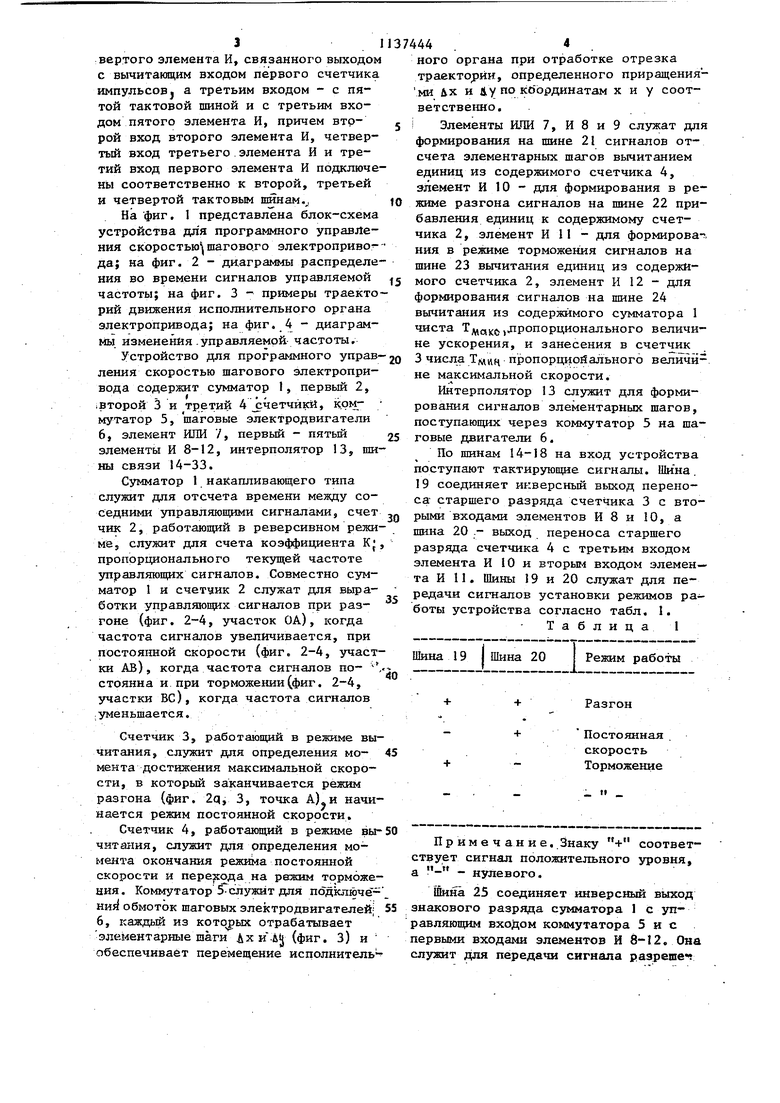
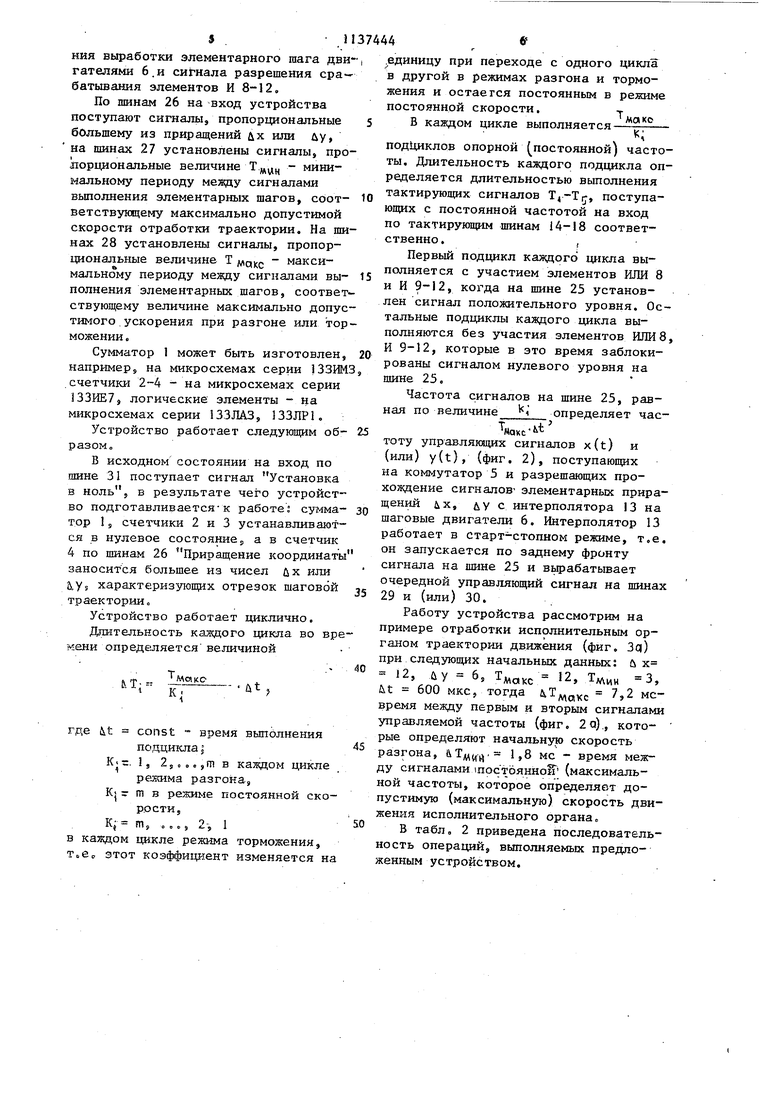
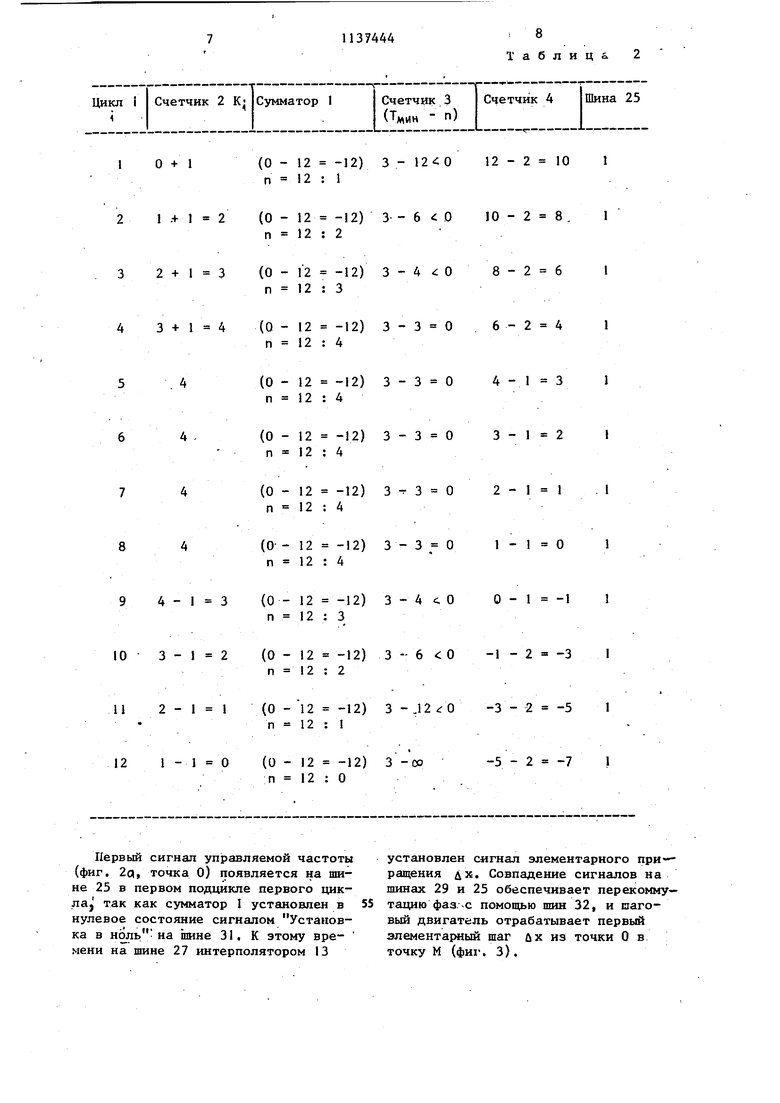
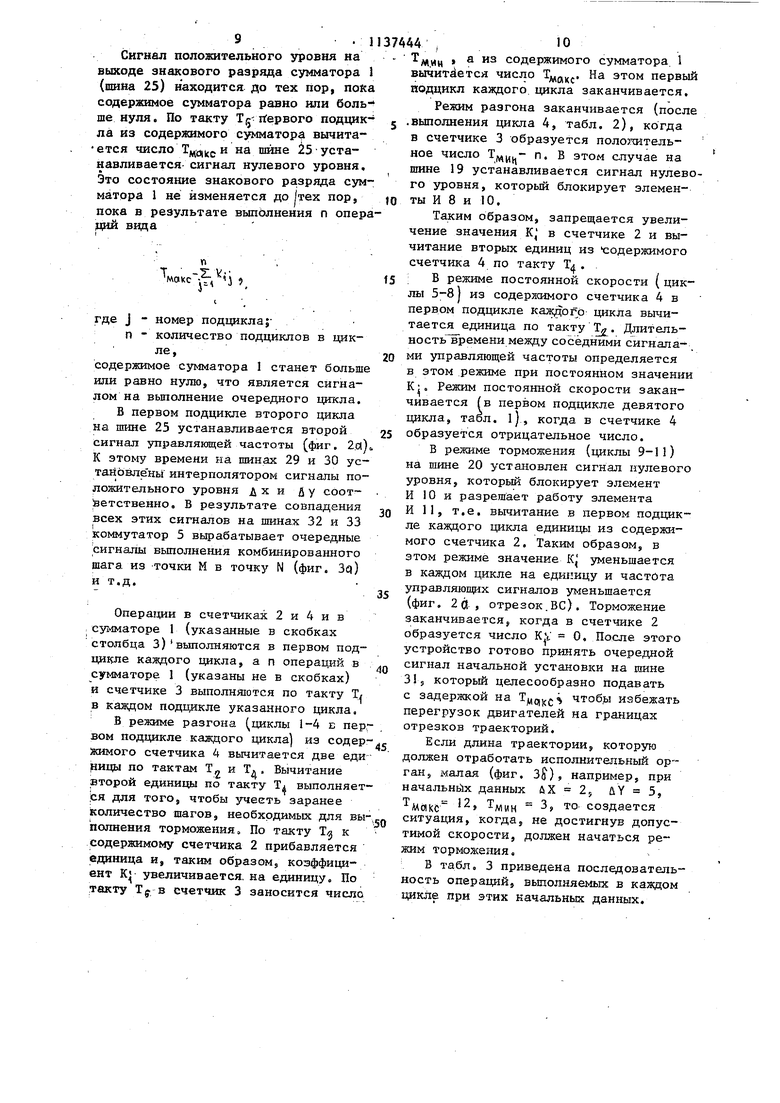
Изобретение относится к автоматике и электротехнике и предназначено для использования в системах числового программного управления, в кото рых изменение скорости движения исполнительного органа, например, пишущего узла чертежно-графического автомата, осуществляется регулированием частоты управляющих сигналов интерполятора, каждому из которых со ответствует изменение координаты исполнительного органа на элементарный шаг. Известно устройство для регулирования Частоты, предназначенное для управления позиционированием посредством -дискретного электропривода, содержащее два счетчика, три делителя частоты, коммутатор, задатчик ускорения, вентиль и генератор опбрных импульсов. Регулирование частоты эти устройством осуществляется изменением ширины пачек импульсов ij , Недостатком этого устройства является то, что оно не обеспечивает расчет длины участков разгона, посто янной скорости, торможения и оперативное изменение величины ускорения и замедления, так как в нем величина ускорения и замедления привода может устанавливаться различной путем пере стройки 8 делителя. Это затрудняет использование устройства там, где требуется оперативно изменять величи ну ускорения и замедления в зависи мости от нагрузки привода, например в зависимости от холостого хода, ког да разгон и торможение должны выполняться с большим ускорением, и от рабочего хода под нагрузкой, когда ускорение должно быть уменьшено. Наиболее близким по технической сущности к предлагаемому устройству является приводное устройство импульсного двигателя, содержащее счет чики импульсов, интерполятор, подклю ченный выходами к информационным вхо дам коммутатора, связанного выходами с фазовыми входами шагового электропривода, элементы И, ИЛИ 2. Недостатком этого устройства явля ется отсутствие самонастройки на режимы работы. Кроме того, регулирование скорости при разгоне и торможении вы полняется устройством по параболичес кому закону, в результате чего имеют место переменные ускорения, отрицательно влияющие на механизм привода .Программа ускорения и замедления жесткая и реализована на .вентильных схемах, что существенно затрудняет использование устройства там, где нагрузка привода меняется и требуется оперативное изменение режима регулирования. Цель изобретения - расширение области применения устройства за счет возможности управления режимами работы электропривода. Поставленная цель достигается тем, что в устройство для программного управления скоростью шагового электропривода, содержащее первый и второй счетчики импульсов, интерполятор, подключенный выходами к информационным входам коммута:тора, связанного выходами с фазовыми входами шагового электропривода, элемент ИЛИ, соединенный с выходами первого и второго эле--1 тентов И, третий, четвертый и пятый элементы И, введены третий счетчик импульсов, первая, вторая, третья, четвертая и пятая тактовые шины и сумматор, подключенный выходом знакового разряда к управляющему входу коммутатора и к первым входам первого, второго, третьего, четвертого и пятого элементов И, первым информационным входом -.