Изобретение относится к судостроению, в частности к морской подводной технике, и касается независимо от типа используемых энергетических установок подводных судов, оснащенных аварийно-спасательными средствами для всего экипажа.
Известен способ эвакуации экипажа с аварийной подводной лодки и устройство для его осуществления по патенту РФ на изобретение (RU 2149123, B63G 8/40, 20.05.2000).Устройство включает герметичную камеру в виде цилиндрической капсулы с системами жизнеобеспечения и управления. Капсула помещена в пусковую шахту, прикрытую крышкой и оснащенную энергетическим средством для катапультирования капсулы. На наружной поверхности капсулы смонтированы поплавки, эластичные направляющие и обтюрирующие пояса, а также герметичные двери, совпадающие с этажными герметичными дверьми подлодки. Недостаток известного устройства -невозможность собрать весь экипаж из отсеков в капсуле особенно при разрушении корпуса, так и его выживание после всплытия из-за отсутствия энергетических и транспортных средств.
Известно подводное аварийно-спасательное судно по патенту США на изобретение (US 3678872, B63G 8/41, 25.06.1972). Оно представляет подлодку, передняя концевая часть которой герметично присоединена к остальной части с возможностью аварийной расстыковки и включает собственный двигатель тяги, пост управления, торпедные трубы и люки для сообщения с основной частью. Это устройство снабжено энергетическими и транспортными средствами, но может обеспечить эвакуацию экипажа при повреждении только задней концевой части без даже частичного повреждения передней части.
Известно подводное судно по патенту РФ на изобретение (RU 2202494, B63G 8/41, 20.04.2003). Оно состоит из двух герметичных корпусов - основного, имеющего силовую установку с атомными реакторами, агрегатами и вооружением, и дополнительного, в котором размещены помещения для всего экипажа, системы жизнеобеспечения, контроля и управления. Дополнительный корпус расположен над основным и соединен с ним замковыми устройствами с дистанционным управлением, электроразъемами и разъемными шлюзовыми камерами с герметичными люками. Недостаток этого подводного судна такой же, как и предыдущего устройства (невозможность эвакуации экипажа даже при частичном повреждении дополнительного корпуса).
Известна также аварийно-спасательная система для спасения экипажа подводной лодки по патенту РФ на изобретение (RU 2229419, B63G 8/41, 10/09/2003). Система представляет собой двухмодульное подводное судно. Это известное подводное судно принято за прототип. Оно имеет оснащенные движителями два автономных модуля -верхнего и нижнего. Нижний модуль является транспортным и оснащен энергетической атомной установкой, средствами для изменения плавучести, функциональными устройства, герметичными емкостями. Верхний модуль является аварийно-спасательным выполнен по типу дизельной подлодки, расположенный в верхней части нижнего модуля, соединен с нижним модулем захватами с гидравлическими или электрическими приводами и имеет средства отделения в виде пиродвигателей с газовой камерой, являющейся дополнительной емкостью для уравнительной цистерны. Модули сообщены переходом с герметичными люками (шлюзовой камерой) и связаны электрическими кабелями с разъемами и трубопроводами с двухклапанными размыкателями. Оба модуля имеют герметизируемые отсеки, причем несколько отсеков верхнего модуля оборудованы в виде салонов пассажирского самолета (с креслами по количеству членов экипажа), а также имеют герметичные емкости для веществ различного агрегатного состояния (балластной морской воды, питьевой воды, сжатого воздуха, дизельного топлива). Движителями нижнего модуля являются два гребных винта, а верхнего модуля - один гребной винт и две пары водометных движителей горизонтальной и вертикальной тяги соответственно. Оба модуля имеют по две пары носовых и кормовых рулей, которые для верхнего модуля выполнены складывающимися, а также имеют рули, корректирующие дифферент. Вертикальный стабилизатор и рубка с постом управления и контроля является общими для обоих модулей и расположены на верхнем модуле. Вооружение включает установленный на нижнем модуле четырехтрубный торпедный аппарат и установленные на верхнем модуле спаренный торпедный аппарат и боевой лазер с размещением излучающейся части в выдвижном контейнере (в верхней части рубки). Недостатком прототипа является невозможность эвакуации экипажа при одновременном повреждении корпусов нижнего и верхнего модулей. Кроме того, прототипу, как и всем существующим конструкциям подлодок, присущ принципиально неустранимый недостаток, неизбежно приводящей к аварии, когда глубина погружения подлодки превышает предельную расчетную прочность корпуса транспортного модуля.
Задача изобретения состояла в создании такого подводного судна модульного типа, которое допускало увеличение глубины погружения, значительно превышающей прочность корпуса транспортного модуля по гидростатическому давлению, и одновременно обеспечивало безопасность экипажу при аварийной ситуации, эвакуации и последующим его надводном пребывании.
Для решения поставленной задачи с достижением указанного технического результата подводное судно включает по крайней мере два оснащенных движителями автономных модуля - нижнего транспортного с энергетической установкой, средствами для изменения степени плавучести, функциональными устройствами, герметичными емкостями с веществами различного агрегатного состояния и контейнерами с изделиями разного назначения, включая вооружение, и верхнего аварийно-спасательного в виде постоянного запаса плавучести плавсредства, которое расположено в верхней части корпуса нижнего модуля, имеет помещения для работы и отдыха экипажа, снабжено системами для обеспечения жизнедеятельности, контроля и управления, причем оба модуля соединены захватами с приводами, имеют средства отделения с пиродвигателями, сообщены шлюзовыми камерами и связаны электрокабелями с разъемами и трубопроводами с двухклапанными размыкателями, а движитель верхнего модуля выполнен в виде двух водометов горизонтальной тяги. Отличительной особенностью подводного судна является то, что его верхний модуль выполнен из нескольких рассредоточенных спасательных плавсредств, корпус нижнего модуля выполнен водопроницаемым и снабжен компенсаторами потери плавучести со сферическми элементами положительной плавучести, функциональные устройства размещены в герметичных емкостях и все емкости, включая контейнеры, выполнены в виде оболочек сферической и/или цилиндрической формы, а каждое спасательное плавсредство защищено корпусом нижнего модуля и сообщено своей по крайней мере одной шлюзовой камерой с общим герметичным проходом к несущим по крайней мере основные функциональные устройства емкостям.
Для повышения надежности аварийного отделения спасательного плавсредства от транспортного модуля каждое спасательное плавсредство размещено в поперечной или продольной негерметичной нише транспортного модуля, имеющей крышку с прерывистой контактной поверхностью, двигатель привода каждого захвата совмещен с пиродвигателем средства отделения, сам захват выполнен в виде частично открытого за счет торцевого отверстия и бокового окна цилиндра, оснащенного зафиксированным с помощью срезаемого винта поршнем с односторонним штоком, конец которого входит в фиксирующее углубление нижней полусферы корпуса спасательного плавсредства, а штоковая полость цилиндра сообщена с зарядной камерой пиродвигателя, причем захват и средство отделения установлены в герметичной камере выталкивания, которая совмещена со шлюзовой камерой и выполнена с коническим перекрытием,
контактирующим через уплотняющий элемент с нижней полусферой части корпуса спасательного плавсредства и имеющим проходное отверстие для возможности открытия нижнего люка, в своей нижней части камера выталкивания снабжена люком для перехода в общий проход, а фиксирующее углубление в полусферической части корпуса размещено в зоне между уплотняющим элементом и проходным отверстием в коническом перекрытии.
Для реализации в надводном положении транспортных возможностей при разряженных аккумуляторных батареях каждое спасательное плавсредство выполнено из двух или более шарнирно связанных между собой частей как приводных элементов спаренного волнового насоса и/или электрогенераторов, спаренный волновой насос входит в дополнительный водомет горизонтальной тяги, причем спаренный волновой насос расположен на кормовой части спасательного плавсредства, соединен с поворотным соплом соответствующими нагнетательными водоводами через вертикальный оснащенный маятниковым клапаном коллектор, а основной водомет горизонтальной тяги выполнен с двумя электромагнитными насосами, размещенными на кормовой части спасательного плавсредства.
Для повышения надежности и упрощения реализации камеры вытеснения спаренного волнового насоса дополнительного водомета спасательного плавсредства, состоящего из шарнирно связанных частей, выполнены сферообразной формы из упруго деформируемого материала, оснащены парами клапанов - всасывающим и нагнетательным, расположены симметрично относительно горизонтальной геометрической оси шарнирной связи частей спасательного плавсредства с возможностью взаимодействия с их опорными элементами в пределах рабочего угла поворота, максимальный размер которого обеспечен ограничителем поворота, выполненным в виде четырех пар упоров, установленных соответственно на частях спасательного плавсредства в зоне их шарнирной связи с возможностью совпадения их геометрических осей при контакте.
