1
(21)4400965/30-14 (22)31.03.88 (46)30.12.90. Бюл. №48 (75)А.З.Вольфсон (53)615.477.032(088.8)
(56)Заявка Японии №61-43062, кл. А 61 G 1/02, 1986.
(54) ТЕЛЕЖКА ДЛЯ ТР АНСПОРТИРОВКИ БОЛЬНЫХ
(57)Изобретение относится к медицинскому оборудованию и позволяет повысить комфортность за счет обеспечения плавности перекладывания больного с тележки на кровать и обратно и удобство эксплуатации. Для этого промежуточные звенья выполнены в виде рамок, шарнирно соединенных с подъемной платформой 2 и панелью 3, которая имеет возможность качания вокруг приводного ролика 25, закрепленного на платформе 2. На одной из рамок закреплена кулиса, связанная через кривошип с приводом 5. Качание панели 3 совместно с перемещением бесконечной ленты 4 обеспечивает плавное перекладывание больного с тележки на кровать в направлении обеих боковых сторон тележки. 1 з.п. ф-лы, 5 ил.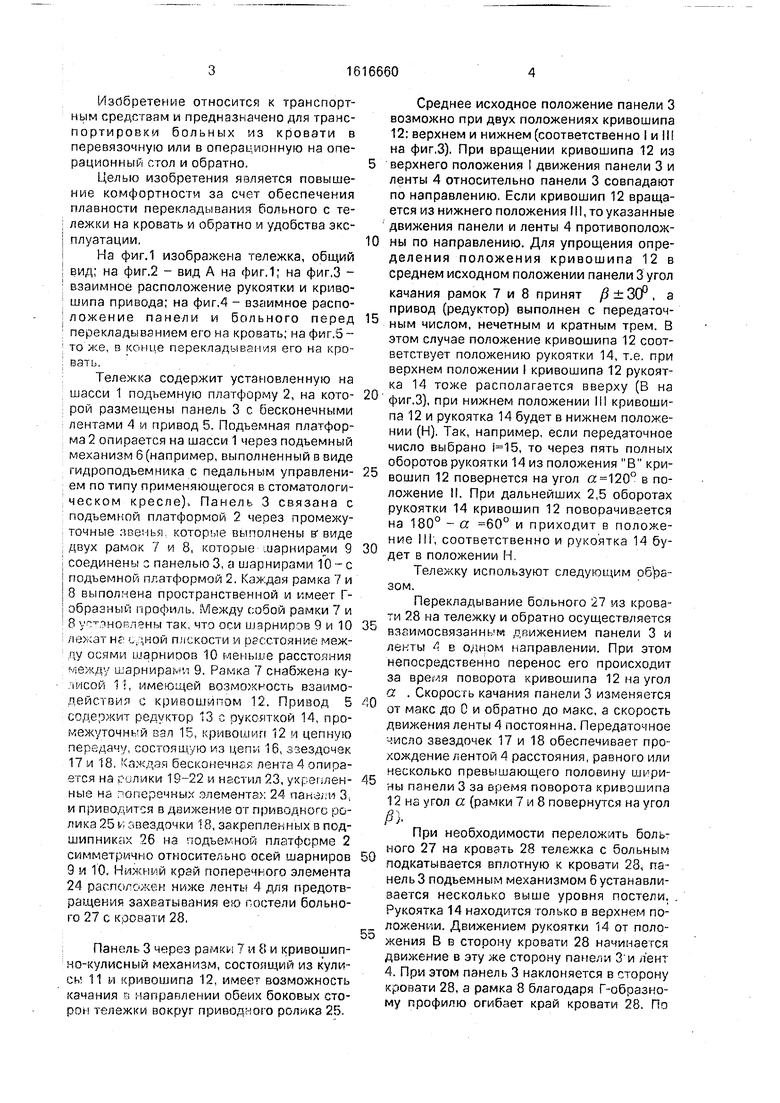
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕЖКА-ПОДЪЕМНИК ДЛЯ БОЛЬНЫХ | 2008 |
|
RU2364384C1 |
| ТЕЛЕЖКА-ПОДЪЕМНИК ДЛЯ БОЛЬНЫХ | 2012 |
|
RU2520041C2 |
| Тележка-подъемник для больных | 1990 |
|
SU1777863A1 |
| Узел управления туалетным устройством, установленным на медицинской кровати | 2018 |
|
RU2692304C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И ПЕРЕКЛАДЫВАНИЯ ПАЦИЕНТОВ | 2007 |
|
RU2331401C1 |
| Агрегат для перемещения лежачих больных - больничный робот | 2018 |
|
RU2724824C2 |
| ФУНКЦИОНАЛЬНАЯ МЕДИЦИНСКАЯ КРОВАТЬ (ВАРИАНТЫ) | 2010 |
|
RU2447872C1 |
| Устройство для разработки движений в суставах конечностей | 1985 |
|
SU1297855A1 |
| ПОДЪЕМНИК ДЛЯ ТЯЖЕЛОБОЛЬНЫХ | 1970 |
|
SU280772A1 |
| Тележка-подъемник для транспортирования больных | 1988 |
|
SU1574221A1 |
Изобретение относится к медицинскому оборудованию и позволяет повысить комфортность за счет обеспечения плавности перекладывания больного с тележки на кровать и обратно и удобство эксплуатации. Для этого промежуточные звенья выполнены в виде рамок, шарнирно соединенных с подъемной платформой 2 и панелью 3, которая имеет возможность качания вокруг приводного ролика 25, закрепленного на платформе 2. На одной из рамок закреплена кулиса, связанная через кривошип с приводом 5. Качание панели 3 совместно с перемещением бесконечной ленты 4 обеспечивает плавное перекладывание больного с тележки на кровать в направлении обеих боковых сторон тележки. 1 з.п.ф-лы, 5 ил.
