воздействует на исполнительную систему механизма, возвращая рабочий ор0ган в исходное положение. В этот момент пороговый блок 11 отключен и не блокирует блоки 9 памяти. Блок памяти может быть выполнен в виде триггера, тиристорной или газоразрядной
5 ячейки, ферромагнитной ячейки и т.д.
В случае резкого отклонения рабочего органа по глубине лазерный луч пересечет фоточувствительные элементы 6 первого, третьего канала, в ре0зультате чего включается блок 9 памяти устройства первого, третьего канала, которые даже в случае выхода фотоприемника из зоны луча обеспечивают через блок 4 управления
5 выдачу команд управления на испол V нктельную систему, осуществляющую автоматический возврат фотоприемника в зону луча, устраняя возможность потери управления. Этим достигается повьш ение надежности работы устрой0ства, а также расширение его функциональных возможностей, так как устройство может использоваться не только для управления дренажными машинами, но и для управления земсна5рядами , асфальтобетоноукладчиками и т.д.
Задающий элемент 10 позволяет предварительно выставить фотоприемник 5 в первоначальное требуемое
0 положение, включая и отключая блок 9 памяти, например по заданной проТрамме, или осуществлять первоначальный ввод фотоприемника в луч, до момента засветки фоточувствитель5ного элемента 6 второго канала и блокировки блока 9 памяти.
Задающий элемент 10 повышает надёжность первоначального ввода фотоприемника в луч, а также расширяет функциональные возможности устройства, так как устройство может использоваться для автоматического imравления различными механизмами, осуществляющих рытье котлованов под фундамент, монтаж различных
строительных конструкций по высоте и т.д.
Подвижные крайние фоточувствительные элементы 6 позволяют, для каждого типа подвижных механизмов (объектов) выставить оптимальное расстояние между ними с точки зрения получения устойчивой работы системы регулирования при заданной точности, тем самым повысить их надежность управления и расширить функциональные возможности устройства.
Таким образом, благодаря устранению возможности потери луча и срыва управления, выбора оптимального расстояния между крайними фоточувствительными элементами за счет возможности их перемещения по фотоприемнику 5 устраняют перечислен,г е ранее недостатки известных устройств и обеспечивается повьпиение надежности работы и расширение функциональных возможностей предлагаемого устройства.
Использование предлагаемого устройства для управления землеройными машинами позволит получить экономический эффект в народном хозяйстве за счет повышения производительности труда, вследствие уменьшения времени простоев, вызванных потерей луча и срывом управления.
Применение предлагаемого устройства только для управления мелиоративными машинами позволит получить годовой экономический эффект в сумме 12,5 тыс.руб. на один прибор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоприемное устройство для контроля положения землеройной машины | 1988 |
|
SU1602948A1 |
| Устройство для управления подвижными объектами | 1988 |
|
SU1619032A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| Система управления курсом движения землеройных машин | 1989 |
|
SU1647092A1 |
| Устройство управления рабочим органом дреноукладчика | 1983 |
|
SU1151647A1 |
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| СПОСОБ УПРАВЛЕНИЯ СООРУЖЕНИЕМ ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННОГО ОБЪЕКТА | 1991 |
|
RU2034969C1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Устройство для автоматического управления строительной машиной | 1986 |
|
SU1364670A1 |
| СКАНИРУЮЩАЯ СИСТЕМА | 1991 |
|
RU2024896C1 |
1.УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖУШИМНСЯ ОБЪЕКТАМИ, содержащее лазерный источник излучения с блоком питания и оптической системой, трехканальный фотоприемник, каждый канал которого состоит из последовательно соединенных фоточувствительного элемента и усилителя и блока | управления, отличающееся : тем, что, с целью повьичения надежности устройства, между усилителями первого и третьего каналов фотоприемника и блоком управления введены последовательно соединенные интегратор и блок памяти, между усилителем второго канала фотоприемника и блоком управления введены последовательно соединенные интегратор и пороговый блок, другие выходы которого подключены к управляющим входам блоков памяти первого и третьего каналов, а также задающие элементы, выходы которых связаны с установочными входами блоков памяти, 2, Устройство по п, 1, отличающееся тем, что, с целью выбора оптимального расстояния, фото-g g чувствительные элементы первого и (Л третьего каналов выполнены с возможностью перемещения в вертикальной плоскости относительно друг друга. со о да to Ob 00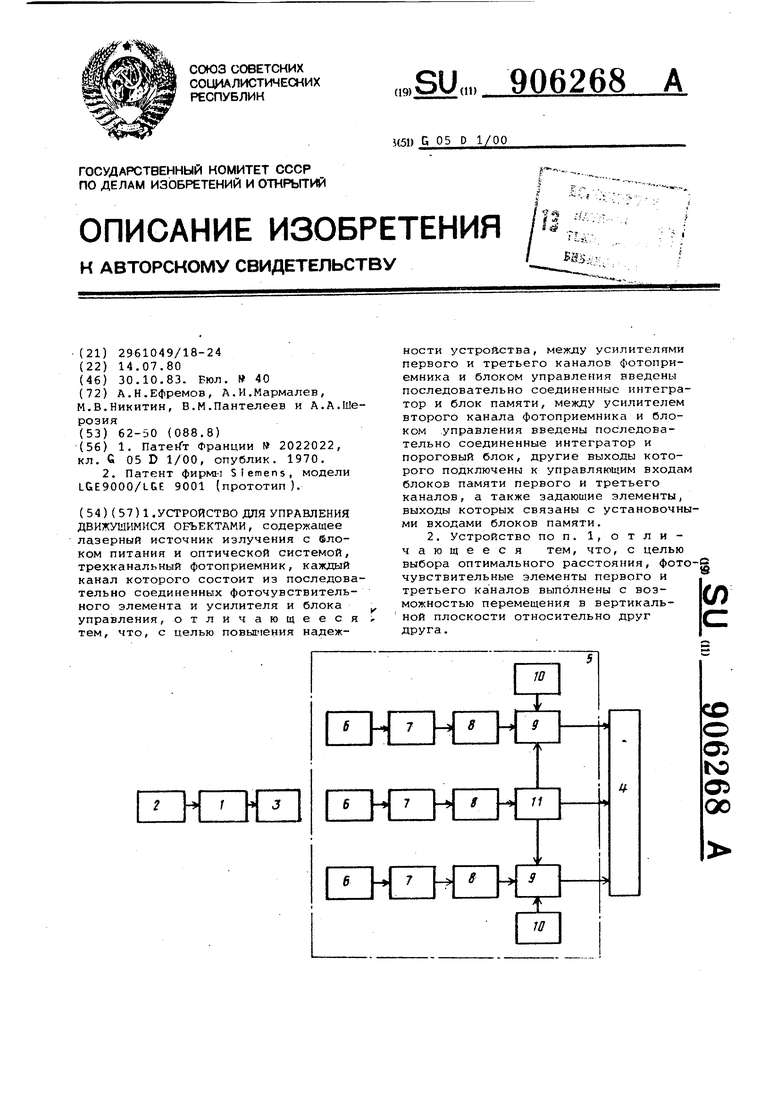
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
