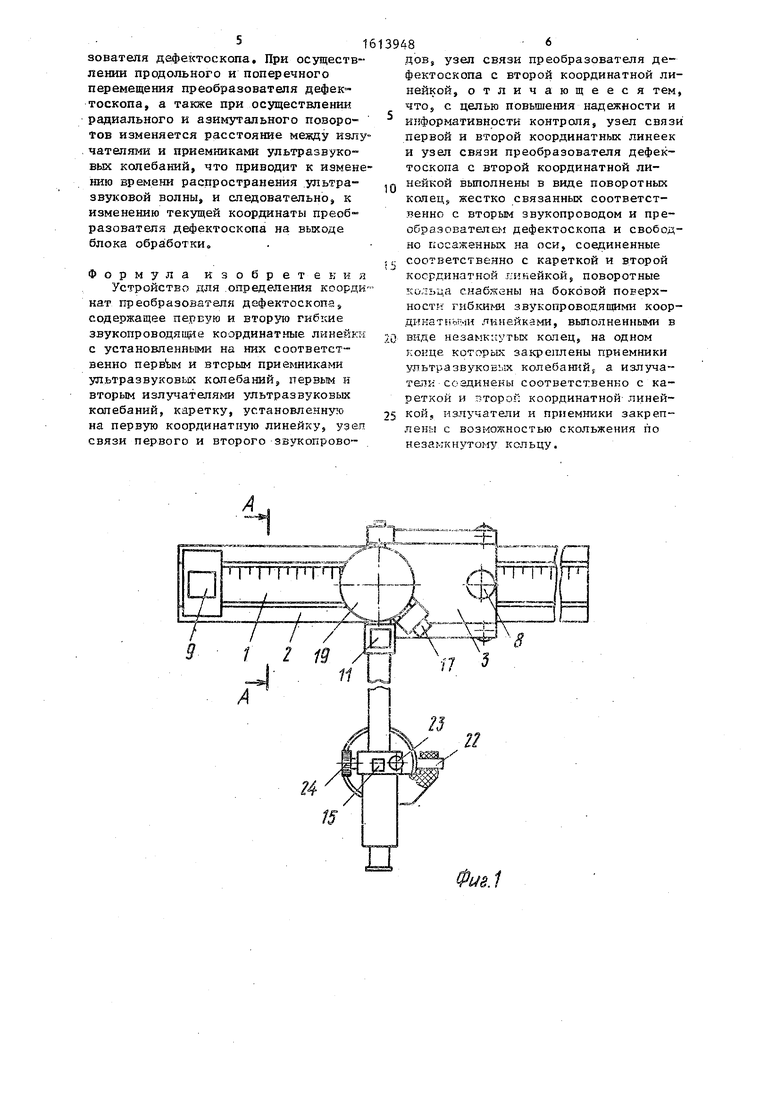
с пресбразователем дефектоскопа 6 о помощЕ.ю узла 7 связи. Каретка снабжена raicsce прижимным винтом 8 „ На координатной линейке 1 закреплен пер- .звый приемник 9, а- в основании каретки - первый, излучатель 10 ультразву- ковых. колебаний с возможностью скольжения по первой линейке 1,
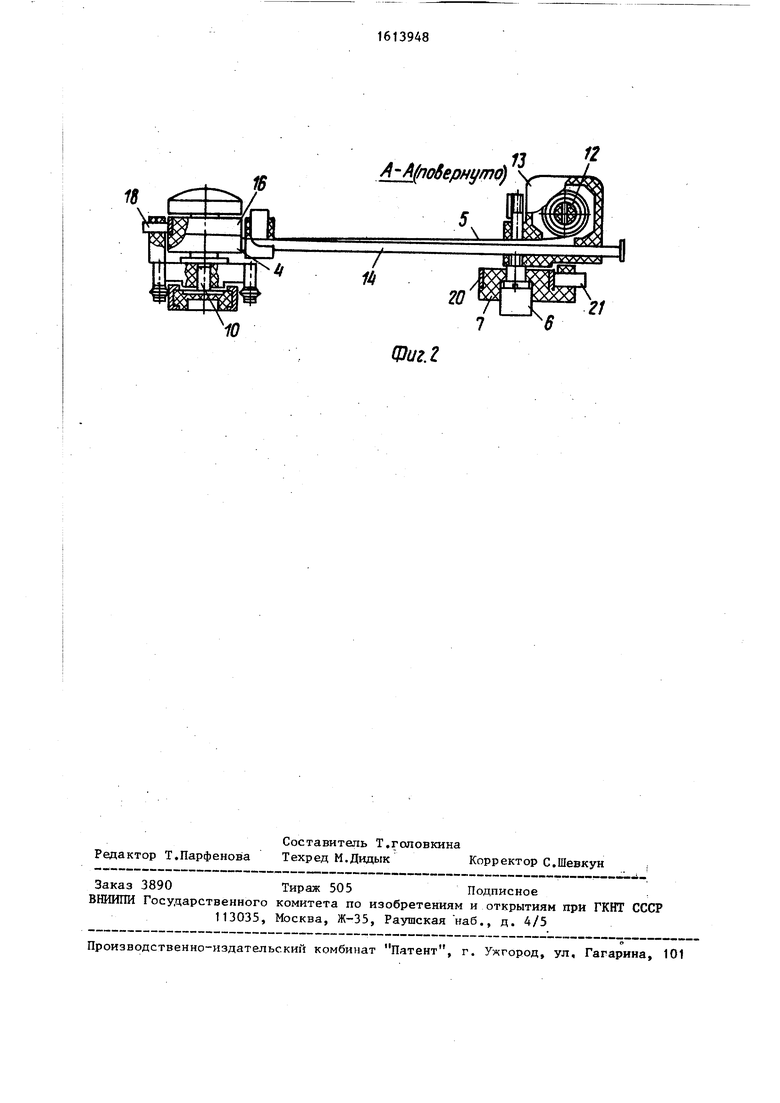
Вторая координатная линейка 5 выполдена в виде звукопроводящей ленты, один конец которой закреплен в у:ше 4 связи и содержит второй приемник 11 ультразвуковых колеба- НИИ, другой конец закреплен на роторе пружинного двигателя 12 и находится в корпусе 13, Корпус 13 имеет йозможность перемещения по планке 14, конец которой связан с узлом 4 связио К корпусу 13 присоединен второй излучатель 15 колебаний ультра- .звука непосредственно над вторым звуководомо
Узел 4 связи выпоитнен составным и представляет из себя поворотное кольцо, жестко связанное со второй координатной линейкой.5 и свободно посаженное на ось, соединенную с кареткой 3. На боковой поверхности копьца укреплена гибкая звукопроводящая координатная линейка 16 выполненная в виде незамкнут: огс коль- цаг на одном конце которого закреплен приемш-JK 17 ультразвуковьсс колебаний, принимаюпщй колебания от излучателя 18, связанного с кареткой 3 с помощью кронштейна Положение узла связи может быть зафиксировано с помощью прижима 19,
Преобразователь дефектоскопа 6 связан с корпусом второй координатной линейкой 5 .с помощью узла 7 связи, выполненного в виде поворотного кольца, жестко связанного с держателем преобразователя дефектоско- па и свободно посаженного на осьэ соединенную с корпусом 13„ На боковой поверхности узла сопряжения закреплена гибкая звукопроводящая линейка 20, выполненная в виде незамкнутого кольца и содержащая на одном конце приемник 21 колебаний ультразвука, принимающий ультразвуковую волну от изл гчателя 22, связанного с корпусом второго звуковода с помощью кронштейна.