Для надежности крепления на транспортном модуле спасательного плавсредства с шарнирно связанными частями при плавании и при катапультировании, а также для обеспечения возможности включения и выключения волновых насосов после всплытия каждая смежная пара шарнирно соединенных частей снабжена двумя телескопическими стяжками, охватывающие и охватываемые элементы которых с помощью шарниров соответственно соединены со смежными подвижными частями спасательного плавсредства в верхней зоне, причем каждая телескопическая стяжка снабжена пружинным стопором двухпозиционного типа.
Для возможности восполнения запасов электроэнергии спасательного плавсредства с шарнирно соединенными частями в надводном положении и повышения эффективности преобразований энергии волн с малый амплитудой колебаний один из упоров каждой сопряженной пары, входящей в ограничитель поворота, снабжен электрогененратором, включающим индуктор, размещенный в герметичной кольцевой полости корпуса упора, возбудитель на постоянных магнитах, установленных на подпружиненном с помощью пружины сжатия плунжере, выполненного из диамагнитного материала и размещенного в соосном кольцевой полости осевой полости корпуса упора, и гидравлический механизм поворота плунжера, причем осевая полость и плунжер выполнены двухступенчатыми с образованием цилиндрической кинематической пары меньшими их ступенями, пружина сжатия размещена в меньшей ступени осевой полости корпуса упора с возможностью взаимодействия с торцом меньшей ступени плунжера через упорный подшипник скольжения в виде ступенчатой втулки, торец большей ступени плунжера выполнен сферическим, кольцевой внутренний торец больше ступени осевой полости корпуса упора снабжен торцевым уплотнением, а гидравлический механизм поворота выполнен в виде несквозного осевого канала в плунжере, открытого с торца его меньшей ступени, сообщенного с диаметральным каналом с перпендикулярными ему и противоположно направленными реактивными участками, размещенными в одной поперечной плоскости в меньшей ступени у торца большей ступени плунжера, и с радиальным каналом, выполненным в большей ступени и оснащенным предохранительным клапаном.
Для допонительного восполнения запасов электроэнергии спасательного плавсредства в надводном положении каждый из контактирующих с плунжером электрогенератора упоров ограничителя поворота снабжен пьезогнератором, размещенным в его герметичной полости с возможности упругого контакта с внутренней поверхностью своего торца.
Для увеличения полезных объемов без понижения несущей способности спасательного плавсредства средняя или промежуточная его часть выполнена из трех предпочтительно равного диаметра частей базовых сферических оболочек, которые сопряжены с помощью состоящих из соосно расположенных торового и цилиндрического герметичных элементов.
Для обеспечения безопасного перехода членов экипажа между шарнирно связанными частями спасательного плавсредства при одновременном упрощении выполнения за счет функционального совмещения каждая смежная пара его частей снабжена мостовым устройством переменной длины, включающим две выполненные из поперечных элементов решетки и рамочное ограждение, причем одна решетка жестко связана с охватывающими элементами телескопических стяжек, вторая решетка представляет собой блок, который своими концами соответственно связан шарнирами с охватываемыми элементами телескопических стяжек и цилиндрическими элементами с продольными направляющими, выполненными на охватывающих элементах телескопических стяжек, а ограждение выполнено утапливаемым и размещено на охватывающем элементе телескопических стяжек с возможностью вертикального перемещения и последующего стопорения в верхнем положении.
Для увеличения полезных объемов и обеспечении необходимых обводов каждого спасательного плавсредства передняя его часть снабжена обтекателем с размещенными в нем нескольких герметичных сферических емкостей.
Для сокращения времени выхода экипажа из спасательных плавсредств при надводном положении подводного судна крышки ниш транспортного модуля со спасательными плавсредствами оснащены люками, размещенными над выходными люками спасательных плавсредств.
Сущность изобретения поясняется чертежами, где:
на фиг. 1 изображено подводное судно, фронтальный вид с частичным разрезом (в подводном положении с условным расположением спасательных плавсредств во время их аварийного всплытия);
на фиг. 2 то же - вид А на фиг. 1 с частичным разрезом (транспортный модуль со снятой крышкой передней ниши и размещенным в ней спасательным плавсредством);
на фиг. 3 то же - разрез Б - Б на фиг. 1;
на фиг. 4 то же - выносной элемент I на фиг. 3 (компенсатор потери плавучести); на фиг. 5 то же - вид В на фиг. 1 (с движителем транспортного модуля в виде двух гребных винтов);
на фиг.6 то же - вид В на фиг.1 (при оснащении транспортного модуля движителем в виде двух водометов);
на фиг. 7…11 то же - модификации компоновки спасательного плавсредства (соответственно: с корпусом из жестко соединенных одной базовой сферы и двух полусфер; из двух шарнирно соединенных базовых сфер; из двух шарнирно связанных частей, носовая часть которых состоит из жестко соединенных двух или трех базовых сфер; из трех шарнирно соединенных базовых сфер);
на фиг. 12 то же - конструктивное выполнение спасательного плавсредства в виде моноблока из трех базовых сфер, жесткая связь которых осуществлена через торы и цилиндры;
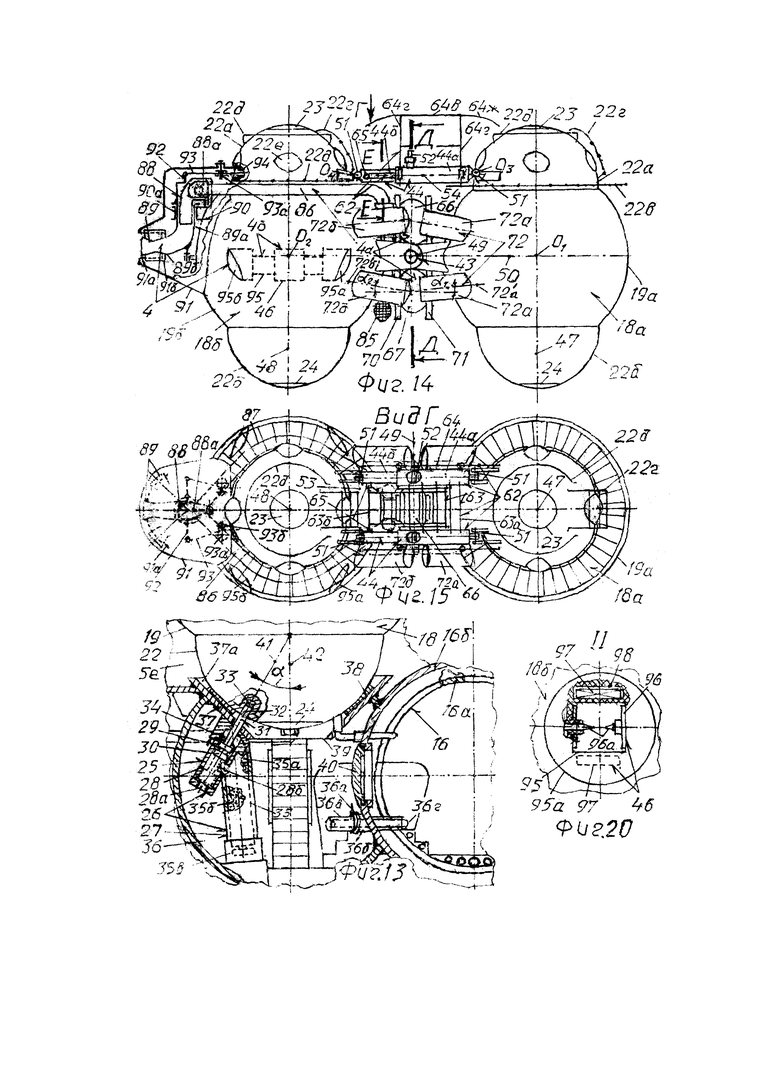
