Изобретение относится к промысловой геофизике и может быть использовано в системах автоматического контроля ориентации отклонителей в буровых скважинах.
Известен датчик углов наклона объектов, содержащий синусно-косинусный трансформаторный преобразователь, статор которого скреплен с объектом, и маятник, укрепленный внутри ротора этого преобразователя.
Датчик обеспечивает высокую точность ориентирования в условиях статики.
Однако, он имеет ряд существенных недостатков. Во-первых, маятник этого датчика имеет большой вес, что снижает надежность устройства в условиях ударных нагрузок. Во-вторых, большой вес маятника вызывает соответственно и большую силу
трения в опорах вращения, тем самым снижается точность установки маятника, а также точность статических измерений углового параметра.
Известен преобразователь инклино- метрический, содержащий корпус, в котором жестко закреплены три взаимноортогональных феррозонда, маятниковый датчик зенитного угла и гравитационный датчик визирного угла Причем, датчик зенитного угла имеет радиальные отверстия, в которых размещены металлические шарики с возможностью свободного перемещения по ответной внутренней поверхности корпуса. Такое техническое решение увеличивает инерционную массу маятника, но поскольку все три шарика связаны одним шарикодержателем. два крайVI VI
оэ
VI
N5
их шарика под действием силы тяжести рижимаются к шарикодержателю и скольят по нему. Возникающие при этом силы прения существенно снижают точность данного устройства.
Наиболее близким по технической сущности к данному изобретению является уст- роЯство для определения зенитного и визирного угла в скважине, содержащее две вза имноперпендикулярные оси вращения, лежащие в плоскости поперечного сечения и совмещенные с осями синусно-косинус- ных трансформаторов, а также два эксцентричных груза, закрепленных на осях вращения посредством легких цилиндрических рамок-поплавков.
Недостатком данного устройства является низкая точность в связи с наличием сухого трения в опорах вращения. Влияние трения выражается в том, что оси вращения и связанные с ними роторы трансформаторов под действием эксцентричных грузов устанавливаются с некоторыми погрешностями ± Д1/ 1,2, величины которых зависят от углов между осями вращения и вектором свободного падения .2- При уменьшении углов ft 1.2 . до 5-3° погрешности возрастают до 5-10°, что обуславливает низкую точность измерения параметров. При этом знак погрешности установки осей вращения носит вероятностный характер, что не позволяет скомпенсировать погрешности каким-либо способом в данном устройстве.
Цель изобретения - повышение точности измерения угла наклона обьектов за счет компенсации трения в опорах.
Указанная цель достигается тем, что известный датчик угла наклона, содержащий корпус, закрепленные в корпусе опоры вращения и установленный в них вал, жестко закрепленный на оси вала эксцентричный груз, выполненный в виде рамки, и преобразователь угла поворота вала, выполненный в виде вращающегося трансформатора, снабжено дополнительным эксцентричным грузом, который закреплен на оси вала с помощью упругой пластинчатой консоли, установленной на рамке, и охватывающей рамку катушкой индуктивности, магнитная ось которой совпадает с общей линией центров масс основного и дополнительного эксцентричных грузов, дополнительный груз выполнен в виде двухполюсного постоянного магнита и установлен внутри рамки, магнитные оси постоянного магнита, катушки индуктивности и ось вала ортогональны, а пластинчатая консоль установлена с возможностью изгиба в плоскости, перпендикулярной оси вала.
В предлагаемом датчике используются два груза, связанные упругой консолью, ри
этом сила взаимодействия магнитного поля постоянного магнита (дополнительного груза) и переменного магнитного поля катушки индуктивности, приводит к относительному колебанию грузов, что исключает влияние
0 сухого трения на точность установки рамки путем замены сухого трения меньшим по величине динамическим трением.
