0 8 J) 8
5 ;; V ш
ЦЖаГИС 1 I .
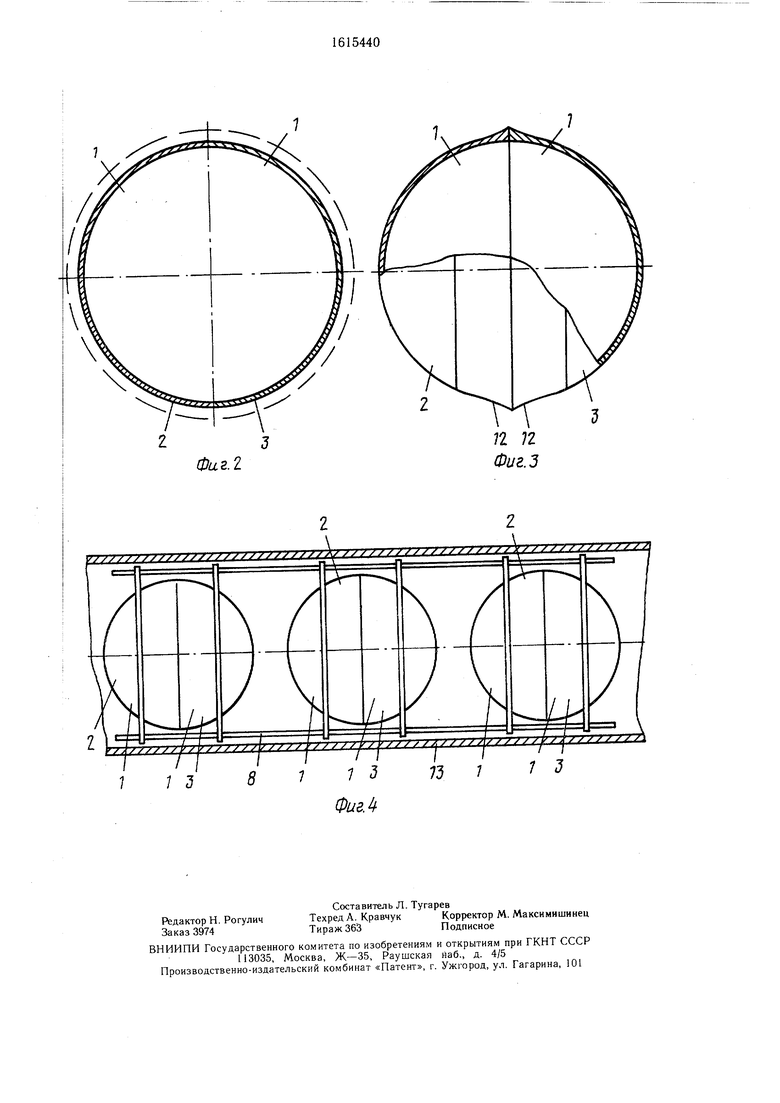
Несколько камер 1, (фиг. 4), образованных оболочками 2 и 3, установлено последовательно посредством фланцев 4 и 5 на общих осях 8 в цилиндрическом корпусе 13.
Изобретение относится к машинострое-сферы камеры 1 за счет деформирования
нию, а именно к мартенситным двигателямоболочек 2 и 3 (пунктиром на фиг. 2 покас термочувствительными элементами иззано исходное состояние оболочек d}.
материала обладающего свойством термоме-После этого положение оболочек 2 н 6 фик- ханической памяти (преимущественно из g сируют фланцами 4 и ,5 и осями 8, регулируя
титановых сплавов), и может быть исполь-поджатие пружин 11 гайкамиJU. зовано, например, в подводном судостроении для изменения плавучести различных технических объектов.
Целью изобретения является повышениещих осях о и uMjinnAt nic ixv m ,.4.-- - надежности при работе в условиях высоких Ю Последний выполнен негерметичным, служит
давлений а также повышение технологич-для придания аппарату обтекаемой формы
и может быть изготовлен как из металла
на фиг , . изображен ар..нь, ,,™. .„к™ГскГь- ,,1Г„.1Пв„ г , «у «« ,еах сторон „.гружен ,е.я; Sa ф „г. 3 - ,увст.и,...е - -- „ „ - - „„еский объект ко„„.ек.
