Изобретение относится к области оптического приборостроения, в частности к юстировочным устройствам.
Цель изобретения - повышение точности юстировки путем сокращения ко .личества кинематических пар.
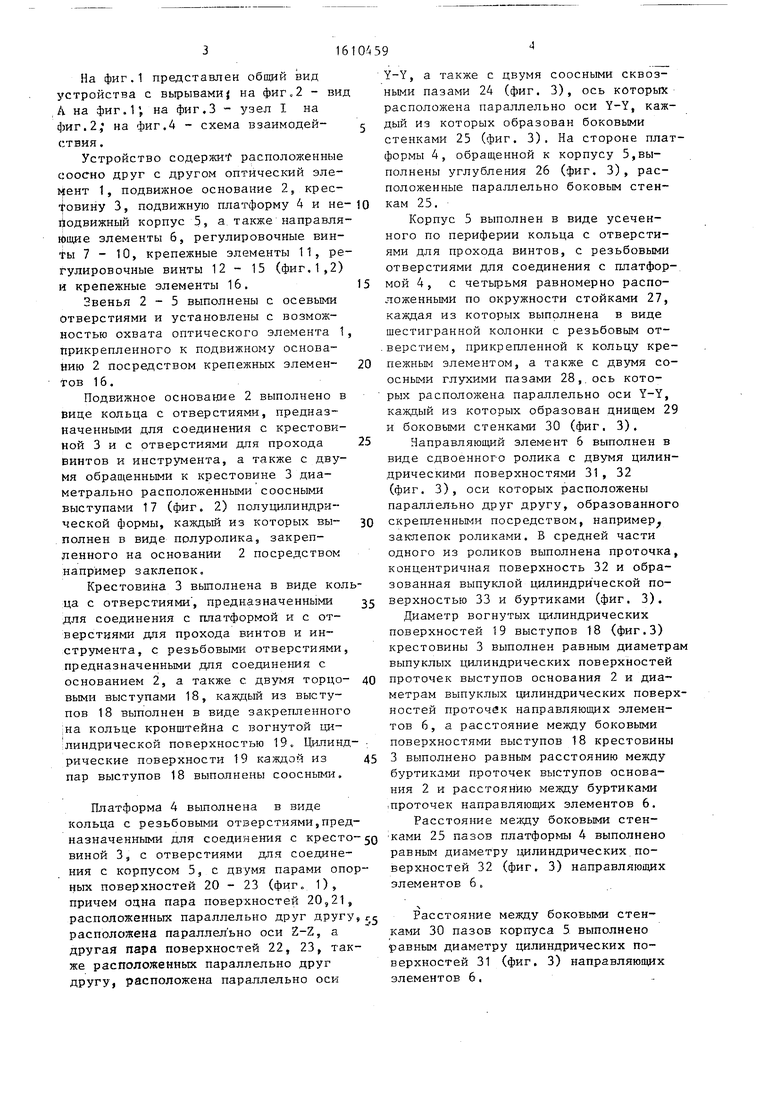
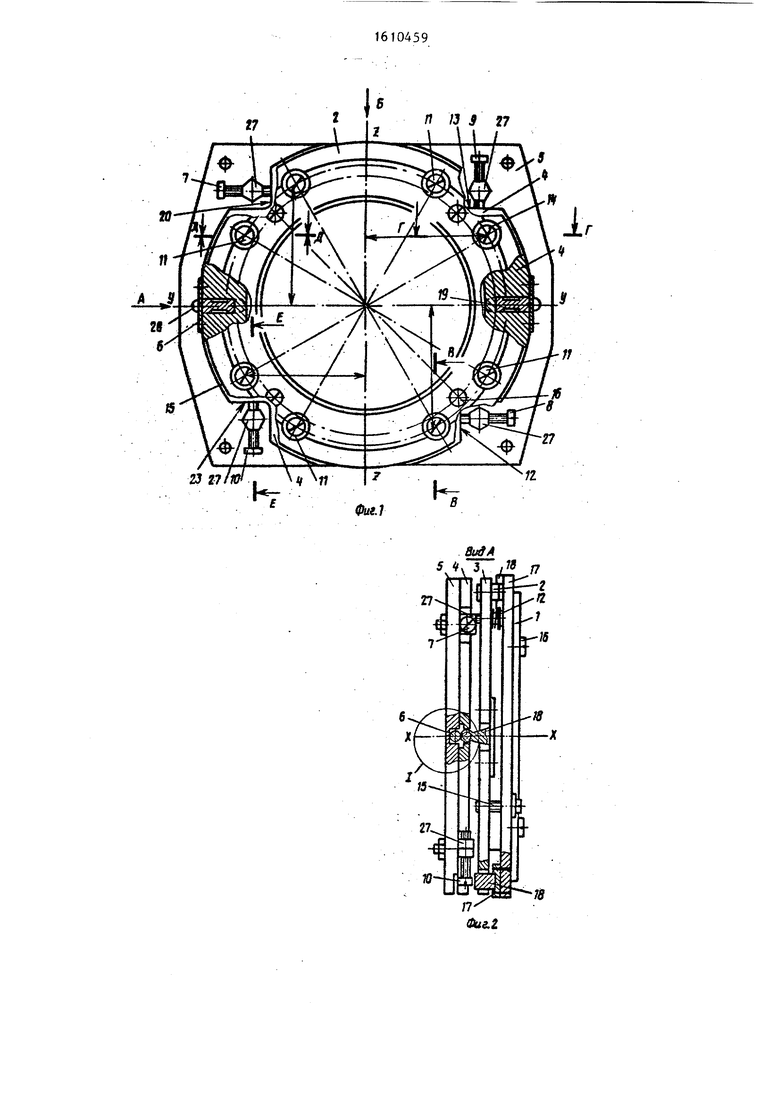
На фиг.1 представлен общий вид стройства с вырывами на фиг.2 - вид на фиг.1; на фиг.З узел I на иг.2; на фиг.4 - схема взаимодей- 5
С ТВИЯ .
Устройство содержит расположенные соосно друг с другом оптический элеент 1, подвижное основание 2, крес- toBHHy 3, подвижную платформу 4 и не- 10 Подвижный корпус 5, а, также направляющие элементы б, регулировочные винты 7 - 10, крепежные элементы 11, регулировочные винты 12 - 15 (фиг.1,2) и крепежные элементы 16,15
Звенья 2-5 выполнены с осевыми отверстиями и установлены с возможностью охвата оптического элемента 1, прикрепленного к подвижному основанию 2 посредством крепежных элемен- 20 тов 16.
Подвижное основание 2 выполнено в вице кольца с отверстиями, предназначенными для соединения с крестовиной 3 и с отверстиями для прохода 25 Винтов и инструмента, а также с двумя обращенными к крестовине 3 диаметрально расположенными соосными выступами 17 (фиг. 2) полуцилиндрической формы, каждьй из которых вы- ЗО полнен в виде полуролика, закрепленного на основании 2 посредством например заклепок.
Крестовина 3 вьшолнена в виде коль- :ца с отверстиями , предназначенными 35 для соединения с платформой и с отверстиями для прохода винтов и инструмента, с резьбовыми отверстиями, предназначенными для соединения с основанием 2, а также с двумя торцо- 40 выми выступами 18, каждый из выступов 18 выполнен в виде закрепленного ;на кольце кронштейна с вогнутой ци- линдрической поверхностью 19. Цилинд- рические поверхности 19 каждой из 45 пар выступов 18 выполнены соосными.
