Изобретение относится к специальному роботостроению и предназначено для использования в лечебных и санаторных учреждениях, главным образом при перемещении лежачих больных.
Известны агрегаты для перемещения лежачих больных, включающие несущую и нагрузочную или нагрузочные конструкции, установленные на самоходном или на несамоходном статически уравновешенном шасси, оснащенные или не оснащенные электронным устройством управления, сенсорной системой на основе компьютерного зрения, навигационной и позиционирующей системами, системой дистанционного управления и блоком интеллектуального принятия решений и выработки управляющих сигналов для приводов агрегата по результатам обработки информации от сенсорной, навигационной и позиционирующей систем и от установленной на устройстве управления компьютерной программы с выполняемой миссией, а на несущей конструкции которых установлены устройства управляемого изменения высоты положения и угла наклона нагрузочной или нагрузочных конструкций, непосредственно принимающих нагрузку от веса тела больного и удерживающих тело больного при его подъеме, транспортировке и укладывании на кровать, на каталку, на стол или на пол.
Наиболее близкими к изобретению по назначению и функциональности являются разработанный в США агрегат Battlefield Extraction-Assist Robot (BEAR) для эвакуации раненых, созданный исследовательской группой японского института физико-химических исследований и компанией Sumitomo робот-сиделка Robear для больниц, а также робот RIBA (Robot for Interactive Body Assistance) Японского института физических и химических исследований ВМС RTKEN и компании Tokai Rubber Industries (TRI).
Робот BEAR предназначен, главным образом, для эвакуации раненых из опасной зоны, но может использоваться, также, для переноски лежачих больных в лечебных учреждениях. Несущие конструкции робота BEAR имеют вид двухзвенной стойки с приведенными шарнирами в месте закрепления стойки на шасси и в месте соединения звеньев стойки. Нагрузочные конструкции робота имеют вид трехзвенных манипуляторов с ортогональными и параллельными шарнирами и могут поднимать и удерживать груз до 230 кг. Действиями робота управляет оператор с помощью специальной перчатки, отслеживающей движения руки оператора. Главной особенностью этого робота является шасси-трансформер, способное принимать конфигурацию двухколейного гусеничного шасси, или одноосного шасси с опорой на торцы гусеничных тележек или большие колеса и балансировкой в режиме «Segway».
Разработчики робота Robear заявляют о его способности выполнять ряд простых манипуляций по уходу за больными - поднимать их, переносить, усаживать в коляску или инвалидное кресло. Также, заявлено, что робот-сиделка снабжен специальными шарнирными суставами и тремя видами тактильных сенсоров, способными распознавать материю на ощупь, и оснащен мягкой обшивкой. Эти меры должны минимизировать возможность малейшего вреда пациентам от неосторожного движения Robear. Последние версии конструкции Robeara обладают 24 подвижностями, часть которых обеспечивает гибкость несушей стойки-туловища и способность наклонять стойку к полу. Нагрузочные конструкции робота также имеют вид многозвенных манипуляторов на ортогональных и параллельных шарнирах, что должно было позволять роботу поднимать больного с пола и укладывать его в кровать или в кресло. При этом всеми действиями робота управляет специально обученная медсестра, подающая команды на приводы конструкции робота посредством сенсорных панелей на нагрузочных «конечностях» робота. Отличительной особенностью робота разработчики считают применение приводов с низкими коэффициентами редукции, что придает «конечностям» и узлам робота высокую «чувствительность» и «реактивность» на изменения нагрузки. Также существенным усовершенствованием нового робота считают относительно небольшую опорную базу, обеспечивающую маневрировать робота при перемещении больного в ограниченном пространстве и при проходе через дверные проемы. Остойчивость робота при подъеме больного обеспечивают за счет использования выдвигаемых рычагов-аутригеров, компенсирующих опрокидывающий момент.
Его предшественник робот RIBА весит 180 кг, и он может транспортировать людей весом до 61 кг. Робот имеет 12 подвижностей. Заявлено, также, что робот распознает лица и голоса, выполняет голосовые команды и ориентируется по видео- и аудиоданным собственной сенсорной системы и быстро адаптируется к малейшим изменениям в окружающей среде.
При всех этих заявленных полезных свойствах и характеристиках эти сложнейшие технические изделия не прошли стадию испытаний и демонстраций и остаются экспериментальными образцами.
Важнейшим недостатком всех известных больничных роботов для перемещения больных в лечебных учреждениях является то, что они не выполняют ключевую процедуру при осуществлении перемещения лежачих больных - безопасного подъема тела больного с носилок, с пола или с кровати без изменения позы больного. Эта процедура является главной причиной возникновения травм спины у обслуживающего персонала и источником стрессообразующих и травмоопасных для самого больного факторов. Представленные роботы не востребованы пользователями из-за того, что заложенные в их конструкции и, соответственно, отраженные в их стоимости десятки подвижностей и большой запас нагрузочной способности не реализуются без наличия людского персонала. Больничный персонал «вручную» или с использованием специальных подъемников и систем обвязки тела больного отделяет его от кровати, каталки или кресла, чтобы переправить его на несущие конструкции робота, или снять с них больного. В результате, эффективность применения роботов-помощников стоимостью в десятки тысяч долларов США оказывается чрезвычайно низкой.
Задачей изобретения является создание автономного самоходного или не самоходного робототехнического агрегата, способного без непосредственного участия людского персонала в безопасном режиме отделять тело больного от кровати, носилок или от пола, поднимать его, перемещать по лечебному учреждению и укладывать в назначенное место в безопасном режиме без изменения позы.
Указанная задача решается тем, что агрегат для перемещения больных выполняют в виде установленной на самоходном или на несамоходном статически уравновешенном шасси, оснащенным или не оснащенным электронным устройством управления, сенсорной, навигационной и позиционирующей системами несущей конструкции с установленным на ней с возможностью управляемого изменения высоты и угла наклона нагрузочного стола-платформы с пенетрационной способностью, обеспечиваемой столу-платформе виброходным покрытием и вибраторами, или перемещающимися по верхней и нижней поверхностям стола-платформы приведенными от мотор-редуктора тянущими полотнами, или сообщаемыми виброприводом столу-платформе высокочастотными несимметричными возвратно-поступательными движениями малой амплитуды. Дополнительно агрегат оснащают страховочными ремнями для удержания тела больного на столе-платформе при толчках во время движения по помещениям с узостями и препятствиями.