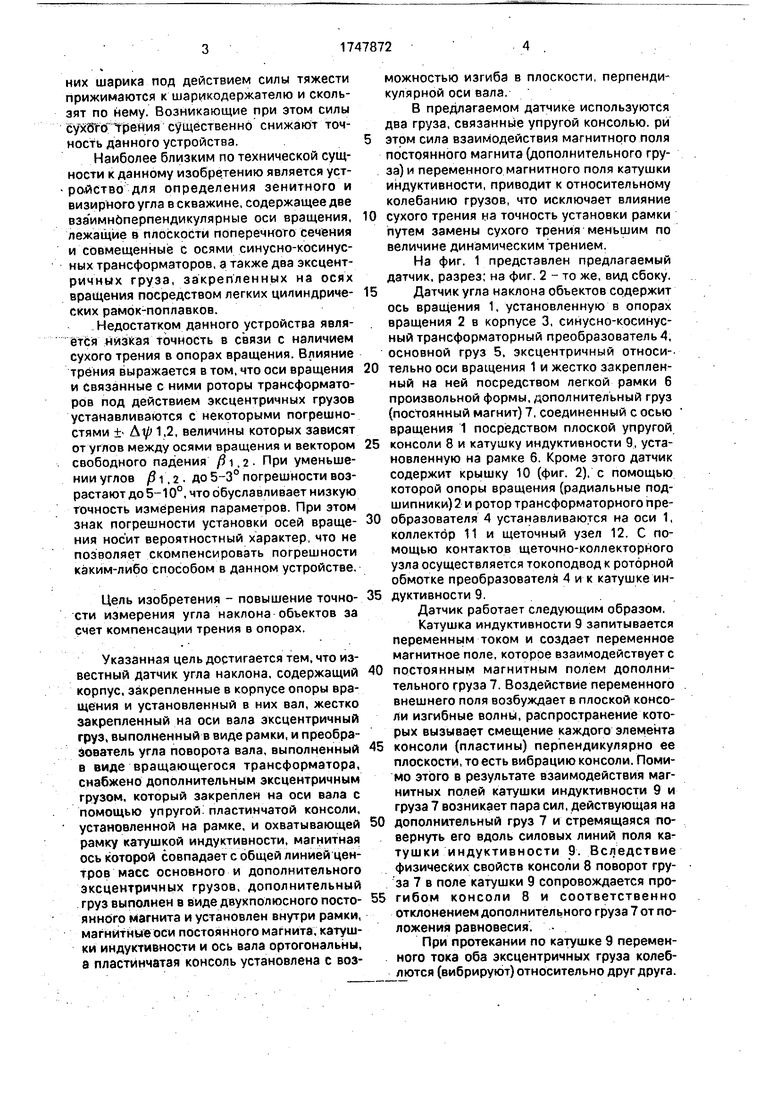
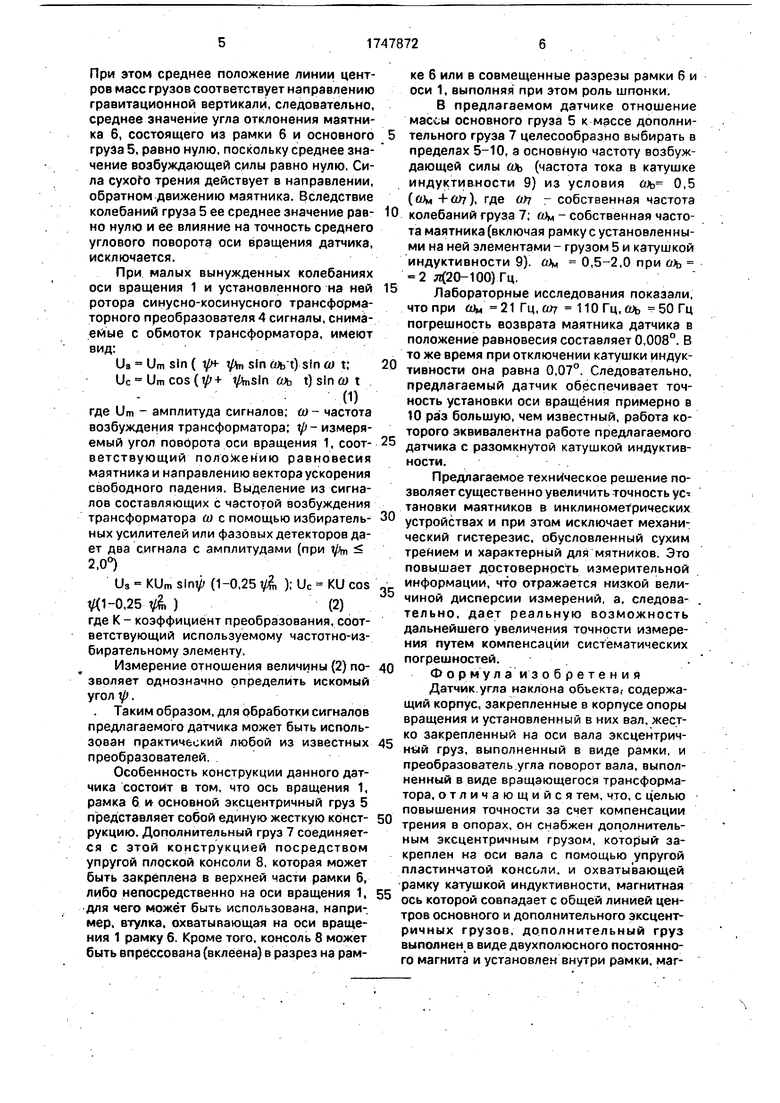
На фиг. 1 представлен предлагаемый датчик, разрез; на фиг. 2 - то же, вид сбоку.