на фиг. 13 то же - один из захватов, обеспечивающий связь спасательного плавсредства с транспортным модулем с возможностью аварийного разъединения и имеющий привод, совмещенный с пироприводом выталкивающего средства (часть поперечного разреза камеры вытеснения, совмещенной со шлюзовой камерой перехода в продольный проход);
на фиг. 14 то же - фронтальный вид модификации спасательного плавсредства, выполненного из двух шарнирно соединенных частей в виде базовых сфер и оснащенных основным движителем в виде двух электрлмагнитных насосов и дополнительным движителем со спаренным волновым насосом с двумя сферообразными камерами вытеснения из упруго деформированного материала, фронтальный вид с частичным разрезом (с положением его элементов при выключенным спаренном волновом насосе);
на фиг. 15 то же - вид Г на фиг. 14;
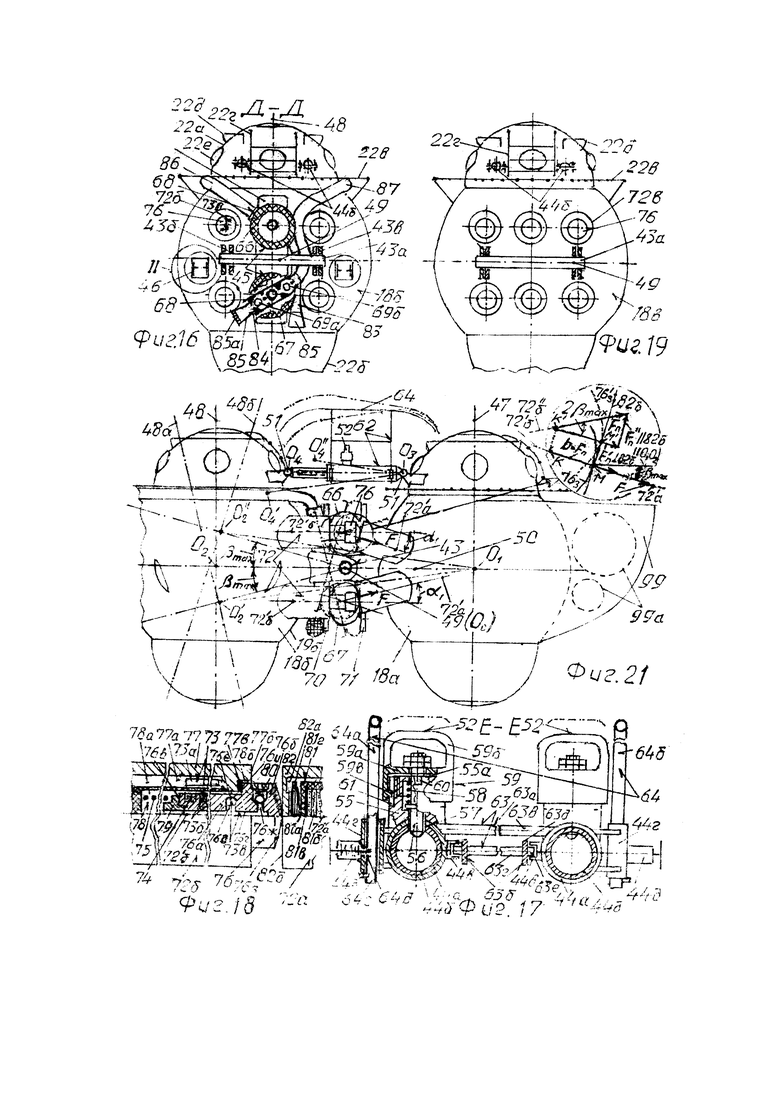
на фиг. 16 то же - разрез Д-Д на фиг. 14;
на фиг. 17 то же - разрез Е-Е на фиг. 14 (с дополнительным частичным разрезом двухпозиционного стопора спаренного волнового насоса);
на фиг. 18 то же - фрагмент контактной пары упоров ограничителя относительного поворота шарнирно связанных частей спасательного плавсредства, оснащенных электрогенератором и пьезогенератором соответственно, продольный разрез, совмещенный с видом (с условным совмещением геометрических осей упоров);
на фиг. 19 то же - разрез по шарнирной связи промежуточной части с носовой частью для двухшарнирной модификации спасательного плавсредства (промежуточная часть с шестью упорами, оснащенными электрогенераторами);
на фиг. 20 то же - выносной элемент II на фиг. 16 с частичным поперечным разрезом (электромагнитный насос водометного движителя);
на фиг. 21 то же - часть фронтального вида шарнирно связанных частей спасательного плавсредства, оснащенного мостовым устройством и имеющего обтекатель на носовой части корпуса (с условным относительным размещением частей корпусов в трех положениях - нейтральном и двух крайних и выносным элементом со схемой силового взаимодействия сферического торца плунжера электрогенератора с плоским торцом упора с пьезогенератором в общем случае).
Изобретение представляет собой подводное судно модульного типа (фиг. 1…6). Оно включает нижний транспортный модуль 1 и верхний аварийно-спасательный модуль 2 в виде, например нескольких (шести) рассредоточенных одинаковых спасательных плавсредств. Транспортный модуль 1 и спасательные плавсредства 2 являются автономными и оснащены одним или несколькими движителями 3 и 4 соответственно.
Транспортный модуль 1 является нижним и содержит основные функциональные устройства подлодки: корпус 5 (с рубкой 6, вертикальным стабилизатором 7, носовыми рулями 8, кормовыми рулями 9, корректирующими дифферент рулями 10), энергетическую установку 11, средства для изменения степени плавучести 12 (в виде цистерн - носовой, кормовой, боковых с компрессорными установками, основная цистерна не показана), центральную аккумуляторную батарею 13, герметичные емкости для веществ различного агрегатного состояния как питьевая и забортная вода, топливо, продукты питания (на чертеже не показано), герметичные контейнеры 14 с изделиями разного назначения 14а (например, вертикальные торпедные аппараты с крылатыми ракетами типа «Калибр»).
Корпус 5 нижнего модуля 1 выполнен водопроницаемым без разделения на отсеки (вместо переборок поперечные связи выполнены виде ферм 5 а). Обшивка 56 корпуса 5 сопряжена со шпангоутами 5в и стрингерами 5 г. Функциональные устройства, например, аккумуляторная батарея 13 (различная аппаратура, исполнительные механизмы рулей и другие на чертеже не показаны), а также базовые установки помещены в герметичные емкости (для устройства 13 емкость 15), которые выполнены в виде оболочек сферической и/или цилиндрической формы. Емкости 15а базовых установок, например, энергетической установки 11 (одной или нескольких, например, двух) сообщены с продольно ориентированным горизонтальным герметичным общим проходом 16, имеющим продольные цилиндрические участки 16а, состыкованные входными сферическими расширениями 16б. Внутри корпуса 5 (фиг. 3) пространство между емкостями разного назначения заполнено компенсаторами 17 потери плавучести (из-за водопроницаемости корпуса), которые выполнены в виде водопроницаемых емкостей 17а (фиг. 4), содержащие сферические элементы 17б положительной плавучести, например, выполненных из полимерного материала. Компенсаторы 17 зафиксированы на элементах корпуса 5 (на фермах 5а и между смежными шпангоутами 5в и стрингерами 5г) и на некоторых емкостях.
Рубка 6 включает цилиндрическую камеру 6а как пункт управления судном в надводном положении, шлюзовую камеру 6б как вертикальный проход, перископное устройство 6в и выдвижные антенны (на чертеже не показано). Перископное устройство 6в выполнено всплывающего типа, т.е. содержит телекамеру, кабель-трос, дистанционно управляемую лебедку и поплавок или аэростат (на чертеже не показано) и помещено в вертикальной цилиндрической емкости 6г (с верхним рабочим люком). Камера 6а соединена через шлюзовую камеру 6б (в виде двух сфер) с горизонтальным продольным проходом 16.
Движитель 3 транспортного модуля 1 может быть выполнен в виде двух противоположного вращения гребных винтов 3а (фиг. 5) или двух параллельных водометов 36 горизонтальной тяги (фиг. 6). Возможна установка и поворотного винтового движителя (на чертеже не показано).
Энергетическая установка 11 может быть выполнена, например, в виде одного из известных устройств: атомного (ядерного) реактора, низкоэнергетического (водородно-никелевого) ядерного реактора, электрохимического реактора (водородных топливных элементов), дизель-генератора.