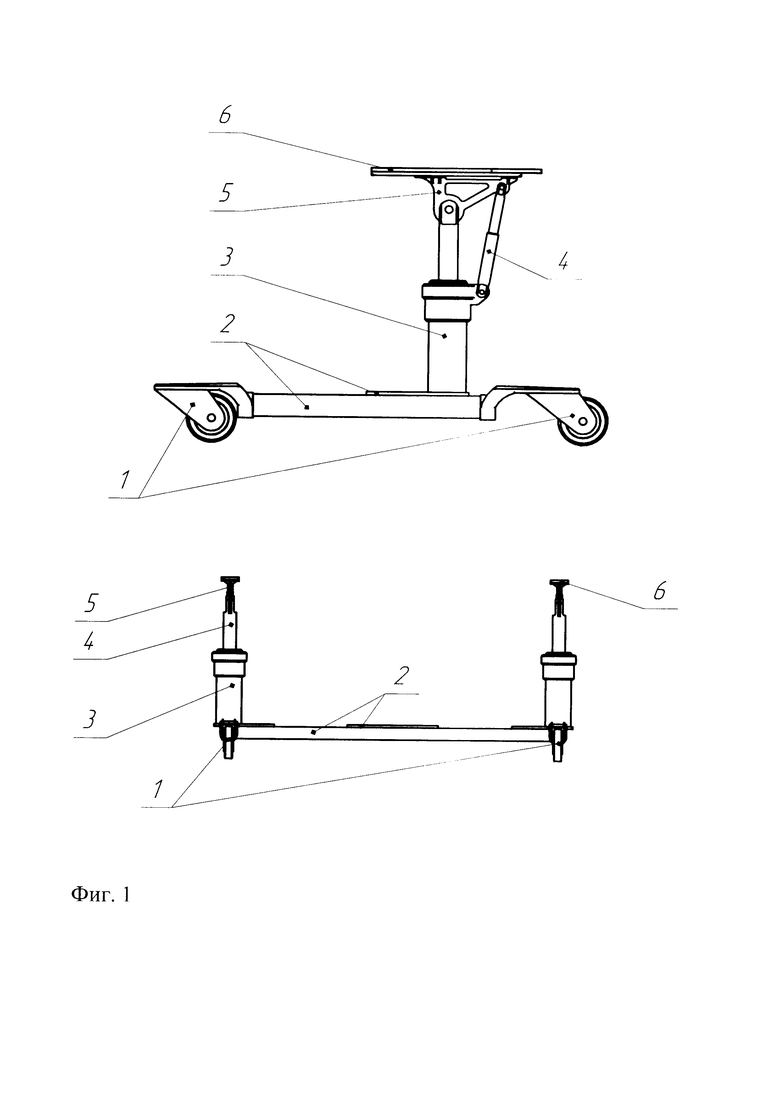
Схематические изображения несущей конструкции агрегата для перемещения больных и пенетраторного стола-платформы представлены на Фиг 1, 2, 3, 4 и 5.
На Фиг. 1 представлен примерный вид несущей конструкции агрегата для перемещения лежачих больных на несамоходном шасси. На схеме отмечены элементы конструкции: 1 - колеса на «рояльном» подвесе; 2 - силовые элементы конструкции; 3 - приводы устройства подъема стола-платформы; 4 - приводы устройства изменения наклона стола-платформы; 5 - устройство изменения угла наклона стола-платформы; 6 -кронштейны крепления стола-платформы.
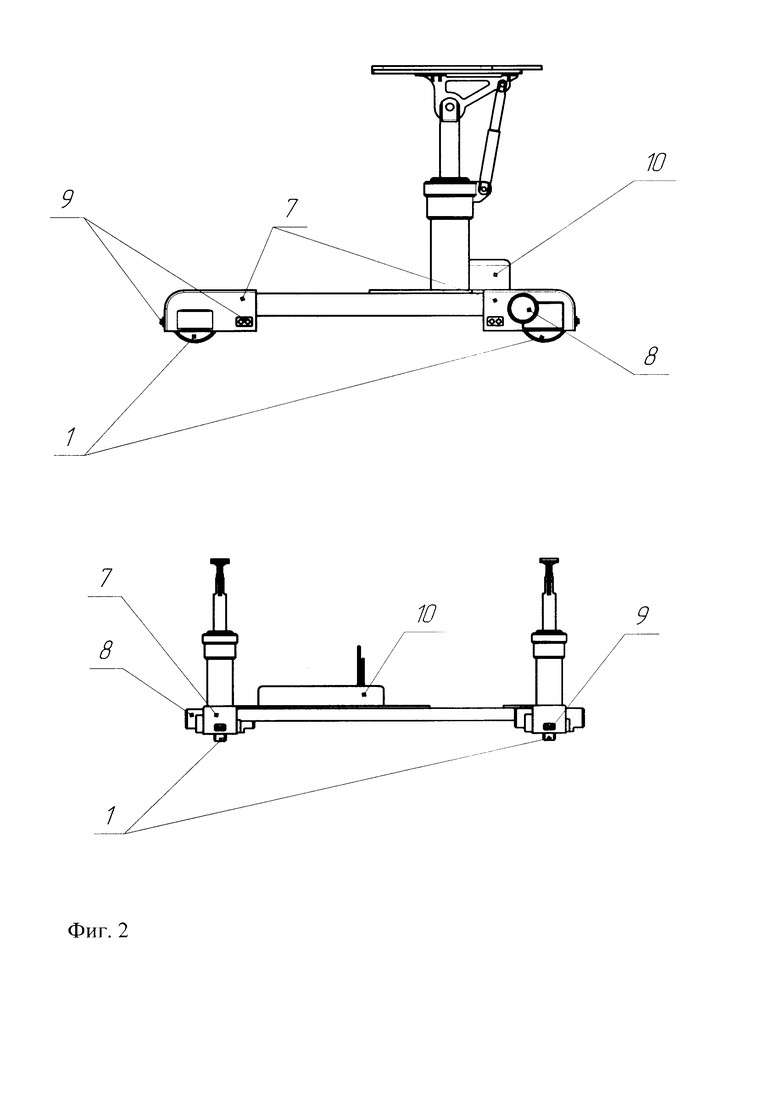
На Фиг. 2 представлен примерный схематический вид несущей конструкции агрегата на самоходном шасси, оснащенным электронным устройством управления, сенсорной, навигационной и позиционирующей системами. На схеме отмечены: 1 -колеса; 7 - приводы вращения колес; 8 - приводы поворота колес; 9 - датчики сенсорной, навигационной и позиционирующей систем; 10 - устройство связи с блоком дистанционного управления роботом.