5 Датчик угла наклона объектов содержит ось вращения 1, установленную в опорах вращения 2 в корпусе 3, синусно-косинус- ный трансформаторный преобразователь 4, основной груз 5, эксцентричный относи0 тельно оси вращения 1 и жестко закрепленный на ней посредством легкой рамки 6 произвольной формы, дополнительный груз (постоянный магнит) 7, соединенный с осью вращения 1 посредством плоской упругой
5 консоли 8 и катушку индуктивности 9, установленную на рамке 6. Кроме этого датчик содержит крышку 10 (фиг. 2), с помощью которой опоры вращения (радиальные подшипники) 2 и ротор трансформаторного пре0 образователя 4 устанавливаются на оси 1, коллектор 11 и щеточный узел 12. С помощью контактов щеточно-коллекторного узла осуществляется токоподвод к роторной обмотке преобразователя 4 и к катушке ин5 дуктивности 9.
Датчик работает следующим образом. Катушка индуктивности 9 запитывается переменным током и создает переменное магнитное поле, которое взаимодействует с
0 постоянным магнитным полем дополнительного груза 7. Воздействие переменного внешнего поля возбуждает в плоской консоли изгибные волны, распространение которых вызывает смещение каждого элемента
5 консоли (пластины) перпендикулярно ее плоскости, то есть вибрацию консоли. Помимо этого в результате взаимодействия магнитных полей катушки индуктивности 9 и груза 7 возникает пара сил, действующая на
0 дополнительный груз 7 и стремящаяся повернуть его вдоль силовых линий поля катушки индуктивности 9. Вследствие физических свойств консоли 8 поворот груза 7 в поле катушки 9 сопровождается про5 гибом консоли 8 и соответственно отклонением дополнительного груза 7 от положения равновесия.
При протекании по катушке 9 переменного тока оба эксцентричных груза колеблются (вибрируют) относительно друг друга.
При этом среднее положение линии центров масс грузов соответствует направлению гравитационной вертикали, следовательно, среднее значение угла отклонения маятника 6, состоящего из рамки 6 и основного груза 5, равно нулю, поскольку среднее зна- чение возбуждающей силы равно нулю, Сила сухого трения действует в направлении, обратном движению маятника. Вследствие колебаний груза 5 ее среднее значение рав- но нулю и ее влияние на точность среднего углового поворота оси вращения датчика, исключается.
При малых вынужденных колебаниях оси вращения 1 и установленного на ней ротора синусно-косинусного трансформаторного преобразователя 4 сигналы, снимаемые с обмоток трансформатора, имеют вид:
Us Um sin ( V sln и) sfn y t;
Uc Um COS(V + VbSln CDb t) Sin (I) t
(1)
где Um амплитуда сигналов; ft) - частота возбуждения трансформатора; 1р- измеряемый угол поворота оси вращения 1, соот- ветствующий положению равновесия маятника и направлению вектора ускорения свободного падения. Выделение из сигналов составляющих с частотой возбуждения трансформатора ш с помощью избиратель- ных усилителей или фазовых детекторов дает два сигнала с амплитудами (при ipm 2,0°)
иа - KUm sinv (1-0,25 v& ); uc ки cos
VO-0,25 V& )(2)
где К- коэффициент преобразования, соответствующий используемому частотно-избирательному элементу.
Измерение отношения величины (2) по- зволяет однозначно определить искомый угол .
. Таким образом, для обработки сигналов предлагаемого датчика может быть использован практический любой из известных преобразователей.
Особенность конструкции данного датчика состоит в том, что ось вращения 1, рамка 6 и основной эксцентричный груз 5 представляет собой единую жесткую конст- рукцию. Дополнительный груз 7 соединяется с этой конструкцией посредством упругой плоской консоли 8, которая может быть закреплена в верхней части рамки 6, либо непосредственно на оси вращения 1, для чего может быть использована, например, втулка, охватывающая на оси вращения 1 рамку 6. Кроме того, консоль 8 может быть впрессована (вклеена) в разрез на рамке 6 или в совмещенные разрезы рамки б и оси 1, выполняя при этом роль шпонки.
