Изобретение относится к механизации погрузочно-разгрузочных работ, а именно к приводам сбалансированны I манипуляторов
I Целью изобретения является повы- :шение КПД гидропривода за счет обеспечения автоматического переключения :на рекуперативный режим в зависимос- ;ти от нагрузки
: На чертеже показана принципиальная схема устройства.,
Гидропривод манипулятора состоит из гидроципиндра 1, штоковая полость 2 и поршневая полость 3 которого че- :рез гидрозамок 4 и основной распре- |делитель 5 соединяется с напорной 6 и возвратной 7 гидролиниями насосной станции 8, включающей в себя бак 9, насос 10, обратный клапан 11, гидроаккумулятор 12, датчики 13 и 14 давления, предохранительный клапан 15, Возвратная линия 7 соединена с двух- |позиционным распределителем 16, выхо |ды которого соединены с дросселем 17 ролзучей скорости и регулятором 18 |Потока„ Выходы дросселя 17 и регуля- |тора 18 потока связаны с входом допол |нительного гидроуправляемого распре- рчелителя 19, выходы которого соеди- |нены соответственно с напорной 6 и Ьливной 20 гидролиниями„ ; Второй основной распределитель |21 связывает полости 2 и 3 гидроци- чиндра 1 с полостями 22, 23 управле- |ния распределителя 21 „ В полости 23 установлена пружина 24 для обеспече- я требуемого перепада давления„ I Гидропривод манипулятора работает следующим образом
Для подъема груза G основные распределители 5 и 21 переключаются в Положение а , жидкость из напорной гидролинии б насосной станции 8 поступает в поршневую полость 3 гидро- Цилиндра 1, поршень которого начинает перемещаться вверх Жидкость, вытесняемая из штоковой полости 2 Гидро1щлиндра 1, поступает через распределитель 5 в возвратную линию 7 и далее на вход распределителя 16 Йри быстром подъеме груза распределитель 16 находится в выключенном положении, жидкость с его выхода поступает через регулятор 18 потока на 1()ход гидроупр.авляемого распределите- Ля 19„
Одновременно через включенный в «ол ожение q распределитель 21 порш117274
невая полость 3 гидроцилиндра 1 содиняется с полостью 23 управления распределителя 19, а штоковая полос 5 2-е полостью 22 „
Если груз G незначителен или отсутствует, то давление в штоковой полости 2 гидроцилиндра 1 будет пре вьш1ать давление в его поршневой по- 10 лости 3. Тогда усилие, действующее в полости 22 распределителя 19, превышает суммарное усилие, создаваемо пружиной 24 и давлением нагнетания в его полости 23„ Распределитель 19 15 переключится вправо, его вход соединяется с напорной линией 6 насосной станции 8, жидкость из штоковой полости 3 гидроцилиндра 1 поступает по возвратной линии 7 в напорную ли 20 нию 6 о В то же время жидкость от насоса 10 подается в гидросистему, одновременно в аккумулятор 12„ При ДОСтижении. определенного давления,- обусловленного настройкой датчиков 25 14 давления,, насос 10 отключается, а в систему подается жидкость от аккумулятора 12„
;. Для опускания груза G распределители 5, 21 включаются в положение S 30 Жидкость из напорной гидролинии 6 поступает в штоковую полость 2 гидроцилиндра 1. Жидкость, вытесняемая из поршневой полости гидроцилиндра 1 поступает аналогично циклу подъема 35 гидроцилиндра 1 в зависимости от необходимости обеспечения быстрой или ползучей скорости движения гидроцилиндра соответственно на регулятор 18 потока или дроссель 17, 40 Одновременно через включенньш в положение 8 распределитель 21 поршневая полость 3 гидроцилиндра соединяется с полостью 22 управления распределителя 19, а штоковая полость 45 2 - с полостью 23
Если груз G достаточно велик, то давление в поршневой полости 3 гидроцилиндра 1 может превосходить давление нагнетания Тогда усилие, 50 действующее от давления в поршневой полости 3 гидроцилиндра 1, в управляющей полости 22 распределителя 19 превышает суммарное усилие от давления- нагнетания и пр-ужины 24, дей- 55 ствующее в его Т1равляющей полости 23, Распределитель 19 переключается вправо, его вход соединяется с напорной гидролинией 6 насосной станщш 8. В результате ж-идкость из поршневой полости 3 поступает в напорную гидролинию 6 и далее в аккумулятор 12 насосной станции 8 о
Таким образом, осуществляется автоматическое переключение в режим рекуперации в зависимости от нагрузки, что позволяет снизить КПД предлагаемого гидропривода.
Формула изобретени
Гидропривод сбалансированного манипулятора, содержащий гидроцилиндр вертикального перемещения исполнительного органа манипулятора, рабочие полости которого через гидрозамок, по крайней мере два основных распределителя, регулятор потока и дроссель соединены с напорной и возвратной гидролиииями насосной
276.
