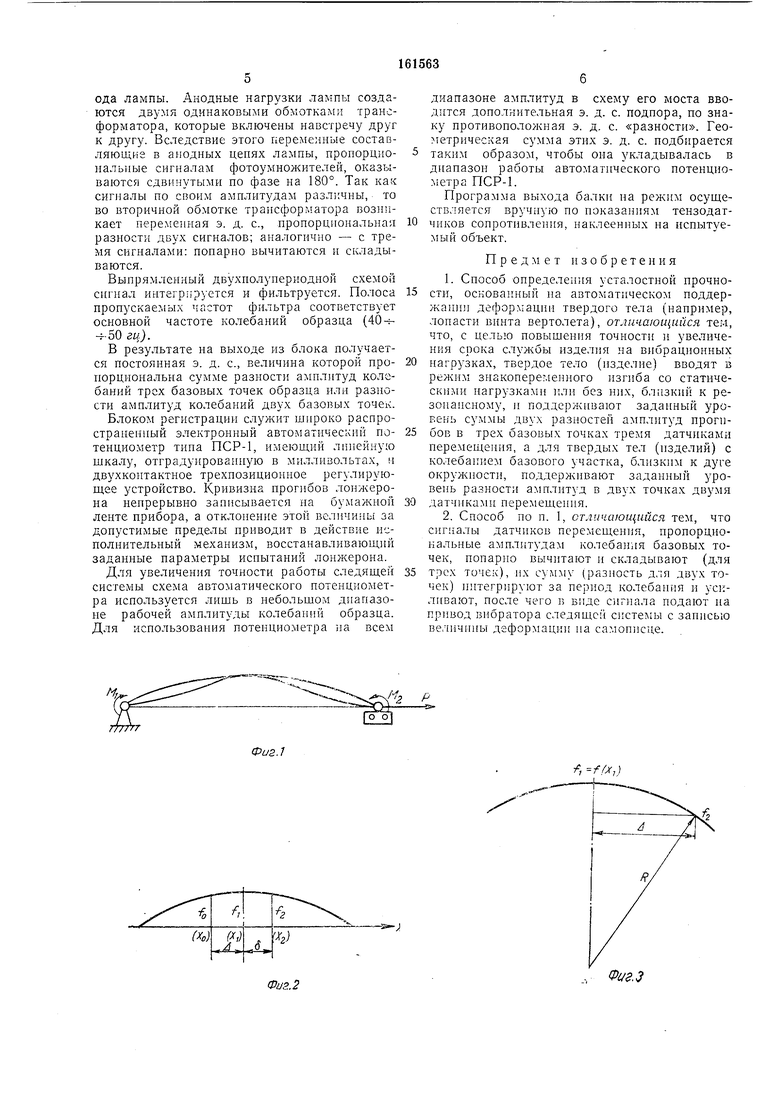
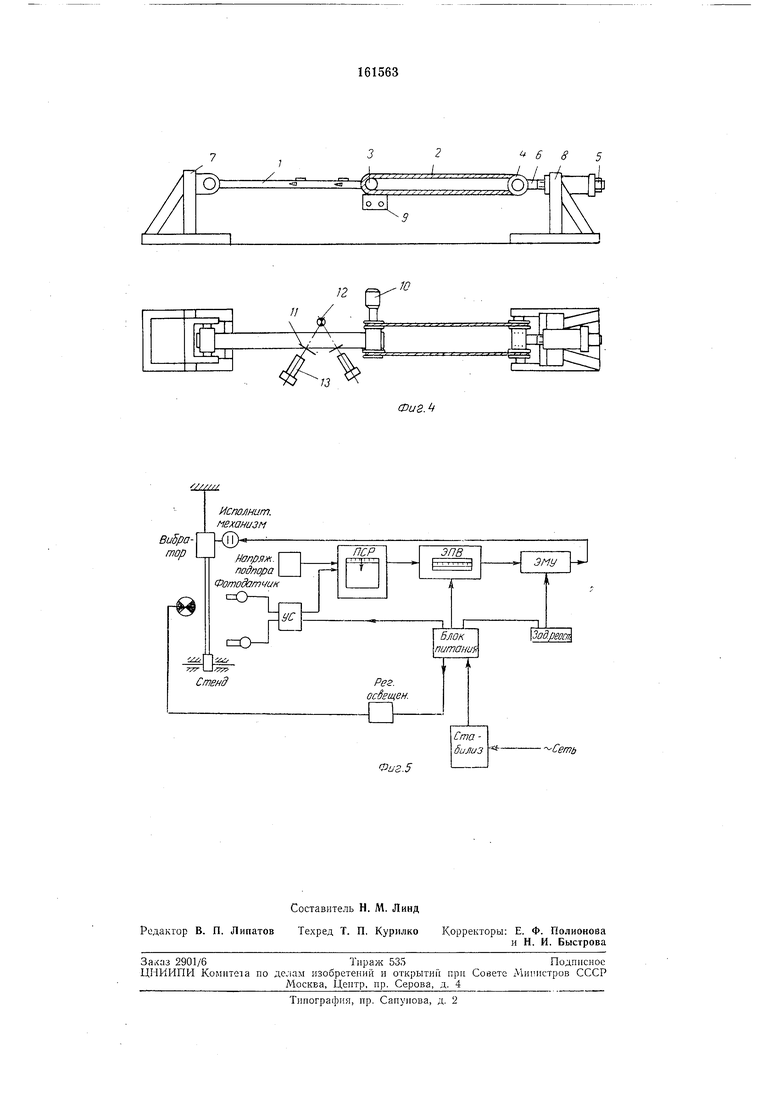
Известен способ автоматического поддержания деформировапного состояния образца на усталостную прочность при испытании иа виб.рационных стендах. Описываемый способ отличается от известного тем, что твердое тело (изделие) вводят s режим знакопеременного изгиба со статическими нагрузками или без них, близкий к резонансному, и поддерживают заданный уровень суммы двух разностей амплитуд прогибов в трех базовых точках тремя датчиками иеремещения, а для твердых тел (изделий) с колебанием базового участка, близким к дуге окрулоюсти, поддерживают заданный уровень разности амплитуд в двух точках двумя датчиками перемещения. Сигналы .датчиков перемещення, пропорциональные амплитудам колебания базовых точек, попарно вычитают и складывают (для трех точек), их сумму (разность для двух точек) интегрируют за период колебания и усиливают, после чего в виде сигнала подаю на привод вибратора следящей системы с записью величины деформации на самописце. Описываемый снособ позволяет повысить точность при измерениях, а также увеличить срок службы изделия при вибрационных нагрузках. ВЫ в одной точке; на фиг. 2 и 3 - амплитуды колебаний в различных точках; на фиг. 4 - схема стенда для испытания образцов лонжеронов на выносливость при знакопеременном изгибе; на фиг. 5 - блок-схема следящей системы. При различных опорных моментах (в начале и конце опыта) кривизна в среднем сечении первой балки меньше, чем у второй, и, следовательно, напряженные состояния их различны. Пусть длинная балка с достаточно л естким поперечным сечением подвержена знакопеременному изгибу, вызываемому силой с частотой, близкой к собственной частоте балки, и статическому растялсенню или , так что кручением пренебречь. Тогда для поддержания заданного уровня деформпрсванного состояния изгиба в процессе колебания на определенном участке, где деформации достигают максимального значения, достаточно поддерживать заданный уровень кривизны. Пусть на этом достаточно малом участке, по .