Фиа,1
N.
a
O
Os
ON О
Изобретение относится к транспортным средствам и предназначено для транс- портмровки больных из кровати в перевязочную или в операционную на операционный стол и обратно.
Целые изобретения является повышение комфортности за счет обеспечения плавности перекладывания больного с те- лежки на кровать и обратно и удобства экс- j плуатации.
I На фиг.1 изображена тележка, общий I вид; на фиг.2 - вид А на фиг.1; на фиг.З - взаимное расположение рукоятки и криво- ; шипа привода; на фиг.4 - взаимное распо- I ложение панели и больного перед ; перекладыванием его на кровать; на фиг.5- : то же, в конце перекладывания его на кро- i вать.
; Тележка содержит установленную на шасси 1 подъемную платформу 2, на кото- ; рой размещены панель 3 с бесконечными i лентами 4 и привод 5. Подъемная платфор- : ма 2 опирается на шасси 1 через подъемный механизм 6 (например, выполненный в виде гидроподъемника с педальным управлени- : ем по типу применяющегося в стоматологи- ческом кресле). Панель 3 связана с I подъемной платформой 2 через промежу- ; точные звенья, которые выполнены в виде ; двух рамок 7 и 8, которые шарнирами 9 I соединены с панелью3, а шарнирами 10--с I подъемной платформой 2. Каждая рамка 7 и I 8 выполнена пространственной и имеет Г- I образный профиль. Между собой рамки 7 и 8 уп--эноБлены так, что оси шарниров 9 и 10 i лежат не одной пмскости и ргсстояние меж- лу осями шарниоов 10 меньше расстояния между шарнирам-, 9. Рамка 7 снабжена кулисой 11, имеющей возможность взаимодействия с кривошипом 12. Привод 5 содержит редуктор 13 с рукояткой 14, про- рлежуточный вэл 15, кривошиг( 12 и цепную передачу, состояш ую из цепи 16, ззездочек 17 и 18, Каждая бесконечная лента 4 опирается на голики 19-22 и настил 23, укрепленные на поперечных элементах 24 пана/ш 3, и приводится в движение от приводного ролика 25 / звездочки 18, закрепленных в подшипниках 26 на подъемной платформе 2 симметрично относительно осей шарниров 9 и 10. край поперечного элемента 24 расположен ниже ленты 4 для предотвращений захватывания ею постели больного 27 с кровати 28.