Платформа 4 вьшолнена в виде кольца с резьбовыми отверстиями,предназначенными для соединения с кресто-50 виной 3, с отверстиями для соединения с корпусом 5, с двумя парами опорных поверхностей 20 - 23 (фиг 1), причем одна пара поверхностей 20,21, расположенных параллельно друг другу,гд расположена параллел ьно оси E-Z, а другая пара поверхностей 22, 23, также расположенных параллельно друг другу, расположена параллельно оси
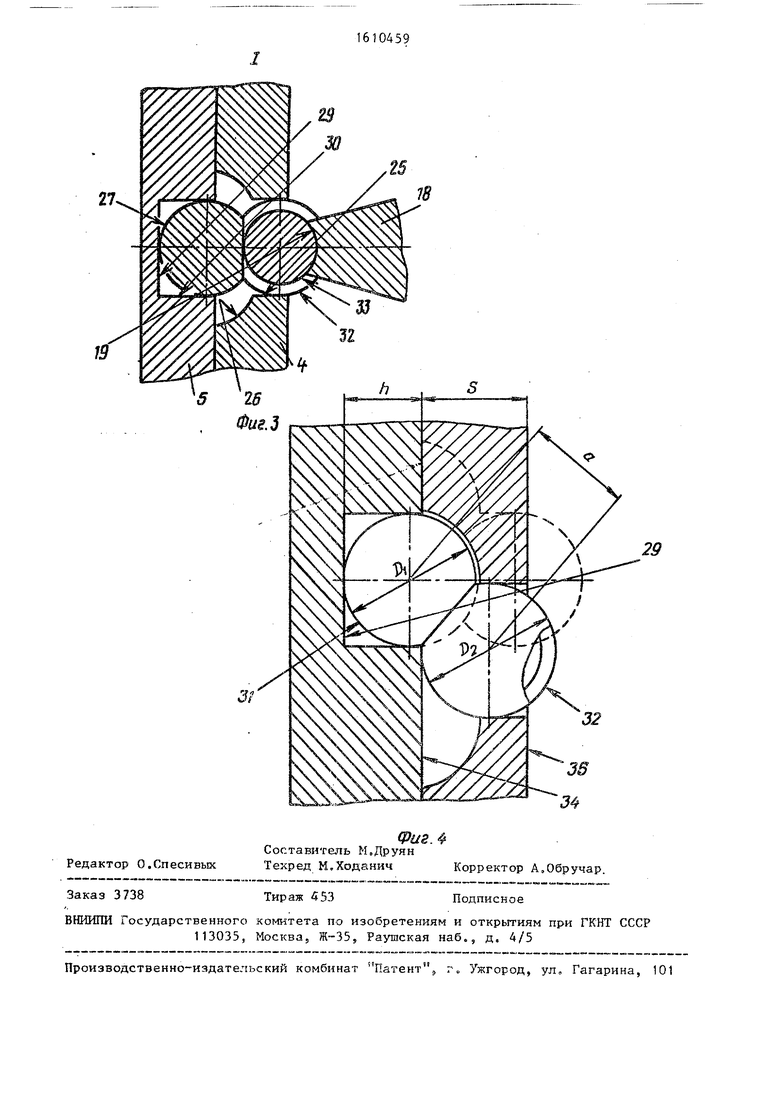
Y-Y, а также с двумя соосными сквозными пазами 24 (фиг. 3), ось которых расположена параллельно оси Y-Y, каждый из которых образован боковыми стенками 25 (фиг. 3). На стороне платформы 4, обращенной к корпусу 5,выполнены углубления 26 (фиг. 3), расположенные параллельно боковым стенкам 25.
Корпус 5 выполнен в виде усеченного по периферии кольца с отверстиями для прохода винтов, с резьбовыми отверстиями для соединения с платформой 4, с четырьмя равномерно расположенными по окружности стойками 27, каждая из которых выполнена в виде шестигранной колонки с резьбовым отверстием, прикрепленной к кольцу крепежным элементом, а также с двумя соосными глухими пазами 28,, ось которых расположена параллельно оси Y-Y, каждый из которых образован днищем 2 и боковыми стенками 30 (фиг. 3).