станции, имеющей гидроаккумулятор и сливную гидролинию, отличающийся тем, что, с целью повышения КПД за счет обеспечения автоматического переключения насосной станции на рекуперативный режим в зависимости от внешней нагрузки исполнительного органа манипулятора, он снабжен дополнительным гидроуправ ляемым распределителем, вх од которого подключен к возвратной гидролинии первого основного распределителя- насосной станции, а его выходы - соответственно с напорной и сливной гидролиниями, причем управляющие пало,сти дополнительного гидроуправпяемого распределителя соединены через второй основной распределитель с палйс- тями гидроцилиндра.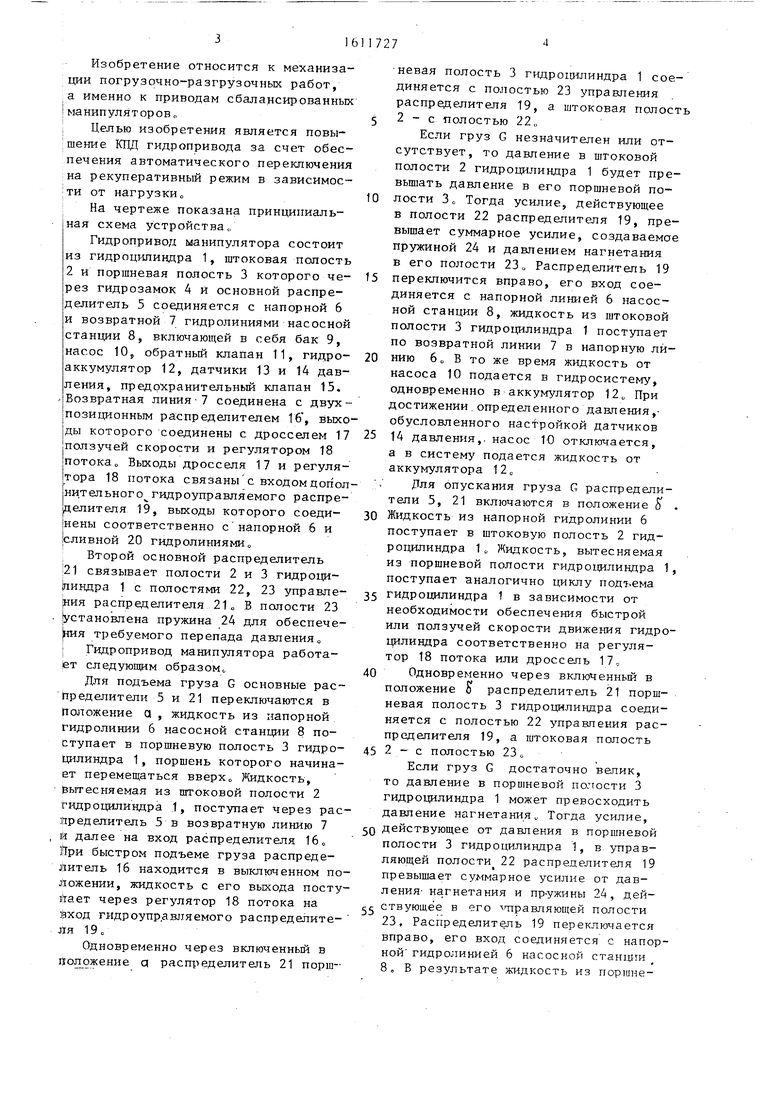
| название | год | авторы | номер документа |
|---|---|---|---|
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| Гидропривод шагового толкателя | 1987 |
|
SU1523746A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2061914C1 |
| ГИДРОПРИВОД | 2016 |
|
RU2665762C2 |
| Гидросистема специального оборудования транспортно-заряжающей машины на колесном шасси | 2021 |
|
RU2787601C1 |
| Гидравлический привод инерционного вибропресса | 1977 |
|
SU707670A1 |
| Рекуперативный гидропривод лесовозного автомобиля с прицепом | 2023 |
|
RU2810823C1 |
| ГИДРОСИСТЕМА | 1992 |
|
RU2040709C1 |
| Гидропривод манипулятора | 1981 |
|
SU1049687A1 |
| Рекуперативный гидропривод лесовозного автомобиля | 2017 |
|
RU2668093C1 |
Изобретение относится к области механизации погрузочно-разгрузочных работ, а именно к приводам сбалансированных манипуляторов. Целью изобретения является повышение КПД гидропривода за счет обеспечения автоматического переключения на рекуперативный режим в зависимости от нагрузки. Автоматическое переключение осуществляется при подъеме малого груза, когда при включенных в положение "а" распределителях 5 и 21 полости 2 и 3 силового цилиндра соединяются с полостями соответственно 22 и 23 управления распределителем 21, который, переключаясь вправо, соединяет возвратную линию 7 распределителя 5 с напорной гидролинией 6. Аналогичное переключение осуществляется и при опускании груза большой величины, обеспечивая зарядку аккумулятора 12 при одновременной разгрузке насоса 10. 1 ил.