сравнению с длиной балки, фиксируется амплитуда кОоТебаний прогиба W на необходимой плоской линии в трех точках. Прогиб W, отсчитываемый от оси Л , согласно фиг. 2, на этой линии балки есть функция координаты X и времени t: Обозначим, согласно фиг. 2, амплитуду в точ ке О f(x-At) fo; амплитуду в точке 1 f(Xit)fамплитуду в точке 2 f(x, + 60 fa. Определим кривизну в даиный момент времени на выбраппом необходимого размера (малом) участке. Для этого разложим функцию W в ряд X для фиксированного момента t: fo f - А) /, - f(x,) + k(-ti) А- --/ (X, h /(1 + б) fi + ГЫб + f (Al)63 + +4 г () 63. о Предполагаем, что участок такого размера и формы собственных функний таковы, что остаточными членами, но сравнению с членами, содержащими кривизну, можно пренебречь с заданной точностью. Тогда кривизна х - 1(х) равна (iOA(A-5) (/o-fi) +-f (h-h. Удобнее выбирать три точки в зоне максимальной кривизны нри условии А б. Тогда кривизна к равна хА2 (Д-fo) + (h-h.(2) Если кривизна на данном участке такова, что кривая прогиба совпадает с соприкасаюш,ейсл окружностью в точке X, тогда кривизна , где R - радиус соприкасающейся окRружности будет онределяться лишь разностью двух точек, что следует из формулы (2), но может быть показано независимо. Согласно фиг. 3, если известна разность, то радиус окружности определяется формулой J., 2 Л-Л , R т. е. нри достаточной большой базе А, по сравнению с разностью амплитуд fi - fa, кривизна прямо пропорциональна разности амплитуд. Заметим, что в этом случае у балки не может быть угловых перемещений, как у твердого тела. Если оиа совершает такие колебания, то при изменении разности амплитуд в двух точках разность перемещеиий в результате углового перемещения балкн, как твердого тела, должна быть учтена или исключена тем или иным способом. Таким образом, для поддержания уровия деформированного состояния балки на определенном ее участке, где достигаются максимальные деформации, по сравнению с деформациями в других ее участках, надо ноддерживать залТ,аиный уровень суммы двух разностей по трем точкам, согласно уравиеиию (2), или поддерживать уровень разности в двух точках, согласно уравнению (3). Поддержание уровня деформированного состояния на определенном участке балки путем поддержания соответствующих разностей осуществляют с помощью следящей системы с тремя илн двумя датчиками перемещения - фотоэлемеитами, с автоматической занисью - контролем кривизны. Описываемый способ поддержания стационарного деформированного состояния был нримеиеи и проверен на стенде для иснытаний ооразцов лонжерона вертолетов. Образец лонжерона / растягивается осевой силой посредством тросов 2, перекинутых через блоки 3 и 4. Натяжеиие тросов создается виитом 5. Нагрузка контролируется динамометром 6. Система образца и тросов подвешена на стойках 7 и S. Образец приводится в колебание механическим вибратором нанравленного, действия 9, шестерни которого нриводятся во вращение двигателем постоянного тока 10. Шторки 11 перекрывают лучи света от осветителя 12 к датчикам 13. Принции работы состоит в следующем. Два фотоэлектрических датчика, содержащие в евоей схеме осветитель и фотоумножитель, устанозленные на заданном расстоянии но длине образца, нри его колебаиии, выдают сигналы, одннаковые но фазе и ироиорциональные амплитудам колебаний базовых точек образца. На снециальиом электроииом устройстве сигиалы усиливаются и вычитаются один из другого. Далее сигнал разности проходит выпрямление и интегрироваиие. Полученная э. д. с. подается на мост электронного автоматического нотенциометра, который посредством исполнительного механизма ноддерживает заданную тензометрированием разность амнлитуд колебаннй образца. В целом следящая система (фиг. 5) состоит из фотоэлектрических датчиков, блока усиления, сравнения и интегрирования разности сигнала, электронного потенциометра ЭПВ, имеющего регистрирующее устройство, и исиолнительного механизма. Как сказаио выше, фотоэлектрический дагчик состоит из осветителя и фотоумножителя, которые ра положены с двух сторон образца. Поток света от осветителя попадает на полупрозрачную иластинку, расположенную на торцовой частн тубуса - бленды фотоумножителя. Шторка из тонкого алюминия, нриклеенная к образцу, ири его колебании нерекрывает ноток света, вызывая на фотокатоде заряды, проиорциоиальные освещенности. Осветитель состоит из матовой лампочки, освещающей полунрозрачные стекла двух датиков. Далее свет через объектив попадает иа катод фотоумиожителя. Фотоумножители собраиы в укреиленных а стойках металлических корпусах, которые аншщают их от ностороинего свгта и от возействия виешних магнитных иолей.