Аварийно-спасательный модуль 2 является верхним, находится под защитой корпуса 5 нижнего транспортного модуля 1 и в зависимости от водоизмещения и назначения подводного судна выполнен из нескольких спасательных плавсредств 2а в виде моноблока или из нескольких шарнирно связанных частей, причем монтажная ориентация спасательных плавсредств 2а может быть продольной или поперечной. Возможны различные модификации выполнения спасательных плавсредств 2а, корпуса 18 которых выполнены в виде сферообразных оболочек, образованных сопряжением нескольких сфер по крайней мере двух разных диаметров, и являются цельными или состоят из нескольких шарнирно связанных частей. Некоторые из возможных их корпусных конфигураций Ki (i=0, 1…4) представлены на фиг. 7…11. Из спасательных плавсредств 2а в виде моноблока самой простой является конфигурация К0 из жестко связанной (жесткой связью С0 в виде сварного шва) одной базовой сферы 19 с двумя полусферами 22 меньшего диаметра (фиг. 7). Из спасательных плавсредств 2а с шарнирно связанными (связью C1) частями самой простой является конфигурация К1 из двух моноблочных с двумя полусферами 22 базовых сфер 19 - носовой 18а и кормовой 18б частей (фиг. 8). Одношарнирные модификации спасательных плавсредств 2а могут быть представлены конфигурациями К2 и К3, имеющие носовые части 18а, составленные из двух базовых и трех базовых сфер 19 соответственно, каждая из которых имеет верхние полусферы 22 (при одной нижней полусфере на любой из базовых), а кормовые части 18б одинаковые и составлены из одной базовой сферы 19 с двумя полусферами 22 (фиг. 9 и 10). Двухшарнирная модификация спасательного плавсредства 2а конфигурации К4 (фиг. 11) представлена тремя базовыми сферами 19 (соответственно являющимися носовой 18а, кормовой 18б и средней 18в частями) с двумя полусферами 22 каждая. Спасательное плавсредство 2а может быть, в частности, представлено в виде моноблока, выполненного как носовая часть 18а конфигурации К3 (фиг. 10). Возможно также выполнение спасательного плавсредства 2а (фиг. 12), корпус 18 которого (или корпуса их частей) состоит из трех базовых сферических оболочек 19 одного диаметра, причем их сопряжение (жесткая связь С2) осуществлено с помощью соосно расположенных оболочек наружной в виде тора 20 и охватываемой им в виде цилиндра 21. Кроме того, по крайней мере средняя базовая сферическая оболочка 19 может быть дополнена верхней и нижней полусферическими оболочками 22.
На фиг. 1, 2 и 3 спасательные плавсредства 2 представлены одной (из шести рассмотренных выше) шарнирной модификацией конфигурации К1 как наиболее функциональной. Каждый блок спасательного плавсредства 2 снабжены верхним 23 и нижним 24 люками, которые расположены соответственно на верхней и нижней полусферических оболочках 22. Внутреннее пространство спасательного плавсредства 2а разбито перегородками на помещения отдыха и рабочие помещения с пультами дистанционного управления и контроля, средствами жизнеобеспечения и другими функциональными средствами (на чертеже не показано). Спасательные плавсредства 2 размещены в имеющих крышки 5д поперечных нишах 5е верхней части корпуса 5 транспортного модуля 1, т.е. находится под защитой корпуса 5, причем контактная поверхность 5ж крышек 5д выполнена прерывистой (для уменьшения неуравновешенного противодавления на контурную часть крышки, сама крышка находяится из-за негерметичности корпуса под одинаковым внешнем и внутренним гидростатическим давлением). Часть веса крышек 5в может быть уменьшена за счет прикрепления к ним снизу компенсаторов 17. В каждой крышке 5в выполнены по два люка 23а, расположенных соосно верхним люками 23 соответствующего спасательного плавсредства 2, что обеспечивает возможность непосредственного выхода части экипажа в надводном положении подводного судна. Спасательные плавсредства 2 зафиксированы на транспортном модуле 1 захватами 25 и имеют средство для отделения 26 с общим пиродвигателем 27, т.е. они конструктивно совмещены.
Каждый захват 25 (фиг. 13) выполнен в виде частично открытого (за счет торцевого отверстия 28а и бокового окна 28б) цилиндра 28, оснащенного со срезаемым винтом 29 поршнем 30 с одностороннем штоком 31, конец 32 которого входит в фиксирующее углубление 33 нижней полусферы 22 корпуса 18 спасательного плавсредства 2. Штоковая полость 34 сообщена с зарядной камерой 35 пиродвигателя 27 газовым каналом 35а. Зарядная камера 35 оснащена зарядом 35б с электровзрывателем 35в. Захваты 25 и средство отделения 26 установлены в герметичной камере выталкивания 36, которая выполнена сферообразной с коническим перекрытием 37 для возможности образования посадочного углубления 37а, контактирующего через уплотняющий элемент 38 с нижней полусферой 22 корпуса 18 спасательного плавсредства 2 и имеющего отверстие 39 для возможности открытия нижнего люка 24. Камера выталкивания 36 в своей нижней части снабжена люком 40 для перехода в общий проход 16, т.е. камера выталкивания 36 является и шлюзовой (совмещена со шлюзовой камерой). Фиксирующее углубление 33 в нижней полусфере 22 корпуса 18 размещено в зоне между уплотняющим элементом 38 и отверстием 39 в коническом перекрытии 37. Фиксирующее углубление 33 выполнено цилиндрическим и расположено в поперечной вертикальной диаметральной плоскости (в плоскости чертежа) полусферы 22 корпуса 18 и его геометрическая ось 41 совпадает с геометрической осью штока 31, а угол α наклона к вертикали 42 находится в пределах 0<α≤30°, что исключает вертикальное перемещение и поворот полусферы 22 корпуса 18 в коническом посадочном углублении 37а.
Спасательные плавсредства 2 независимо от конфигурации их корпусов связаны с транспортным модулем 1 электрокабелями с разъемами и трубопроводами различного назначения с двухклапанными размыкателями (на чертеже не показано), причем разъемы и размыкатели размещены в нижних полусферах 22 корпуса 18. Кроме того, судно может быть оснащено пневматической почтой с двухстороннем направлением пересылок однолинейного типа (например, такой как известная система Neptune, обеспечивающая обслуживание до 25 станций, при грузоподъемности капсул 2…5 кг и протяженности линии до 1000 м). Станции 36а (фиг. 13), т.е. устройства приема и отправки капсул, помещены в герметичные емкости 36б с крышками 36в, а емкости 36б размещены в камерах выталкивания 36 корпусов 18, которые служат шлюзовой камерой, обеспечивающей переход через сферическое расширение 16б в цилиндрический участок 16а общего прохода 16 в отсутствии аварийной ситуации, а также помещены на камбузе и на складе мелкоштучной продукции, например, консервированных продуктов питания или медицинских препаратов (на чертеже не показано). Линия связи 36г станций 36а (в виде трубопровода для капсул) проложена в общем проходе 16 с автономным герметичным вводом в камеры выталкивания 36.
Шарнирная модификация спасательного плавсредства 2 конфигурации К1 (фиг. 14…16) является наиболее функционально информативна. Поэтому подробное рассмотрение только одной такой модификации достаточно для иллюстрации изобретения. Эта модификация включает корпус 18, выполненный из двух частей - носовой 18а и кормовой 18б, связанных с помощью шарнирной связи 43 и двумя стяжками 44. Кормовая часть 18б снабжена движителем 4 горизонтальной тяги (в виде одного водомета 4а со спаренным волновым насосом 45 и двух автономных водометов 46 с электромагнитными насосами 46). Части 18а и 18б корпуса 18 включают базовые сферы 19а и 19б, каждая из которых сопряжена соответственно с двумя полусферами - верхней 22а и нижней 22б, а вертикальные геометрические оси 47 и 48 сопрягаемых сфер соответственно сосны. Полусферы 22а и 22б имеют люки - верхний 23 и нижние 24 соответственно, которые открываются наружу. Шарнирная связь 43 включает цилиндрическую ось 43а, входящую в две вращательные кинематические пары 43б и 43в с частями 18а и 18б. Геометрическая ось 49 шарнирной связи 43 (общая с осью 43а) горизонтальна и перпендикулярна вертикальной плоскости, содержащей геометрические оси 47 и 48, а также и геометрическую ось 50 центров O1 и О2 базовых сфер 19а и 19б соответственно (фиг. 14…16). Каждая стяжка 44 выполнена в виде телескопического звена из охватывающего 44а и охватываемого 44б элементов, например кольцевого поперечного сечения, соединенного шарнирами 51 с частями 18а и 18б корпуса 18 в его верхней зоне, и оснащена стопором 52. Геометрические оси 53 шарниров 51 параллельны горизонтальной геометрической оси 49 шарнирной связи 43. Охватывающий элемент 44а каждой стяжки 44 может быть соединен с концевым элементом, входящий в шарнир 51, через винтовой натяжной узел (на чертеже не показано) для удобства монтажа. Геометрические оси 54 стяжек 44 ориентированы параллельно геометрической оси 50 центров O1 и О2 базовых сфер 19 а и 19б.
