Изобретение относится к электротехнике и может быть использовано для телеуправления электроприводом с телемеханическим каналом пер(гдачи скорости,
Цель изобретения - повышение поме- хоустойчивости и надежности,
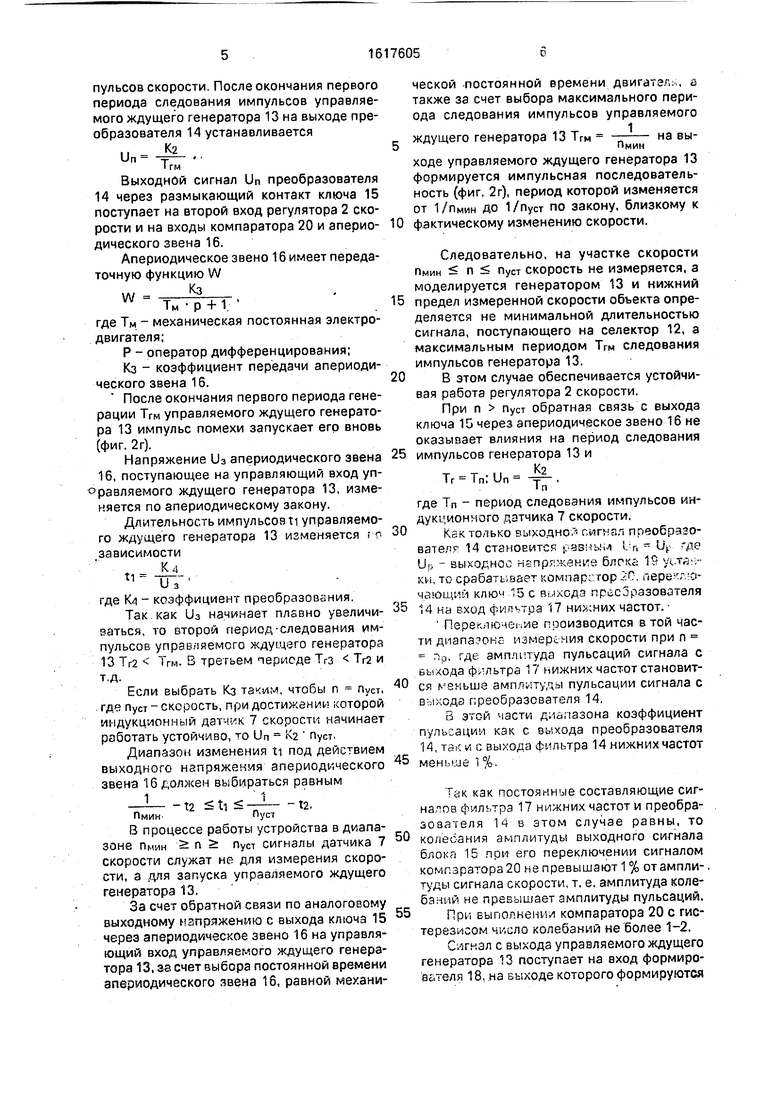
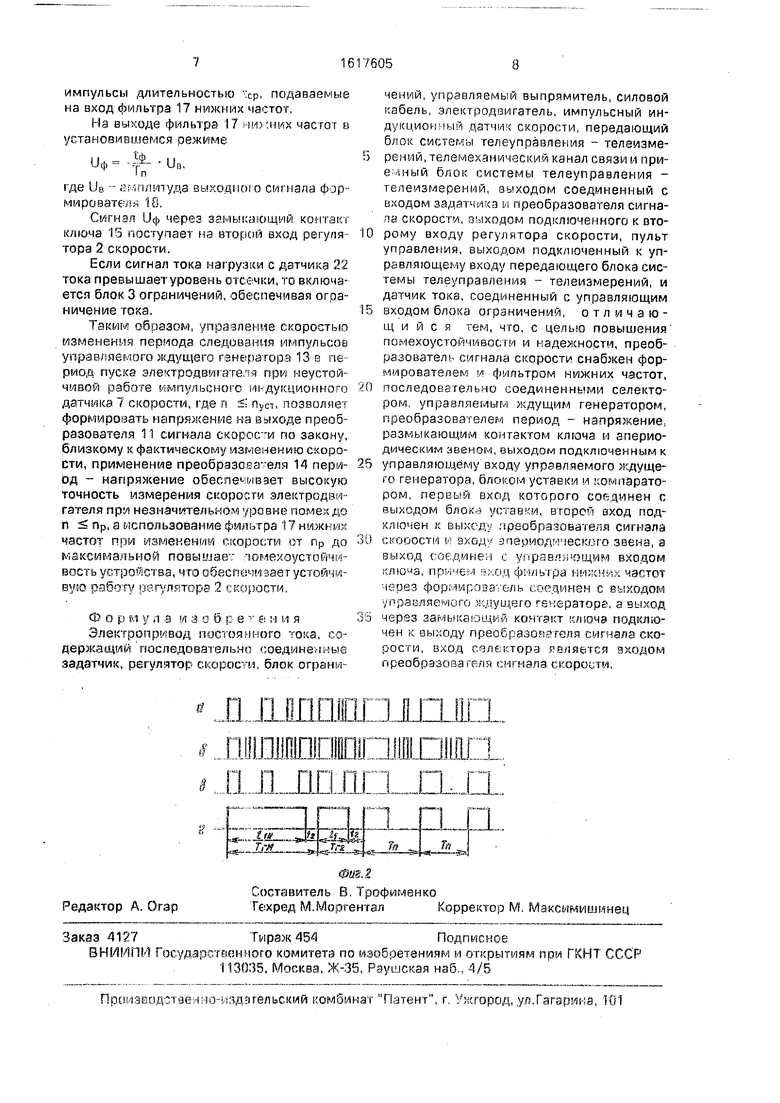
На фиг. 1 изображена схема электропривода; на фиг. 2 - временные диаграммы его работы.
Электропривод постоянного тока со- держит последовательно соединенные за- датчих 1, регулятор 2 скорости, блок 3 ограничений, управляемый выпрямитель А, силовой кабель 5, электродаитатель 6, лм- пульсный индукционный датчик 7 скорости, передающий блок 8 системы телеуправления телеизмерений, телемеханический канал 9 связи, приемный блок 10 системы телеуправления - телеизмерений, выходом соединенный с входами задатчика 1, и пре- образователь 11 сигнала скорости. Преобразователь 11 сигнала скорости выполнен в виде последовательно включенных селектора 12, управляемого генератора 13, преобразователя 14 период - напряже- ние, размыкающего контакта ключа 15 и апериодического звена 16, выходом подключенного к управляю щснм у входу управляемого ждущего генератора 13.
