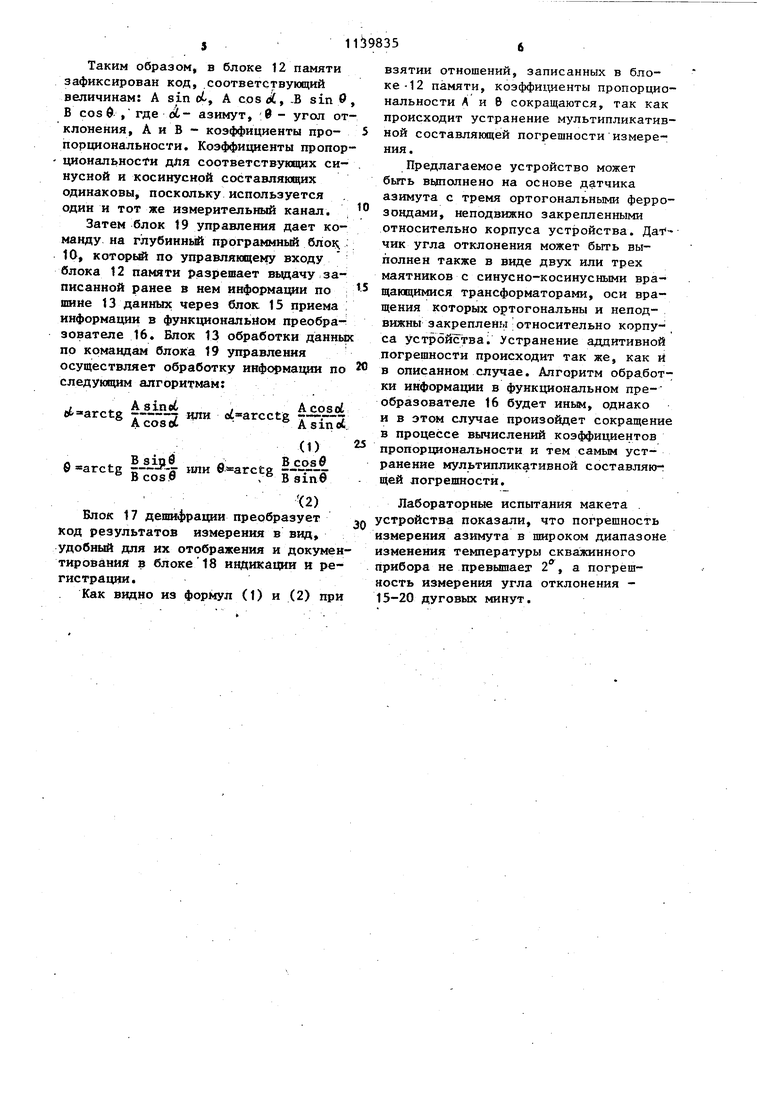
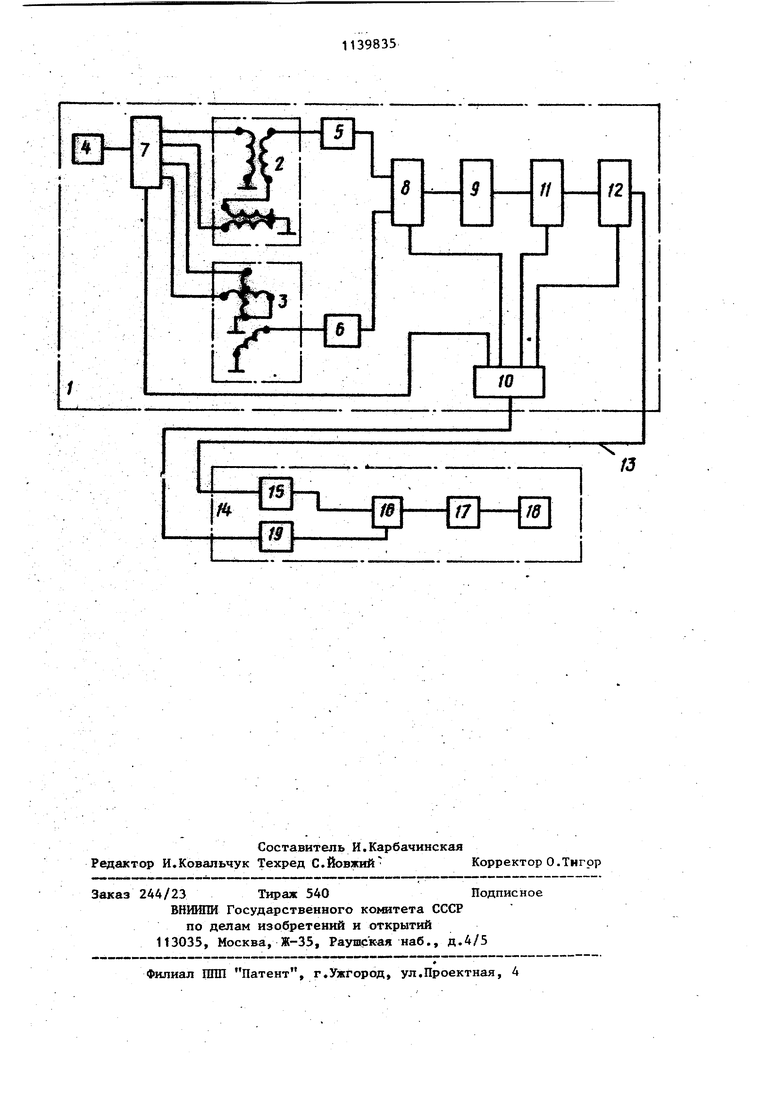
Изобретение относится к контролю за простраяственным положением ствола нефтяных и газовых скважин. Извесген азимутальный датчик инклинометра, содержащий скважинный блок, состоящий из преобразователя азимута, усилителя, генератора, ключей, триггеров и коммутатора, и наземный блок, связанный со скважинным каротажным кабелем и состоящий из генератора, ключей нуль-органа, источников разряда, блока квадрантов и рещакицего блока D Известен феррозондовьй датчик ази мута, содержащий феррозонды, датчик длины кабеля, генераторы и каналы преобразования, состоящие из фильтр усилителя, детектора, удвоителя час тоты и модулятора, а также RC-депоч ки, триггеры Шмитта, преобразовател фаза-код и счетчик С2. Недостаток устройств - зависимос результата измерений от температуры которая достигает значительной вели чины на больших глубинах и оказывает влияние как на первичные преобра зователи (феррозонды, датчики угла отклонения), так и на каналы преобразования. Известен скважинньй инклинометр, который содержит глубинное устройство, состоящее из датчиков азимута угла отклонения и положения отклонителя, фазовращателей, коммутатора, синхронных детекторов, нуль-органа, блока питания, и наземное устройство содержащее фильтр, усилитель, формирователь, счетчик, дешифратор, клю-. чи, интеграторы и измерители, имеет дополнительный канал для формирования и передачи служебных посыпок калибровки, что позволяет уменьшить ошибки, возникающие вследствие влияния температуры и других возмущакщих факторов Sj. Недостатком известного устройства является наличие двух каналов - измерительного и дополнительного для формирования и передачи служебных посьшок калибровки. Поскольку коэффициенты передачи указанных каналов не могут быть идентичными, возникающие аддитивная и мультипликативная составлякядие погрешности не компенси руются полностью, что приводит к уменьшению точности измерения. Цель изобретения - повышение точности определения углов. 35. 2 Поставленная цель достигается тем, что устройство для определения углов искривления скважины, содержащее блок возбуждения, датчик азимута на феррозондах и датчик yrrta отклонения, выходы которых соединены соответственно с входами первого и второго детекторов и с первым коммутатором, к выходам детекторов подключен второй коммутатор, выход которого соединен с аналого-цифровым преобразователем, блока приема информации и последовательно соединенных блока дешифрации и блока индикации, снабжено дополнительным коммутатором, реверсивным счетчиком, блоком памяти, глубинным программным блоком, функциональным преобразователем и блоком управления, причем вход дополнительного коммутатора соединен с блоком возбуждения, а выход дополнительного коммутатора - подключен к входам датчиков азимута и угла отклонения, к выходу аналого-цифрового преобразователя подключен вход реверсивного счетчика, а его выход - к входу блока памяти, который через шину соединен с блоком приема информации, причем последний подключен к входу функционального преобразователя, а выход