Стопор 52 служит для выключения (включения) спаренного волнового насоса 45. Поэтому он выполнен двухпозиционным пружинного типа (фиг. 17) и включает корпус 55, жестко связанный с охватывающим элементом 44а стяжки 44, и рабочий элемент 56, расположенный с возможностью входа (при выключении спаренного волнового насоса 45) в отверстие 57, выполненное в охватываемом элементе 44б стяжки 44 в положении, когда параллельны вертикальные геометрические оси 47 и 48 базовых сфер 19а и 19б соответственно, т.е. на половинном расстоянии от центров О3 и О4 шарниров 51 как от точек пересечения геометрических осей 53 и 54 соответственно шарнира 51 и стяжки 44. Рабочий элемент 56 стопора 52 выполнен цилиндрическим ступенчатым с возможностью взаимодействия с пружиной сжатия 58 и снабжен рукояткой 59. Рукоятка 59 выполнена в виде цилиндрического стакана 59а, охватывающего цилиндрический корпус 55, и оснащена захватным скобообразным элементом 59б у наружного торца и двумя радиальными выступами 59в, расположенных на своей внутренней поверхности в одной диаметральной плоскости с возможностью поочередного взаимодействия с радиальными пазами 60 на торце 55а корпуса 55 в верхнем положении (исключающем стопорение и тем самым обеспечивающим работу спаренного волнового насоса) или с продольными пазами 61 корпуса 55 после вывода из радиальных пазов 60 и повороте на 90° (в положении, обеспечивающим автоматическое выключение спаренного волнового насоса 45, наступающего в пределах двойного относительного хода элементов 44а и 44б стяжек 44).
Застопоренные стопором 52 элементы 44а и 44б обеспечивают стяжкам 44 жесткость, чем на период от нахождения спасательного плавсредства 2 на транспортном модуле 1 и до завершения его аварийного всплытия предотвращают относительный поворот частей 18а и 18б, а после выключения стопора 52 не препятствуют работе спаренного волнового насоса 45 Возможна также модификация стопора 52, имеющего привод с дистанционным управлением (на чертеже не показано).
Спасательное плавсредство 2 может быть оснащено мостовым устройством 62 (для многократных безопасных переходов членов экипажа из одной ее части 18а в другу 18б после аварийного всплытия). Мостовое устройство 62 (фиг. 14, 15 и 17) выполнено переменной длины и включает решетку 63 и рамочное ограждение 64. Решетка 63 выполнена в виде двух автономных частей 63а и 63б из поперечных трубчатых элементов 63в 63г соответственно. Часть 63а решетки 63 жестко связана непосредственно трубчатыми элементами 63в с охватывающими элементами 44а стяжек 44. Часть 63б решетки 63 выполнена в виде блока (его трубчатые элементы 63г жестко соединены с двумя боковыми параллельными пластинами 63д). Наружными концами блок 63б связан предпочтительно с помощью шарниров 65 с частями 18б корпуса 18, а его внутренние концы с помощью цилиндрических элементов 63е входят в продольные направляющие 44в, закрепленные на охватывающих элементах 44а стяжек 44.
Рамочное ограждение 64 (фиг. 14, 15 и 17) выполнено из двух боковых одинаковых трубчатых частей 64а и 64б П-образной формы, одна сторона 64в каждой из которых параллельна геометрической оси 54 стяжек 44, а две остальные стороны 64г перпендикулярны стороне 64в и установлены своими концами на охватывающих элементах 44а с возможностью перемещения в трубчатых направляющих 44г со стопорением в верхнем (рабочем) положении с помощью пружинного стопора 44д и отверстия 64д, выполненного в конце каждой стороны 64г частей 64а и 64б (стопорение в нижнем положении не является обязательным). Верхние участки частей 64а и 64б ограждения 64 могут быть снабжены криволинейными консольными элементами 64ж.
Части 18а и 18б корпуса 18 могут быть снабжены кольцевыми площадками 22в (в виде радиальных решеток), размещенными вокруг верхних полусфер 22а. На последних установлены трапы 22г и дуговые поручни 22д и выполнены четыре иллюминаторы 22е.
Спаренный волновой насос 45 (фиг. 16) имеет две работающие в противофазе камеры вытеснения 66 и 67, выполненные сферообразной формы из упруго деформируемого материала, расположенные симметрично относительно поперечной (горизонтальной при штиле) геометрической оси 49 шарнирной связи 43 частей 18а и 18б и оснащенные клапанными блоками 68, каждый из которых имеет пары клапанов шарового типа - всасывающего 69а и нагнетательного 69б. Камеры вытеснения 66 и 67 закреплены на кронштейнах 70 кормовой части 18б с возможностью взаимодействия с кронштейнами 71 носовой части 18а в пределах рабочего угла поворота β (фиг. 21), максимальный размер βmax которого обеспечивается ограничителем поворота 72, выполненным в виде четырех пар (двух верхних и двух нижних) контактирующих упоров 72а и 72б, установленных соответственно на носовой 18а и кормовой 18б частях в зоне их шарнирной связи 43. При этом каждая пара контактирующих упоров 72а и 72б установлены с ориентацией, обеспечивающих возможность совпадения их продольных геометрических осей 72а1 и 72б1 при достижении угла поворота (3, равному максимальному (β=βmax), т.е. когда сумма углов наклона α1 и α2 геометрических осей 72а1 и 72б1 к горизонтали (линии центров О1О2 в нейтральном положении частей 18а 18б) соответственно вперед и назад равна максимальному углу поворота (α1+α2=βmax). В частности, возможно симметричное расположение осей 72а1 и 72б1 при α1=α2=0,5 βmax (фиг. 14) или асимметричное при α1=βmax и α2=0 (фиг. 21). Контактирующие поверхности упоров могут представлять пару сфера- плоскость.
Упор 72б (фиг. 18) ограничителя поворота 72 может быть снабжен электрогенератором 73, включающим индуктор 73а, возбудитель 73б на постоянных магнитах 74, например, в виде плоских колец, размещенных на подпружиненном с помощью винтовой цилиндрической пружины сжатия 75 плунжере 76 из диамагнитного материала, и гидравлический механизм поворота 73в плунжера 76. Индуктор 73а размещен в герметичной кольцевой полости 77а корпуса 77 упора 72б, а плунжер 76 - в открытой с торца 77б корпуса 77 цилиндрической осевой полости 78, сосной кольцевой полости 77а. Плунжер 76 и осевая полость 78 выполнены по крайней мере двухступенчатыми с образованием цилиндрической кинематической пары меньшими их ступенями 76а и 78а соответственно. Пружина сжатия 75 размещена в меньшей ступени 78а осевой полости 78 с возможностью взаимодействия с торцом 76в меньшей ступени 76а плунжера 76 через упорный подшипник скольжения 79, выполненный, например, в виде центрирующей ступенчатой втулки. Гидравлический механизма поворота 73в включает выполненный открытым с торца 76в меньшей ступени 76а плунжера 76 несквозной осевой канал 76г и сообщенные с ним два канала - диаметральный 76д с концевыми перпендикулярными взаимно противоположными реактивными участками 76е, расположенными в одной поперечной плоскости меньшей ступени 76а у большей ступени 76б, и радиальный канал 76ж, выполненный в большей ступени 76б и оснащенный обратным клапаном 80. Реактивные участки 76е канала 76д по очереди выполняют функцию всасывания и выброса забортной воды (при функционировании после аварийного всплытия). Большая наружная ступень 76б плунжера 76 имеет нажимной сферический торец 76з, а внутренний кольцевой торец 76и упирается (в крайнем внутренним положении плунжера 76) в кольцевое плоское уплотнение 77в, размещенное в ступени 78б осевой полости 78 корпуса 77. Уплотнение 77в необходимо только для герметизации осевой полости 78 на период подводного плавания до аварийного всплытия спасательного плавсредства 2, чтобы исключить разрушение внутренней стенки герметичной кольцевой полости 77а при значительной глубине погружения. Для обеспечения предварительного прижатия кольцевого торца 76и плунжера 76 к уплотнению 77в при зафиксированном с помощью стопора стяжек 44 частей 18а и 18б спасательного плавсредства 2, когда плунжер 76 занимает среднее положение, может быть использован съемный нажимной элемент, например в виде пружины сжатия (на чертеж не показано), располагаемый между сферическим торцом 76з плунжера 76 и упором 72б (после аварийного всплытия нажимной элемент удаляют).
Упоры 72а, контактирующие со снабженными электрогенераторами 73 упорами 72б, могут быть оснащены пьезогенераторами 81 (фиг. 18), которые размещены в герметичных полостях 82а их корпусов 82. Каждый пьезогенератор 81 выполнен в виде охватываемого диэлектрической оболочкой 81а набора пьезопластин 81б с концевыми электропроводными обкладками 81в, электрически связанными через резисторы и выпрямитель с ионистором или батареи из них (на чертеже не показано), Пьезогенератор 81 размещен внутри полости 82а с возможностью упругого контакта изнутри с наружным рабочем торцом 82б корпуса 82 упора 72а, например с помощью тарельчатой пружины 81г, Рабочие торцы 82б упоров 72а имеют плоскую форму и контактируют со сферическими торцами 76з плунжеров 76.