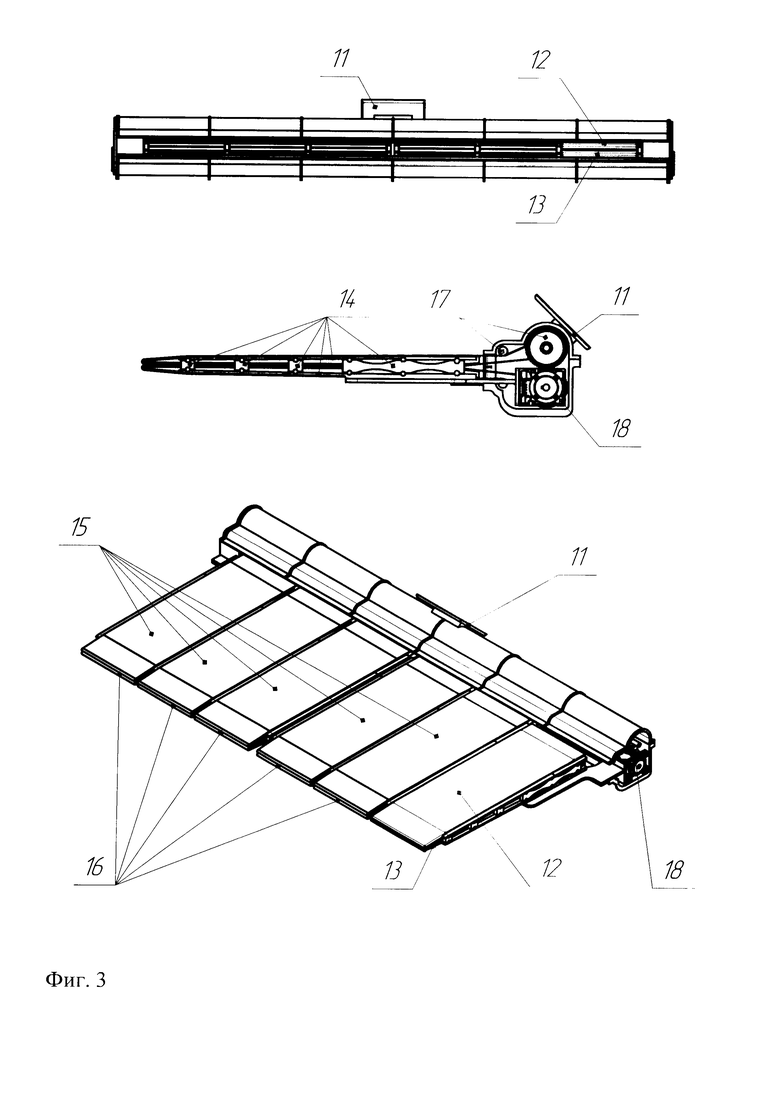
На Фиг. 3 представлен примерный схематический вид нагрузочного пенетраторного стола-платформы с подвижными тянущими полотнами, приведенными шкивами от мотор-редуктора. На схеме отмечены: панель управления, 12 - верхняя панель стола-платформы; 13 - нижняя панель стола-платформы; 14 - несущие перемычки между панелями; 15 -полотно верхней панели; 16 - полотно нижней панели; 17 - приводящий шкив и натяжной механизм нижней панели; 18 - мотор-редуктор привода полотен.
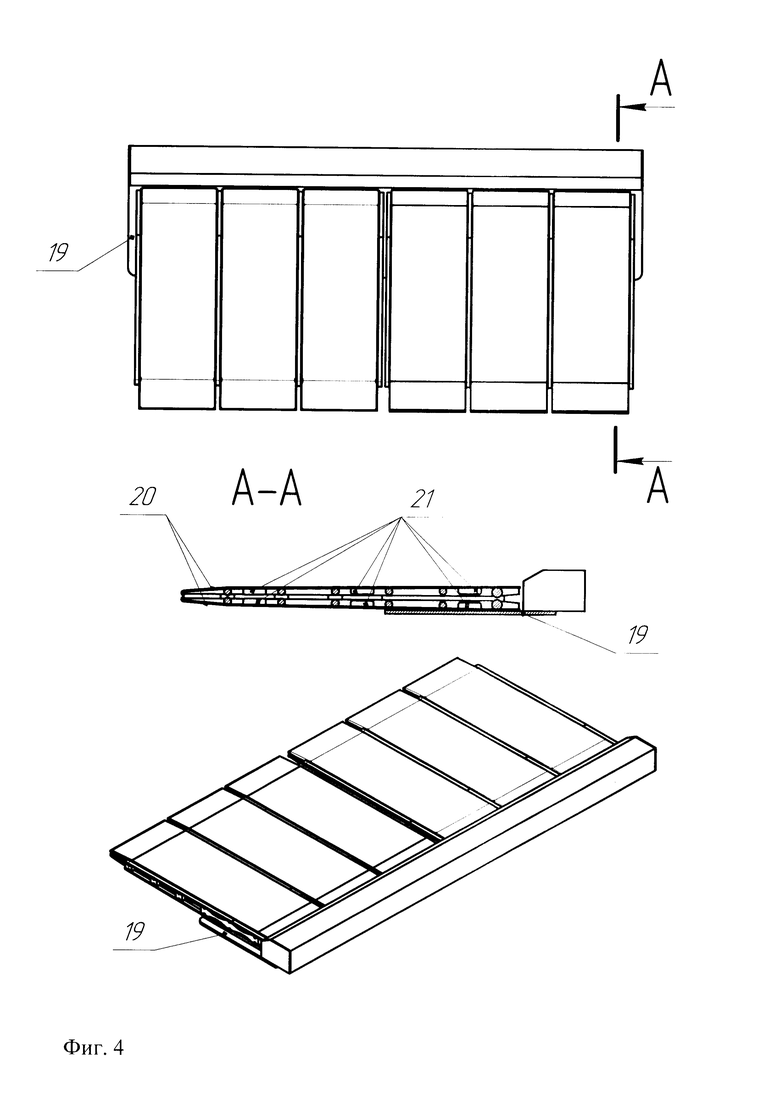
На Фиг. 4 представлен примерный схематический вид нагрузочного пенетраторного стола-платформы с виброходным покрытием в виде наклонного эластичного ворса или гребенчатого покрытия и вибраторами. На схеме отмечены: 19 - несущая конструкция пенетраторного стола-платформы; 20 - виброходное покрытие; 21 - вибраторы.