; Панель 3 через рамк 7 и 8 и кривошип- но-кулисный механизм, состоящий из к ули- сь 11 И кривошипа 12, имеет возможность качания в направлении обеих боковых сторон тележки вокруг приводного ролйка 25.
0
5
0
5
0
5
5
0
5
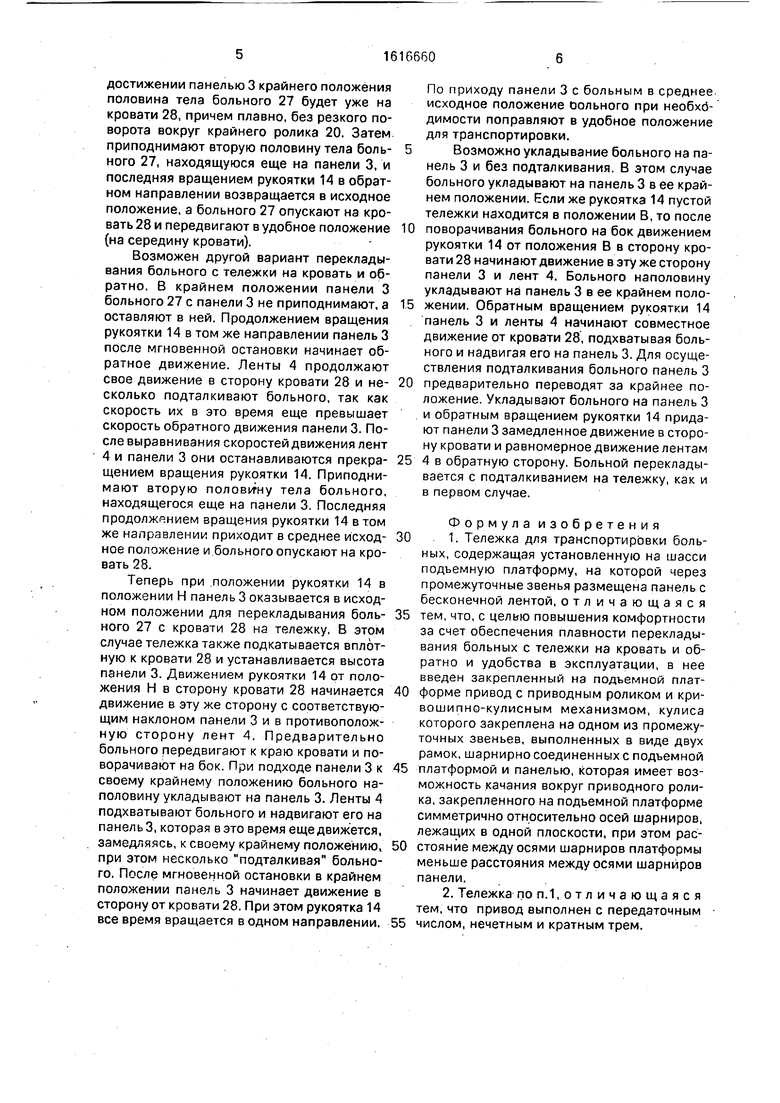
Среднее исходное положение панели 3 возможно при двух положениях кривошипа 12; верхнем и нижнем (соответственно 1 и III на фиг.З). При вращении кривошипа 12 из верхнего положения I движения панели 3 и ленты 4 относительно панели 3 совпадают по направлению. Если кривошип 12 вращается из нижнего положения 111, то указанные движения панели и ленты 4 противоположны по направлению. Для упрощения определения положения кривошипа 12 в среднем исходном положении панели 3 угол
качания рамок 7 и 8 принят /3±ЗОР, а привод (редуктор) выполнен с передаточным числом, нечетным и кратным трем. В этом случае положение кривошипа 12 соответствует положению рукоятки 14, т.е. при верхнем положении I кривошипа 12 рукоятка 14 тоже располагается вверху (В на фиг.З), при нижнем положении III кривошипа 12 и рукоятка 14 будет в нижнем положении (Н). Так, например, если передаточное число выбрано , то через пять полных оборотов рукоятки 14 из положения В кривошип 12 повернется на угол в положение II. При дальнейших 2,5 оборотах рукоятки 14 кривошип 12 поворачивается на 180° - а 60° и приходит в положение ИГ, соответственно и рукоятка 14 будет в положении Н.