к шине Ускорение, вторым информационным входом - к выходу первого счетчика импульсов, первым управляющим входом - к выходу пятого элемента И и к управлякяцему входу второго счетчика импульсов, а вторым управляющим входом - к первой тактовой шине и к счетному входу второго счетчика импульсов, соединенного установочным входом с шиной Максимальная скорость, а выходом переноса старшего разряда - с вторым входом первого элемента И и со вторым входом третьего элемента И, подключенного вьпсодом к суммирующему входу первого счетчика импульсов, связанного сбросовым входом с установочным входом сумматора, со сбросовым входом второго счетчика импульсов, с шиной Установка в ноль, с вторым входом пятого элемента И и со сбросовым входом третьего счетчика импульсов , подключенного счетным входом к выходу элемента ИЛИ, установочHbJM входом - к шине Прирал(ение. координаты, а выходы переноса старшего разряда - к третьему -третье, го элемента И и к второму входу чет3. вертого элемента И, связанного выходом с вычитающим входом первого счетчика импульсовJ а третьим входом - с пятой тактовой шиной и с третьим входом пятого элемента И, причем второй вход второго элемента И, четвертый вход третьего.элемента И и третий вход первого элемента И подключе ны соответственно к второй, третьей и четвертой тактовым шинам,, На фиг. 1 представлена блок-схема устройства для программного управления скоростью шагового электроприво: да; на фиг. 2 - диаграммы распределе ния во времени сигналов управляемой частоты; на фиг. 3 - примеры траекто рий движения исполнительного органа электропривода; на фиг. 4 - диаграммы изменения.управляемрй частоты. Устройство для программного управ- ления скоростью шагового электропривода содержит сумматор I, первый 2, второй 3 и третий 4 учетчики, коммутатор 5, шаговые электродвигатели 6, элемент ИЛИ 7, первый - пятый элементы И 8-12, интерполятор 13, ши ны связи 14-33. Сумматор 1 накапливающего типа служит для отсчета времени между соседними управляющими сигналами, счет чик 2, работающий в реверсивном режи ме, служит для счета коэффициента Kj пропорционального текущей частоте Зшравляющих сигналов. Совместно сумматор 1 и счетчик 2 служат для выработки управляющих сигналов при разгоне (фиг. 2-4, участок ОА), когда частота сигналов увеличивается, при постоянной скорости (фиг. 2-4, участ ки АВ), когда частота сигналов постоянна и при торможении(фиг. 2-4, участки ВС), когда частота сигналов ;уменьшается. . Счетчик 3, работающий