Устройство работает следующим оразом.
Ь
45
50
55
Устройство закрепляется на конт ролируемом изделии (в случае.магнитного материала, например, с помощью мап-штов, в случае немагнитного, например j на присосках) параллельно контролируемому шву таким образом, чтобы преобразователь дефектоскопа находился у точки начала координат, выбранной оператором
Производится подключение принимающих И излучающих преобразователей к соответственньш каналам блока обработки (не показан), а также преобразователя дефектоскопа к входу .дефектоскопа. Положение узла 4 связи фиксируется с помощью прижина 19, Псло/кение преобразователя дефектоскопа фиксируется с помощью винта 23о. Затем осуществляют С /анирование преобразователем по поверхности изделияj причем продольное перемещение обес- печивае 1;ся движением каретгси 3, поперечное - удлинением или укорачиванием координатной линейкк 5с При обнаружении дефекта положение карет- Kir 3 фиксируется на основании 2 с помощью винта 8. положение узла 7 связи фиксируется на планке 14 с помощью винта, 24;, и далее производится радиальное и азимутальное прозвучивание путем поворота влево и вправо второй координатной линейки и ушта 7 связИо Истгользование в качестве держатапя преобразователя дефектоскопа например шарнира Гука, позволяет производить скаютрование изделий с шероховатой или неровной поверхностью., что повышает надежность
контрОЛЯ а
В предлагаемом устройстве в стве излучателей 10, 15, 18 и 22 использованы ЗМЛ--преобразователи, что обеспечивает надежность ввода ультразвука в координатные линейки бесконтактным способом при скольжении излучатепей по последним.