ода лампы. Анодные нагрузки лампы создаются двумя одинаковыми обмотками трансформатора, которые включены навстречу друг к другу. Вследствие этого переменные составляющие в анодных цепях лампы, пропорциональные сигналам фотоумножителей, оказываются сдвинутыми по фазе на 180°. Так как сигналы по своим амплитудам различны, то во вторичной обмотке трансформатора возникает переменная э. д. с., пропорциональная разности двух сигналов; аналогично - с тремя сигналами: иопарпо вычитаются н складываются.
Выпрямленный двухнолуиернодиой схемой сигнал интегрьрустся и фильтруется. Полоса пропускаемых частот фильтра соответствует основной частоте колебаний образца (40-н гц).
В результате на выходе из блока получается постоянная э. д. с., величина которой пропорциональна сумме разности амплитуд колебаний трех базовых точек образца или разности амплитуд колебаний двух базовых точек.
Блоком регистрации служит широко распространенный электронный автоматнческнй потенциометр тииа ПСР-1, имеющий линейную шкалу, отградуированную в милливольтах, и двухконтактное трехнознционное регулирующее устройство. Кривизна прогибов лонжерона непрерывно записывается на бумажной ленте прибора, а отклонение этой величины за допустимые пределы приводит в действие исполннтельный механизм, восстанавливающий заданные параметры испытаннй лонжерона.
Для увеличения точности работы следящей системы схема автоматического потенциометра используется лишь в небольшом диапазоне рабочей амплитуды колебаний образца. Для использования потепциометра на всем
диапазоне амплитуд в схему его моста вводится дополнительная э. д. с. подпора, по знаку противоположная э. д. с. «разности. Геометрическая сумма этих э. д. с. подбирается таким образом, чтобы она укладывалась в днапазон работы автоматнческого потенциометра ПСР-1.
Программа выхода балки на режим осуществляется вручную по показаниям тензодатчиков сопротивления, наклеенных на испытуемый объект.
Предмет изобретения
1.Способ определения усталостной прочноетн, основанный на автоматнческом поддержании дeфop :aцпн твердого тела (например, лопасти вннта вертолета), отличающийся тем, что, с повыщення точности н увеличения срока службы изделия на вибрационных нагрузках, твердое тело (пзделне) вводят в режнм знакопеременного изгиба со статическими иагрузками или без HIIX, бл 1зкнй к резонансному, II поддерживают заданный уровень суммы двух разностей амплнтуд прогнбов в трех базовых точках тремя датчиками перемещения, а для твердых тел (изделий) с колебанием базового участка, близким к дуге окрулчности, ноддержнвают заданный уровень разности амплитуд в двух точках двумя
датчиками перемещения.
2.Способ но п. 1, отличающийся тем, что сигналы датчиков перемещения, иропорциона.тьиые амплитудам колеба 1ия базовых точек, попарно вычитают и складывают (для
трех точек), их сумму (разность для двух точек) интегрируют за период колебания и усиливают, после чего г виде сигнала подают на привод внбратора следящей системы с заннсью величины деформации иа самоннсце.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ДАННЫХ ПЛОЩАДНЫХ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 1971 |
|
SU314173A1 |
| СПОСОБ СУММИРОВАНИЯ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 1966 |
|
SU182352A1 |
| УНИВЕРСАЛЬНАЯ МАШИНА ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ | 1964 |
|
SU163773A1 |
| Устройство для определения плотности закрепления упругих тел, например, балок или пластин | 1934 |
|
SU44055A1 |
| БИЕЬЛИОТЕКАftATCWTUfLTtJi'v 3 ^..l*. s | 1972 |
|
SU340932A1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670570C1 |
| ПУЛЬТ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1965 |
|
SU171629A1 |
| УСТАНОВКА ДЛЯ ПРАВКИ ТРУБ И ПРУТКОВ | 1973 |
|
SU408686A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ИЗГИБНОЙ ЖЕСТКОСТИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ С ПОМОЩЬЮ КРИВИЗНОМЕРА | 2013 |
|
RU2535645C1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА | 1972 |
|
SU330429A1 |
ЛХf.
. р
f,
7,)