в режиме вычитания, служит для определения момента достижения максимальной скорости, в которьй заканчивается режим разгона (фиг. 2q, 3, точка А) и начинается режим постоянной скорости. Счетчик 4, работающий в режиме вычитания, служит для определения момента окончания режима постоянной скорости и перехода на режим торможения. Коммутатор 5-служит для пбдключё ни5 обмоток шаговых электродвигателей 6, каждый из которых отрабатывает элементарные шаги Лхи.й (фиг. 3) и обеспечивает перемещение исполнитель 44 .4 ного органа при отработке отрезка траектории, определенного приращениями &х и АУ по координатам хну соответственно. i Элементы ИЛИ 7, И 8 и 9 служат для формирования на шине 21 сигналов отсчета элементарных шагов вычитанием единиц из содержимого счетчика 4, элемент И 10 - для формирования в режиме разгона сигналов на шине 22 прибавления единиц к содержимому счетчика 2, элемент И 11 - для формирова-. ния в режиме торможения сигналов на шине 23 вычитания ед1шиц из содержймого счетчика 2, элемент И 12 - для формирования сигналов на шине 24 вычитания из содержимого сумматора 1 чиста Т;у,я(ч,лропорционального величине ускорения, и занесения в счетчик 3 числа пр°порццойального величине максимальной скорости. Интерполятор 13 служит для формирования сигналов элементарных шагов, поступающих через коммутатор 5 на шаговые двигатели 6. По шинам 14-18 на вход устройства поступают тактирующие сигналы. Шина. 19 соединяет инверсный выход переноса старшего разряда счетчика 3 с вторыми входами элементов И 8 и 10, а шина 20 -- выход переноса старшего разряда счетчика 4 с третьим входом элемента И 10 и вторым входом элемента И П. Шины 19 и 20 служат для передачи сигналов установки режимов работы устройства согласно табл. 1. Таблица 1 Шина 19 Шина 20 Режим работы Разгон Постоянная скорость Торможение Пр им е ч ан и е. Знаку + соответствует сигнал положительного уровня. нулевого. Шина 25 соединяет инверсный выход знакового разряда сумматора 1 с управляющим входом коммутатора 5 и с первыми входами элементов И 8-12. Она служит для передачи сигнала разреше ; 5 .П ния выработки элементарного шага дви гателями 6.и сигнала разрешения ера- батьшания элементов И 8-12. По шинам 26 на вход устройства поступают сигналы, пропорциональные большему из приращений х или йу, на шинах 27 установлены сигналы, про дорциональные величине Т.цц - минимальному периоду между сигналами выполнения элементарных шагов, соответствующему максимально допустимой скорости отработки траектории. На ши нах 28 установлены сигналы, пропорциональные величине Т аис максимальному периоду между сигналами выполнения элементарных шагов, соответ ствующему величине максимально допус тимого . ускорения при разгоне или тор можении . Сумматор 1 может быть изготовлен, например, на микросхемах серии jSSHM счетчики 2-4 - на микросхемах серии 133ИЕ7, логические