Изобретение относится к вычислительной технике и может быть использовано в специализированных вычислительных устройствах, предназначенных для управления позиционированием, в частности исполнительного устройства станка.
Цель изобретения - повышение ка- дежности устройства за счет формирования зоны нечувствительности между зоной точного останова и границей зоны контроля.
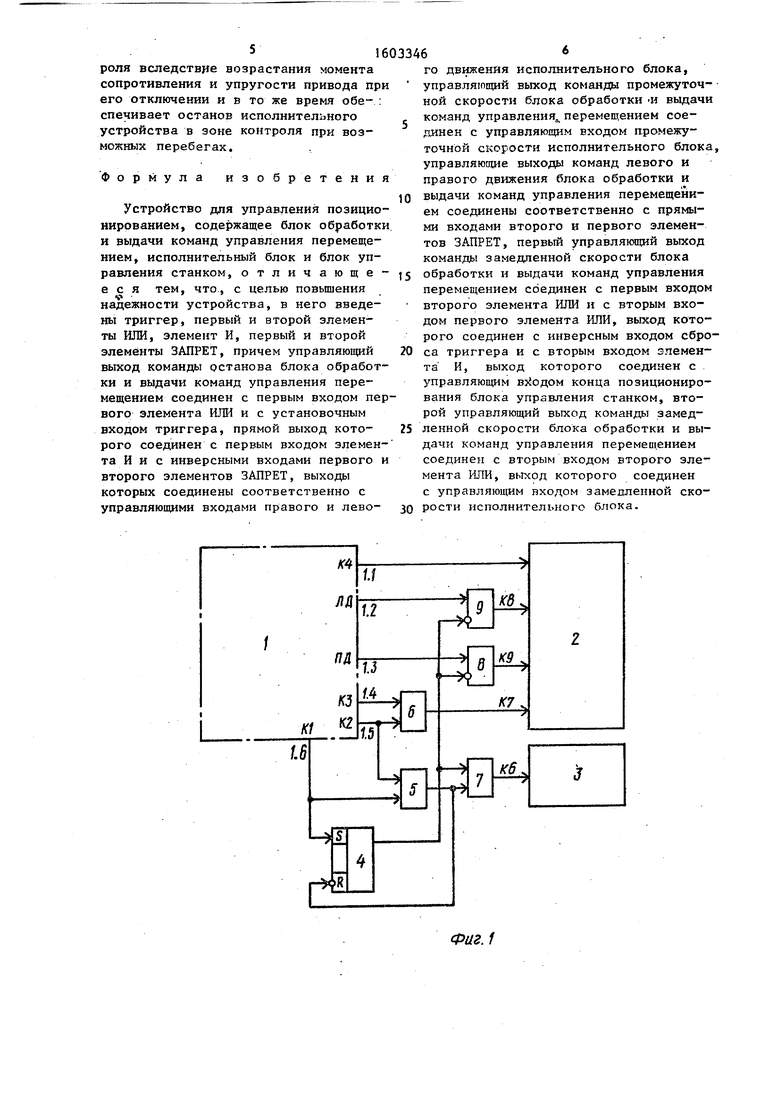
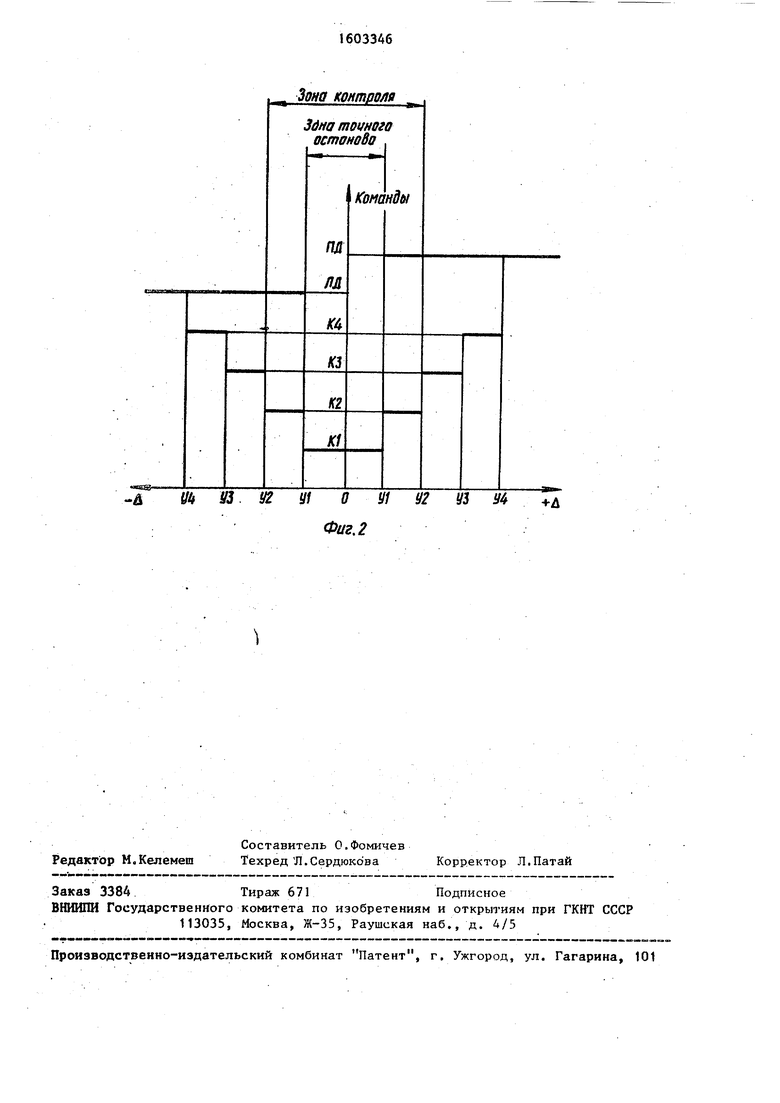
На фиг,1 представлена функциональная схема устройства; на фиг.2 - диаграмма формирования команд на выходах блока обработки и выдачи команд управления перемещением.