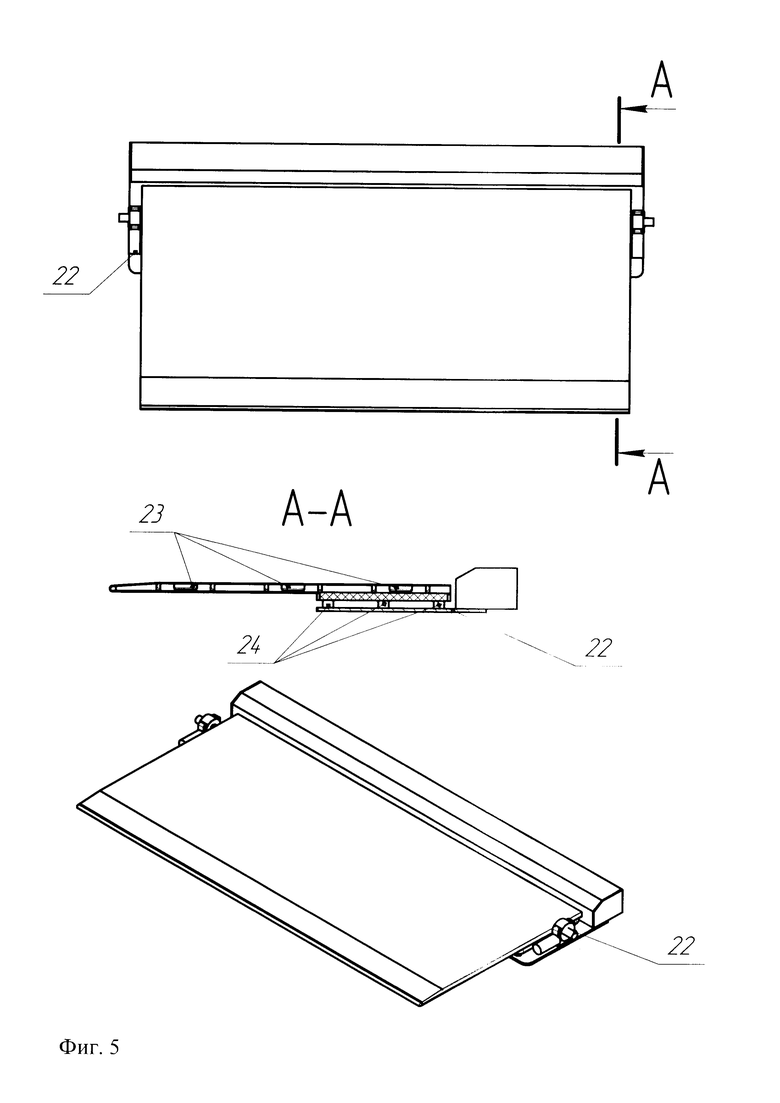
На Фиг. 5 представлен примерный схематический вид конструкции несимметрично вибрирующего пенетраторного стола-платформы. На схеме отмечены: 22 - несущая конструкция стола-платформы; 23 - вибраторы; 24 - эластичные опоры стола-платформы.
Материал полотен и покрытия и численные значения характеристик ворса или гребней, а также характера вибраций не являются объектом данного изобретения и выбираются в зависимости от условий применения робота и основных технических характеристик - мощности приводов, вибраторов и материала покрытия.
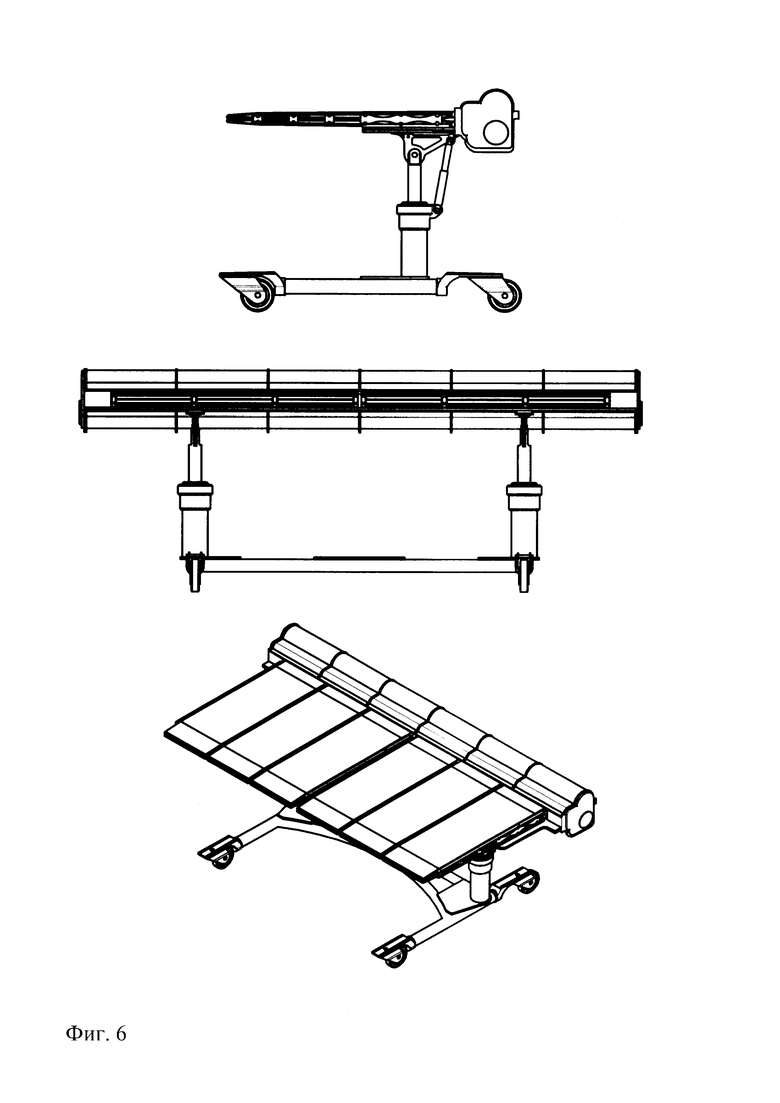
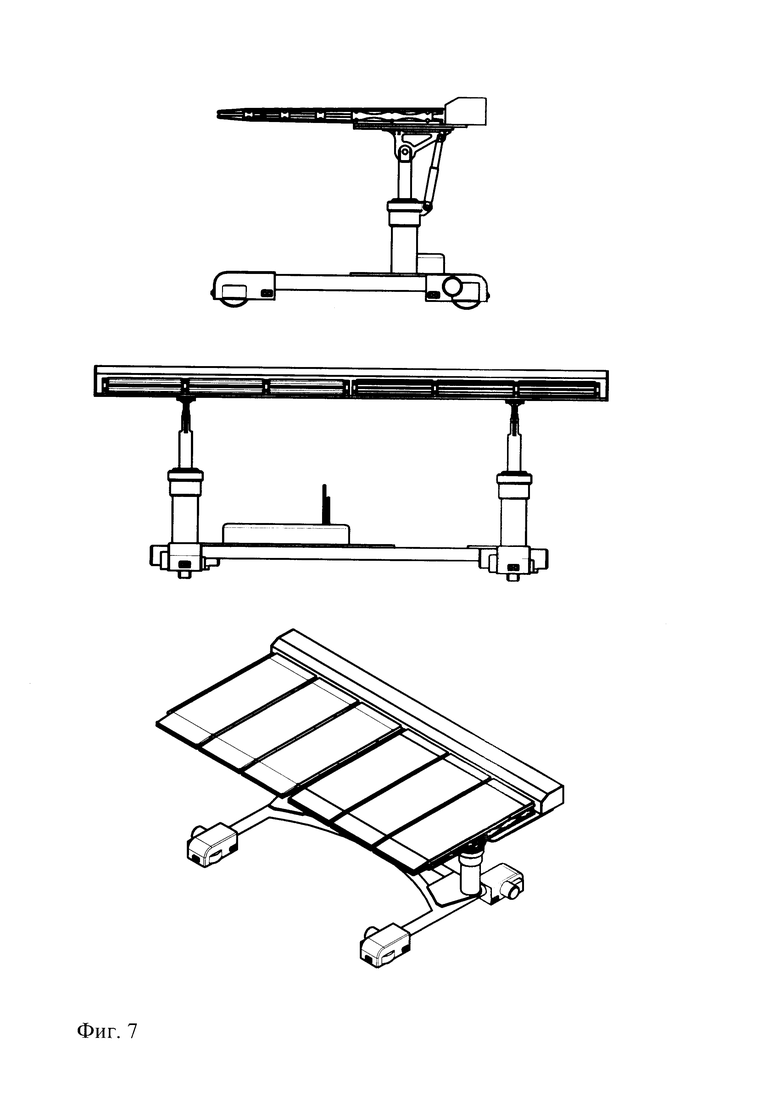
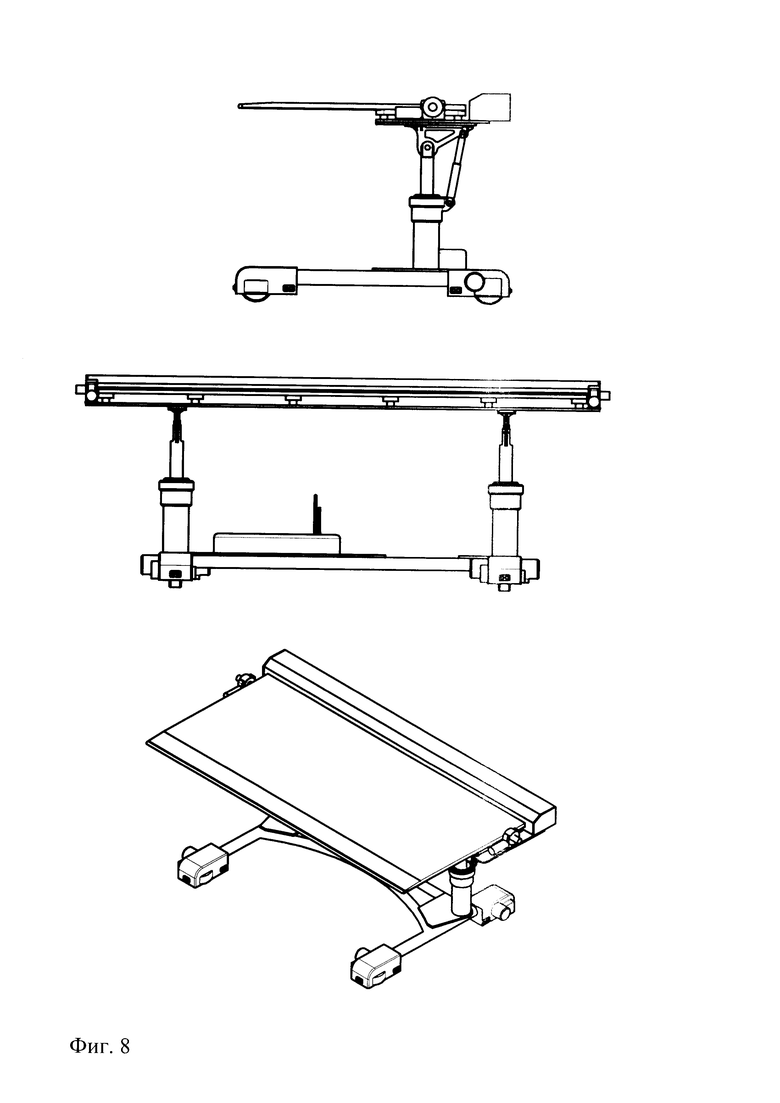
На Фиг. 6, 7 и 8 представлены конфигурации агрегатов для перемещения больных в сборе.
На фиг. 6 представлен примерный вид агрегата на несамоходном шасси с пенетраторным столом-платформой с тянущими подвижными полотнами.
На Фиг. 7 представлен примерный вид агрегата на самоходном шасси и снабженного электронным устройством управления, сенсорной, навигационной и позиционирующей системами с пенетраторным столом-платформой с виброходным покрытием и вибраторами.
На Фиг. 8 представлен примерный вид агрегата на самоходном шасси и снабженного электронным устройством управления, сенсорной, навигационной и позиционирующей системами с пенетраторным столом-платформой с несимметрично вибрирующим столом.