туют одной или несколькими камерами так, чтобы после сборки вес объекта был больще его водоизмещения, а после проявления памяти и увеличения диаметра сферических оболочек 2 и 3 водоизмещение объекта становилось больще его веса.
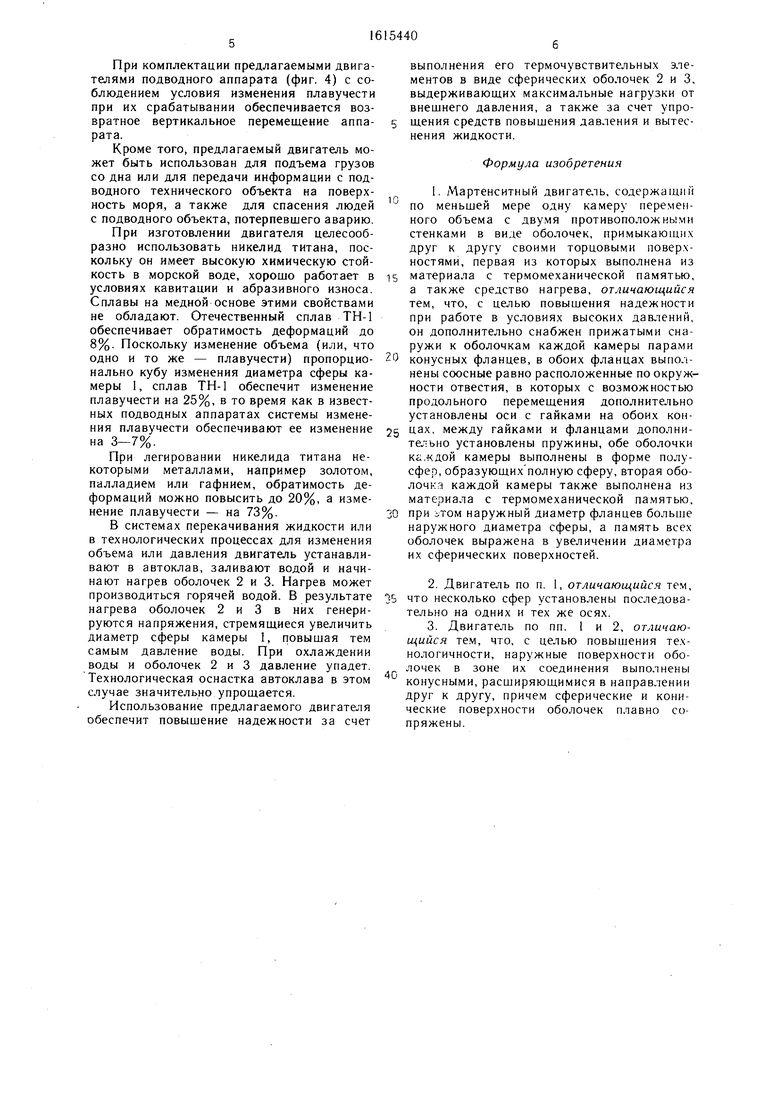
элементы с конусными наружными поверх ностями в зоне их соединения; на фиг. 4 --- двигатель в качестве отсека переменной плавучести подводного аппарата (гайки и . пружины для установки соединительных фланцев не показаны).
Двигатель содержит по меньщей мере одну камеру 1 переменного объема с двумя противоположными стенками в виде оболочек 2 и 3, примыкающих друг к другу своими 25 торцовыми поверхностями. Оболочки 2 и 3 каждой камеры 1 выполнены в форме полусфер, образующих полную сферу, из материала с термомеханической памятью формы. Память оболочек 2 и 3 выражена в увеличе- .цы 4 и 5 обеспечивак. . нагоева оболочек 2 и 3, которое можетфиксацию положения оболочек 2 и в первобпть выполнено в виде э.чектрической спи-нача.аьный момент. При погружении гидроа1 гГ н Г Га.ь-снГ ГЛГГ оГеГеГ.айГ ГаГежГ :::
.-ri -
Двигатель работает следующим образом.