блока обработки данных - к входу блока дешифрации, выходы глубинного программного блока подключены к управлякяцнм входам соответственно первого и второго коммутаторов, управляющему входу реверсивного счетчика и управляющему входу блока памяти, а выходы блока управления соединены с управляющими входами глубинного программного блока и блока обработки данных., . На чертеже предстгвлена блок-схема стройства. Устройство содержит скважинньй рибор 1, включающий датчик 2 азимута а феррозондах. Датчик 3 угла отклоения, блок 4 возбуждения, первьй 5 второй 6 детекторы, первьй 7 и вто-, ой 8 коммутаторы, аналого-цифровой реобразователь 9, глубинньй програмньй блок 10, реверсивньй счетчик 11, лок 12 памяти, соединенньй через шиу 13 данных с наземным устройством 4, включаняцим блок 15 приема инфорации, функциональный преобразователь 6, блок 17 дешифрации, блок 18 иникации JH регистрации и блок 19 упавления. Работу устройства рассмотрим на примере, где датчик азимута содержит два ортогональных горизонтируемых феррозонда, а датчик угла отклонения содержит маятник с синусно-косинусным вращающим трансформатором (СКВТ), причем как датчик азимута, так и датчик угла отклонения расположены в эксцентричном карданном подвесе. Устройство работает следующим об- ю разом. Для осуществления измерения азиму та и угла отклонения в определенной точке ствола скважины блок 19 управления дает команду глубинному программному блоку 10 на начало цикла измерения. Глубинньй программный блок 10 в свою очередь дает команду на первьй коммутатор 7, который подключает к блоку возбуждения феррозонд, измеряющий синусную составляющую азимута, датчика 2 азимута на феррозондах. Одновременно по сигналу глубинного программного блока 10 второй коммутатор 8 подключает первьй детектор 8 к аналого-цифровому преобразователю 9, а реверсивный счетчик 11 устанавливается в режим Сложение. В первом такте происходит следующее измерения величины и определение знака синусной составляющей азимута. Первый детектор 5 вьщеляет аналоговый сигнал, несущий информацию о величине и знаке синусной составляющей азимута, аналого-цифровой преобразователь 9 преобразует этот сигнал в число-импульсный код, которьш поступает на вход реверсивного счетчика 11. В реверсивном счетчике 11 записывается результат измерения, содержащий аддитивную и мультипликативную составляншще погрешности. Причиной аддитивной составлякнцей погрещности может быть, например, дрейф нуля измерительного канала. Причиной мульти пликативной составляющей погрешности - изменение коэффициента передачи измерительного-канала, связанное с изменением температуры скважинного прибора. Во втором такте по команде глубинного программного блока 10 первый коммутатор 7 отключает блок 4 возбуж дения от датчика 2 азимута на феррозондах, а реверсивньй счетчик 11 переключается в режим Вычитание. По11354 скольку феррозонд, измерякядий синус-i ную составляющую азимута, отключен от блока 4 возбуждения, измерительный канал осуществляет измерение и преобразование в число-импульсный код аддитивной составляющей погрешности измерения. Число-импульсный код