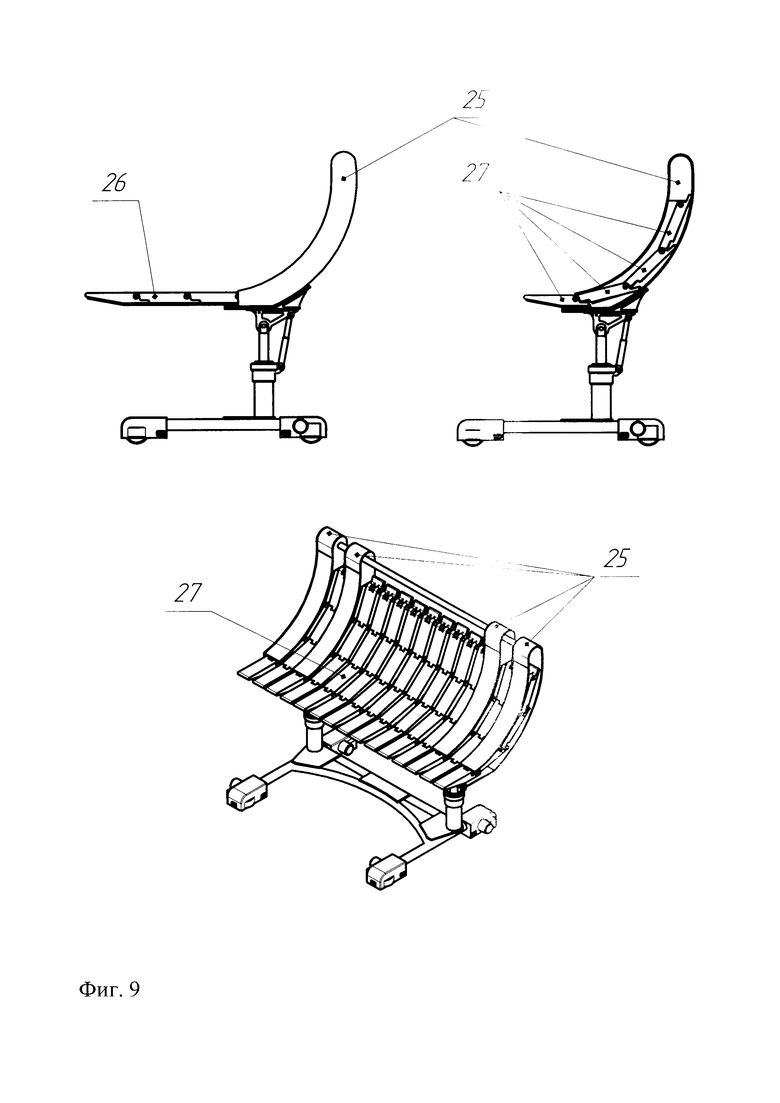
Для улучшения маневренности и повышения скорости передвижения агрегата по лечебному учреждению к больному агрегат выполняют с возможностью уменьшения его поперечных размеров за счет того, что нагрузочный стол-платформу выполняют в виде сборки соединенных шарнирами с ограничением раскрытия продольных створок, которые в транспортном состоянии поднимаются специальным приводом в закрепленные на несущей конструкции агрегата дугообразные коробчатые направляющие.
На Фиг. 9 представлены примерные схематические виды агрегата с нагрузочным столом-платформой в виде створчатой сборки. На схемах отмечены: 25 - дугообразные коробчатые направляющие для шарниров створок; 26 - створки стола-платформы в рабочем положении; 27 - створки стола-платформы в транспортном положении в коробчатых направляющих.
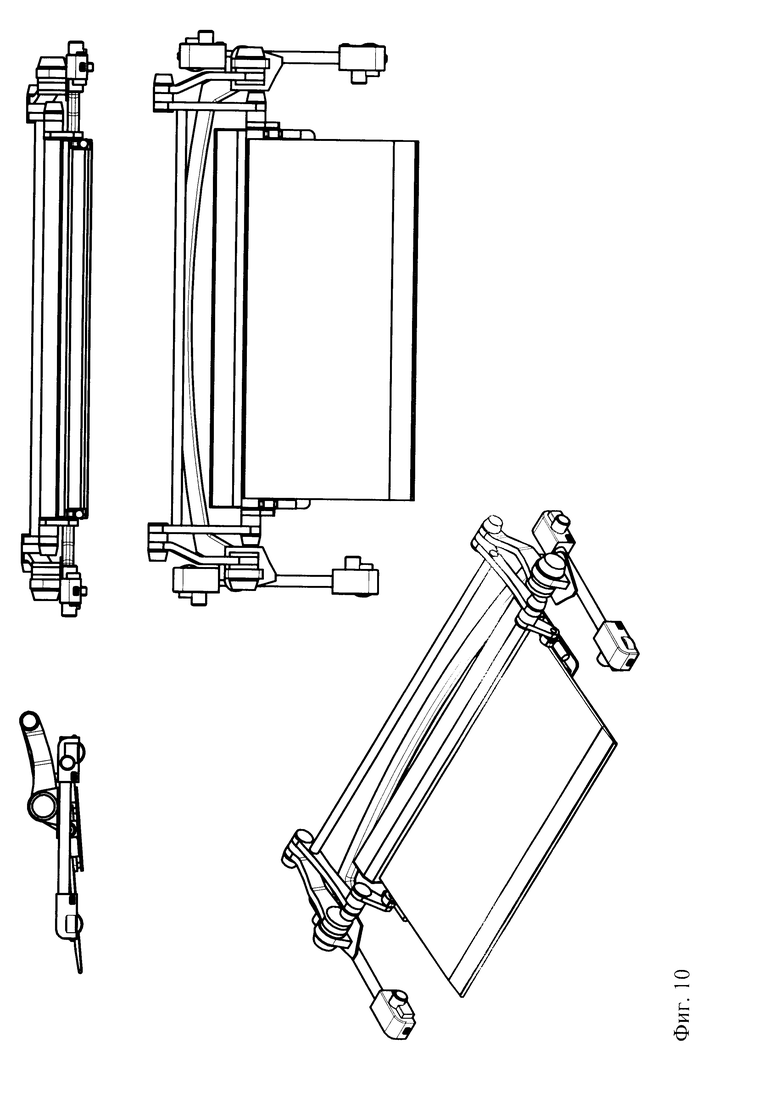
Для обеспечения роботу способности подъема больных с пола несущую конструкцию агрегата выполняют в виде шарнирно-рычажной системы, позволяющей опускать стол-платформу нагрузочной конструкции на уровень подложки движителей шасси. Для этого несущую конструкцию выполняют в виде двух рычажно-шарнирных манипуляторов с установленными на оконечностях приведенными шарнирами, выходные звенья которых соединены балкой, на которой закреплена нагрузочная конструкция агрегата, а длина несущей части больше длины нагрузочного стола-платформы.
На Фиг. 10 примерный схематический вид агрегата в состоянии готовности к пенетрации стола-платформы под тело лежащего на полу больного.