Тележку используют следующим рб ра- зом.
Перекладывание больного 27 из кровати 28 на тележку и обратно осуществляется взаимосвязанным движением панели 3 и ленты А в одном направлении. При этом непосредственно перенос его происходит за время поворота кривошипа 12 на угол (X . Скорость качания панели 3 изменяется от макс до О и обратно до макс, а скорость движения ленты 4 постоянна. Передаточное число звездочек 17 и 18 обеспечивает прохождение лентой 4 расстояния, равного или несколько превышающего половину ширины панели 3 за время поворота кривошипа 12 на угол а (рамки 7 и 8 повернутся на угол /3).
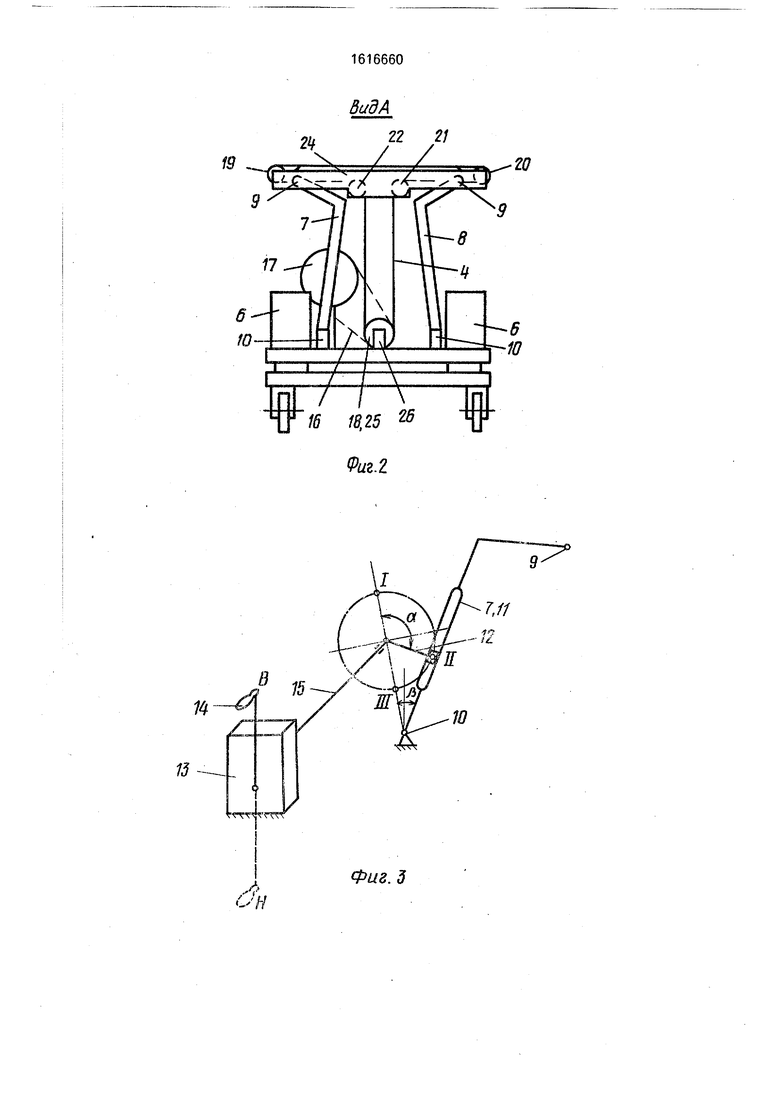
При необходимости переложить больного 27 на кровать 28 тележка с больным подкатывается вплотную к кровати 28, панель 3 подъемным механизмом 6 