Фильтр 17 «ижних частот выходом сое- динен через замыкающий контакт ключа 15 с выходом преобразователя 11 сигнала скорости, а входом через (|юрмир()8атель 18 - с выходом управляемого жду|дего генератора 13. Блок 19 уставки подключен к входу ком- паратора 20, выход которого соединен с управляющим входом ключа 15, а второй вход компаратора 20 - с выходом преоСфазовате- ля 11 сигнала скорости, соединенного также с вторым входом регулйтора 2 скорости. Вход селектора 12 подключен к выходу при- емногэ блока ТО системы телеуправлений - телеизмерений.
Пульт 21 управления соедмиен с вторым входом передающего блока 8 системы тепе- управления - телеизмерений, а датчик 22 тока - с управляющим входом блока 3 ограничений.
Задатчик 1 выполнен в виде интегратора, работающего в режиме выборки-хране-
НИИ.
Электропривод рабсггает следующим образом.
При включении электропривода с пульта 21 управленмя через передо юи.{ий блок 8 cиcteмы телеуправления - телеизмерений, телемеханический канал 9 и приемный блок 10 системы телеуправления - телеизмерений на задатчик I поступают команды управления. Из выходе задатчикэ
1, работающего в режиме выборки, формируется изменяющееся аналоговое напряжение, поступающее через регулятор 2 скорости и блок 3 ограничения на управляемый выпрям5/1тель 4, выходное напряжение которого чэрез силовой кабель 5 подается на электродвигатель 6.