Для двухшарнирной модификации спасательного плавсредства 2, т.е. для конфигурации К4, у шарнирной связи носовой части 18а с промежуточной частью 18в находятся только упоры (без волнового насоса 45а): для части 18в это упоры 72в (фиг. 19). Упоры 72а и 72в снабены пьезогенераторами и электорогенераторами соответственно, причем количество контактирующих пар упоров может быть увеличено, например до шести. Промежуточная часть 18в движителями не оснащается.
Камеры вытеснения 66 и 67 волнового насоса 45а (фиг. 16) через клапанные блоки 68 соответственно соединены всасывающими волноводами 83 и 84 с водозаборниками 85 торцевого входа, оснащенного сеткой 85а, а нагнетательными водоводами 86 и 87 через вертикальный (по выходу) коллектор 88, оснащенный маятниковым клапаном 88а, соединены с поворотным соплом 89 (фиг. 14 и 15), установленным на кронштейне 90 базовой сферы 19б кормовой части 18б. Для этого поворотное сопло 89 выполнено в виде трубчатого колена, вертикальный участок 89а которого охватывает вертикальный коллектор 88 нагнетательных трубопроводов 86 и 87, образует вращательную пару 90а с кронштейном 90, размещено своей горизонтальной частью 89б в горизонтальном пазу 91а защитного колпака 91, связано с поворотным элементом 92. Поворотный элемент 92 выполнен в виде двухстороннего рычага, концы которого гибкой связью 93 (тросом) через отклоняющие ролики 93 а (совместно с прижимными роликами 93б) и тендеры связаны со штурвалом (на чертеже не показано). Для исключения нарушения герметизации корпуса такая связь может быть осуществлена после аварийного всплытия через ранее закрытые пробками с уплотнения (на чертеже не показано) ступенчатые каналы 94 (до всплытия концы троса 93 в виде цилиндрических наконечников зафиксированы у каналов 94 снаружи, а после всплытия наконечники троса 93 вводят в каналы 94 и присоединяют через разрезные втулки к тендерам). Горизонтальный паз 91а защитного колпака 91 может быть прикрыт подвижным цилиндрическим щитком 91б, закрепленном на горизонтальном участке 896 сопла 89.
В боковых частях базовой сферы 19б кормовой части 186 установлены два водомета 46 с электромагнитными насосами 46 (канального исполнения индукционного типа), имеющими продольно ориентированные и симметрично расположенные водоводы 95 (фиг. 14 и 15). В качестве электромагнитного насоса 46 (фиг. 20) может быть использована одна из известных его модификаций, например, модификация, включающая два пластинчатых электрода 96 с проходящими через них и изолированных от них дополнительными заостренными электродами 96а взаимно противоположной полярности, и двумя противоположно расположенными катушками индуктивности 97. Катушки индуктивности 97 размещены в герметичной камере 98 с возможностью охвата водовода 95 прямоугольного сечения, а пластинчатые электроды 96 с заостренными электродами 96а размещены внутри водовода 95 на противоположных его стенках, перпендикулярных стенкам, которые примыкают к катушкам индуктивности 97. Входное 95а и выходное 95б отверстия водовода 95 выполнены цилиндрическими и закрыты цилиндрическими пробками с уплотнениями (на чертеже не показано). Эти пробки удаляются только после аварийного всплытия спасательного плавсредства 2 и могут быть заменены цилиндрическими вставками с диффузорными и конффузорными каналами квадратного сечения (на чертеже не показано).
Для спасательного плавсредства 2 конфигурации К0, т.е. моноблочной его модификации, установлены два водомета с электромагнитными насосами и продольно ориентированными водоводами. Поворот этого спасательного плавседства осуществляется за счет изменения производительности одного из насосов или с помощью рулевого устройства, имеющего привод, аналогичный поворотному приводу сопла 89 (на чертеже не показано).
Носовая часть 18а корпуса 18 спасательного плавсредства 2 любой конфигурации Кi может быть оснащена носовым обтекателем 99 (фиг. 21) с размещенными в нем несколькими герметичными емкостями 99а одинакового или разного диаметра.
Спасательные плавсредства 2 конфигураций К0, К2, и К3 могут иметь вооружение.
Работа систем подводного судна состоит в следующем.
При штатных условиях подводного плавания весь экипаж в виде малочисленных специализированных групп находится в локально распределенных по подводному судну спасательных плавсредствах 2, неся вахту (по управлению функциональными агрегатами своего участка и контролю их работы) и отдыхая после вахты. При необходимости возможно проведение осмотра и устранение незначительных неисправностей путем посещения членами экипажа емкостей с функциональными агрегатами через общий проход 16. Указанные локальный контроль и управление продублированы и осуществляются через центральный пост. Кроме информационного обмена, возможен и материальный дистанционный обмен по вакуумным трубопроводам как между герметичными емкостями со складируемыми в герметичной таре малой массы материалами и спасательными плавсредствами 2, так и между последними. В зависимости от назначения подводного судна выполняются также работы по маневрированию и последующему использованию герметичных контейнеров 14 (в том числе и запуску крылатых ракет 14а с подводного положения, например при глубине погружения 30…100 м).
При аварийной ситуации с центрального поста, размещенного в одном из спасательных плавсредств 2, подается команда на катапультирование всех спасательных плавсредств 2. Она может быть осуществлена централизованно в случае подтверждения информации о закрытии каждой пары нижних люков 24 для всех плавсредства 2 и крышек 35в герметичных емкостей 35б станций 35а пневматической почты при фиксированном замедлении срабатывания электровзрывателей пиродвигателей 27 или децентрализовано (с пультов управления каждого спасательного плавсредства 2). При этом (фиг. 13) после одновременного срабатывания электроврывателей каждого из двух пиродвигателей его пороховые газы из зарядной камеры 35 входят через канал 35а в штоковую полость 34 и перемещают поршень 30 вниз, срезая стопорящий винт 29, при этом конец 32 штока 31 выходит из стопорного канала, открывая доступ пороховым газам в выталкивающую камеры 35 (через окно 28б и открытую штоковую полость 34). Поле заполнения пороховыми газами выталкивающих камер 35 и достижения их рабочего давления происходит выталкивание полусфер 22 из посадочных конических гнезд 37а, попадание пороховых газов в ниши 5е, сбрасывания крышек 5д от их действия совместно с нажимом спасательного плавсредства 2, всплывающего под воздействием архимедовой силы (фиг. 1).
После всплытия спасательного плавсредства 2 извлекают пробки с уплотнениями из каналов 94, через которые вводят наконечники троса 93 и с помощью разрезных втулок присоединяют к тендерам, связанных тросом со штурвалом, а также извлекают пробки из входных 95а и выходных 95б отверстий водоводов 95 водометов 46, заменяя вставками с конффузорными и диффузорными каналами. Извлекают прижимные элементы со сферических концов 76з плунжеров 76 электрогенераторов 73. Затем включают в работу спаренный волной насос 45 водомета 4а с помощью винтовых стопоров 52 стяжек 44, выводя из зацепления их рабочие элементы 56 подвижных с фиксирующими отверстиями 57 охватываемых элементов 44б стяжек 44 (фиг. 17). В результате чего в надводном положении всплывшее спасательное плавсредство 2 при наличии волн способно перемещаться своим ходом с помощью водомета 4а со спаренным волновым насосом 45. Необходимое направление движения спасательного плавсредства 2 или приближение к такому направлению (курсу), идя «галсами» (относительно фронта волны), осуществляют с помощью поворотного сопла 89, При этом спаренной волновой насос 45 работает за счет относительного поворота частей 18а и 18б под воздействием волн и поочередного нажатия кронштейнов (как опорных элементов) 70 и 71 на одну из двух его камер вытеснения 66 или 67, чем обеспечивается поочередное их заполнение забортной водой, поступающей через заборники 85 по всасывающим водоводам 83 и 84 (фиг. 14…16), периодическое перемещение ее по напорным водоводам 86 или 87 (при поочередном автоматически срабатывании от напора маятникового клапана 88а) к поворотному соплу 89 и выбросу через него, обеспечивая реактивную тягу.
