(21)4625151/25-28 (22)26.12.88 (46)30.11.90. Бюл. N;44
(72) В.Ф.Герасимов, В.А.Брда и Л.В.Федорова
(53)531.717(088.8)
(56)Измерительная техника, 1984, № 12,
С, I I IО. (54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И ВОСПРОИЗВЕДЕНИЯ УГЛОВ ПОВОРОТА
(57)Изобретение относится к измерительной технике и может быть использовано для измерения угла поворота изделия и воспроизведения требуемого угла при поверке и аттестации автоколлиматоров и других угломерных приборов. Целью изобретения явля3S
це1
ется повышение точности за счет повышения равномерности перемещения и демпфирования толчков и вибраций. При измерении отраженные от зеркала 4 лучи лазера 5 наблюдают в объектив 12 и регистрируют фотоприемником 16. Поворот оправы 3 осуществляют грубо от двигателя 17 и точно от пьезокерамической втулки 37. Сложение перемещений происходит на упоре 36. При поверке автоколлиматора 42 его выставляют относительно зеркала 4 и поворачивают оправу 3 на заданный угол, который воспроизводят интерферометром 5-11 При измерении угла поворота, например, преобразователя угловых перемещений его ротор связывают с оправой 3, которую поворачивают на заданный угол. 1 з.п. ф-лы, 2 ил.
2
ел
С
О
ю
(Л
О
Изобретение относится к измерительной технике и может быть использовано для измерения угла поворота изделия и воспроизведения требуемого угла при поверке и аттестации автоколлиматоров и других угломерных приборов.
Цель изобретения - повышение точности,
На фиг,1 изображена схема устройства для измерения и воспроизведения углов поворота; на фиг.2 - схема демпфера.
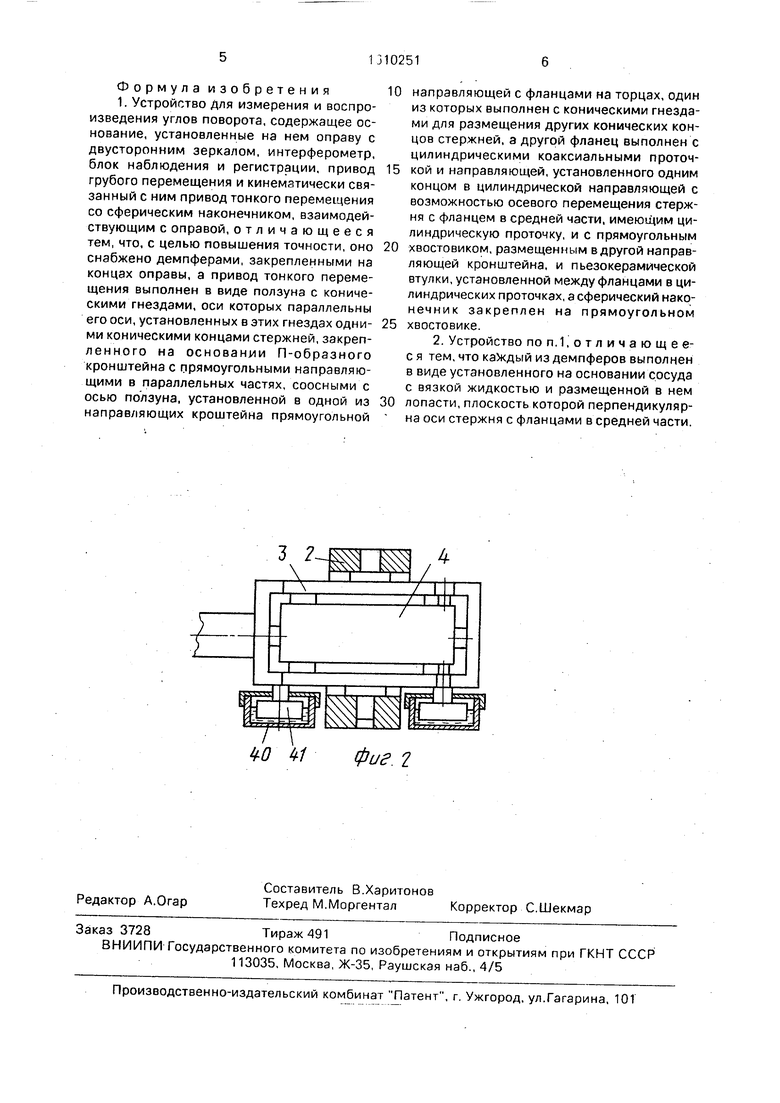
Устройство содержит основание 1-, установленные на нем стойку 2, оправу 3 с двусторонним зеркалом 4, интерферометр, выполненный в виде лазера 5, диафрагмы 6, объектива 7 коллиматора, светоделительно- го кубика 8 и отражательных зеркал 9-11, блок наблюдения и регистрации интерференционных полос, выполненный в виде обьектива 12, полупрозрачной пластины 13, неподвижного биссектора 14, окуляра 15 и фотоприемника 16, привод грубого перемещения, выполненный в виде двигателя 17, шестерен 18 и 19, винта 20 и гайки 21 со сферическим пальцем 22, привод тонкого перемещения, выполненный в виде соединенного с пальцем 22 ползуна 23 с коническими гнездами 24 и 25, стержней 26 и 27, антивибрационной пластины 28, П-образ- ного кронштейна 29 с прямоугольными направляющими, установленной в одной из них прямоугольной направляющей 30 с фланцами 31 и 32, установленного в цилиндрическое отверстие фланца 31 стержня 33 с фланцем 34 и с прямоугольным хвостовиком 35, размещенным в направляющей кронштейна 29, сферического упора 36, пье- зокерамической втулки 37 и пружин 38 и 39, закрепленные на концах оправы 3 демпферы, каждый Из которых выполнен в виде сосуда 40 с вязкой жидкостью, например глицерином, и размещенной в нем лопасти 41, и поверяемый автоколлиматор 42.