устанавливается несколько выше уровня постели. Рукоятка 14 находится только в верхнем положении. Движением рукоятки 14 от положения В в сторону кровати 28 начинается движение в эту же сторону панели З и лент 4. При этом панель 3 наклоняется в сторону кровати 28, а рамка 8 благодаря Г-о5разно- му профилю огибает край кровати 28. По
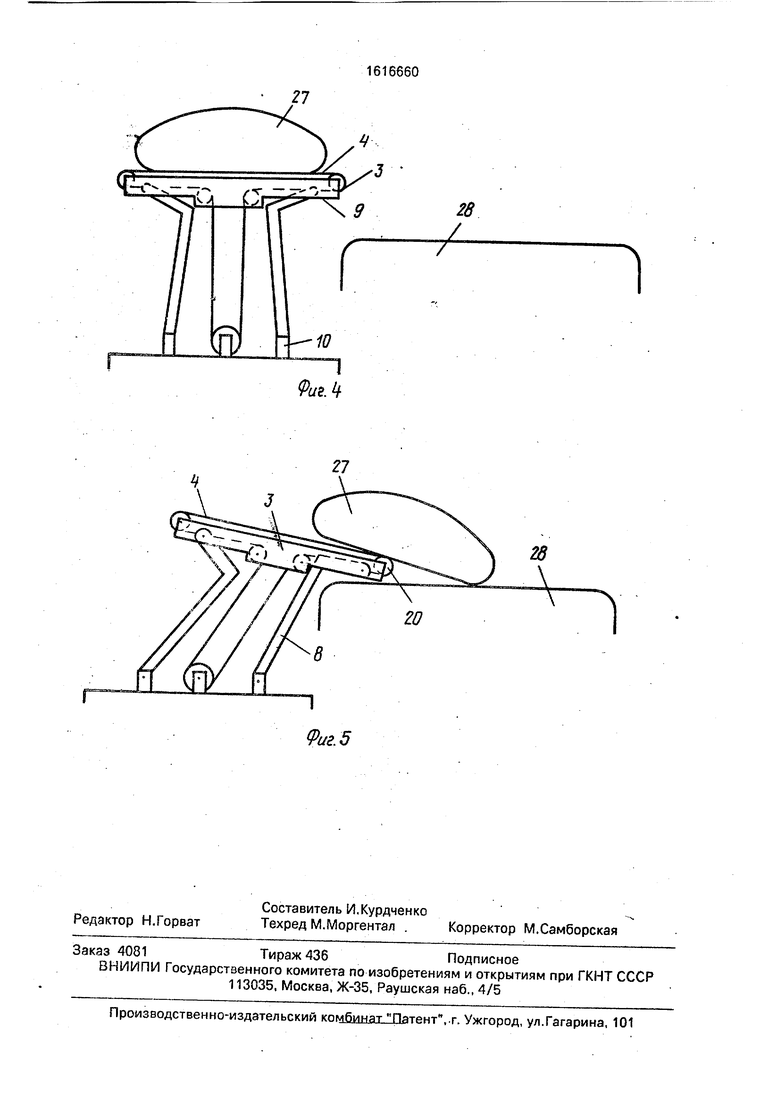
достижении панелью 3 крайнего положения половина тела больного 27 будет уже на кровати 28, причем плавно, без резкого поворота вокруг крайнего ролика 20. Затем приподнимают вторую половину тела боль- него 27, находящуюся еще на панели 3, и последняя вращением рукоятки 14 в обратном направлении возвращается в исходное положение, а больного 27 опускают на кровать 28 и передвигают в удобное положение (на середину кровати).