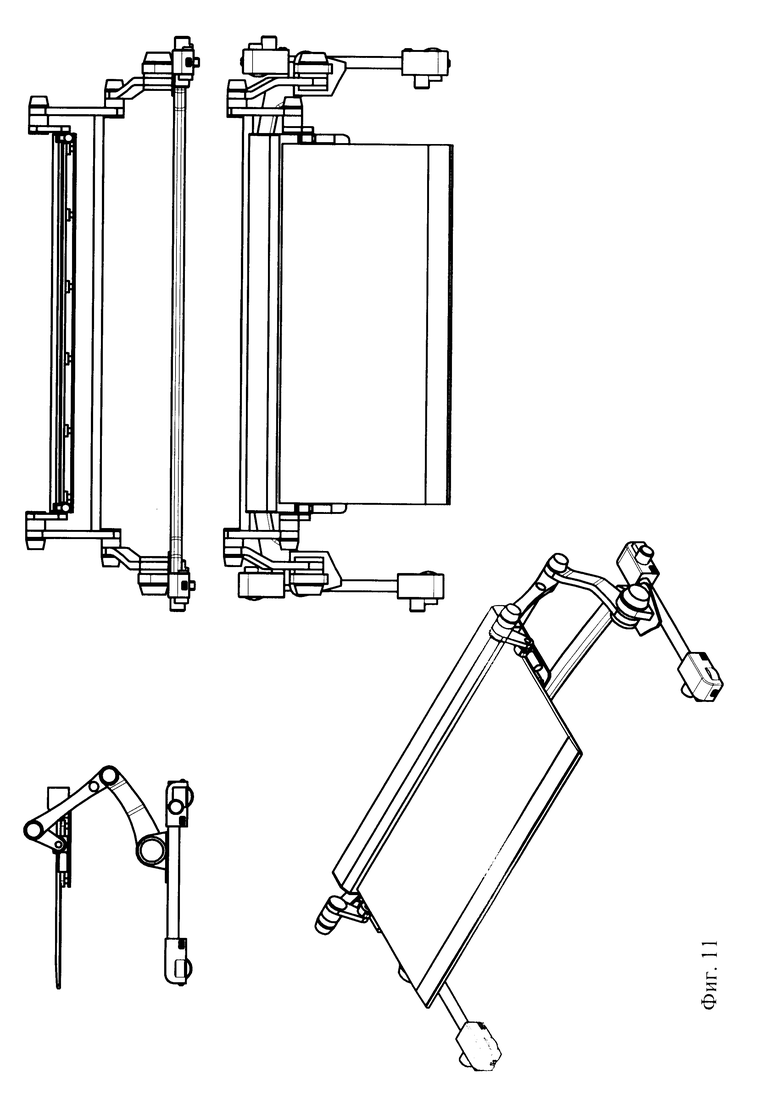
На Фиг. 11 представлен схематический вид агрегата с шарнирно-рычажной несущей конструкцией в фазах подъема стола-платформы с больным и транспортировки его по больничному учреждению.
Работает агрегат для перемещения лежачих больных следующим образом.
Агрегат на несамоходном шасси вручную подводят к кровати, каталке или носилкам, на которых лежит больной, и с помощью пульта управления высотой положения и наклона стола заводят край стола-платформы в место сопряжения тела больного с подложкой (или в зазор между одеждой или простыней/одеялом, на котором лежит больной, и подложкой), включают привод механизма пенетрации стола-платформы и подают агрегат к больному по мере продвижения стола-платформы под тело больного. После завершения продвижения стола-платформы под тело больного с помощью механизмов управления углом наклона стола-платформы и высоты его положения поднимают стол-платформу с больным на необходимую для безопасного и комфортного передвижения высоту и перемещают больного в место назначения. На месте назначения стол-платформу с больным выставляют над кроватью, столом, или иным местом расположения больного и опускают стол на подложку. После этого включают пенетраторный механизм стола-платформы в режиме реверса и подают агрегат от места расположения больного по мере выдвижения стола-платформы из-под тела больного.
Полуавтономным агрегатом на самоходном шасси управляют с пульта на несущей конструкции или с пульта дистанционного управления. Пенетраторным столом-платформой управляют также с дистанционного пульта или с пульта на агрегате.
Автономный агрегат на самоходном шасси с сенсорной, навигационной и позиционирующей системами может выполнять миссии по перемещению больных как в режиме «ручного» управления с пульта управления, так и в телеоператорном или в супервизорном режимах с управлением от пульта дистанционного или удаленного управления, или полностью в автономном режиме с управлением от собственного блока обработки информации от программы с миссией и от сенсорной, навигационной и позиционирующих систем и интеллектуальной выработкой команд на исполнительные механизмы агрегата.
Энергию для приведения в действие электромеханических узлов и электронных устройств агрегата подают на них от встроенного в конструкцию аккумулятора или по кабелю от системы электроснабжения здания лечебного учреждения.
Полезный эффект от применения изобретения в лечебных и санаторных учреждениях будет выражаться, во-первых, в том, что снизятся нагрузки на медперсонал учреждений как в физическом, так и в организационном плане (исчезнет проблема сбора физически сильных сотрудников для перекладки и перемещения больных по учреждению, особенно крупных и грузных, подъем и перекладывание которых представляет организационную и техническую проблему). Во-вторых, снизятся расходы на выплаты и компенсации медработникам за травмы спины, полученные при обслуживании больных при недостатке подъемных приспособлений. В-третьих, снизятся расходы на обустройство зданий лечебных и санаторных учреждений подъемными приспособлениями и на их эксплуатацию и обслуживание. В-четвертых, самое главное, перекладывание и перемещение лежачих больных будет осуществляться безопасным и предельно комфортным для них способом - без изменения позы и без применения травмоопасных обвязок для подсоединения к подъемным устройствам.
Стоит отметить, также, повышение эффективности лечения вследствие снятия ограничений на перекладывания и перемещения больных из-за сложности их осуществления. Любого больного в любом состоянии один оператор больничного робота сможет переложить или транспортировать в указанное место практически дистанционно с помощью больничного робота. Для этого достаточно оснастить лечебное учреждение достаточным количеством больничных роботов, которое рассчитывается из практической потребности в перекладке и перевозке лежачих больных.
Больничные роботы круглосуточно готовы к работе от момента введения в действие до окончания срока эксплуатации. Регламентные и ремонтные работы по обслуживанию больничных роботов могут быть минимизированы оптимизацией конструкции.