элементы - на микросхемах серии 133ЛАЗ, 133ЛР1. Устройство работает следующим образом, В исходном состоянии на вход по шине 31 поступает сигнал Установка в ноль, в результате чего устройство подготавливается-к работе; сумматор S счетчики 2 и 3 устанавливаются в нулевое состояние, а в счетчик 4 по шинам 26 Приращение координаты заносится большее из чисел их или характеризующих отрезок шаговой траектории. Устройство работает циклично, Длительность каждого цикла во вре мени определяется величиной Mi iгде it const время вьшолнения подциклаI 2,...,m в каждом цикле К-. 1, режима разгона, в режиме постоянной скорости, Kj m. .8-,1 В каждом цикле режима торможения, Тое этот коэффициент изменяется на 4 .единицу при переходе с одного цикла в другой в режимах разгона и торможения и остается постоянным в режиме постоянной скорости. -|В каждом цикле выполняетсяподДиклов опорной постоянной) частоты. Длительность каждого подцикла определяется длительностью выполнения „, тактирующих сигналов Tj-Tr. поступаi- «5 ° ющих с постоянной частотой на вход по тактирующим шинам 14-18 соответственно ., Первый подцикл калздого цикла выполняется с участием элементов ИЛИ 8 и И 9-12, когда на шине 25 установлен сигнал положительного уровня. Остальные подциклы каждого цикла выполняются без участия элементов ИЛИ 8, И 9-12, которые в это время заблокированы сигналом нулевого уровня на шине 25. Частота сигналов на шине 25, равная по величине определяет частоту управляющих сигналов x(t) и (или) y(t), (фиг. 2), поступающих на коммутатор 5 и разрешающих прохождение сигналов элементарных приращений их, &У с интерполятора 13 на шаговые двигатели 6. Интерполятор 13 работает в старт-стопном режиме, т.е. он запускается по заднему фронту сигнала на шине 25 и вьфабатывает очередной управляющий сигнал на шинах 29 и (или) 30. Работу устройства рассмотрим на примере отработки исполнительным органом траектории движения (фиг. Зо|) при следующих начальных данных: и х -12, йу 6, T,oj,(. 12, Тддин 3, bt 600 МКС, тогда 7,2 мсвремя между первым и вторым сигналами управляемой частоты (фиг. 2а)., которые определяют начальную скорость разгона, йТд,.-- 1,8 мс - время между сигналами шостоянной (максимальной частоты, которое определяет допустимую (максимальную) скорость движения исполнительного органа. В табл. 2 приведена последовательность операций, выполняемых предложенным устройством. (О - 12 -12) 3 - 1 0+1 п 12 : 1 2 .+ 1 2 (О ) 3 п 12 :2 32+1 3 (О -12 -12) 3 п 12 :3 43+1 4 (О -12 -12) 3п 12 :4 54(О -12 -12) 3п 12 :4
(О - 12 -12) 3-3 0
4 . п 12 : 4
(О - 12 -12) 0 п 12 : 4
(О - 12 -12) п 12 : 4
9 (О - 12 -12) 3-4 О
п 12 : 3
10 (О - 12 -12) 3-6 О
п 12 : 2
П 2-1 1(О - l2 -12) 3 - J2 0
п 12 : 1
12 (О - 12 -12) 3 -00
п 12 : О
2-1 1I
О - 1 -11
-I - 2 -3 1
-3 - 2 -5 1
-5 - 2 -7 1 12 - 2 10 1 6 О 10-2 8. 1 4 О8-2 61 3 06-2 41 3 04-1 31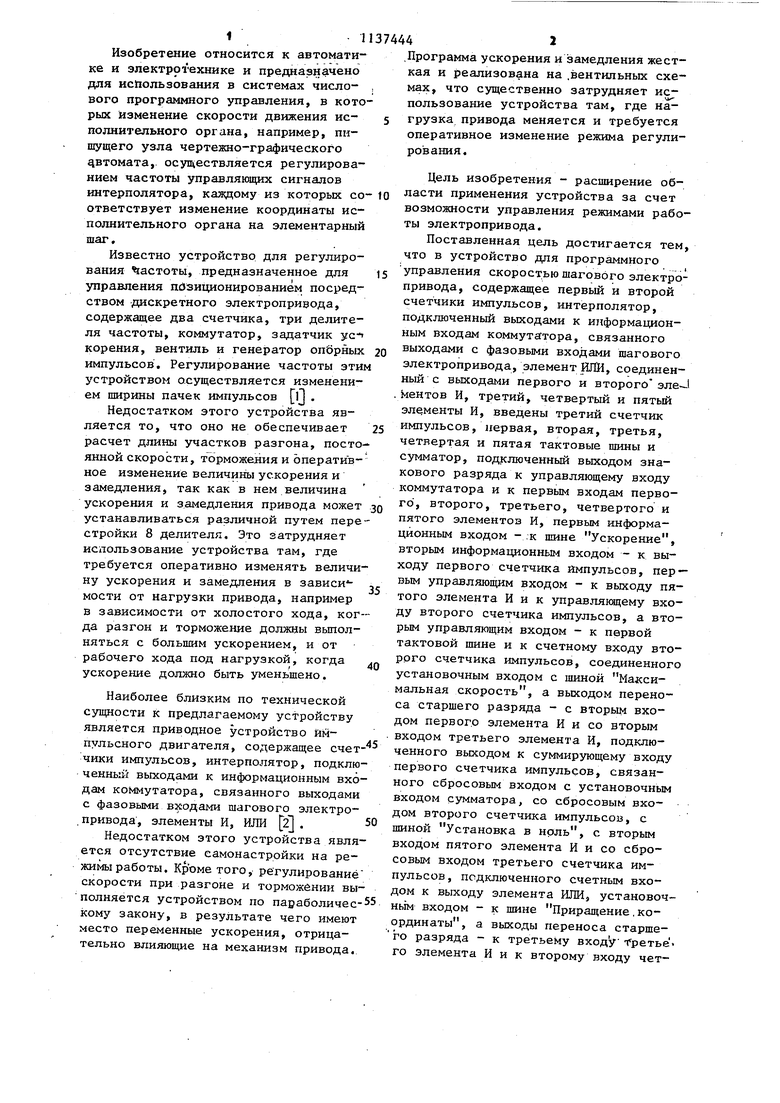
