ти вращения. Редуктор 5 посредством зубчатых колес связан с коробкой 10 скоростей, на выходном валу которой закреплен кривошип 11 с пальцем 12, перемещающимся в пазу кулисы. 13. Посредством оси 25 кулиса 13 шарнирно соединена с рычагом 26,- на котором
1
Изобретение относится к медицинской технике и предназначено для восстановления функций суставов конечностей.
Цель изобретения - обеспечение плавности регулировки в процессе разработки движений.
На чертеже изображена кинематическая схема устройства для разработки движений в суставах конечностей.
Устройство содержит электродвигатель 1, клиноременные передачи 2, двухстороннюю фрикционную муфту 3, состоящую из двух полумуфт 4 - шкивов клиноременных передач, свободно вращающихся на валу двухступенчатого редуктора 5 и фрикционного диска 6, расположенного между полумуфтами 4 с возможностьк) перемещения и оси вала. Муфта 3 снабжена механизмом переключения, которьй содержит рычаг
7переключения, связанный через тягу
8и рычаг 9 с фрикционным диском 6 муфты 3. Механизм переключения муфты обеспечивает перемещение диска 6 по оси вала до соприкосновения с одной из полумуфт 4, в результате чего входной вал редуктора 5 получает две скорости вращения.
Редуктор 5 посредством зубчатых колёс связан с коробкой 10 скоростей на выходном валу которой жестко закреплен кривошип 11 с пальцем 12, перемещающимся в пазу кулисы 13, совершающей качательные движения вокру оси 14, шарнирно установленной в опоре 15, которая выполнена с возможностью перемещения в направляющей 16 благодаря механизму перемещения, который содержит маховик 17, связанньш посредством винтовой зубчатой передачи, включающей винтовые зубчатые Колеса 18 и 19, винтовой пары, содержащей винт 20 и гайку 21, тяги 22
297855
закреплены ролики 27.-Механизм четырехкратного обратного полиспаста, образованный роликами 27 и 28, обеспечивает увеличение перемещения тяги 29. Функциональная шина состоит из рамы 30, подстопника 32, груза 33 и двух телескопических рамок 31. I ил.
рычага 23 с пальцем 24, перемещающим опору 15 с осью 14 качания кулисы 13 и обеспечивающим фиксацию опоры в любом положении.
Кулика 13 посредством оси 25 шар- ( нирно соединена с рычагом 26, на котором закреплены ролики 27, образующие с неподвижными роликами 28 механизм четырехкратного обратного
полиспаста, что обеспечивает четырехкратное увеличение перемещения тяги 29.
Функциональная шина состоит из неподвижной рамы 30 с направляющими,
двух телескопических рамок 31, шарнирно соединенных друг с другом, подстопника 32 и груза 33.
Устройство работает следующим образом.
Больному, находящемуся на кровати, закрепляют ногу на функциональной шине. Тяга 29 пропускается через направляющие ролики 34 и прикрепляется к шине в соответствии с разрабаты
ваемьм суставом.
Ручками на панели управления устанавливают необходимое число циклов, задают скорость и амплитуду колебания.
Амплитуду колебания задают вращением маховика 17. При перемещении опоры 15 с осью 14 качания кулисы 13 происходит бесступенчатое изменение амплитуды колебания рычага 26 с роликами 27 от нуля до максимума. При этом налувое значение достигается при соосном расположении осей 14 и 25. Изменение амплитуды колебания рычага 26 приводит к изменению величины перемещения тягового органа 29, что вызывает соответствующее перемещение рамок 31 шины и, следовательно, сгибание сустава конечности, закреплен
ной в рамках шины, на определенный угол.
После установки заданных параметров включают электродвигатель 1. От электродвигателя 1 через клиноремен- ную передачу 2, фрикционную муфту 3, червячный редуктор 5, зубчатые колеса 18 и 19 вращение передается на входной вал трехскоростной коробки 10 скоростей, от которой через кривошип 11 с пальцем 12 передается ка- чательное относительно оси 1А опоры 15 движение 1 улисе 13, рычагу 26 и подвижным 1роликам 27 полиспаста.
При движении роликов 27 вверх происходит натяжение тяги 29, которая перемещает подвижные рамки 31, производя сгибание сустава.
При движении роликов 27 вниз тяга 29 ослабевает и подвижные рамки 31 под действием веса ноги и груза 33 . возвращаются в исходное положение.