Расчетный срок эксплуатации больничного робота составляет шесть-семь лет. Расчетная цена при высокой для производства медоборудования рентабельности порядка 10% составит сумму, эквивалентную нескольким тысячам долларов США, или в десятки раз ниже стоимости известных аналогов. Такое конкурентное преимущество обусловливается применением нового алгоритмического и кинематического решения отделения тела лежачего больного от подложки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| Высокомобильный транспортный робот для перемещения палетированных грузов | 2022 |
|
RU2798652C1 |
| Мобильный робот-помощник | 2021 |
|
RU2810399C2 |
| Робототехнический комплекс для безлюдного возведения строений/укрытий на Луне | 2020 |
|
RU2751836C1 |
| Робот-доставщик на одноосном шасси | 2021 |
|
RU2810208C2 |
| Робототехнический комплекс для обеспечения общественной безопасности | 2020 |
|
RU2757747C1 |
| РОБОТ-САПЕР | 2008 |
|
RU2405122C2 |
| Сельскохозяйственный робот-комбайн | 2019 |
|
RU2728225C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ РОБОТ | 2011 |
|
RU2492620C2 |
| РОБОТ-ОБРЕЗЧИК | 2008 |
|
RU2409931C2 |
Изобретение относится к роботостроению и предназначено для использования в лечебных и санаторных учреждениях, главным образом при перемещении лежачих больных. Технический результат заключается в создании автономного самоходного или не самоходного робототехнического агрегата, способного без непосредственного участия людского персонала в безопасном режиме отделять тело больного от кровати, носилок или от пола, поднимать его, перемещать по лечебному учреждению и укладывать в назначенное место в безопасном режиме без изменения позы. Агрегат для перемещения лежачих больных включает несущую и нагрузочную или нагрузочные конструкции, установленные на самоходном или на несамоходном статически уравновешенном шасси, оснащенной или не оснащенной электронным устройством управления, сенсорной системой на основе компьютерного зрения, навигационной и позиционирующей системами, системой дистанционного управления и блоком интеллектуального принятия решений и выработки управляющих сигналов для приводов агрегата по результатам обработки информации от сенсорной, навигационной и позиционирующей систем и от установленной на устройстве управления компьютерной программы с выполняемой миссией, а на несущей конструкции которого установлены устройства управляемого изменения высоты положения и угла наклона нагрузочной или нагрузочных конструкций, при этом агрегат для перемещения лежачих больных имеет вид установленной или установленных на шасси стойки или стоек с устройствами управляемого изменения высоты положения и угла наклона нагрузочной конструкции, а нагрузочная конструкция имеет вид стола-платформы со страховочными ремнями и вибраторами и с виброходным покрытием в виде эластичного ворса или наклонных параллельных гребней. 4 з.п. ф-лы, 11 ил.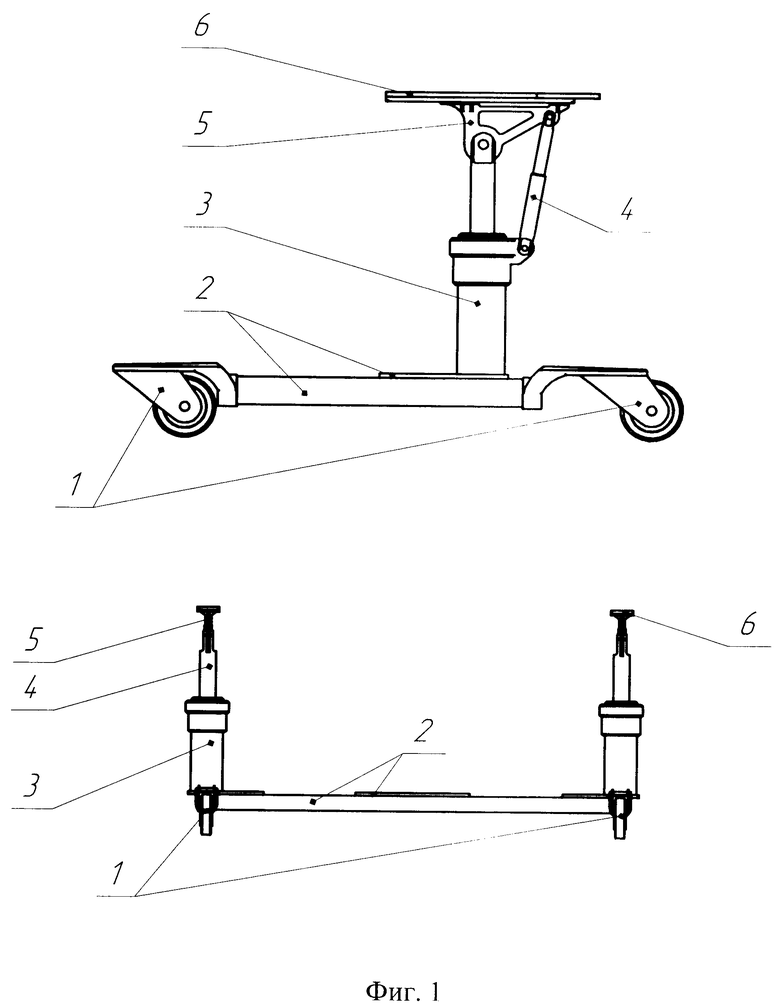
1. Агрегат для перемещения лежачих больных, включающий несущую и нагрузочную или нагрузочные конструкции, установленные на самоходном или на несамоходном статически уравновешенном шасси, оснащенной или не оснащенной электронным устройством управления, сенсорной системой на основе компьютерного зрения, навигационной и позиционирующей системами, системой дистанционного управления и блоком интеллектуального принятия решений и выработки управляющих сигналов для приводов агрегата по результатам обработки информации от сенсорной, навигационной и позиционирующей систем и от установленной на устройстве управления компьютерной программы с выполняемой миссией, а на несущей конструкции которого установлены устройства управляемого изменения высоты положения и угла наклона нагрузочной или нагрузочных конструкций, отличающийся тем, что агрегат для перемещения лежачих больных имеет вид установленной или установленных на шасси стойки или стоек с устройствами управляемого изменения высоты положения и угла наклона нагрузочной конструкции, а нагрузочная конструкция имеет вид стола-платформы со страховочными ремнями и вибраторами и с виброходным покрытием в виде эластичного ворса или наклонных параллельных гребней.
2. Агрегат для перемещения больных по п.1, отличающийся тем, что нагрузочный стол-платформа выполнен двухслойным с несущими перемычками, разделяющими стол-платформу на поперечные сегменты, а поверхности слоев сегментов покрыты полотнами, приведенными шкивами от мотор-редукторов с возможностью управляемого перемещения полотен по поверхности.
3. Агрегат для перемещения больных по п.1, отличающийся тем, что нагрузочный стол-платформа представляет собой цельное твердотельное полотно, приведенное от создающего несимметричные возвратно-поступательные движения вибратора.
4. Агрегат для перемещения больных по п.1, отличающийся тем, что нагрузочный стол-платформа представляет собой сборку из продольных створок, соединенных шарнирами с ограничениями открытия.
5. Агрегат для перемещения больных по п.1, отличающийся тем, что несущая конструкция агрегата представляет собой два рычажно-шарнирных манипулятора с расположенными на оконечностях приведенными шарнирами, выходные звенья которых соединены балкой, на которой установлена нагрузочная конструкция агрегата.
| ПЕРЕДВИЖНАЯ РОБОТИЗИРОВАННАЯ МОДИФИЦИРУЕМАЯ КРОВАТЬ | 2013 |
|
RU2636912C1 |
| EP 0768076 A1, 16.04.1997 | |||
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ ХОДЬБЫ | 2016 |
|
RU2637604C1 |
| US 20150134080 A1, 14.05.2015. | |||