Собранный объект опускают в воду, и он погружается под действием отрицатепьной плавучести. При включении средства нагрева диаметр сферы камеры увеличивается, что приводит к увеличению ее объема, изменению знака плавучести и всплытию
1 DI ,
меры 1 своими конусными участками 6 и 7. В обоих фланцах 4 и 5 выполнены соосные равно расположенные по окружности отверстия, в которых с возможностью продоль- Q ного перемещения установлены оси 8 с шайбами 9 и гайками 10 на обоих концах для регулировки усилия прижатия оболочек 2 и 3 друг к другу. Между шайбами 9 и фланцами 4 и 5 установлены пружины
сжимаются с силой 2000000 кг). При увеличении диаметра сферы камеры 1 в процессе формовосстановления оболочки 2 и 3 раздвигают фланцы 4 и 5, при этом пружины 11 практически не препятствуют формо- восстановлению.
Двигатель может найти применение в подводной технике при проведении глубоководных работ с кабельной связью (обес УЖн Гд еУрТланцев 4 и ТбГл ьще-45 печенТе соТранности кабеля). Известны слунаоужно о диметра сферы оболочек 2 и 3.чаи, когда кабель рвался под действием
Несколько сферичес и с камер 1 (фиг. 4)собственного веса и тонул. Предлагаемьш
могут бь°ть установлены последовате.1ьно надвигат и устанавливают вдоль кабеля
ояшх и тех же осях 8. Наружные поверх-определенном расстоянии друг от друга так,
ности 12 оболочек 2 и 3 в зоне их соединениячтобы обеспечивалось условие изменения
могут быть ыполиены конусными (фиг. 3),50 плавучести кабеля при «х срабатывании
пясп иояюшимися в направлении друг кВ процессе эксплуатации кабеля двигатели
другу сферические и коническиеобеспечивают его плавучесть и Уменьшение
поверхности оболочек 2 и 3 плавно сопря-нагрузки на последующие участки. При вклюповерхнос1и иииличс г средства нагрева двигателей кабель
при сборке двигателя оболочки 2 и 3 сты-всплывает. Необходимо отметить, что утеря
куют торцо ыми поверхностями до образо-55 абеля при его обрыве возвраще
г 1.„ ..„„,,„, /пиоп.имя пгтяврпрягтва на базу для его замены.
вания сферы и обжимают наружным (пневматическим или гидростатическим) давлением, что вызывает уменьшение диаметра
ния плавсредства на базу для его замены. Это значительно увеличивает стоимость и сроки подводных работ.
ЦЖаГИС 1 I .
Несколько камер 1, (фиг. 4), образованных оболочками 2 и 3, установлено последовательно посредством фланцев 4 и 5 на общих осях 8 в цилиндрическом корпусе 13.
поджатие пружин 11 гайкамиJU.
щих осях о и uMjinnAt nic ixv m ,.4.-- - Последний выполнен негерметичным, служит
Двигатель работает следующим образом.
Собранный объект опускают в воду, и он погружается под действием отрицатепьной плавучести. При включении средства нагрева диаметр сферы камеры увеличивается, что приводит к увеличению ее объема, изменению знака плавучести и всплытию
сжимаются с силой 2000000 кг). При увеличении диаметра сферы камеры 1 в процессе формовосстановления оболочки 2 и 3 раздвигают фланцы 4 и 5, при этом пружины 11 практически не препятствуют формо- восстановлению.
Двигатель может найти применение в подводной технике при проведении глубоководных работ с кабельной связью (обеспеченТе соТранности кабеля). Известны слу абеля при его обрыве возвраще
имя пгтяврпрягтва на базу для его замены.
ния плавсредства на базу для его замены. Это значительно увеличивает стоимость и сроки подводных работ.
При комплектации предлагаемыми двигателями подводного аппарата (фиг. 4) с соблюдением условия изменения плавучести при их срабатывании обеспечивается возвратное вертикальное перемещение аппарата.
Кроме того, предлагаемый двигатель может быть использован для подъема грузов со дна или для передачи информации с подводного технического объекта на поверхность моря, а также для спасения людей с подводного объекта, потерпевшего аварию.