В предлагаемом датчике отношение массы основного груза 5 к массе дополнительного груза 7 целесообразно выбирать в пределах 5-10, а основную частоту возбуждающей силы ft) (частота тока в катушке индуктивности 9) из условия uJb 0,5 (), где on собственная частота колебаний груза 7; УМ - собственная частота маятника (включая рамку с установленными на ней элементами - грузом 5 и катушкой индуктивности 9). 0,5-2,0 при а)ь 2 л(20-100)Гц.
Лабораторные исследования показали, что при бОм 21 Гц, аъ ИОГц.сиь 50 Гц погрешность возврата маятника датчика в положение равновесия составляет 0,008°. В тоже время при отключении катушки индуктивности она равна 0,07°. Следовательно, предлагаемый датчик обеспечивает точность установки оси вращения примерно в 10 раз большую, чем известный, работа которого эквивалентна работе предлагаемого датчика с разомкнутой катушкой индуктивности.
Предлагаемое техническое решение позволяет существенно увеличить точность установки маятников в инклинометрических устройствах и при этом исключает механический гистерезис, обусловленный сухим трением и характерный для мятников. Это повышает достоверность измерительной информации, что отражается низкой величиной дисперсии измерений, а, следова- тельно, дает реальную возможность дальнейшего увеличения точности измерения путем компенсации систематических погрешностей.
Формула изобретения
Датчик угла наклона объекта; содержащий корпус, закрепленные в корпусе опоры вращения и установленный в них взл, жестко закрепленный на оси вала эксцентричный груз, выполненный в виде рамки, и преобразователь угла поворот вала, выполненный в виде вращающегося трансформатора, отличающийся тем, что, с целью повышения точности за счет компенсации трения в опорах, он снабжен дополнительным эксцентричным грузом, который закреплен на оси вала с помощью упругой пластинчатой консоли, и охватывающей рамку катушкой индуктивности, магнитная ось которой совпадает с общей линией центров основного и дополнительного эксцент- ричных грузов, дополнительный груз выполнен в виде двухполюсного постоянного магнита и установлен внутри рамки, магА
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения искривления скважины | 1979 |
|
SU866149A1 |
| Преобразователь зенитного угла | 1981 |
|
SU1008431A1 |
| Устройство для измерения зенитного угла искривления скважины | 2018 |
|
RU2692365C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗЕНИТНОГО УГЛА СКВАЖИННОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2252313C2 |
| БЛОК ПЕРВИЧНЫХ ПРЕОБРАЗОВАТЕЛЕЙ СКВАЖИННОГО МАГНИТОМЕТРА-ИНКЛИНОМЕТРА | 1992 |
|
RU2063052C1 |
| Преобразователь зенитного угла | 1987 |
|
SU1435769A1 |
| БЛОК ПЕРВИЧНЫХ ПРЕОБРАЗОВАТЕЛЕЙ СКВАЖИННОГО МАГНИТОМЕТРА-ИНКЛИНОМЕТРА | 1992 |
|
RU2065184C1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
Изобретение относится к измерительной технике, может быть использовано в промысловой геофизике для контроля ориентации отклонителей в буровых скважинах и имеет целью повышение точности датчика угла наклона объекта за счет компенсации трения в опорах. Датчик содержит ось 1 вращения и закрепленную на ней рамку 6, охваченную катушкой 9 индуктивности и несущую эксцентричный груз 5. Поворот рамки 6 измеряется с помощью вращающегося трансформатора 4. На упругой консоли 8 установлен дополнительный груз 7, выполненный в виде постоянного магнита и размещенный внутри рамки 6. При подключении катушки 9 индуктивности к источнику переменного напряжения в ней наводитсямагнитноеполе, взаимодействующее с постоянным магнитом и приводящее к относительному перемещению грузов 5 и 7. Это вызывает колебание оси вращения 1 относительно положения статического равновесия и компенсирует влияние сухого трения на точность измерения. 2 ил. (Л С
Фиг. 2
фиг.1
Ю
| Датчик углов наклона объекта | 1979 |
|
SU832335A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь инклинометрический | 1984 |
|
SU1218089A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для определения зенитного и визирного угла в скважине | 1980 |
|
SU933968A1 |
| кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