Устройство работает следующим образом.
Включают лазер 5 и направляют с помощью кубика 8 и зеркал 9-11 лучи на зеркало 4 в зоны А и В. Наблюдают отраженные лучи в объектив 12 и регистрируют фотоприемником 16. При повороте зеркала 4 возникает разность хода в лучах.
Воспроизводимый угол а поворота зеркала 4 определяют по формуле а arctg А h/L, где Ah - разность хода лучей; L- расстояние между осями лучей. Поворот оправы 3 осуществляют следующим образом. От двигателя 17 вращение передается через шестерни 18 и 19 на микрометрический винт 20, который через гайку 21 приводит в прямолинейное движение ползун 23, который, перемещаясь, через кинематическую связь заставляет перемещаться стержень 33. Подают на пьезокерамическую 5 втулку 37 управляющее напряжение, и на сферическом упоре 36 происходит сложение перемещений от ползуна 23 и втулки 37. При измерении угловых величин с точностью 0,15 в диапазоне угла 60 и точно- 0 стью 0,04 в диапазоне угла 15 требуется поворот зеркала 4 со сверхвысокой равномерностью без скачков и без люфта при реверсивности. Для этого втулка 37 установлена между фланцами 31 и 34. Такая конст5 рукция позволяет избежать кивка при контакте упора 36 с оправой 3 и перемещать оправу с точностью 0,05-0,1 мкм. Пружина 38 исключает люфт между упором 36 и оправой 3. При повороте оправы 3 лопасти 41,
0 взаимодействуя с вязкой жидкостью, успокаивают оправу 3, сглаживая ее вибрации, и обеспечивают возможность ее равномерного и плавного поворота.
Управление двигателем 17 осуществля5 ет через блок управления (не показан) по заданной программе, оператор, который поворачивает оправу 3 на требуемый угол, кратный половине интерференционной полосы. Точное наведение на максимум (мини0 мум) ближайшей интерференционной полосы осуществляют подачей управляющего напряжения на втулку 37. Кроме того, поворачивают оправу З при помощи механического привода, можно задавать углы в
5 ручном режиме.
При поверке автоколлиматора 42 его выставляют относительно зеркала 4. Изображение марки поверяемого автоколлиматора 42 направляется на зеркало 4 и после
0 отражения от него снова попадает в автоколлиматор 42, где проектируется на сетку. При повороте оправы 3 на заданный угол отраженное от зеркала 4 изображение марки смещается относительно сетки автокол5 лиматора 42. Величину этого смещения измеряют отсчетным устройством автокол- лиматорй 42. В этом случае требуемый угол воспроизводится интерферометром 5-11.
0 При измерении угла поворота изделия, представляющего собой высокочастотное угломерное устройство, например преобразователь угловых перемещений, его ротор, закрепляют на столе, (не показано), жестко связанном с поворачиваемой оправой 3. Поворачивая оправу 3 на заданный угол, снимают показания по отсчетному устройству преобразователя, сравнивая их с воспроизводимым углом.