При изготовлении двигателя целесообразно использовать никелид титана, поскольку он имеет высокую химическую стойкость в морской воде, хорошо работает в условиях кавитации и абразивного износа. Сплавы на медной основе этими свойствами не обладают. Отечественный сплав ТН-1 обеспечивает обратимость деформаций до 8%. Поскольку изменение объема (или, что одно и то же - плавучести) пропорционально кубу изменения диаметра сферы камеры 1, сплав ТН-1 обеспечит изменение плавучести на 25%, в то время как в известных подводных аппаратах системы изменения плавучести обеспечивают ее изменение на 3-7%.
При легировании никелида титана некоторыми металлами, например золотом, палладием или гафнием, обратимость деформаций можно повысить до 20%, а изменение плавучести - на 73%.
В системах перекачивания жидкости или в технологических процессах для изменения объема или давления двигатель устанавливают в автоклав, заливают водой и начинают нагрев оболочек 2 и 3. Нагрев может производиться горячей водой. В результате нагрева оболочек 2 и 3 в них генерируются напряжения, стремящиеся увеличить диаметр сферы камеры 1, повышая тем самым давление воды. При охлаждении воды и оболочек 2 и 3 давление упадет. Технологическая оснастка автоклава в этом случае значительно упрощается.
Использование предлагаемого двигателя обеспечит повышение надежности за счет
выполнения его термочувствительных элементов в виде сферических оболочек 2 и 3, выдерживающих максимальные нагрузки от внешнего давления, а также за счет упро- щения средств повышения давления и вытеснения жидкости.
Формула изобретения
0
1. Мартенситный двигатель, содержащий по меньшей мере одну камеру переменного объема с двумя противоположными стенками в виде оболочек, примыкающих друг к другу своими торцовыми поверхностями, первая из которых выполнена из
5 материала с термомеханической памятью, а также средство нагрева, отличающийся тем, что, с целью повышения надежности при работе в условиях высоких давлений, он дополнительно снабжен прижатыми снаружи к оболочкам каждой камеры парами
0 конусных фланцев, в обоих фланцах выполнены соосные равно расположенные по окружности отвестия, в которых с возможностью продольного перемещения дополнительно установлены оси с гайками на обоих кон5 цах. между гайками и фланцами дополнительно установлены пружины, обе оболочки ка.кдой камеры выполнены в форме полусфер, образующих полную сферу, вторая оболочка каждой камеры также выполнена из материала с термомеханической памятью,
0 при iTOM наружный диаметр фланцев болыие наружного диаметра сферы, а память всех оболочек выражена в увеличении диаметра их сферических поверхностей.
