ON
СП
ел о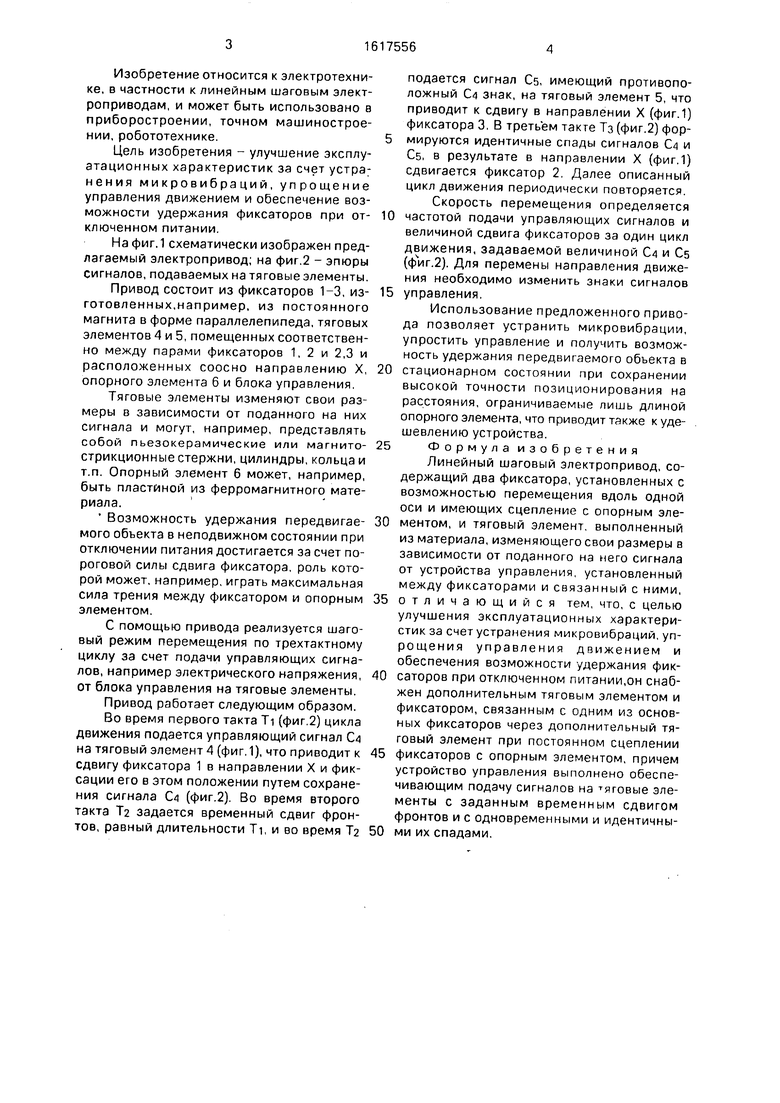
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2168836C1 |
| Устройство для обнаружения отказов в шаговом электроприводе | 1989 |
|
SU1640811A1 |
| ДВУХРЕЖИМНЫЙ ДОИЛЬНЫЙ АППАРАТ | 2010 |
|
RU2440716C2 |
| Самоустанавливающаяся головка робота | 1984 |
|
SU1274902A1 |
| Распределитель импульсов для управления трехфазным шаговым двигателем | 1990 |
|
SU1705998A1 |
| Линейный шаговый электродвигатель | 1988 |
|
SU1658314A1 |
| Устройство для загрузки изделий, преимущественно оснований корпусов интегральных схем, в кассеты | 1989 |
|
SU1762431A1 |
| Устройство для программного управления скоростью шагового электропривода | 1983 |
|
SU1137444A1 |
| Устройство для обнаружения отказов в шаговом электроприводе | 1988 |
|
SU1511843A1 |
| ДВУХРЕЖИМНЫЙ ДОИЛЬНЫЙ АППАРАТ | 2004 |
|
RU2269889C1 |

Изобретение относится к электротехнике, к линейным шаговым электроприводам, и может быть использовано в приборостроении, точном машиностроении, робототехнике. Цель изобретения - улучшение эксплуатационных характеристик за счет устранения микровибраций, упрощения управления движением и обеспечения возможности удержания фиксаторов при отключенном питании. Привод состоит из фиксаторов 1, 2, 3, например постоянных магнитов, тяговых элементов 4, 5, опорного элемента 6, например ферромагнитной пластины, и блока управления. Тяговые элементы изменяют свои размеры в зависимости от поданного на них сигнала и могут быть, например пьезокерамическими. С помощью привода реализуется шаговый режим перемещения по трехтактному циклу путем подачи управляющих сигналов от блока управления на тяговые элементы. Использование привода позволяет устранить микровибрации, упростить управление и получить возможность удержания передвигаемого объекта в станционарном состоянии при сохранении высокой точности позиционирования на расстояния, ограничиваемые лишь длиной опорного элемента, что приводит также к удешевлению устройства. 2 ил.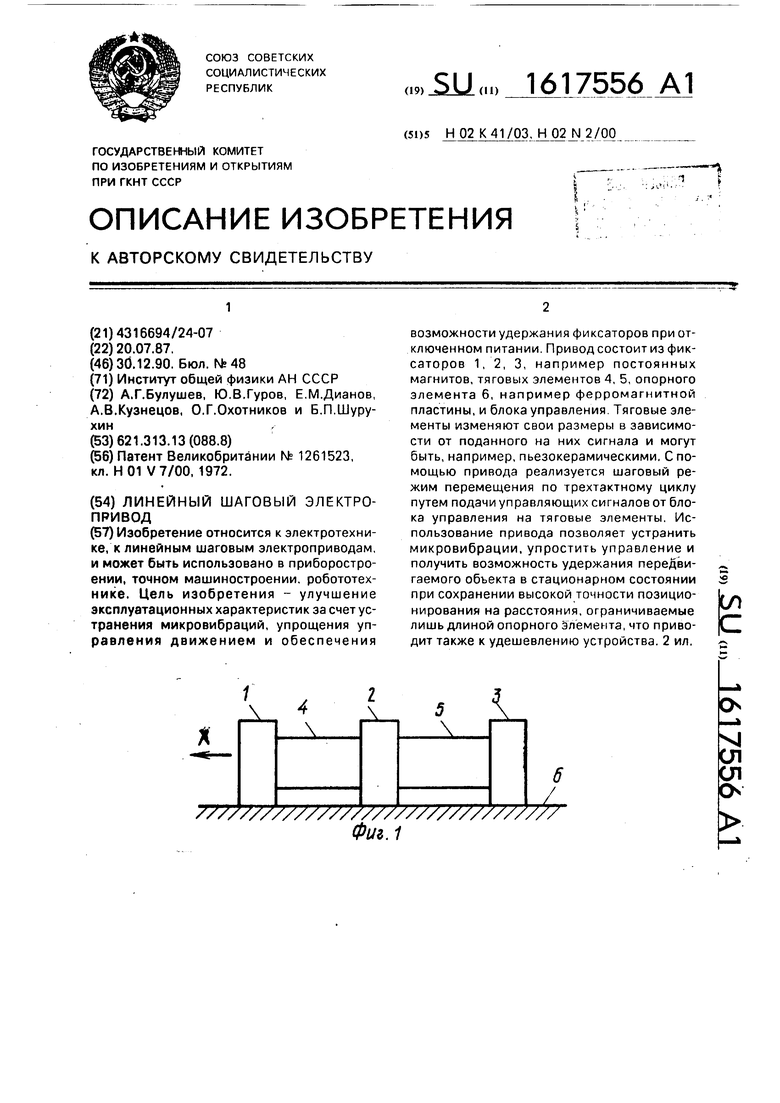
Фиг.1
Изобретение относится к электротехнике, в частности к линейным шаговым электроприводам, и может быть использовано в приборостроении, точном машиностроении, робототехнике.
Цель изобретения - улучшение эксплуатационных характеристик за счет устранения микровибраций, упрощение управления движением и обеспечение возможности удержания фиксаторов при отключенном питании.
На фиг. 1 схематически изображен предлагаемый электропривод; на фиг.2 - эпюры сигналов, подаваемых на тяговые элементы. Привод состоит из фиксаторов 1-3, изготовленных,например, из постоянного магнита в форме параллелепипеда, тяговых элементов 4 и 5, помещенных соответственно между парами фиксаторов 1, 2 и 2,3 и расположенных соосно направлению X, опорного элемента 6 и блока управления.