Электрогенераторы 73 работают при относительном повороте частей 18а и 18б корпуса 18 спасательного плавсредства 2, и эффективность их работы возрастает с увеличен угла поворота β (фиг. 21), т.е. от размера дугового перемещения центра О2 сферы 196 части 18б относительно центра поворота О0 (точки на геометрической оси 49 шарнирной связи 43). При этом сферические торцы 76з их плунжеров 76, несущие постоянные магниты 74, находятся под действием пружин 75 в постоянном скользящем контакте с плоскими торцами 82б упоров 72а, а индуктор 73а перемещается относительно магнитов 74 прямолинейно и с поворотом от реактивного действия двух противоположных струй воды, выбрасываемой концевыми участками 76е канала 76д гидравлического механизма поворота 73в (в основном при движении плунжера 76 в направлении противодействия пружины 75 и частично при обратном движении), совершая винтовое с переменным шагом колебательное движение и индуцируя за счет движения постоянных магнитов 74 в индукторе 73а переменный ток, который после преобразования заряжает аккумуляторную батарею.
Пьезогенераторы 81, размещенные в упорах 72а, работают при наличии сжимающей нагрузки на торцевую поверхность 82б упоров 72а (фиг. 21). При углах относительного поворота частей 18а и 18б β<2βmax (с отсчетом от крайнего положения условно неподвижной геометрической оси 72а1 упора 72а) сжимающим усилием для каждого пьезогенератора 81 является только усилие Fп цилиндрической пружины сжатия 75 плунжера 76 электрогенератора 73, причем размер этого усилия увеличивается с коэффициентом пропорциональности b при сближении торцов упоров 72а и 72б, т.е. при уменьшении угла β). Вектор сжимающего усилия Fп проходит через центр К1 кривизны сферического торца 76з1 плунжера 76, прижатого к плоскому торцу 82б упора 72а в точке М1 скользящего контакта. Составляющая Fп1 этого вектора перпендикулярна торцу 82б (поэтому параллельна геометрической оси 72а1) и изменяется по размеру от минимального Fп⋅cos 2β до максимального, близкому к b⋅Fп⋅cos 0=b⋅Fп. Когда угол колебаний достигает размера β=2βmax, центр кривизны К сферического торца 76з плунжера 76 и точка его контакта М с плоским торцом 82б упора 72а располагаются на геометрической оси 72а1 упора 72а, при этом большая ступень 76б плунжера 76 (фиг. 18) входит в большую ступень 78б осевой полости 78 корпуса 77 упора 72б, действие пружины 15 поглощается тем, что упор 72а непосредственно воздействует на большую ступень 76б, в результате чего возникает сжимающее усилие F, размер которого может быть на порядок больше размера усилия Fп. В этом случае пьзогенератор работает устойчиво. Усилие сжатия F воздействует через пружину 81 г на пьезопластины 81б каждого из пьетзогенераторов 81, генерируя высокое напряжение, что после его преобразования обеспечивает накопление электрических зарядов в ионисторах.
При штиле движение спасательное плавсредства 2 обеспечивается двумя водометами 46 с электромагнитными насосами 46 (фиг. 20), создающие в водоводе 95 движение морской воды с повышенной (за счет электрического пробоя с помощью электродов 96а) электропроводностью под действием силы Лоренца увеличенного размера, возникающей от взаимодействия ортогональных электрических и магнитных полей, соответственно создаваемых пластинчатыми электродами 96 и катушками индуктивности 97. Электромагнитные насосы 46 получают электроэнергию от аккумуляторных батарей, зарядка которых осуществляется от электогенераторов 73 при возвратно-поступательном винтовом перемещении плунжеров 76, когда работает спаренный волновой насос 45.
При необходимости спаренный волновой насос 45 может быть отключен с помощью пружинных стопоров 52 путем выведение из зацепления выступов 59в рукояток 59 из радиальных пазов 60, поднимая и поворачивая рукоятку 59 на 90° (до совпадения с продольными пазами 61 и последующим перемещением в нижнее положение под действием пружины 58, чем обеспечивается автоматически стопорение охватываемых элементов 44б стяжек 44 подвижных частей 18а и 18б спасательного плавсредства.2 (опускание под действием пружины 58 рабочих элементов 56 до контакта с поверхностью охватываемых элементов 44б, перемещение по ней с последующим попаданием в фиксирующие радиальные отверстия 57).
Переход членов локального экипажа из одной части 18а спасательного плавсредства 2 в другую 18б осуществляется через мостовое устройство 62, решетка 63 которого из трубчатых связей 63а и 63б при наличии волн принимает различное наклонное положение геометрических осей О3О4 (фиг. 21), выполняя частично функцию ступенек, когда крутизна наклона решетки 63 возрастает при наклоне геометрической оси 47, т.е. не только в относительном, но и в абсолютном перемещении шарнирно связанных частей 18а и 18б.
Изобретение позволяет повысить безопасность экипажу подводного судна в аварийной ситуации, дает новый принцип проектирования крупнотоннажных подводных судов, обеспечивающий увеличение глубины их безопасного погружения в несколько раз, что создает дополнительные возможности в решении задач подводного судостроения.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАДВОДНО-ПОДВОДНОЕ ТРАНСПОРТНОЕ СУДНО | 1999 |
|
RU2149120C1 |
| Устройство для доставки углеводородов в арктическом бассейне | 2018 |
|
RU2700518C1 |
| АКВААЭРОКОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2626418C2 |
| МНОГОКОРПУСНЫЙ ГЛУБОКОВОДНЫЙ ОБИТАЕМЫЙ АППАРАТ ( ВАРИАНТЫ) | 2014 |
|
RU2553599C1 |
| Погружное судно для подъема затонувших объектов | 1990 |
|
SU1807958A3 |
| Плавучая платформа, совмещенная с малыми судами на сжатом пневмопотоке | 2021 |
|
RU2835223C2 |
| АТОМНАЯ ПОДВОДНАЯ ЛОДКА | 2012 |
|
RU2494004C1 |
| АТОМНАЯ ПОДВОДНАЯ ЛОДКА И ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ МОРСКОГО ИСПОЛНЕНИЯ | 2012 |
|
RU2488517C1 |
| Глубоководное спасательное судно для подъема затонувших объектов | 1990 |
|
SU1796544A1 |
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2457148C1 |

Изобретение относится к судостроению, а именно к подводным суднам с аварийно-спасательными средствами для всего экипажа. Подводное судно включает в себя по крайней мере два оснащенных движителями автономных модуля - нижний транспортный с энергетической установкой, средствами для изменения степени плавучести, функциональными устройствами, герметичными емкостями с веществами различного агрегатного состояния и контейнерами с изделиями разного назначения, включая вооружение; и верхний аварийно-спасательный в виде постоянного запаса плавучести плавсредства, который расположен в верхней части корпуса нижнего модуля, имеет помещения для работы и отдыха экипажа и снабжен системами для обеспечения жизнедеятельности, контроля и управления. Оба модуля соединены захватами с приводами и имеют средства отделения с пиродвигателями, сообщены шлюзовыми камерами и связаны электрокабелями с разъемами и трубопроводами с двухклапанными размыкателями. Движитель верхнего модуля выполнен в виде двух водометов горизонтальной тяги. Верхний модуль выполнен из нескольких рассредоточенных спасательных плавсредств. Корпус нижнего модуля выполнен водопроницаемым и снабжен компенсаторами потери плавучести со сферическими элементами положительной плавучести. Функциональные устройства размещены в герметичных емкостях, все емкости, включая контейнеры, выполнены в виде оболочек сферической и/или цилиндрической формы, а каждое спасательное плавсредство защищено корпусом нижнего модуля и сообщено своей по крайней мере одной шлюзовой камерой с общим герметичным проходом к несущим по крайней мере основные функциональные устройства герметичным емкостям. Достигается увеличение глубины погружения, значительно превышающей допустимую по прочности корпуса и одновременно обеспечивающей безопасность экипажу при аварии и после нее. 11 з.п. ф-лы, 21 ил.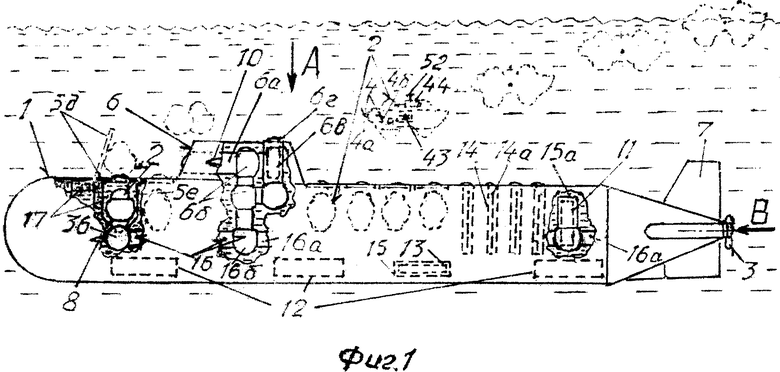
1. Подводное судно, включающее по крайней мере два оснащенных движителями автономных модуля - нижний транспортный с энергетической установкой, средствами для изменения степени плавучести, функциональными устройствами, герметичными емкостями с веществами различного агрегатного состояния и контейнерами с изделиями разного назначения, включая вооружение, и верхний аварийно-спасательный в виде постоянного запаса плавучести плавсредства, который расположен в верхней части корпуса нижнего модуля, имеет помещения для работы и отдыха экипажа, снабжен системами для обеспечения жизнедеятельности, контроля и управления, причем оба модуля соединены захватами с приводами, имеют средства отделения с пиродвигателями, сообщены шлюзовыми камерами и связаны электрокабелями с разъемами и трубопроводами с двухклапанными размыкателями, а движитель верхнего модуля выполнен в виде двух водометов горизонтальной тяги, отличающееся тем, что его верхний модуль выполнен из нескольких рассредоточенных спасательных плавсредств, корпус нижнего модуля выполнен водопроницаемым и снабжен компенсаторами потери плавучести со сферическими элементами положительной плавучести, функциональные устройства размещены в герметичных емкостях, все емкости, включая контейнеры, выполнены в виде оболочек сферической и/или цилиндрической формы, а каждое спасательное плавсредство защищено корпусом нижнего модуля и сообщено своей по крайней мере одной шлюзовой камерой с общим герметичным проходом к несущим по крайней мере основные функциональные устройства герметичным емкостям.