Формул а и 3 О бретени я
1. Устройство для измерения и воспроизведения углов поворота, содержащее основание, установленные на нем оправу с двусторонним зеркалом, интерферометр, блок наблюдения и регистрации, привод грубого перемещения и кинематически связанный с ним привод тонкого перемещения со сферическим наконечником, взаимодействующим с оправой, отличающееся тем, что, с целью повышения точности, оно снабжено демпферами, закрепленными на концах оправы, а привод тонкого перемещения выполнен в виде ползуна с коническими гнездами, оси которых параллельны его оси, установленных в этих гнездах одни- ми коническими концами стержней, закреп- ленного на основан 1и П-образного кронштейна с прямоугольными направляющими в параллельных частях, соосными с осью ползуна, установленной в одной из направляющих кроштейна прямоугольной направляющей с фланцами на торцах, один из которых выполнен с коническими гнездами для размещения других конических концов стержней, а другой фланец выполнен с цилиндрическими коаксиальными проточкой и направляющей, установленного одним концом в цилиндрической направляющей с возможностью осевого перемещения стержня с фланцем в средней части, имеющим цилиндрическую проточку, и с прямоугольным хвостовиком, размещенным в другой направляющей кронштейна, и пьезокерамической втулки, установленной между фланцами в цилиндрических проточках, а сферический нако- нечник закреплен на прямоугольном хвостовике.
2. Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что каждый из демпферов выполнен в виде установленного на основании сосуда с вязкой жидкостью и размещенной в нем лопасти, плоскость которой перпендикулярна оси стержня с фланцами в средней части.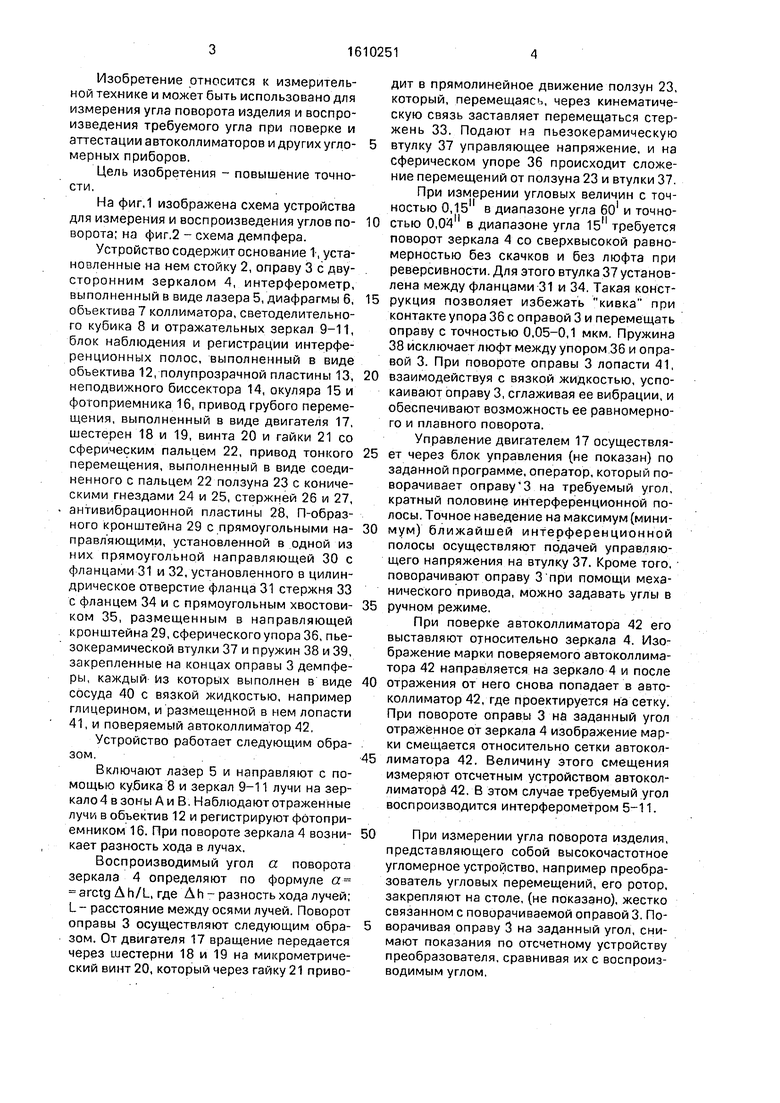
| название | год | авторы | номер документа |
|---|---|---|---|
| ШИРОКОДИАПАЗОННЫЙ КОМПАРАТОР ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ КООРДИНАТНЫХ СРЕДСТВ ИЗМЕРЕНИЙ | 2009 |