с выхода аналого-цифрового преобразователя 9 поступает на вход реверсивного счтечика 11 и вычитается из числа, записанного в первом такте. Таким образом, в реверсивном счетчике оказьшается записанным код синусной составляющей азимута без аддитивной составлякяцей погрешности. В третьем такте глубинный программньй блок 10 устанавливает блок 12 памяти в режим Запись информации, и код, соответствующий синусной составляющей азимута без аддитивной помехи, с выхода реверсивного счетчика 11 поступает на блок 12 памяти и запоминается. Так осуществляется устранение аддитивной составляющей помехи. На этом цикл измерения и запоминания синусной составляющей заканчивается . ) Аналогично происходит измерение и запоминание косинусной составляющей азимута. После измерения и запоминания синусной и косинусной составляющих азимута по команде глубинного программного блока 10 первый коммутатор подключает датчик 3 угла отклонения на основе синусно-косинусного вращающегося трансформатора к блоку 4 возбуждения, а второй коммутатор 8 подключает к входу аналого-цифрового преобразователя 9 выход второго детектора 6, связанного с сигнальной обмоткой синусно-косинусного вращающегося трансформатора датчика 3 угла отклонения . Измерение и запоминание синусной и косинусной составляющих угла отклонения происходит аналогично тому, как это осуществлялось при измерении и запоминании синусной и косинусной составляющих азимута. После окончания полного цикла записи в блоке 12 памяти оказьшается записанной информация о синусных и косинусных составляющих азимута и угла отклонения, содержащая мульти- . пликативную составляющую погрешности, и не содерзкащая аддитивную составля- кщую погрешности. Таким образом, в блоке 12 памяти зафиксирован код, соответствующий величинам: А sin oi-, А cos, -В sin О В созб ,где i- азимут, 9 - угол от клонения, А и В - коэффициенты пропорциональности. Коэффициенты пропор циональности для соответствукщих синусной и косинусной составляющих одинаковы, поскольку используется один и тот же измерительный канал. Затем блок 19 управления дает команду на глубинный программный бло1я 10, которьй по управляющему входу блока 12 памяти разрешает записанной ранее в нем информации по шине t3 данных через блок 15 приема информации в функциональном преобразователе 16, Блок 13 обработки данны по командам блока 19 управления осуществляет обработку информации по следующим алгоритмам: , Asine6 , Acoso6 et-arctg 7----:j W™ d «arcctg 7-,--: A cos 06 Asinot (1) В sinfl я Bcos0 или e arctg 0 arctg STilTe BcosP , Блок 17 дешифрации преобразует код результатов измерения в вид, удобный для их отображения и докумен тирования в блоке18 индикации и регистрации. Как видно из формул (1) и (2) при взятии отношений, записанных в блоке -12 памяти, коэффициенты пропорциональности А и В сокращаются, так как происходит устранение мультипликативной составляющей погрешности измерения. Предлагаемое устройство может быть выполнено на основе датчика азимута с тремя ортогональными феррозондами, неподвижно закрепленными относительно корпуса устройства. Датчик угла отклонения