В процессе пуска электродвигателя 6 от нул.ч до минимальней скорости, при которой импульсный индукционный датчик 7 скорости начинает устойчиво работать, сигнал дзтчика 7 дробитсй (фиг. 2а) и его частота не соответствует скорости электродвигателя. Выходные сигналы датчика 7 имеют прямоугольную форму, так как в состав датчика 7 входит усилитель-ограничитель. Сигнал датчика 7 скоросп 1 через блок 8, телемеханический канал 9 связи и блок 10 поступает на преобразователь 11 сигнала скорости. На сигналы датчика 7 скорости в телемеханическом канале 9 связи накладываются сигналы импульсных ком /л/тационных помех, наведенных от упрзвляемого выпрямителя 4, поэтому выходные сигналы блокз 10 имеют вид, показанный на фиг. 26. Эти сигналы поступают на вход селектора 12, в котором осуществляется селекция по длительности импульсое помехи, длительность которых меньше минимально возможной длительности импульсов скорости (фиг.-2в).
Импульсы, нормированные по длительности, с выхода селектора 12 запускают передним фронтом первого импульса управляемый ждущий генератор 13. Максимально возможную длительность импульса управляемого плеча ждущего генератора 13 выбирают из условия
1
Ни Тгм - t2 - ts,
П мин
где Тгм - максимально возможный период следования импульсов генератора 13;
12 длительность импульса неуправляемого плеча управляемого . генератора 13;
Пмин - минимальная /;5Р 1еряек я скорость.
Импу/зьс с у,правляемо1 о ждущего генерэтора 13 поступает на преобразова- гель 14 период - напряжекме. з котором осуш.ествляется преобразование
I . J .ЬЛUn - -.f ,
где Un - выходное напряжение преобразователя 14 период- напряжение;
К2 - коэффициент преобразования;
Тг - период следования импульсов генератора 13.
Преобразование осущесталяетсй по окончании каждого периода-следованкй иг ульсов скорости. После окончания первого ериода следования импульсов управляеого ждущего генератора 13 на выходе пребразователя 14 устанавливается
К2
Un
Т
гм
Выходной сигнал Un преобразователя 14 через размыкающий контакт ключа 15 поступает на второй вход регулятора 2 скорости и на входы компаратора 20 и апериоического звена 16.
Апериодическое звено 16 имеет передаточную функцию W
...Кз
-- Тм Р + 1.
где Тм - механическая постоянная электродвигателя;
Р - оператор дифференцирования;
Кз - коэффициент передачи апериодического звена 16.
После окончания первого периода генерации Тгм управляемого ждущего генератора 13 импульс помехи запускает его вновь (фиг. 2г).
Напряжение Уз апериодического звена 16, поступающее на управляющий вход уп- равляемого ждущего генератора 13, изменяется по апериодическому закону.
Длительность импульсов ti управляемого ждущего генератора 13 изменяется го зависимости
г.- ti - ,
где К - коэффициент преобразования.
Так.как Уз начинает плавно увеличиваться, то второй период-следования импульсов упр8в/ яемого ждущего генератора 13 Тг2 Тгм. В третьем периоде Тгз Тг2 и т.д.
Если выбрать Кз таким, чтобы п - Пуст, . где Пуст - скорость, при достижении которой индукционный 7 скорости начинает работать устойчиво, то Un Ка Пуст,
Диапазон изменения ti под действием выходного напряжения апериодического звена 16 должен выбираться равным 1.. 1
-t2 :Sti
12.
Пмин-
В процессе работы устройства в диапазоне Пмин п Пуст сигналы датчика 7 скорости служат не для измерения скорости, а для запуска управляемого ждущего генератора 13.
