Изобретение относится к виброиспытательной технике и может быть использовано при вибрационных испытаниях протяженных упругих конструкций в машиностроении и приборостроении.
Цель изобретения - повышение достоверности получаемой информации за счет уменьшения длительности переходных процессов.
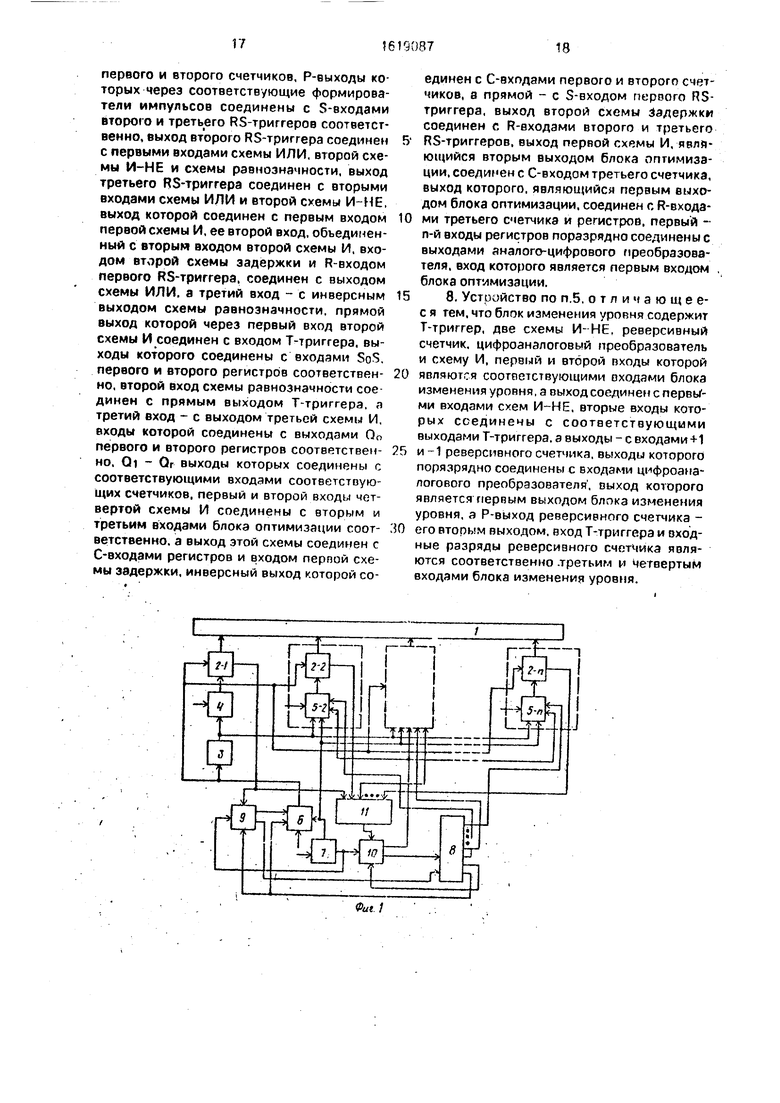
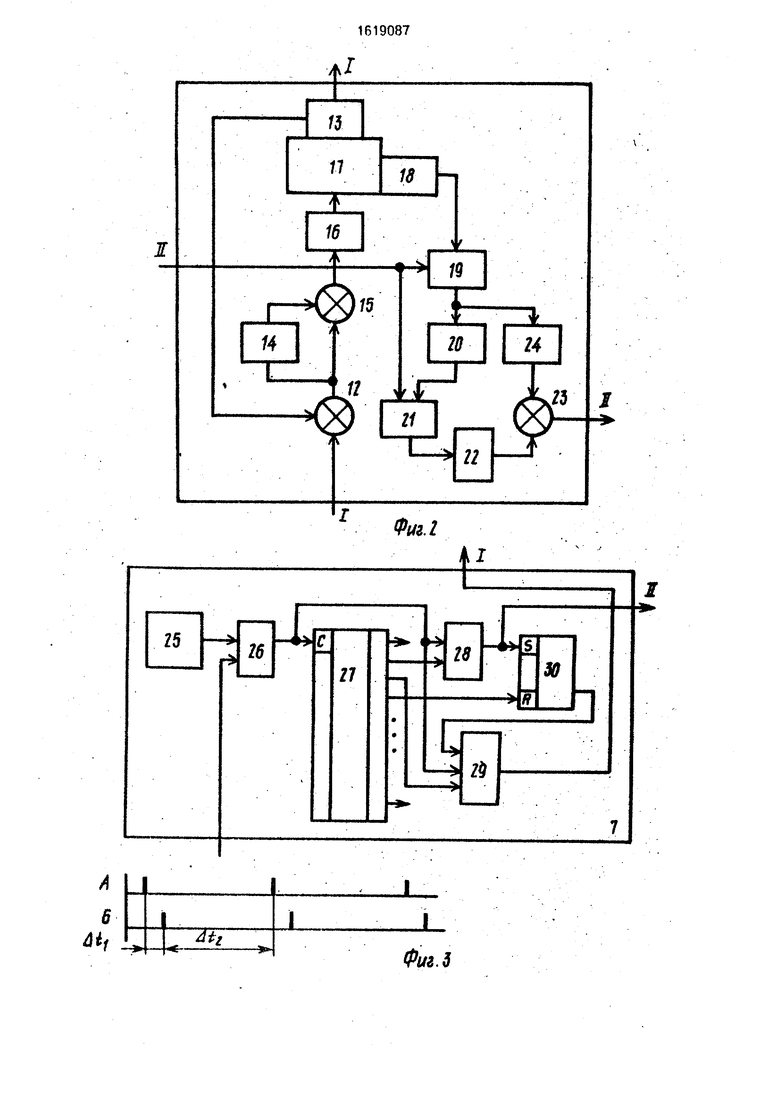
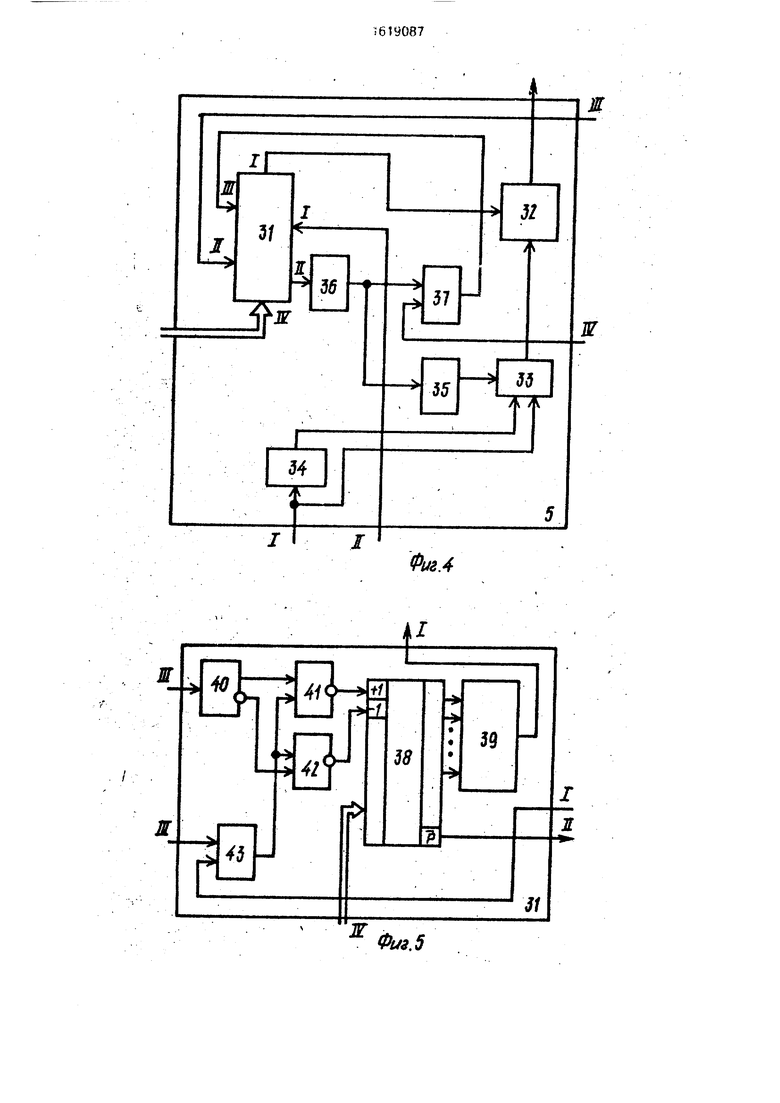
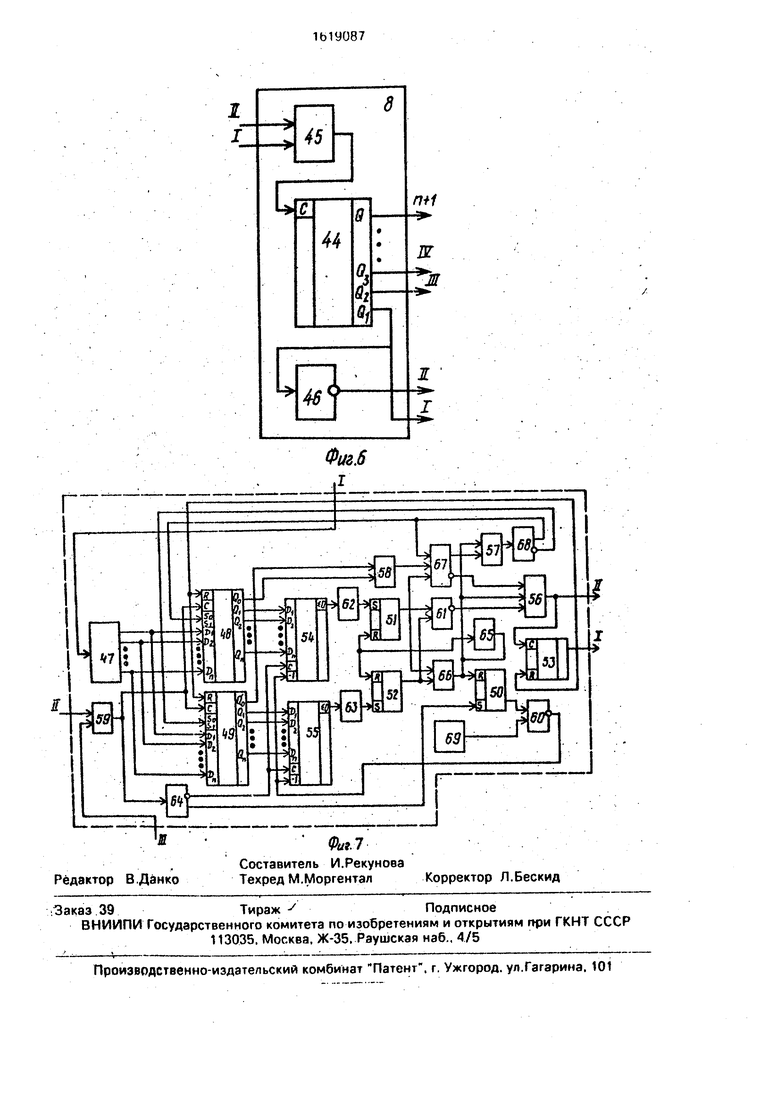
На фиг.1 представлена структурная схема устройства, реализующего способ определения собственных форм и частот колебаний испытуемого обьекта; на фиг.2 структурная схема вибромодуля; на фиг.