|
RU2401985C1 |
| ПОВЕРОЧНЫЙ КОМПЛЕКС КООРДИНАТНЫХ ПРИБОРОВ И ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2012 |
|
RU2494346C1 |
| Устройство для воспроизведения углов | 1986 |
|
SU1427174A1 |
| ОТРАЖАТЕЛЬНЫЙ УГЛОМЕРНЫЙ ИНСТРУМЕНТ | 2001 |
|
RU2190188C1 |
| Способ измерения угла поворота объекта и устройство для измерения угла поворота | 1986 |
|
SU1434243A1 |
| ОПТИКО-МЕХАНИЧЕСКОЕ УГЛОМЕРНОЕ УСТРОЙСТВО ПОВОРОТНОГО ТИПА С ОПТИЧЕСКИМ УКАЗАТЕЛЕМ НА ОСНОВЕ МНОГОЗНАЧНОЙ МЕРЫ И ФОТОЭЛЕКТРОННЫМ РЕГИСТРАТОРОМ | 2007 |
|
RU2377498C2 |
| Способ калибровки мобильных 3D-координатных средств измерений и устройство для его реализации | 2018 |
|
RU2710900C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2013 |
|
RU2534811C1 |
| УСТРОЙСТВО БАЗИРОВАНИЯ МНОГОГРАННЫХ ПРИЗМ | 2019 |
|
RU2711610C1 |
| Способ измерения угла поворота изделия | 1986 |
|
SU1388713A1 |
Изобретение относится к измерительной технике и может быть использовано для измерения угла поворота изделия и воспроизведения требуемого угла при поверке и аттестации автоколлиматоров и других угломерных приборов. Целью изобретения является повышение точности за счет повышения равномерности перемещения и демпфирования толчков и вибраций. При измерении отраженные от зеркала 4 лучи лазера 5 наблюдают в объектив 12 и регистрируют фотоприемником 16. Поворот оправы 3 осуществляют грубо от двигателя 17 и точно от пьезокерамической втулки 37. Сложение перемещений происходит на упоре 36. При поверке автоколлиматора 42 его выставляют относительно зеркала 4 и поворачивают оправу 3 на заданный угол, который воспроизводят интерферометром 5-11. При измерении угла поворота, например преобразователя угловых перемещений, его ротор связывают с оправой 3, которую поворачивают на заданный угол. 1 з.п.ф-лы, 2 ил.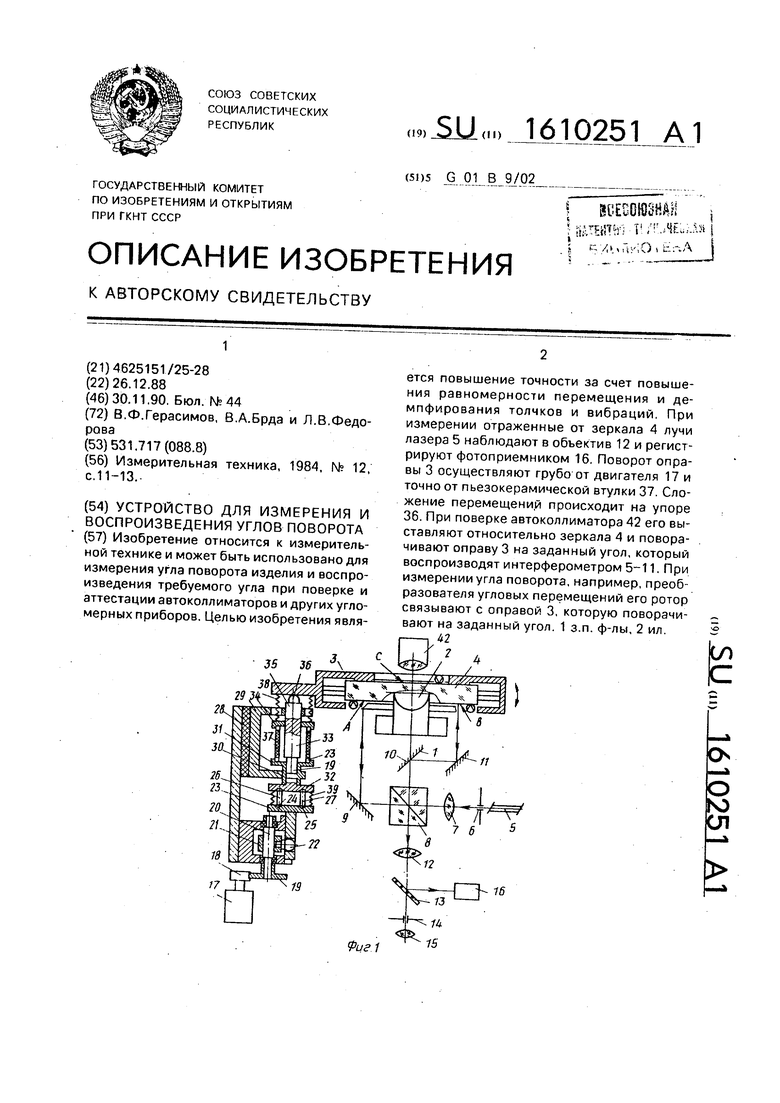
7
ff-O «/
фиг. 2
