1
Изобретение относится к технической фкаике и может быть использовано при создании устройств для управления исполнительным органом.
Известно устройство с применением лазера для ориентирования земснаряда , Это устройство состоит на лазерного излучателя и приемиика. Излучателем является лазерный визир с оптико-механическим сканатором. Приемник содержит четыре идентичных фоточувствительных элемента и блок сигнализации. Ориентирование земснаряда производится относительно луча лазера, предварительно выставленного по створу проектируемой траншеи. В случае ухода земснаряда от створа засвечиваются определенные фоточувствительные элементы сигналы с которых получают на блок сигнализации, по данным которого оператор судит об отклонении земснаряда и вручную возвращает его в створ.
Недостатками этого устройства являютс ручное управление положением земснаряда н невысокая точность ориентирования.
Известно лазерное устройство, контрсьлирукядее работу бульдозеров нлн грейдеров путем препставлення оператору данных об уровне окончательной поверхности, до которой они должны работать 2}. Лазер устанавливается на теодолитовой подставке, лазерный луч развертывается или сканируется по определенному участку, создавая эталонную плоскость. Сигнал с фоточувствительных элементов подается на электрогидравлические вентили, автоматически осуществляющие гидравлический подъем или опускание рабочего органа машины, поддерХ4исая необходимую границу выравнивания поверхности. Недостатком устройства яв ляется невысокая точность планировки поверхности, так как используется несколько фоточувствительных элементов, которые в процессе эксплуатации неодинаково изменяют свои параметры, что приводит к нарушению стабильности нулевой точки.
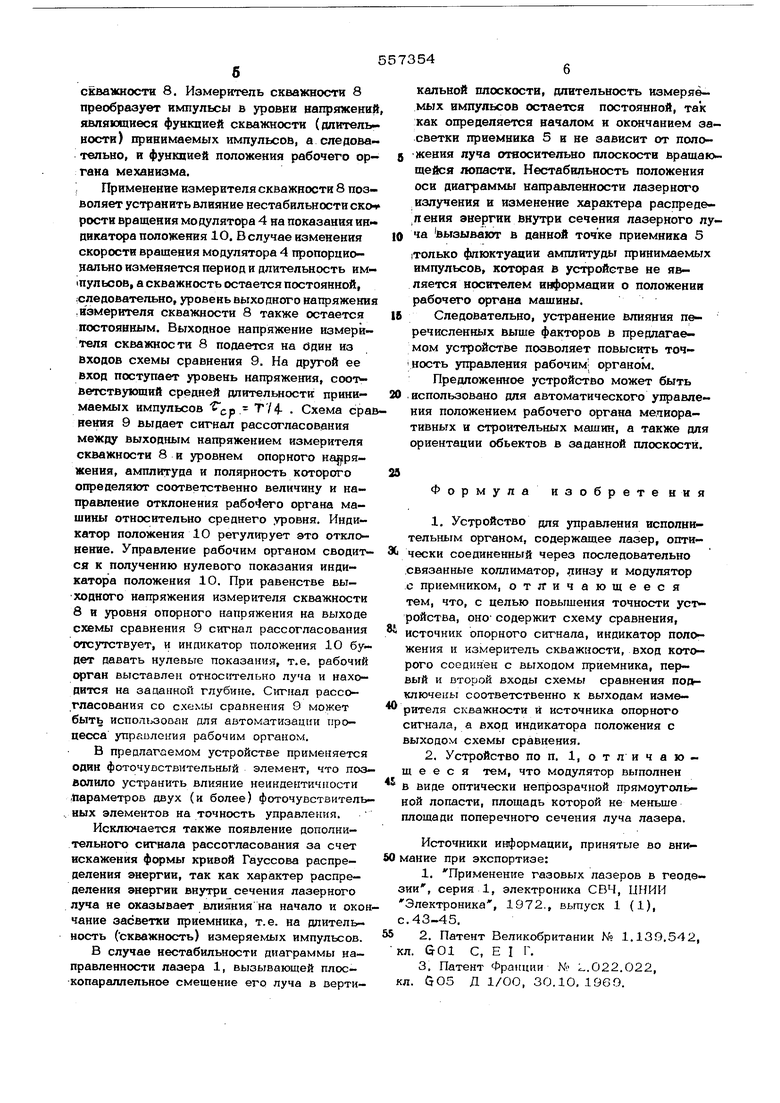
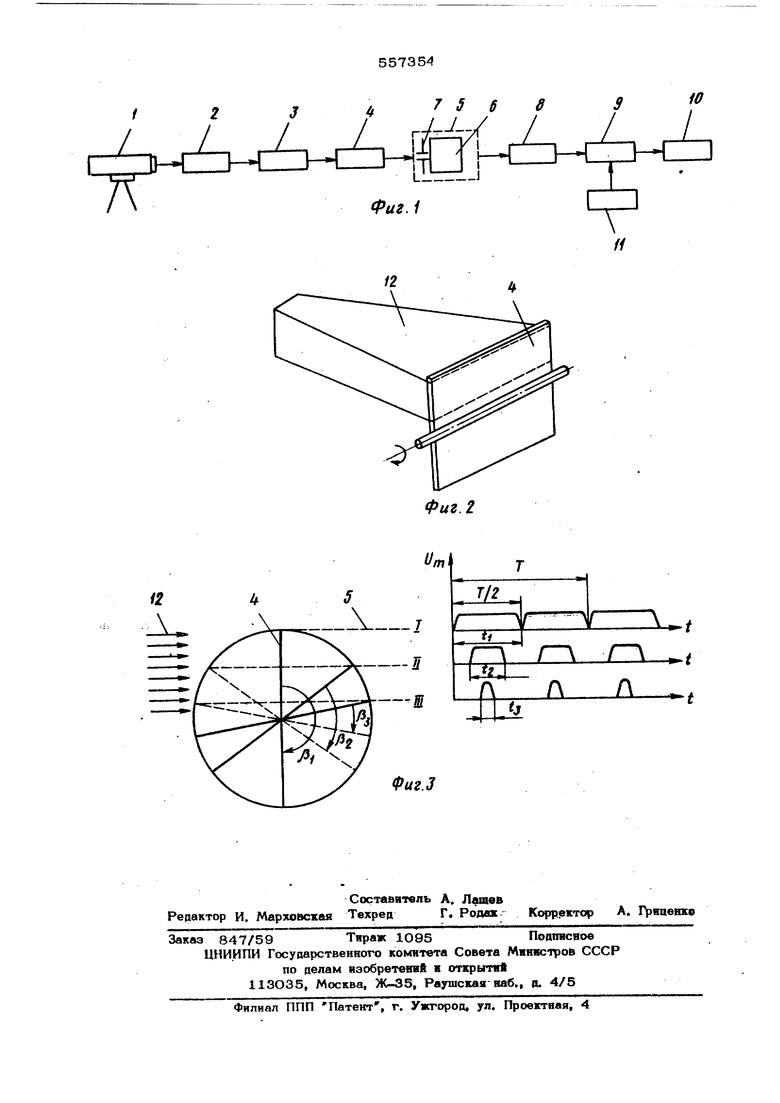
Известно лазерное устройство, содержа щее лазер, оптически соединенный через последовательно связанные коллиматор, линзу и модулятор с приемником, позволяющее аотоматически регулировать положение рабо- чего органа машин по глубине |з. Это устр(Лство является наиболее близким по те ввчесЕой сущности предлагаемому изобретению. Однако оно имеет ряд недостатков, кото рые снижают точность его работы. Во первых, применение не менее двух фоточув- ствительных элементов приводит к дрейфу вулевой точки дифференциального усилителя так как параметры фоточувствительных элементов в результате их старения изменяются Неодинаково, во - вторых , возможно появление дополнительного сигнала рассогласования на выход дифференциального усилителя, в результате искажения фор мы кривой Гауссова распределения энергии в поперечном сечении луча, которое вызывается средой, где распространяется лазерное излучение, В-третьих, случайное изменение положения оси диаграммы направленности лазера в вертикальной плоскости, приводит также к появлению сигна. ла