За счет обратной связи по аналоговому выходному напряжению с выхода ключа 15 через апериодическое звено 16 на управляющий вход управляемого ждущего генератора 13, за счет выбора постоянной времени апериодического звена 16, равной механической постоянной времени двигатэг,:, а акже за счет выбора максимального периода следования импульсов управляемого
ждущего генератора 13 Тгм - на вы МИН
ходе управляемого ждущего генератора 13 формируется импульсная последовательность (фиг. 2г), период которой изменяется от 1/пмин до 1/Пуст по закону, близкому к фактическому изменению скорости.
Следовательно, на участке скорости Пмин п Пуст скорость не измеряется, а моделируется генератором 13 и нижний
предел измеренной скорости объекта определяется не минимальной длительностью сигнала, поступающего на селектор 12, а максимальным периодом Тгм следования импульсов генератора 13.
В этом случае обеспечивается устойчивая работа регулятора 2 скорости.
При п Пуст обратная связь с выхода ключа 1G через апериодическое звено 16 не оказывает влияния на период следования
импульсов генератора 13 и
т -т 1 -
1г - I п, Un - т .
I 1
где Тп - период следования импульсов ин- дукционкого датчика 7 скорости,
Как только выходно, ; сигнал преобразователя 14 станоБитсй равный l. n Uj.-- где Ur - выходное нгпряжен1 е блока 19 ус-Тй:;- ки, то срабатывает компарг/гор 2С, переь гло- ключ 15 с выхсдэ пресоразователя
14 на вход фильтра 17 нийжих частот.
Переключеп ие производится в той части диапазона измерения скорости при п пр, где амплитуда пульсаций сигнала с выхода фильтра 17 нижних частот становитСи меньше ампл гтуды пульсации сигнала с выхода преобразователя 14.
В этой части диапазона коэффициент пульсации как с выхода преобразователя 14, так и с выхода фильтра 14 нижних частот
меньше 1%.
Так как постоянные составляющие сиг- на..пов фильтра 17 нижних частот и преобразователя 14 в этом случае равны, то
колебания амплитуды выходного сигнала блока 15 при его переключении сигналом компаратора 20 не превышают % от амплитуды сигнала скорости, т. е. амплитуда колебаний не превышает амплитуды пульсаций.
При выполнении компаратора 20 с гистерезисом число колебаний не более 1-2,
Сигнал с выхода управляемого ждущего генератора 13 поступает на вход формиро- аателя 18, на выходе которого формируются
Уф
Un,
импульсы длительностью ср, подаваемые на вход фильтра 17 нижних частот.
На выходе фильтра 17 ни);них частот в установившемся режиме
.М Тп
где UB - йг -шлмтуда выходного сигнала фор-ми ровател я 18,
Сигнал Уф через замыкающий контакт ключа 15 поступает на второй вход регуля- тора 2 скорости.
Если сигнал тока нагрузки с датчика 22 тока превышает уровень отсечки, то включается блок 3 ограничений, обеспечмвая ограничение тока.
Таким образом, упразление скоростью изменения периода следования импульсов управляемого ждуа1его гене ратора 13 в пе- рмод пуска электродвигателя при неустойчивой работе ммпульсно1 0 индукционного датчика 7 скорости, где п Пуст, позволяет формировать напряжение на выходе преобразователя 11 сигнала скорос- и по закону, близкому к фактическому изменению скорости, применение преобразователя 14 перм- Ьд - напряжение обеспечивает высокую точность измерения скорости электродвигателя при незначительном уровне помех до п Пр, а мспользованме фильтра 17 нижних частот при измененми с.корос;тм от Пр до максимальной повышает ю мехоустойч / - вость устройства, что обеспечмзаетустойчивую работу р8П/лятора 2 скорости.