2.Двигатель по п. 1, отличающийся тем, 5 что несколько сфер установлены последовательно на одних и тех же осях.
3.Двигатель по пп. 1 и 2, отличающийся тем, что, с целью повышения технологичности, наружные поверхности оболочек в зоне их соединения выполнены
0
конусными, расширяющимися в направлении друг к другу, причем сферические и конические поверхности оболочек плавно сопряжены.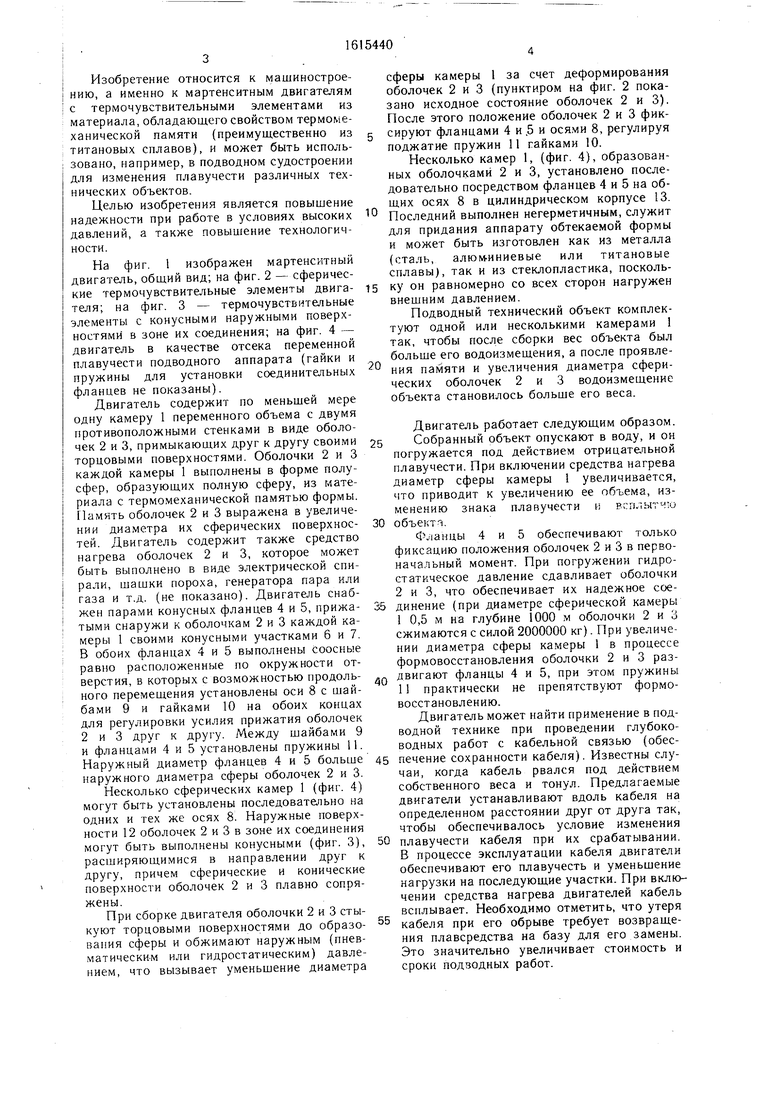
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНОЕ СУДНО | 2016 |
|
RU2702464C1 |
| Способ работы мартенситного двигателя | 1988 |
|
SU1560785A1 |
| АКУСТИЧЕСКИЕ РЕФЛЕКТОРЫ | 2010 |
|
RU2562919C2 |
| СПОСОБ ТРАНСПОРТИРОВКИ НЕГАБАРИТНЫХ ПОДВОДНЫХ ОБЪЕКТОВ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2500569C2 |
| СПОСОБ РЕМОНТА ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБ И СПОСОБ ИЗГОТОВЛЕНИЯ БАНДАЖА ДЛЯ РЕМОНТА ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБ | 2002 |
|
RU2235188C2 |
| ЗАГЛУШКА СОПЛА РАКЕТНОГО ДВИГАТЕЛЯ | 2008 |
|
RU2372513C1 |
| Способ позиционирования подводных аппаратов при плавании по постоянному маршруту | 2022 |
|
RU2785215C1 |
| Способ позиционирования подводных аппаратов | 2019 |
|
RU2717161C1 |
| Всплывающий аварийно-информационный радиобуй с надувной сферической спиральной антенной декаметрового диапазона | 2021 |
|
RU2763846C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ЖАРОВОЙ ТРУБЫ В КОРПУСЕ КАМЕРЫ СГОРАНИЯ | 2001 |
|
RU2223448C2 |
Изобретение позволяет повысить надежность и технологичность мартенситных двигателей с термочувствительными элементами в виде оболочек 2 и 3 из материала с памятью формы при работе в условиях высоких давлений и может быть использовано, например, в подводном судостроении для изменения плавучести различных технических объектов. Двигатель содержит по меньшей мере одну камеру 1, образованную двумя полусферическими оболочками 2 и 3, образующими полную сферу. Память оболочек 2 и 3 выражена в увеличении диаметра их сферических поверхностей. При нагреве погруженных в жидкость оболочек 2 и 3 увеличивается диаметр камеры 1 и изменяется ее плавучесть. За счет этого может быть обеспечено возвратное вертикальное перемещение различных подводных объектов или увеличение давления в автоклаве. Надежность и технологичность двигателя повышены за счет сферической формы камеры 1 с высокой удельной прочностью, а также за счет простоты выполнения средства вытеснения жидкости. 2 з.п. ф-лы, 4 ил.
| Тепловой двигатель | 1986 |
|
SU1321907A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Тепловой двигатель | 1987 |
|
SU1539391A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