Устройство (фиг.1) содержит блок 1 обработки и выдачи команд управления перемещен1 ем, исполнитель 1ый блок 2, блок 3 управления станкомj триггер 4, ; первый 5 и второй 6 элементы И.ТШ, зле- мент И 7, первый 8 и второй 9 элементы ЗАПРЕТ.
Устройство работает следующим образом.
Перед запуском устройства с помощью клавиатуры блока вводят в блок 1 тpeбye &Ie величины отмера заготовки (программ работы станка) и уставки
:о
10
15
20
25
31603346
У1-У4 на формирование команд К1-К4 на снижение скорости и отключение перемещения исполнительного блока 2 при позиционировании. Величина перемещения исполнительного блока 2 контролируется датчиком перемещения исполнительного блока 2, входящим в состав блока 1.
После запуска устройства в работу (блок 1), сравнивая разность между требуемой величиной отмера (хранится в памяти блока 1) и координатой исполнительного блока 2 (измеряется датчиком) с величинами уставок У1-У4 формирует на своих выходах команды К1-К4, ЛД, ПД в соответствии с фиг.2 Если разница между требуемой величиной отмера и координатой исполнительного устройства U превышает уставку У4 () Hai соответствующем выходе блок 1 формируются команды ЛД или ПД, в зависимости от требуемого направления перемещения исполнительного блока 2 к точке позиционирования. При этом команды KI-K4 на соответствующих выходах блока 1 отключе- ны. Команды ЛД (ПД) через элемент ЗАПРЕТ 9(8) поступает на соответствующий вход исполнительного блока 2. JQ
Начинается ускоренное перемещение исполнительного блока 2 к точке позиционирования, Ра.зность между требуемой величиной отмера и координатой исполнительного устройства U уменьшается.
При условии УЗ ii 1 У4 на выходе блока 1 формируется команда К4, включающая промежуточную скорость перемещения исполнительного органа 2.
.При условии УЗ команда К4 отключается, а на выходе 1.4 блока 1 формируется команда КЗ, включающая через элемент ИЛИ 6 команду К7 на за- медленную скорость перемещения испол- нительного блока 2;
При условии У команда КЗ отключается, а на выходе 1.5 блока 1 формируется команда К2, которая через элемент -ИЛИ 6 поддерживает во . включенном состоянии команду К7, а через элемент ИЛИ 5 устанавливает на R-входе триггера 4 уровень 1. Изменений состояния выхода триггера 5 и скорости перемещения исполнительного блока 2 при этом не происходит.
При усло1зии|б1 У1 на выходе 1.2 (или 1.3) блока 1 отключается коман35
40
45
50
55
н и
в
и з и н ч
п э ч м е
и х п т
л
0
5
0
5
Q
5
0
5
0
5
да выбора направления ЛД (или ПД), на выходе 1.5 - команда К2, а на выходе 1.6 включается команда К1, устанавливающая триггер 4 по S-вхо- ду в состояние 1. При этом команда К8 (К9) на выходе элемента ЗАПРЕТ 9(8) отключается и перемещение исполнительного блока 2 прекращается. На выходе элемента И 7 устанавливается уровень 1, включающий команду Кб об окончании позиционирования.
Таким образом, отключение перемещения исполнительного блока 2 было выполнено при попадании его в зону действия команды К1 (уставка У1).
Если при отключении перемещения исполнительный блок 2 остановился в зоне I ДI У2 (включены команды К1 или К2), то оно находится в зоне контроля, триггер 4 установлен в состояние 1 и команды К8 и К9 на перемещение исполнительного блока 2 отключены.
Если при отключении перемещения вследствие перебега или отскока исполнительного блока 2 I й| У2 команды К1 и .К2 отключаются и на выходе элемента ИЛИ 5 устанавливается уровень О, сбрасывающий триггер 4 по R-вхрду в состояние О. При этом через элемент И7 отключается команда Кб об окончании позиционирования и снимается блокировка прохождения команды ЛД (ПД) через элемент ЗАПРЕТ 9(8). На вход исполнительного блока 2 поступает команда К8(К9). Работа устройства при этом определяется величиной Д и соответствует описанной выше .Щ1Я случаев, когда )бУЗ или УЗ« и1бУ4 или .