может быть выполнен также в виде двух или трех маятников с синусно-косинусными вращающимися трансформаторами, оси вращения которых ортогональны и неподвижны закреплены относительно корпуса устройс тва. Устранение аддитивной погрешности происходит так же, как rt в описанном случае. Алгоритм обработки информации в функциональном пре-образователе 16 будет иньм, однако и в этом случае произойдет сокращение в процессе вычислений коэффициентов пропор1щональности и тем самым устранение мультипликативной составляю-; щей логрешности. Лабораторные испытания макета . стройства показали, что погрешность змерения азимута в широком диапазоне зменения температуры скважинного рибора не превышает 2, а погрешость измерения угла отклонения 15-20 дуговых минут.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| Устройство для контроля комплекса параметров траектории скважин и угла установки отклонителя бурового инструмента | 1982 |
|
SU1078041A1 |
| Инклинометр | 1981 |
|
SU994702A1 |
| Преобразователь азимута | 1980 |
|
SU947408A1 |
| Устройство для контроля комплекса параметров искривления скважин | 1984 |
|
SU1208208A1 |
| Феррозондовый датчик азимута | 1982 |
|
SU1025877A1 |
| Преобразователь азимута инклинометра | 1990 |
|
SU1760324A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
| Феррозондовый датчик азимута | 1982 |
|
SU1121407A1 |
| Феррозондовый датчик азимута | 1987 |
|
SU1452954A1 |
УСТРОЙСТВО ДОЯ ОПРЕДЕЛЕНИЯ УГЛОЭ ИСКРИВЛЕНИЯ СКВМИНЫ, содержащее блок возбуждения, датчик азимута на феррозондах и датчик угла отклонения, выкоды которых соединены соответственно с входами первого и второго детекторов и с первьш коммутатором, к выходам детекторов подключен второй Коммутатор, выход которого соединен с аналого-цифровым преобразователем блока приёма информации и последовательно соединенных блока дешифрации и блока индикации, отличающееся тем, что, . с Целью повышения точности определения углов, оно снабжено дополнительным коммутатором, реверсивным счетчиком, блоком памяти, глубинным программным блоком, функциональный преобразователем и блоком управления, при этом вход дополнительного коммутатора соединен с блоком возбуждения, а выход дополнительного коммутатора |/ i подключен соответственно к входам дат- |чиков азимута и угла отклонения,к вы:ходу аналого-цифрового преобразова- . теля подключен вход реверсивного i счетчика, а выход последнего подключен к входу блока памяти, который чегW рез шину соединен с блоком приема информации, причем последний подключен к входу функционального преобразователя, а выход блока обработки данных - к входу блока дешифрации, выходы глубинного программного блока подключены к управляющим входам соответственно первого и второго комсо мутаторов, управлякяцему входу реверсо сивного счетчика и управляющему . 00 входу блока памяти, а выходы блока со :п управления соединены с.управляющими входами глубинного программного блока и блока обработки данных.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Азимутальный датчик инклинометра | 1977 |
|
SU744122A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