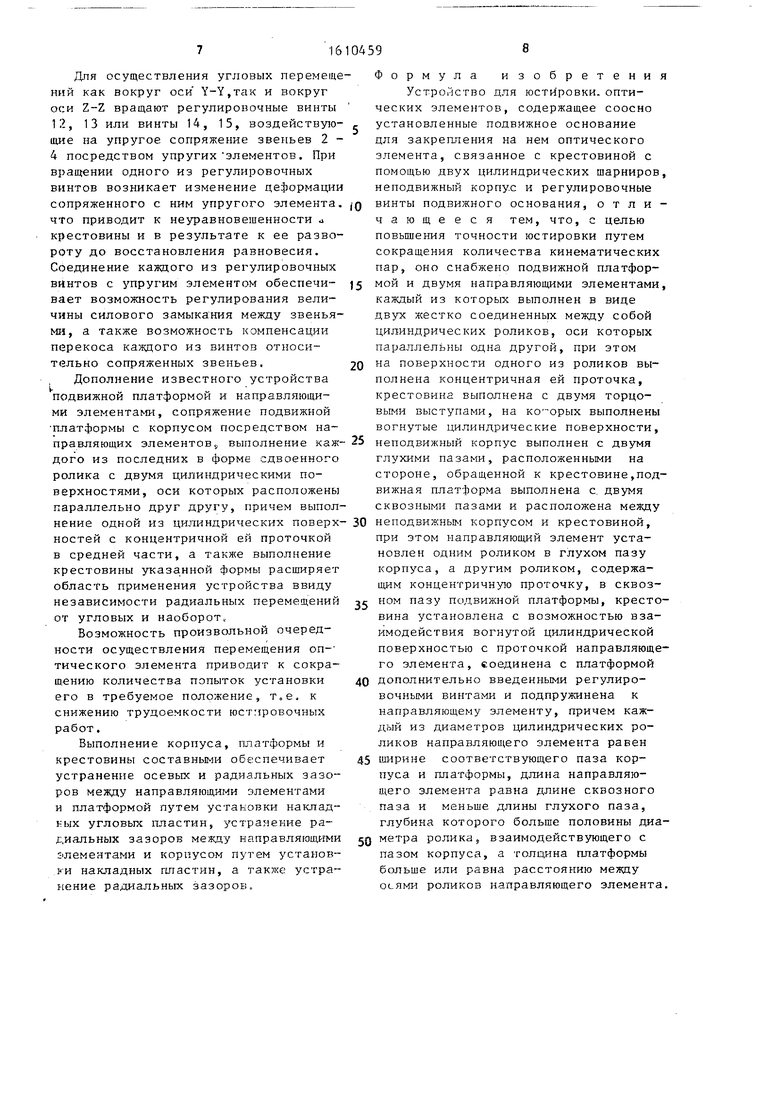
Направляющий элемент 6 выполнен в виде сдвоенного ролика с двумя цилиндрическими поверхностями 31, 32 (фиг. 3), оси которых расположены параллельно друг другу, образованног скрепленными посредством, например заклепок роликами. В средней части одного из роликов выполнена проточка концентричная поверхность 32 и образованная выпуклой цилиндрической поверхностью 33 и буртиками (фиг. 3).
Диаметр вогнутых цилиндрических поверхностей 19 выступов 18 (фиг.З) крестовины 3 выполнен равным диаметр выпуклых цилиндрических поверхностей проточек выступов основания 2 и диаметрам выпуклых цилиндрических поверностей проточбк направляющих элементов 6, а расстояние между боковыми поверхностями выступов 18 крестовины 3 выполнено равным расстоянию между буртиками проточек выступов основания 2 и расстоянию между буртиками .проточек направляющих элементов 6. Расстояние между боковыми стен- ками 25 пазов платформы 4 выполнено равным диаметру цилиндрических.поверхностей 32 (фиг. 3) направляющих элементов 6,
Расстояние между боковыми стенками 30 пазов корпуса 5 выполнено равным диаметру цилиндрических поверхностей 31 (фиг. 3) направляющих элементов 6.