Возможен другой вариант перекладывания больного с тележки на кровать и обратно. В крайнем положении панели 3 больного 27 с панели 3 не приподнимают, а оставляют в ней. Продолжением вращения рукоятки 14 в том же направлении панель 3 после мгновенной остановки начинает обратное движение. Ленты 4 продолжают свое движение в сторону кровати 28 и не- сколько подталкивают больного, так как скорость их в это время еще превышает скорость обратного движения панели 3. После выравнивания скоростей движения лент 4 и панели 3 они останавливаются прекра- щением вращения рукоятки 14. Приподнимают вторую полови-ну тела больного, находящегося еще на панели 3. Последняя продолжением вращения рукоятки 14 в том же направлении приходит в среднее исход- ное положение и.больного опускают на кровать 28.
Теперь при .положении рукоятки 14 в положении Н панель 3 оказывается в исходном положении для перекладывания боль- ного 27 с кровати 28 на тележку, В этом случае тележка также подкатывается вплотную к кровати 28 и устанавливается высота панели 3. Движением рукоятки 14 от положения Н в сторону кровати 28 начинается движение в эту же сторону с соответствующим наклоном панели 3 и в противоположную сторону лент 4. Предварительно больного передвигают к краю кровати и поворачивают на бок. При подходе панели 3 к своему крайнему положению больного наполовину укладывают на панель 3. Ленты 4 подхватывают больного и надвигают его на панель 3, которая в это время еще движется, замедляясь, к своему крайнему положению. при этом несколько подталкивая больного. После мгновенной остановки в крайнем положении панель 3 начинает движение в сторону от кровати 28. При этом рукоятка 14 все время вращается в одном направлении.
По приходу панели 3 с больным в среднее исходное положение «зольного при необхб- димости поправляют в удобное положение для транспортировки.
Возможно укладывание больного на панель 3 и без подталкивания. В этом случае больного укладывают на панель 3 в ее крайнем положении. Если же рукоятка 14 пустой тележки находится в положении В, то после поворачивания больного на бок движением рукоятки 14 от положения В в сторону кровати 28 начинают движение в эту же сторону панели 3 и лент 4. Больного наполовину укладывают на панель 3 в ее крайнем положении. Обратным вращением рукоятки 14 панель 3 и ленты 4 начинают совместное движение от кровати 28, подхватывая больного и надвигая его на панель 3. Для осуществления подталкивания больного панель 3 предварительно переводят за крайнее положение. Укладывают больного на панель 3 и обратным вращением рукоятки 14 придают панели 3 замедленное движение в сторону кровати и равномерное движение лентам 4 в обратную сторону. Больной перекладывается с подталкиванием на тележку, как и в первом случае.
Формула изобретения 1. Тележка для транспортировки больных, содержащая установленную на шасси подъемную платформу, на которой через промежуточные звенья размещена панель с бесконечной лентой, отличающаяся тем, что, с целью повышения комфортности за счет обеспечения плавности перекладывания больных с тележки на кровать и обратно и удобства в эксплуатации, в нее введен закрепленный на подъемной платформе привод с приводным роликом и кри- вошипно-кулисным механизмом, кулиса которого закреплена на одном из промежуточных звеньев, выполненных в виде двух рамок, шарнирно соединенных с подъемной платформой и панелью, которая имеет возможность качания вокруг приводного ролика, закрепленного на подъемной платформе симметрично относительно осей шарниров, лежащих в одной плоскости, при этом расстояние между осями шарниров платформы меньше расстояния между осями шарниров панели.
7 I 16 18,25
Фиг.2
22 2} / /
Фиг. д
(Риг.5
28
JL