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Трехкоординатный линейный интерполятор | 1982 |
|
SU1037214A1 |
| Устройство для формирования шаговых траекторий | 1979 |
|
SU930262A1 |
| Многоканальное устройство для программного управления | 1978 |
|
SU748431A1 |
| Интерполятор | 1978 |
|
SU798729A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Устройство для программного управления скоростью шагового электропривода | 1988 |
|
SU1517007A1 |
| Устройство для программного управления | 1978 |
|
SU734617A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1381682A1 |
| Устройство для программногоупРАВлЕНия МНОгОКООРдиНАТНыММАНипуляТОРОМ | 1977 |
|
SU819794A1 |
УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ШАГОВОГО ЭЛЕКТ- . РОПРИВОДА, содержащее первый и второй счетчики импульсов, интерполятор, подключенный выходами к информационным входам коммутатора,.связанного выходами с фазовыми входами шагового электропривода, элемент ИЛИ, соединенный с выходами первого и второго элементов И, третий, четвертый, пятый элементы И, о т л и ч а ю щ е е с я тем, что, с целью расширения области применения устройства за счет возможности управления режимами работы элек-; тропривода, в него введены третий счетчик импульсов, первая, вторая, третья, четвертая и пятая тактовые шины и сумматор, подключенный выходом знакового разряда к управляющему входу коммутатора и к первым входам первого, второго, третьего, четвертого и пятого элементов И, первым информационным входом - к шине Ускорение, вторым информационным входом к выходу первого счетчика импульсов, первым управлянядим входом - к выходу пятого элемента Ник управляющему входу второго счетчика импульсов, а вторым управлякяцим входом - к первой тактовой шине и к счетному входу второго счетчика импульсов, соединенного установочным входом с шиной Максимальная скорость, а выходом переноса старшего разряда - с вторым входом первого элемента И и с вторым входом третьего элемента И, подключенного выходом к суммирующему входу первого счетчика импульсов, связанного сбросо вым входом с установочным входом сумматора, со сбросовым входом второго § счетчика импульсов, с шиной Установка в ноль, со вторым входом пятого элемента И и со сбросовым входом третьего счетчика импульсов, подключенного счетным входом к выходу элемента ИЛИ, установочным входом - к шине Приращение координаты, а выходы переноса старшего разряда - к третьему входу третьего элемента И и к второму входу четвертого элемента И, связан&0 ного выходом с вычитающим входом первого счетчика импульсов, а третьим 4 входом - с пятой тактовой шиной и 4ih с третьим входом пятого элемента И, причем второй вход второго элемента И, четвертый вход третьего элемента И и третий вход первого элемента И подключены соответственно к второй, третьей и четвертой тактовым шинам.