рассогласования. Целью изобретения является повышение точности устройства. Эта цель достигается , тем, что в известное устройство дополнительно введены схема сравнения, источник опорного сигнала, индикатор положения и измеритель скважности, вход которого соединен с выходом приемника, первый и второй входы схемы сравнения подключены соответственно к выходам измерителя скважности и источника опорного сигнала, а вход индикатора положения соединен с выходом схемы сравнения, и выполнением модулятора в виде оптически непрозрачной прямоугольной лопасти, плошадь коток рой не меньше площади поперечного сечения луча лазера. На фиг. 1 представлена функциональная схема устройства для управления исполнительным органом, на фиг. 2 показано взаим ное положение развернутого луча и модулятора и на фиг. 3 - диаграммы, поясняк шне работы устройства. Устройство содержит-лазер 1, коллиматор 2, линза - 3, модулятор - 4, приемник - 5 фоточувствительный элемент - 6, диафрагма - 7, измеритель скважности -8 схема сравнения .- 9, индикатор положения - 10, источник опорного сигнала - 11 развертка луча .-12. Устройство работает следующим образом. Луч лазера 1 проходит через коллиматор 2, линзу 3, которая развертывает в горизонтальной плоскости и направляет ег на модулятор 4, выполненный в виде лопасти. Развернутый луч 12 пересекает плос54 кость лопасти модулятора 4 выше или ниже оси ее вращения, при этом ось вращения перпендикулярна направлению распространения луча лазера и параллельна плоскости луча. Высота лопасти берется не менее толщины луча, ширина лопасти должна :быть не менее линейного размера луча в горизонтальной плоскости. Конструктивно лопасть может быть расположена по, обесторовы от оси вращения или по одну сторЗну., Модулятор осуийствляет щиротно-ймпульсную модуляцию лазерного излучения. Модулированный луч попадает в приемник 5, .содержащий фоточувствительный элемент 6 с диафрагмой 7. . В точках 1, ГГ, Ш условно показаны прложения приемника 5 по отношению к вращающейся лопасти модулятора 4 (к задав 4ной лучом опорной плоскости). При вахож- дении приемника 5 в точке 1 лазерный Г1уч освещает его в течение времени прохождения лопастью угла J3 П, при этом длительность импульса на нагрузке фоточувствительного элемента 6 будет определяться:й f if . JL « Д 1 CO 2 где p - угол поворота. It) - угловая скорость вращения, Т - период вращения. Когда приемник 5 находится в точке Ш, длительность импульса на его выходе будет равна fj /i J / UJ . При этом длительвость импульса t7j«C, так как «,Еспч приемник 5 находится в плоскости пуча, проходящей вблизи оси вращения .