2. Подводное судно по п.1, отличающееся тем, что каждое спасательное плавсредство размещено в поперечной или продольной негерметичной нише корпуса транспортного модуля, имеющей крышку с прерывной контактной поверхностью, двигатель каждого связывающего транспортный модуль со спасательным плавсредством захвата совмещен с пиродвигателем средства отделения, сам захват выполнен в виде частично открытого за счет торцевого отверстия и бокового окна цилиндра, оснащенного зафиксированным с помощью срезаемого винта поршнем с односторонним штоком, конец которого входит в фиксирующее углубление нижней полусферы корпуса спасательного плавсредства, а штоковая полость цилиндра сообщена с зарядной камерой пиродвигателя, причем захват и средство отделения установлены в герметичной камере вытеснения, которая совмещена со шлюзовой камерой и выполнена с коническим перекрытием, контактирующим через уплотняющий элемент с нижней полусферой корпуса спасательного плавсредства и имеющим отверстие для возможности открытия нижнего люка, в своей нижней части камера вытеснения снабжена люком для перехода в общий проход, а фиксирующее углубление в нижней полусфере корпуса размещено в зоне между уплотняющим элементом и отверстием в коническом перекрытии.
3. Подводное судно по п.2, отличающееся тем, что каждое спасательное плавсредство выполнено из двух или более шарнирно связанных между собой частей как приводных элементов спаренного волнового насоса и/или электрогенераторов, спаренный волновой насос входит в дополнительный водомет горизонтальной тяги, причем спаренный волновой насос расположен на кормовой части спасательного плавсредства, соединен с поворотным соплом соответствующими нагнетательными водоводами через оснащенным маятниковым клапаном вертикальный коллектор, а основной водомет горизонтальной тяги выполнен с двумя электромагнитными насосами, симметрично размещенными на кормовой части спасательного плавсредства.
4. Подводное судно по п.3, отличающееся тем, что камеры вытеснения спаренного волнового насоса дополнительного водомета спасательного плавсредства выполнены сферообразной формы из упругодеформируемого материала, оснащены парами клапанов - всасывающего и нагнетательного, расположены симметрично относительно горизонтальной геометрической оси шарнирной связи частей спасательного плавсредства с возможностью взаимодействия с их опорными элементами в пределах рабочего угла поворота, максимальный размер которого обеспечен ограничителем поворота, выполненным в виде четырех пар контактирующих упоров, установленных соответственно на частях спасательного плавсредства в зоне их шарнирной связи с возможностью совпадения их геометрических осей при контакте.
5. Подводное судно по п.3, отличающееся тем, что каждая смежная пара шарнирно связанных частей спасательного плавследства снабжена двумя телескопическими стяжками, охватывающий и охватываемый элементы которых с помощью шарниров соответственно соединены со смежными частями спасательного плавсредства в верхней зоне, причем каждая телескопическая стяжка снабжена пружинным стопором двухпозиционного типа.
6. Подводное судно по п.3, отличающееся тем, что один из упоров каждой сопряженной пары, входящей в ограничитель поворота шарнирно связанных частей спасательного плавсредства, снабжен электрогенератором, включающим индуктор, размещенный в герметичной кольцевой полости корпуса упора, возбудитель на постоянных магнитах, установленных на подпружиненном с помощью пружины сжатия плунжере, выполненном из диамагнитного материала и размещенном в соосной кольцевой полости осевой цилиндрической полости корпуса упора, и гидравлический механизм поворота плунжера, причем кольцевая полость и плунжер выполнены двухступенчатыми с возможностью образования цилиндрической кинематической пары меньшими их ступенями, пружина сжатия размещена в меньшей ступени осевой полости корпуса упора с возможностью взаимодействия с торцом меньшей ступени плунжера через упорный подшипник скольжения в виде ступенчатой втулки, торец большей степени плунжера выполнен сферическим, кольцевой внутренний торец большей ступени осевой полости корпуса снабжен торцевым уплотнением, а гидравлический механизм поворота выполнен в виде несквозного осевого канала в плунжере, открытого с торца его меньшей ступени, сообщенного с диаметральным каналом с перпендикулярными ему и противоположно направленными открытыми реактивными участками, размещенными в одной поперечной плоскости в меньшей ступени у торца большей ступени плунжера, и с радиальным каналом, выполненным в большей ступени плунжера и оснащенным предохранительном клапаном.
7. Подводное судно по п.4, отличающееся тем, что каждый из контактирующих с плунжером возбудителя электрогенератора упоров выполнен с плоским торцом и снабжен пьезогенератором, размещенным в его герметичной полости с возможностью упругого контакта изнутри с торцом корпуса упора.
8. Подводное судно по п.3, отличающееся тем, что спасательное плавсредство с двухшарнирным соединением частей снабжено по крайней мере шестью парами контактирующих упоров, попарно оснащенных электрогенераторами и пьезогенераторами и соответственно размещенных на промежуточной и носовой своих частях.
9. Подводное судно по п.2 или 3, отличающееся тем, что спасательное плавсредство в виде моноблока или его часть, шарнирно связанная с кормовой частью, выполнена из трех предпочтительно равного диаметра базовых сферических оболочек, которые сопряжены с помощью состоящих из соосно расположенных цилиндрического и торового герметичных элементов.
10. Подводное судно по п.3, отличающееся тем, что каждая смежная пара шарнирно связанных частей спасательного плавсредства снабжена мостовым устройством переменной длины, включающим две выполненные из поперечных элементов решетки и рамочное ограждение, причем одна решетка жестко связана с охватывающими элементами телескопических стяжек, вторая решетка представляет собой блок, который своими концами соответственно связан шарнирами с охватываемыми элементами телескопических стяжек и цилиндрическими элементами с продольными направляющими, выполненными на охватывающих элементах телескопических стяжек, а ограждение выполнено утапливаемым и размещено на охватывающем элементе телескопических стяжек с возможностью вертикального перемещения и последующего стопорения в верхнем положении.
11. Подводное судно по п.3, отличающееся тем, что носовая часть каждого спасательного плавсредства снабжена обтекателем с размещенными в нем несколькими герметичными сферическими емкостями одного или разных диаметров.
12. Подводное судно по п.2, отличающееся тем, что крышки ниш со спасательными плавсредствами снабжены люками, расположенными над выходными люками спасательных плавсредств.
| АВАРИЙНО-СПАСАТЕЛЬНАЯ СИСТЕМА ДЛЯ СПАСЕНИЯ ЭКИПАЖА ПОДВОДНОЙ ЛОДКИ ПРИ АВАРИИ В ПОДВОДНОМ ПОЛОЖЕНИИ | 2001 |
|
RU2229419C2 |
| US 3678872 A1, 25.07.1972 | |||
| ПОДВОДНОЕ СУДНО | 2001 |
|
RU2202494C2 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ АВТОМАТИЗИРОВАННОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2007 |
|
RU2434766C2 |