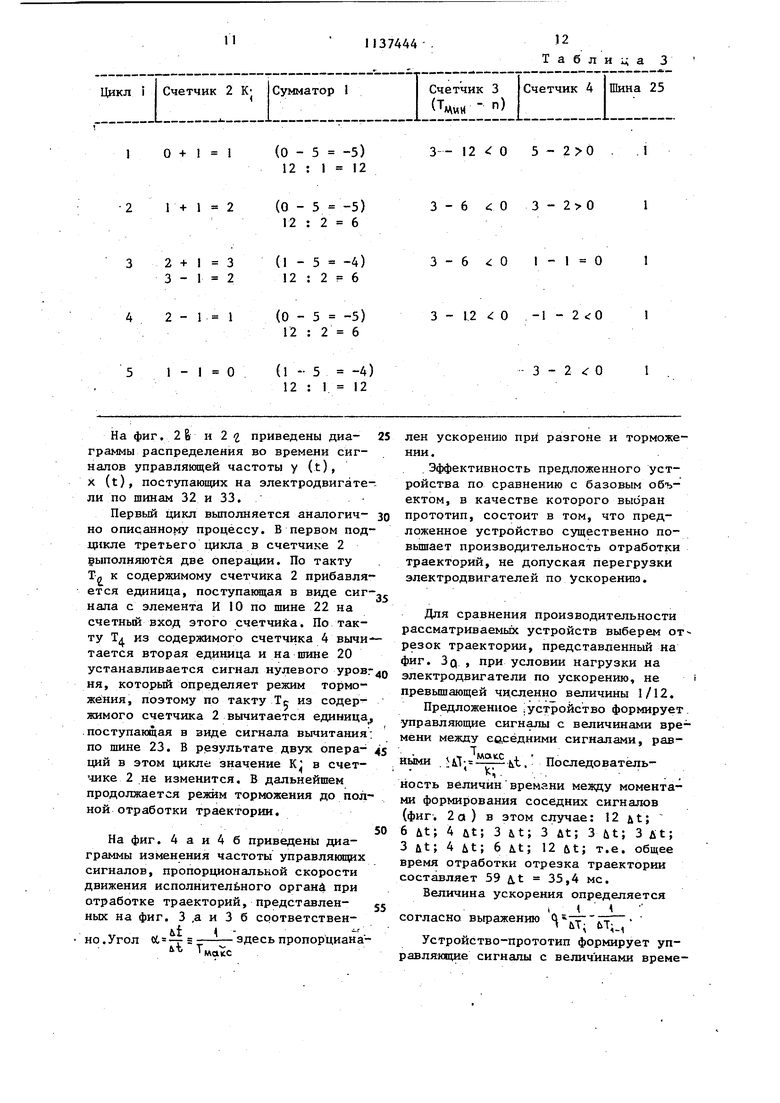
Первый сигнал управляемой частоты (фиг. 2а, точка 0) появляется на шине 25 в первом нодцикле первого цикла, так как сумматор 1 установлен в нулевое состояние сигналом Установка в пшне 31, К этому времени на шине 27 интерполятором 13
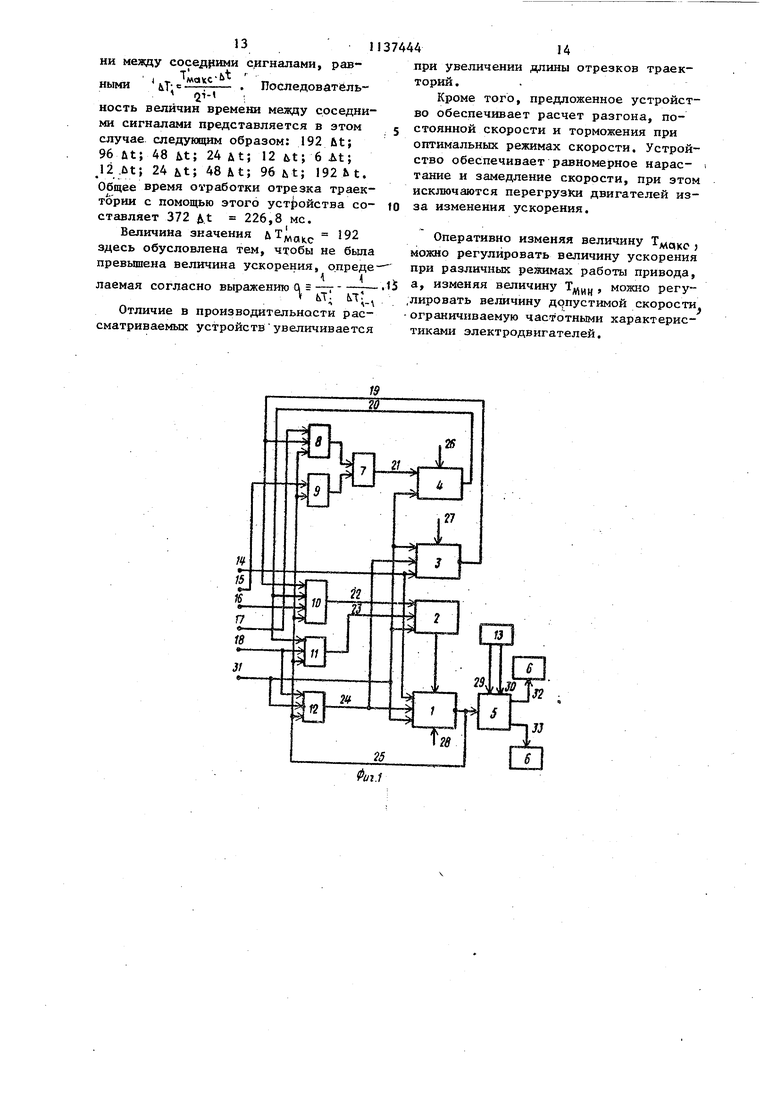
установлен сигнал элементарного приращения дх. Совпадение сигналов на шинах 29 и 25 обеспечивает перекомму- тацию фаз,-с помощью шин 32, и шаговый двигатель отрабатывает первый элементарный шаг их из точки О в точку М (фиг. 3). 9. 1 Сигнал положительного уровня на выходе знакового разряда сумматора 1 (пшна 25) находится до тех пор, пока содержимое сумматора равно или больше нуля. По такту Т5-первого подцикла из содержимого сумматору вычитается число ,|(рИ на шине is устанавливается сигнал нулевого уровня. Это состояние знакового разряда сумматора 1 не изменяется до (тех пор, пока в результате выполнения п опера ций вида - , 9 Г J , где j - номер подцикла;п - количество подциклов в цикле, содержимое сумматора 1 станет больше или равно нулю, что является сигналом на выполнение очередного цикла. В первом подцикле второго цикла на шине 25 устанавливается второй Сигнал управляющей частоты (фиг, 2.е() К этому времени на шинах 29 и 30 уста11бвле ны интерполятором сигналы положительного уровня i X и и У соответственно. В результате совпадения всех этих сигналов на шинах 32 и 33 коммутатор 5 вырабатывает очередные сигналы вьшолнения комбинированного шага, из точки М в точку N (фиг. 3q) и т.д. Операгдаи в счетчиках 2 и 4 и в су1 1маторе 1 (указанные в скобках столбца 3)выполняются в первом подцикле каждого цикла, а п операций в сумматоре 1 (указаны не в скобках) и счетчике 3 выполншотся по такту Т/ в каждом подцикле указанного цикла, В режиме разгона (циклы i-4 в пер вом подцикле каждого цикла из содер жимого счетчика 4 вычитается две еди ницы по тактам Т„ и Т.. Вычитание второй единицы по такту Tj выполняет ся для того, чтобы учееть заранее количество шагов, необходимых для вы полнения торможения. По такту Т( к содержимому счетчика 2 прибавляется единица и, таким образом, коэффициент К увеличивается, на единицу. По такту Tj. в счетчик 3 заносится число 4 мин из содержимого сумматора. 