а
5 ,
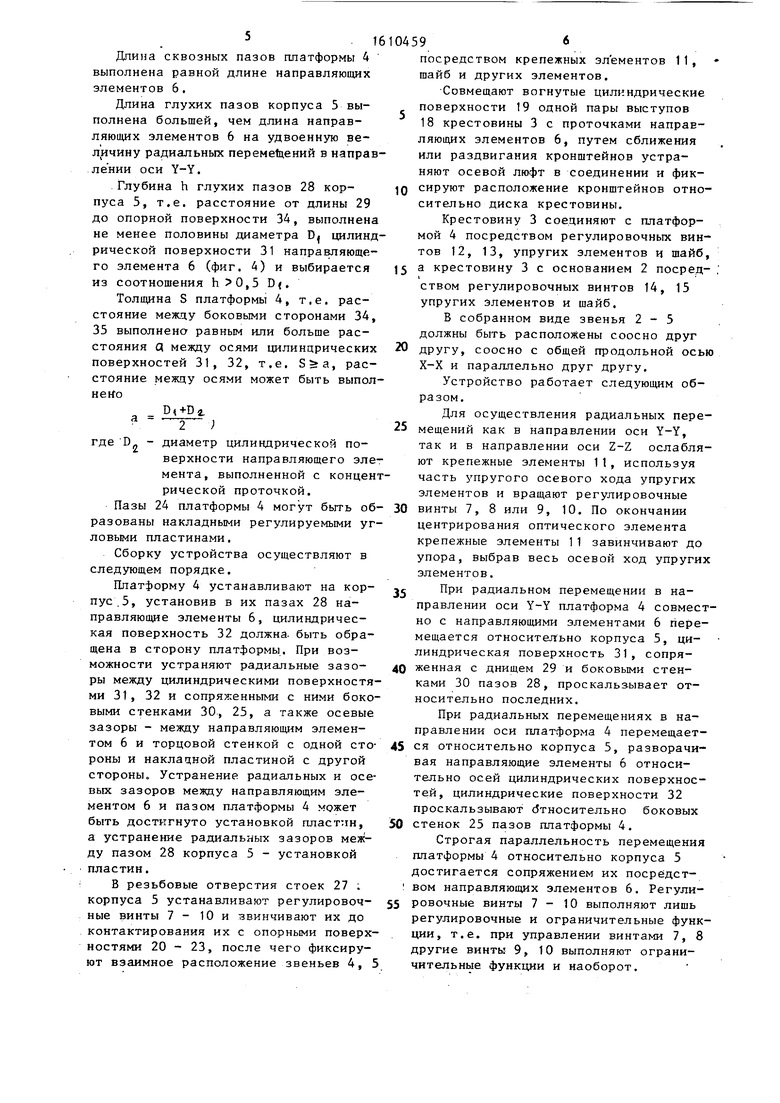
Длина сквозных пазов платформы 4 выполнена равной длине направляющих элементов 6,
Длина глухих пазов корпуса 5 выполнена большей, чем длина направляющих элементов 6 на удвоенную величину радиальных переме1цений в направлении оси Y-Y.
Глубина h глухих пазов 28 корпуса 5, т.е. расстояние от длины 29 до опорной поверхности 34, выполнена не менее половины диаметра D цилиндрической поверхности 31 направляющего элемента 6 (фиг. 4) и выбирается из соотношения ,5 D(.
Толщина S платформы 4, т.е. расстояние между боковыми сторонами 34, 35 выполнено равным или больше расстояния а между осями цилиндрических поверхностей 31, 32, т.е. SSa, расстояние межцу осями может быть выполнено
2 ;
где D - диаметр цилиндрической поверхности направляющего элемента, выполненной с конценрической проточкой.
Пазы 24 платформы 4 могут быть образованы накладными регулируемыми угловыми пластинами.
Сборку устройства осуществляют в следующем порядке.
Платформу 4 устанавливают на корпус. 5, установив в их пазах 28 направляющие элементы 6, цилиндрическая поверхность 32 должна, быть обращена в сторону платформы. При возможности устраняют радиальные зазоры между цилиндрическими поверхностями 31, 32 и сопряженными с ними боковыми стенками 30, 25, а также осевые зазоры - между направляющим элементом 6 и торцовой стенкой с одной стороны и накладной пластиной с другой стороны. Устранение радиальных и осевых зазоров между направляющим элементом 6 и пазом платформы 4 может быть достигнуто установкой пластлн, а устранение радиальных зазоров между пазом 28 корпуса 5 - установкой пластин.
В резьбовые отверстия стоек 27 ; корпуса 5 устанавливают регулировочные винты 7 - 10 и звинчивают их до контактирования их с опорными поверхностями 20 - 23, после чего фиксируют взаимное расположение звеньев 4, 5
0459
посредством крепежных элементов 11, шайб и других элементов.