Фор м у л а и 3 о б р е е -i и я
Электропривод послзяиного тока, со- держащ - й последовательно (соединенные задатчик, регулятор скорости, блок ограничений, управляемый выпрямитель, силовой кабель, электродвигатель, импульсный индукционный датчик скорости, передающий блок системы телеуправления - телеизмерений, телемеханический канал связи и при- е-лный блок системы телеуправления - телеизмерений, выходом соединенный с входом задатчика и преобразователя сигнала скчОрости, выходом подключенного к второму входу регулятора скорости, пульт управления, выходом подключенный к управляющему входу передающего блока системы телеуправления - телеизмерений, и датчик тока, соединенный с управляющим входом блока ограничений, отличаю- щ и и с я тем, что, с целью повышения помехоустойчивости и надежности, преобразователь сигнала скорости снабжен формирователем /« фильтром нижних частот, последовательно соединенными селектором, управляемым ждущим генератором, преобразователем период - напряжение, размыкающим контактом ключа и апериодическим звеном, выходом подключенным к управляющему вхо,цу управляемого вдуще- го генератора, блоком уставки и зсомпарато- ром, первьмЛ вход которого соединен с выходом блока уставки, второй вход подключен к выходу преобразователя сигнала скорости и входу зпериоягу чес а.)го звена, а выход соединен с управлячзщим входом клю«а, прмчб1и вход фильтра нижних частот через формирователь соединен с выходом управляемого ждущего генераторе, а выход через замь ающий контакт ключа подключен к выходу преобразоггиэгсля сигнала скорости, вход свле а-ора является входом преобрэзовагеля сигнала скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Телемеханическая система | 1983 |
|
SU1211783A1 |
| Система для передачи команд телеуправления и телеизмерения | 1974 |
|
SU639002A1 |
| Система телемеханики | 1982 |
|
SU1152015A1 |
| Диспетчерский комплект системы многоканальной телеметрии | 1984 |
|
SU1322350A1 |
| Многоканальная телемеханическая система | 1982 |
|
SU1164764A1 |
| Многоканальная время-импульсная телеизмерительная система | 1984 |
|
SU1288738A1 |
| Телемеханическая система | 1982 |
|
SU1037312A1 |
| Устройство для телеуправления и телесигнализации контролируемого пункта | 1976 |
|
SU643947A1 |
| Й РАСХОДОМЕР | 1972 |
|
SU347579A1 |
| ВСЕСОЮЗНАЯ Л. А. Шойхет, А. С. Белима, А. Г. Мелик-Аскаров, }j^,..^,..,.. ^^^,,,,.,.^^В. М. Гаврилюк, Б. И. Семеняк и А. А. Казьмина р^"—"!Н1'~1':ХН'''-;5\?{ЛЯ | 1970 |
|
SU287550A1 |
Изобретение относится к электротехнике и может быть использовано для телеуправления электроприводом с телемеханическим каналом передачи скорости. Целью изобретения является повышение помехоустойчивости и надежности. Электропривод постоянного тока содержит последовательно соединенные задатчик 1, регулятор 2 скорости, блок 3 ограничений, управляемый выпрямитель 4, силовой кабель 5, электродвигатель 6, импульсный индукционный датчик 7 скорости, передающий блок 8 системы телеуправления-телеизмерений, телемеханический канал 9 связи, приемный блок 10 системы телеуправления-телеизмерений, соединенный с входом задатчика 1 и преобразователя 11 сигнала скорости. В устройстве цель достигается тем, что преобразователь 11 сигнала скорости снабжен последовательно соединенными селектором 12, управляемым ждущим генератором 13 и преобразователем 14 период-напряжение, что дает высокую точность измерения скорости при незначительном уровне помех. 2 ил.
.Jl JlElIllinmjILiLl
.с.11шш а1пажпж:1
I Л..Л....
| Серия комплектных тиристорных злект- роприводов постоянного тока типа Valutrol.- Автоматизированный электропривод | |||
| Электротехнология и электроснабжение промышленных предприятий | |||
| Экспресс-информация | |||
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Способ приготовления кирпичей для футеровки печей, служащих для получения сернистого натрия из серно-натриевой соли | 1921 |
|
SU154A1 |
| Многодвигательный тирмсторный электропривод скребковых конвейеров | |||
| - Уголь, 1984, NJ 5, с | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