1 вычитается число Тддд. На зтом первый нодцнкл каждого, цикла заканчивается. Режим разгона заканчивается (после выполнения цикла 4, табл. 2), когда в счетчике 3 образуется полоиительное число 2 этом случае на шине 19 устанавливается сигнал нулевого уровня, который блокирует элементы И 8 и 10. Таким образом, запрещается увеличение значения Kj в счетчике 2 и вычитание вторых единиц из содержимого счетчика 4 по такту Т. В режиме постоянной скорости ( циклы 5-81 из содерлсимого счетчика 4 в первом подцикле каждого цикла вычитается единица по такту Т. Длительность в ремени между соседними сигнала-. ми управляющей частоты определяется в этом режиме при постоянном значении К;. Режим постоянной скорости заканчивается (в первом подцикле девятого цикла, таол. l), когда в счетчике 4 образуется отрицательное число. В режиме торможения (циклы 9-11) на шине 20 установлен сигнал нулевого уровня, который блокирует элемент И 10 и разрешает работу элемента И 11, т.е. вычитание в первом подцикле каждого цикла единицы из содержимого счетчика 2. Таким образом, в этом режиме значение уменьшается в каждом цикле на единицу и частота управляющих сигналов уменьшается (фиг. 24, отрезок.ВС). Торможение заканчивается, когда в счетчике 2 образуется число K.V 0. После этого устройство готово принять очередной сигнал начальной установки на шине 31э которьй целесообразно подавать с задержкой на чтоб.ы избежать перегрузок двигателей на границах отрезков траекторий. Если длина траектории, которую должен отработать исполнительный орган , малая (фиг. 3§), например, при uY 5, начальнйх данных ЛХ макс 2, Тмин 3, то. создается ситуация, когда, не достигнув допустимой скорости, должен начаться режим тормолсения. В табл. 3 приведена последовательность операций, вьшолняемых в каждом цикле при этих начальных данных.