Совмещают вогнутые цилиндрические поверхности 19 одной пары выступов 18 крестовины 3 с проточками направляющих элементов 6, путем сближения или раздвигания кронштейнов устраняют осевой люфт в соединении и фик- 0 сируют расположение кронштейнов относительно диска крестовины.
Крестовину 3 соединяют с платформой 4 посредством регулировочных винтов 12, 13, упругих элементов и шайб, J5 а крестовину 3 с основанием 2 посред- ; ством регулировочных винтов 14, 15 упругих элементов и шайб.
В собранном виде звенья 2-5 должны быть расположены соосно друг 20 другу, соосно с общей продольной осью X-X и параллельно друг другу.
Устройство работает следующим образом.
Для осуществления радиальных пере- 25 мещений как в направлении оси Y-Y, так и в направлении оси Z-Z ослабляют крепежные элементы 11, используя часть упругого осевого хода упругих элементов и вращают регулировочные 30 винты 7, 8 или 9, 10. По окончании центрирования оптического элемента крепежные элементы 11 завинчивают до упора, выбрав весь осевой ход упругих элементов.
При радиальном перемещении в направлении оси Y-Y платформа 4 совместно с направляющими элементами 6 перемещается относительно корпуса 5, цилиндрическая поверхность 31, сопря- 0 женная с днищем 29 и боковыми стенками 30 пазов 28, проскальзывает относительно последних.
При радиальных перемещениях в направлении оси платформа 4 перемещает- 5 ся относительно корпуса 5, разворачивая направляющие элементы 6 относительно осей цилиндрических поверхностей, цилиндрические поверхности 32 проскальзывают йтносительно боковых 0 стенок 25 пазов платформы 4.
Строгая параллельность перемещения платформы 4 относительно корпуса 5 достигается сопряжением их посредст- вом направляющих элементов 6. Регули- 5 ровочные винты 7-10 выполняют лишь регулировочные и ограничительные функции, т.е. при управлении винтами 7, 8 другие винты 9, 10 выполняют ограничительные функции и наоборот.
Для осуществления угловых перемещений как вокруг оси -У,так и вокруг оси Z-Z вращают регулировочные винты 12, 13 или винты 14, 15, воздействующие на упругое сопряжение звеньев 2 - 4 посредством упругих элементов. При вращении одного из регулировочных винтов возникает изменение деформации сопряженного с ним упругого элемента что приводит к неуравновешенности и крестовины и в результате к ее развороту до восстановления равновесия. Соединение каждого из регулировочных винтов с упругим элементом обеспечивает возможность регулирования величины силового замыкания между звеньями, а также возможность компенсации перекоса каждого из винтов относительно сопряженных звеньев.
Дополнение известного устройства подвижной платформой и направляющими элементами, сопряжение подвижной платформы с корпусом посредством направляющих элементов,, выполнение каждого из последних в форме сдвоенного ролика с двумя цилиндрическими поверхностями, оси которых расположены параллельно друг другу, причем выполнение одной из цилиндрических поверхностей с концентричной ей проточкой в средней части, а такл(е выполнение крестовины указанной формы расширяет область применения устройства ввиду независимости радиальных перемещений от угловых и наоборот.
Возможность произвольной очередности осуществления перемещения оп- тического элемента приводит к сокращению количества попыток установки его в требуемое положение, т.е. к снижению трудоемкости юстмровочных работ.
Выполнение корпуса, платформы и крестовины составньп 1И обеспечивает устранение осевых и радиальных зазо-- ров между направляющими элементами и платформой путем установки накладных угловых пластин, устранение радиальных зазоров между направлягощ ши элементами и корпусом путем установки накладных пластин, а также устранение радиальных зазоров.