модулятора 4, длительность импульса может быть очень Mfuia и в пределе стремиться к нулю. При смещении приемника 5 в вертикальной плоскости в пределах толщины луча каждому положению приемвика 5 соответствует определеввая длительность импульса, лежащая в пределах от Т/2 до О. Следовательно, длительность импульсов будет фувкдией положения приемника 5 в вертикальной плоскости. Контроль положения рабочего органа мащины может производиться относительно среднего значения длительности импульсов 6(;я - Т / 4 f которая соответствует положевию приемвика в точке 1. Обработка принимаемого сигнала происходит следукнцим образом. Лазервый луч проходит через диафрагму 7, служащую цля увеличевия разрешающей способности приемника 5 по длительности, и попадает ва фоточувствительный элемент 6. Диаметр диафрагмы 7 выбирается значительно мевьше толщины луча лазера 1. На нагрузке | оточувствительного элемента 6 выделяются импульсы, которые поступают на измеритель скважности 8. Измеритель скважности 8 преобргюует импульсы в уровни напряжений являющиеся функцией скважности (длительности) принимаемых импульсов, а следовательно, и функцией положения рабочего органа механизма. ; Применение измерителя скважности 8 позволяет устранить влияние нестабильности ско рости вращения модулятора 4 на показания индикатора положения 1О. В случае изменения скорости вращения модулятора 4 пропорционально изменяется период и длительность им|пульсов, а скважность остается постоянной, (Следовательно, уровень выходного напряжения .измерителя скважности 8 также остается постоянным. Выходное напряжение измерителя скважности 8 подается на один из входов схемы сравнения 9. На другой ее вход поступает уровень напряжения, соответствующий средней длительности принимаемых импульсов . Схема сра нения 9 выдает сигнал рассогласования между выходным напряжением измерителя скважности 8 и уровнем опорного на ряження, амплитуда и полярность которого определяют соответственно величину и направление отклонения рабо}его органа машины относительно среднего уровня. Индикатор положения 10 регулирует это отклонение. Управление рабочим органом сводится к получению нулевого показания индикатора положения 10. При равенстве выходного напряжения измерителя скважности 8 и уровня опорного напряжения на выходе схемы сравнения 9 сигнал рассогласования отсутствует, и индикатор положения 10 будет давать нулевые показания, т.е. рабочий орган выставлен относительно луча и находится на заданной глубине. Сигнал рассогласования со схемы сравнения 9 может быть исполт зован для автоматизации процесса упрйвления рабочим органом. В предлагаемом устройстве применяется один фоточувствительный элемент, что позволило устранить влияние неиндентич1гости параметров двух (и более) фоточувствитель- .. иых элементов на точность управления. Исключается также появление дополнительного сигнала рассогласования за счет искажения формы кривой Гауссова распределения энергии, так как характер распределения энергии внутри сечения лазерного луча не оказывает влияния на начало и окон чание засветки приемника, т.