Тяговые элементы изменяют свои размеры в зависимости от поданного на них сигнала и могут, например, представлять собой пьезокерамические или магнито- стрикционные стержни, цилиндры, кольца и т.п. Опорный элемент 6 может, например, быть пластиной из ферромагнитного материала.
Возможность удержания передвигаемого объекта в неподвижном состоянии при отключении питания достигается за счет пороговой силы сдвига фиксатора, роль которой может, например, играть максимальная сила трения между фиксатором и опорным элементом.
С помощью привода реализуется шаговый режим перемещения по трехтактному циклу за счет подачи управляющих сигналов, например электрического напряжения, от блока управления на тяговые элементы. Привод работает следующим образом. Во время первого такта Ti (фиг.2) цикла движения подается управляющий сигнал С4 на тяговый элемент 4 (фиг. 1), что приводит к сдвигу фиксатора 1 в направлении X и фиксации его в этом положении путем сохранения сигнала С (фиг.2). Во время второго такта Т2 задается временный сдвиг фронтов, равный длительности Ti, и во время Т2
подается сигнал Cs, имеющий противоположный СА знак, на тяговый элемент 5, что приводит к сдвигу в направлении X (фиг.1) фиксатора 3. В третьем такте Тз (фиг.2) фор5 мируются идентичные спады сигналов С и СБ, в результате в направлении X (фиг.1) сдвигается фиксатор 2. Далее описанный цикл движения периодически повторяется. Скорость перемещения определяется
10 частотой подачи управляющих сигналов и величиной сдвига фиксаторов за один цикл движения, задаваемой величиной СА и Cs (фиг.2). Для перемены направления движения необходимо изменить знаки сигналов
15 управления.
Использование предложенного привода позволяет устранить микровибрации, упростить управление и получить возможность удержания передвигаемого обьекта в 20 стационарном состоянии при сохранении высокой точности позиционирования на расстояния, ограничиваемые лишь длиной опорного элемента, что приводит также к удешевлению устройства. 25Формула изобретения
Линейный шаговый электропривод, содержащий два фиксатора, установленных с возможностью перемещения вдоль одной оси и имеющих сцепление с опорным эле- 30 ментом, и тяговый элемент, выполненный из материала, изменяющего свои размеры в зависимости от поданного на него сигнала от устройства управления, установленный между фиксаторами и связанный с ними, 35 отличающийся тем, что, с целью улучшения эксплуатационных характеристик за счет устранения микровибраций,уп- рощения управления движением и обеспечения возможности удержания фик- 0 саторов при отключенном питании,он снабжен дополнительным тяговым элементом и фиксатором, связанным с одним из основных фиксаторов через дополнительный тяговый элемент при постоянном сцеплении 5 фиксаторов с опорным элементом, причем устройство управления выполнено обеспечивающим подачу сигналов на яговые элементы с заданным временным сдвигом фронтов и с одновременными и идентичны- 0 ми их спадами.
Ti
.2
о
| Патент Великобритании № 1261523, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