Формула изобретения
Устройство для юсти ровки. оптических элементов, содержащее соосно установленные подвижное основание для закрепления на нем оптического элемента, связанное с крестовиной с помощью двух цилиндрических шарниров, неподвижный корпус и регулировочные винты подвижного основания, отличающееся тем, что, с целью повышения точности юстировки путем сокращения количества кинематических пар, оно снабжено подвижной платфор- мой и двумя направляющими элементами, каждый из которых выполнен в виде двух жестко соединенных между собой цилиндрических роликов, оси которых параллельны одна другой, при этом 0 на поверхности одного из роликов выполнена концентричная ей проточка, крестовина выполнена с двумя торцовыми выступами, на которых выполнены вогнутые цилиндрические поверхности, 5 неподвижный корпус выполнен с двумя глухими пазами, расположенными на стороне, обращенной к крестовине,подвижная платформа выполнена с. двумя сквозными пазами и расположена между 0 неподвижным корпусом и крестовиной, при этом направляющий элемент установлен одним роликом в глухом пазу корпуса, а другим роликом, содержа- ащм концентричную проточку, в сквоз- с НОМ пазу подвижной платформы, крестовина установлена с возможностью взаимодействия вогнутой цилиндрической поверхностью с проточкой направляющего элемента, соединена с платформой 0 дополнительно введенными регулировочными винтами и подпружинена к направляющему элементу, причем каждый из диаметров цилиндрических роликов направляющего элемента равен 45 ширине соответствующего паза корпуса и платформы, длина направляю- элемента равна длине сквозного паза и меньше длины глухого паза, глубина которого больше половины диа- 50 метра ролика, взаимодействующего с пазом корпуса, а толщина платформы больше или равна расстоянию между О(ями роликов направляющего элемента.
п
П /J J 27
27
/2
Фиг. 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для юстировки оптического элемента | 1990 |
|
SU1781660A1 |
| Юстировочное устройство | 1989 |
|
SU1707588A1 |
| Устройство опорное | 2021 |
|
RU2784568C1 |
| ТЕЛЕЖКА ДЛЯ ТРАНСПОРТИРОВКИ И СТЫКОВКИ БЛОКОВ | 2004 |
|
RU2273587C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ И ЮСТИРОВКИ ПРИБОРА В ТРЕХ ПЛОСКОСТЯХ | 2003 |
|
RU2234171C1 |
| Абразивный инструмент | 1989 |
|
SU1645125A1 |
| Кассета | 1988 |
|
SU1571540A1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН | 2000 |
|
RU2166399C1 |
| ПОСЕВНОЙ КОМБИНИРОВАННЫЙ АГРЕГАТ | 1997 |
|
RU2126199C1 |
| Многоцелевой станок | 1989 |
|
SU1660937A1 |
Изобретение относится к области оптического приборостроения, в частности к юстировочным устройствам. Изобретение направлено на повышение точности юстировки. Указанные цели достигаются благодаря тому, что устройство дополнительно снабжено подвижной платформой и по меньшей мере одним направляющим элементом, для установки которого корпус выполнен с глухим, а платформа - со сквозным пазом. Основание имеет выступ полуцилиндрической формы с концентричной проточкой. Направляющий элемент выполнен в виде сдвоенного ролика с двумя цилиндрическими поверхностями, оси которых расположены параллельно одна другой, причем на одной из цилиндрических поверхностей выполнена концентричная ей проточка. Направляющий элемент установлен с возможностью взаимодействия поверхностью, обращенной к крестовине и содержащей проточку, со сквозным пазом платформы, а другой цилиндрической поверхностью - с глухим пазом корпуса. Каждый из диаметров цилиндрических поверхностей выполнен равным ширине соответствующего паза, а длина направляющего элемента - равной длине паза корпуса. Крестовина выполнена с двумя вогнутыми цилиндрическими поверхностями, расположенными на торцовых выступах. Крестовина соединена как с платформой, так и с основанием двумя парами диаметрально расположенных и накрестлежащих подпружиненных упругими элементами регулировочных винтов, которые обеспечивают как возможность регулирования величины силового замыкания между соединяемыми звеньями, так и с возможностью компенсации перекоса регулировочных винтов относительно последних. Глубина H глухого паза корпуса выполнена удовлетворяющей соотношению H*980,5D1, где D1 - диаметр цилиндрической поверхности направляющего элемента, взаимодействующей с пазом корпуса. Толщина S платформы определена из соотношения S≥D1+D2)/2, где D2 - диаметр цилиндрической поверхности направляющего элемента, выполненной с концентричной проточкой. 3 ил.
J8
27
| Координатное устройство | 1976 |
|
SU682953A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