Принцип определения координат преобразователя дефектоскопа заключается в следующем. Излучатели 10, 15, 18 и 22 возбуждают в координатных линейках ультразвуковые волны, которые принимаются приемниками 9, 11, ,17 и 21 соответственно. -Эти сигналы поступают на элек.троннгзй блок обработки (не показан), г.де стандартным образом происхопит преобразование времени распространения ультразвуковых колебаний в координаты преобраоватепя дефектоскопа. При осуществении продольного и поперечного еремещения преобразователя дефектоскопа, а также при осуществлении адиального и азимутального поворотов изменяется расстояние между нзлу- чателями и приемниками ультразвуковых колебаний, что приводит к изменению времени распространения ультра- звзпсовой волны, и следовательно, к изменению текущей координаты преобразователя дефектоскопа на выходе блока обработки.
Формула изобретения
Устройство для .определения координат преобразователя дефектоскопа содержащее первую и вторую гибкие звукопроводящие координатные линейкк с установленными на них соответственно первом и вторым приемниками ультразвуковых колебаний, первым и вторым излучателями ультразвуковых колебаний, каретку, установленнуто на первую координатную линейку, узеп связи первого и второго звукопрово
5
дов, узел связи преобразователя дефектоскопа с второй координатной линейкой, отличающееся тем, что, с целью повьшения надежности и информативности контроля, узел связи первой и второй координатных линеек и узел связи преобразователя дефектоскопа с второй координатной линейкой вьтолнены в виде поворотных колец, жестко связанных соответственно с вторым звукопроводом и преобразователем дефектоскопа и свободно посаженных на оси, соединенные соответственно с кареткой и второй косрдинатной линейкой, поворотные кольца снабжены на боковой поверхности гибкими звукопроводя цими коор- дикатЕгыми линейками, выполненными в виде HesaNsKMyrbK колец, на одном конце которык закреплены приемники ультразвуковых колебаниЙ а излучатели со здинены соответственно с кареткой и второй координатной- линейкой, излучатели и приемники закреплены с возможностью скольжения по незамкнутому кольцу.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения координат преобразователя дефектоскопа | 1984 |
|
SU1179212A1 |
| Устройство определения координат преобразователя дефектоскопа | 1984 |
|
SU1221593A1 |
| Ультразвуковой способ оценки дефектов в головке рельсов и определения профиля поверхности катания | 2022 |
|
RU2785302C1 |
| Устройство для считывания графической информации | 1976 |
|
SU634315A1 |
| Устройство для считывания графической информации | 1980 |
|
SU934514A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО ИЗМЕРЕНИЯ РАСХОДА ЖИДКОСТИ | 1994 |
|
RU2100780C1 |
| Устройство для преобразования координат точек графического изображения в электрические сигналы | 1983 |
|
SU1088033A1 |
| УСТРОЙСТВО ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КАЧЕСТВА ОБОЛОЧЕК, ИМЕЮЩИХ ФОРМУ ТЕЛ ВРАЩЕНИЯ, И НАКЛАДНОЙ ИМИТАТОР ДЕФЕКТОВ | 2007 |
|
RU2334226C1 |
| Поверочная установка для аппаратуры акустического каротажа | 1985 |
|
SU1287075A1 |
| Акустическое устройство для измерения угловых перемещений | 1983 |
|
SU1145276A1 |
Изобретение относится к неразрушающему контролю, например ультразвуковому, и может быть использовано в любой отрасли промышленности для контроля сварных швов и основного материала, выполненного как из магнитного, так и из немагнитного материалов. Целью изобретения является повышение надежности и информативности контроля. Для этого устройство, содержащее первую и вторую гибкие звукопроводящие координатные линейки с установленными на них соответственно первым и вторым приемниками УЗ-колебаний, первым и вторым излучателями УЗ-колебаний, каретку, установленную на первую координатную линейку, узел связи первого и второго звукопроводов, узел связи преобразователя дефектоскопа с второй координатной линейкой, снабжено дополнительными поворотными кольцами, жестко связанными соответственно с вторым звукопроводом и преобразователем дефектоскопа и свободно посаженными на оси, соединенные соответственно с кареткой и второй координатной линейкой. Поворотные кольца снабжены на боковой поверхности гибкими звукопроводящими координатными линейками, выполненными в виде незамкнутых колец, на одном конце которых закреплены УЗ-приемники, а излучатели соединены соответственно с кареткой и второй координатной линейкой с возможностью скольжения по незамкнутому кольцу. 2 ил.
7 3
гг
18
16
А-А(поВернуто) 5
13
12
21
Фиг. г
| Устройство определения координат преобразователя дефектоскопа | 1984 |
|
SU1179212A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