5
0
Формула изобретения
Устройство для разработки движений в суставах конечностей, содержащее шину, гибкую тягу, регулируемый привод с редуктором, отличающееся тем, что, с целью обеспечения плавности регулировки в процессе разработки движений, в него введены кулиса, кривошип с пальцем, перемещающимся в пазу кулисы, шарнир- но установленной в опоре , механизм перемещения опоры, связанный с пальцем опо1н 1, причем кривоват устайов- лен на выходном валу редуктора, с торцом кулисы связана с возможностью скольжения упомянутая тяга, одним концом соединенная с опорой други через две телескопические рамки - с концом шины, которая на другом конце имеет противовес.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для резки глиняного бруса | 1980 |
|
SU903121A1 |
| ПРИБОР ДЛЯ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ МЕХАНИЗМА СОЧЛЕНЕНИЯ ОБУВНЫХ КОЛОДОК | 1970 |
|
SU272626A1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| Радиально-ковочная машина | 1978 |
|
SU729915A1 |
| Радиально-ковочная машина | 1979 |
|
SU804164A1 |
| Рабочий ротор | 1990 |
|
SU1756115A2 |
| Устройство для загрузки транспортных средств сыпучими грузами | 1985 |
|
SU1511167A1 |
| УСТРОЙСТВО ДЛЯ БЕЗОСТАНОВОЧНОЙ ПОПЕРЕЧНОЙ РЕЗКИ ГОФРОКАРТОНА | 2004 |
|
RU2257282C1 |
| Устройство для лова кальмаров | 1972 |
|
SU441901A1 |
| Автомат для разбраковки реле | 1979 |
|
SU866607A1 |
Изобретение относится к медицинской технике. Цель изобретения обеспечение плавности регулировки в процессе разработки движений. Устройство содержит электродвигатель ;1 и клиноременные передачи 2,Двухсторонняя муфта 3 состоит из двух полумуфт 4, Муфта 3 снабжена механизмом, который содержит рычаг 7 переключения. Механизм переключения муфты обеспечивает перемещение диска 6 по оси вала до соприкосновения с одной из полумуфт 4, за счет этого входной вал редуктора 5 получает две скорое(Л 1C ю оо ел СП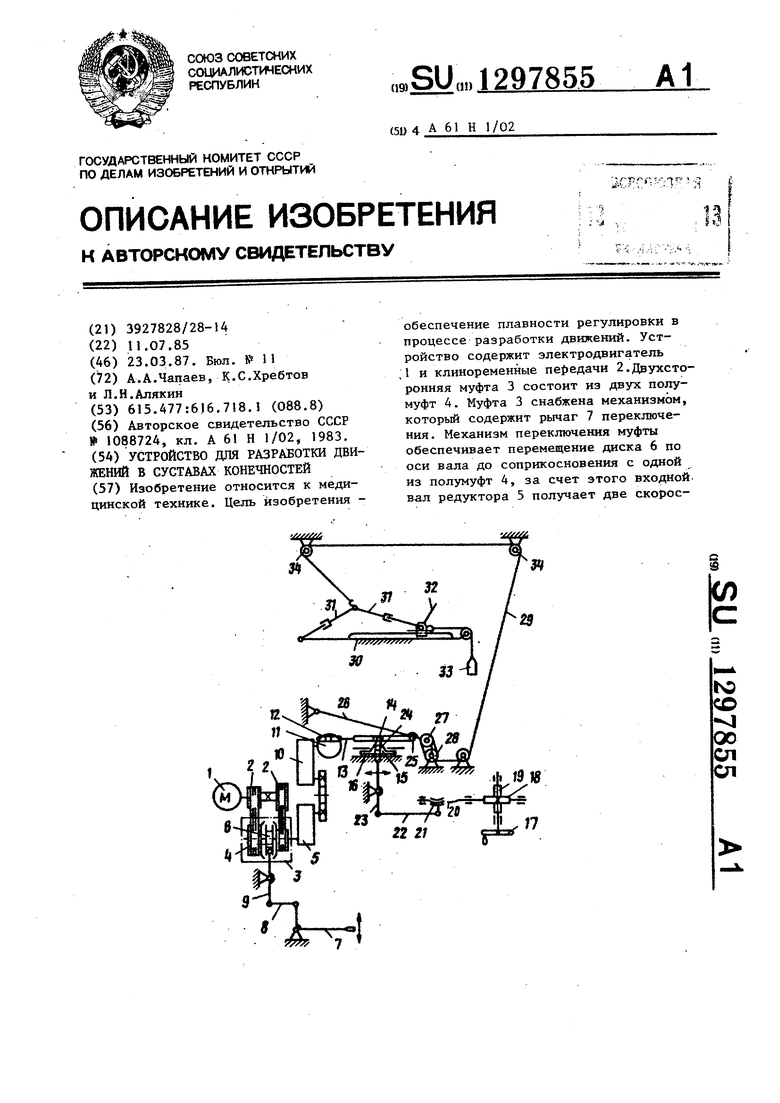
| Устройство для разработки движений в суставах конечностей | 1981 |
|
SU1088724A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