(О - 5 -5)
0+1 1 12 : 1 12
2 (0-5 -5)
(I - 5 -4)
12 : 2 6
4 2-1 1(О - 5 -5)
12 : 2 6
(1 - 5 -4)
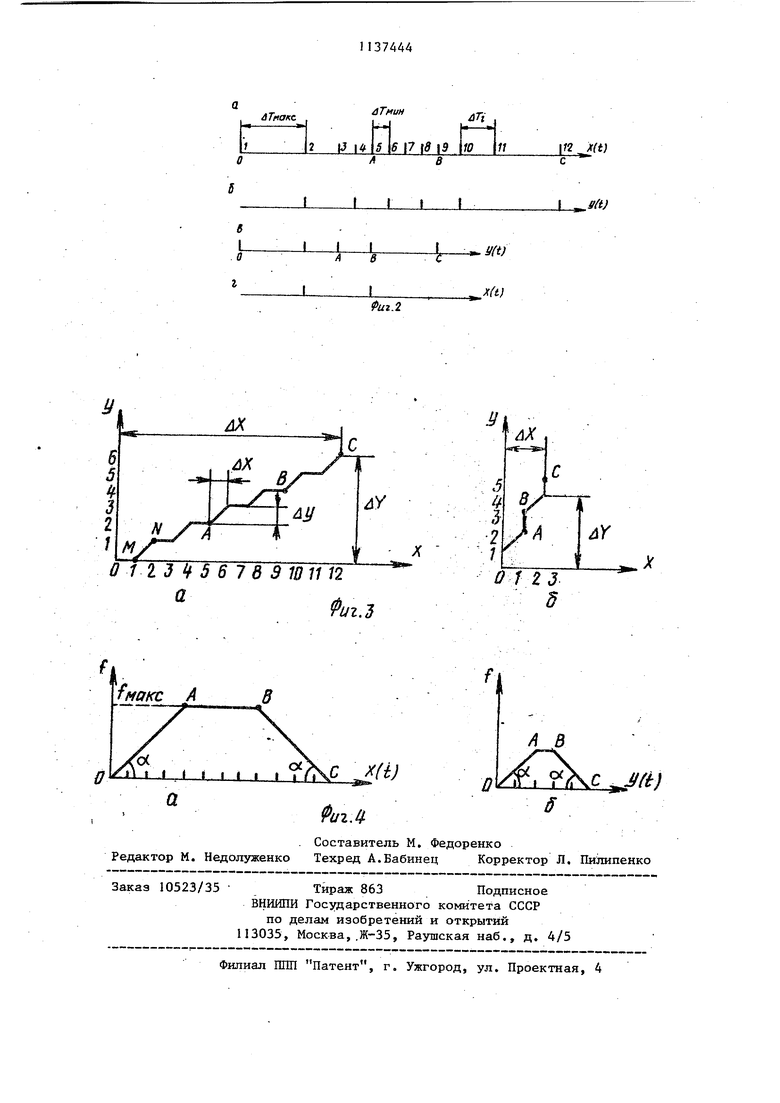
12 : 1 12 На фиг. 26 и 2 1 приведены диаграммы распределения во времени сигналов управляющей частоты у (t), X (t), поступающих на электродвигате ли по шинам 32 и 33. Первый цикл выполняется аналогияно описанному процессу. В первом под цикле третьего цикла в счетчике 2 выполняются две операции. По такту Тд к содержимому счетчика 2 прибавля ется единица, поступающая в виде сиг нала с элемента И 10 по шине 22 на счетный вход этого счетчика. По такту 1л ИЗ содержимого счетчика 4 вычи тается вторая единица и на шине 20 устанавливается сигнал нулевого уров ня, который определяет режим торможения, поэтому по такту Тс из содер жимого счетчика 2 вычитается единица .поступающая в виде сигнала вычитания по шине 23. В результате двух операций в этом цикле значение К в счетчике 2 не изменится. В дальнейшем продолжается режим торможения до пол ной отработки траектории. На фиг. 4 а и 4 б приведены диаграммы изменения частоты управляющих сигналов, пропорциональной скорости движения исполнительного органА при отработке траекторий, представленных на фиг. 3 ,а и 3 б соответствен t 1 но.Угол о,-т- --:з здесь пропорциана luArt f
3--
3-6 О
3-6 0
3 - 12 О
3 - 2 г О лен ускорению при разгоне и торможении . .Эффективность предложенного устройства по сравнению с базовым объектом, в качестве которого выбран прототип, состоит в том, что предложенное устройство существенно повьш1ает производительность отработки траекторий, не допуская перегрузки электродвигателей по ускорению. Для сравнения производительности рассматриваемьгх устройств выберем отрезок траектории, представленный на фиг. 3(5 , при условии нагрузки на электродвигатели по ускорению, не превьш1ающей численно величины 1/12. Предложенное устройство формирует управляющие сигналы с величинами времени между соседними сигналами, равHbiMH SiV .t.t,t. Последователь iность величинвремани между моментами формирования соседних сигналов (фиг. 2а ) в этом случае: 12 t; 6 &t; 4 ut; 3 it; 3 ut; 3 t,t; 3 fit; 3 at; 4 it; 6 t; 12 ut; т.е. общее время отработки отрезка траектории составляет 59 u,t 35,4 мс. Величина ускорения определяется ( ( ( согласно вьфажению Устройство-прототип формирует управляющие сигналы с величинами време13nни между соседрими сигналами, рав iT. . Последователь. ; ность величин времени между соседними сигналами представляется в этом случае следующим образом: 192 fit; 96 at; 48 u.t; 24 &t; 12 6t; 6 At; 12.bt; 24 48 &t; 96 &t; 192 bt. Общее время отработки отрезка траектории с помощью этого устройства составляет 372 ДЛ 226,8 МО. Величина значения 192 здесь обусловлена тем, чтобы не была превьшена величина ускорения, опреде , лаемая согласно выражению Q --г ГГГ ЬТ; (iT.. Отличие в производительности рассматриваемых устройствувеличивается 4 при увеличении длины отрезков траекторий. Кроме того, предложенное устройство обеспечивает расчет разгона, постоянной скорости и торможения при оптимальных режимах скорости. Устройство обеспечивает равномерное нарас- i такие и замедление скорости, при этом исключаются перегрузки двигателей изза изменения ускорения. Оперативно изменяя величину ,, можно регулировать величину ускорения при различных режимах работы привода. f изменяя величину , можно регу лировать величину допустимой скорости, ограничиваемую частотными характеристиками электродвигателей.
I ff(t)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для преобразования постоянного тока | 1948 |
|
SU80722A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