Таким образом, повторное включение команды К8(К9) на перемещение исполнительного блока 2 в случае выхода его из зоны контроля произошло при отключении команды К2 (), т.е. устройство при выходе исполнительного блока 2 из зоны точного останова имеет зону нечувствительности, определясм то разностью уставок У1 и У2 на формирование команд К2 и К..
Предложенный алгоритм управления позиционированием исполнительного блока 2, позволяющий сформировать зону нечувствительности между зоной точ- ного останова и границей зоны контроля, уменьшает вероятность выхода исполнительного блока 2 из зоны контроля вследствие возрастания момента сопротивления и упругости привода при его отключении и в то же время обе- : спечивает останов исполнительного устройства в зоне контроля при возможных перебегах.
Формула изобретения
Устройство для управления позиционированием, содержащее блок обработки и выдачи команд управления перемещением, исполнительный блок и блок управления станком, отличающееся тем, что., с целью повышения «j
надежности устройства, в него введены триггер, первый и второй элементы ИЛИ, элемент И, первый и второй элементы ЗАПРЕТ, причем управляющий выход команды останова блока обработки и выдачи команд управления перемещением соединен с первым входом первого элемента ИЛИ и с установочным входом триггера, прямой выход которого соединен с первым входом элемен- та И и с инверсными входами первого и второго элементов ЗАПРЕТ, выходы которых соединены соответственно с управляющими входами правого и левого движения исполнительного блока, управляющий выход команды промежуточ- ной скорости блока обработки -и выдачи команд управления перемещением соединен с управляющим входом промежуточной скорости исполнительного блока, управляющие выходы команд левого и правого движения блока обработки и
выдачи команд управления перемещением соединены соответственно с прямыми входами второго и первого элементов ЗАПРЕТ, первый управляющий выход команды замедленной скорости блока
обработки и выдачи команд управления
перемещением соединен с первым входом второго элемента ИЛИ и с вторым входом первого элемента ИЛИ, выход которого соединен с инверсным входом сброса триггера и с вторым входом зпемен- та И, выход которого соединен с управляющим взводом конца позиционирования блока управления станком, второй управляющий выход команды замедленной скорости блока обработки и выдачи команд управления перемещением соединен с вторым входом второго элемента ИЛИ, выход которого соединен с управляющим входом замедленной скорости исполнительного блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехфазная полюсопереключаемая обмотка | 1986 |
|
SU1410206A1 |
| Устройство для поиска информации на ленточном носителе записи | 1989 |
|
SU1638733A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ ОЧИСТКИ ВОДЫ С НЕПРЕРЫВНЫМ КОНТРОЛЕМ ЕЕ КАЧЕСТВА В РАЗЛИЧНЫХ ТОЧКАХ ТЕХНОЛОГИЧЕСКОЙ СХЕМЫ | 2011 |
|
RU2472717C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕКЛЮЧЕНИЯ ОБМОТКИ ВОЗБУЖДЕНИЯ И ДОПОЛНИТЕЛЬНОЙ ОБМОТКИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ | 2015 |
|
RU2627688C2 |
| Устройство коррекции теплового режима печи по темпу выдачи заготовок | 1984 |
|
SU1285309A1 |
| ЛОПАСТНАЯ ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2006 |
|
RU2309290C1 |
| Буферное запоминающее устройство | 1985 |
|
SU1295451A1 |
| Автоматическая окрасочная линия | 1983 |
|
SU1207510A1 |
| УСТРОЙСТВО ДЛЯ ОТВОДА ОТРАБОТАННЫХ ГАЗОВ АВТОМОБИЛЯ | 2002 |
|
RU2224666C1 |
| СИСТЕМА И СПОСОБ ОЦЕНКИ МЕДИЦИНСКОГО ИССЛЕДОВАНИЯ НА СООТВЕТСТВИЕ МИРОВОМУ УРОВНЮ | 2016 |
|
RU2633929C1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в специализированных вычислительных устройствах, предназначенных для управления позиционированием, в частности, исполнительного устройства станка. Цель изобретения - повышение надежности устройства за счет формирования зоны нечувствительности между зоной точного останова и границей зоны контроля. Поставленная цель достигается тем, что в известное устройство, содержащее блок обработки и выдачи команд управления перемещением, исполнительный блок и блок управления станком, введены триггер, первый и второй элементы ИЛИ, элемент И, первый и второй элементы ЗАПРЕТ. Введение новых элементов позволяет снизить вероятность выхода исполнительного блока из зоны контроля вследствие возрастания момента сопротивления и упругости привода при его отключении. 2 ил.
Фаг.1
-и т т У2 ш О У1 У2 УЗ У4 :
Фаг.2
| Устройство для управления положением приводного механизма | 1987 |
|
SU1441355A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