е. на длительность (скважность) измеряемых импульсов. В случае нестабильности диаграммы направленности лазера 1, вызывающей плоскопараллельное смещение его луча в верти- кальной плоскости, длительность измеряемых импульсов остается постоянной, так как определяется началом и окончанием засветки приемника 5 и не зависит от положения луча относительно плоскости вращающейся лопасти. Нестабильность положения оси диаграммы направленности лазерного излучения и изменение характера распреде ления энергии внутри сечения лазерного луча вызывают в данной точке приемника 5 только флюктуации амплитудьг принимаемых импульсов, которая в устройстве не является носителем информации о положении рабочего органа машины. Следовательно, устранение влияния перечисленных выше факторов в предлагаемом устройстве позволяет повысить точНость управления рабочим; органом. Предложенное устройство может быть .использовано для автоматического управления положением рабочего органа мелиоративных и строительных машин, а также для ориентации объектов в заданной плоскости. Формула изобретения 1. Устройство для управления исполнительньгм органом, содержащее лазер, опти- чески соединенный через последовательно .связанные коллиматор, линзу и модулятор с приемником, отличающееся тем, что, с целью повышения точности устройства, оно- содержит схему сравнения, источник опорного сигнала, индикатор положения и измеритель скважности, вход кот рого соединен с выходом приемника, первый и второй входы схемы сравнения поогключеиы соответственно к выходам измерителя скважности и источника опорного сигнала, а вход индикатора положения с выходом схемы сравнения. 2. Устройство по п. 1, о т л и ч а ю щ е е с я тем, что модулятор выполнен в виде оптически непрозрачной прямоугольной лопасти, площадь которой не меньше площади поперечного сечения луча лазера. Источники информации, принятые во вниание при экспертизе: 1. Применение газовых лазеров в геодеии, серия 1, электроника СВЧ, ЦНИИ Электроника, 1972., выпуск 1 .43-45. 2. Патент Великобритании № 1.139.542, л. &01 С, Е I Г. 3. Патент Франции № L.O22.022, л. GO5 Д 1/ОО, 30.10.1969.
«.V
/ А а
X
/ Г
I
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
| Фотоприемное устройство для контроля положения землеройной машины | 1988 |
|
SU1602948A1 |
| СПУТНИКОВАЯ ЛАЗЕРНАЯ ДАЛЬНОМЕРНАЯ СИСТЕМА | 1992 |
|
RU2037849C1 |
| Устройство для управления движением дорожно-строительной машины | 1990 |
|
SU1749336A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| Устройство для пожарной сигнализации | 1982 |
|
SU1117673A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАЛЬНОСТИ И СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТОВ | 1999 |
|
RU2169373C2 |
| ОПТИЧЕСКИЙ ПРОФИЛОМЕТР | 1994 |
|
RU2085840C1 |
| ОПТИЧЕСКИЙ ПРОФИЛОМЕТР | 1994 |
|
RU2085843C1 |
| Способ определения характеристик оптического канала передачи информационного сигнала | 2015 |
|
RU2624976C2 |
Фиг.З