З - структурная схема генератора управляющих импульсов; на фиг.4 - структурная схема блока изменения амплитуды; на фиг.5 - структурная схема блока изменения уровня; на фиг.6 - структурная схема блока управления; на фиг.7 - структурная схема блока оптимизации.
В устройстве для осуществления способа (фиг.1) на испытуемый объект. 1 воздейст-. вует л вибромодулей 2. Задающий генератор 3 через регулируемый усилитель 4 соединен с первым входом первого виброО
ю о
00
VI
одуля 2, а через перйые входы п-1 блоков изменения амплитуды - с первыми входаи остальных вибромодулей, блок 6 изменеия частоты выходом соединен с задающим енератором 3 и вторыми входами вибромоулей 2. генератор 7 управляющих импульов первым входом соединен с вторыми ходами блоков 5 изменения амплитуды и ервым входом блока 6 изменения частоты, лок В управления входами соединен с первыми выходами блоков 9 и 10 оптимизации оответственно, первым выходом - с вторым входом блока 6 изменения частоты и третьим входом блока 9 оптимизации, вторым - с третьим входом блока 10 оптимизации, третьим - (п И)-м - с третьими входами блоков 5 изменения амплитуды соответственно, сумматор 11 входами соединен с вто- рыми выходами п вибромодулей 2, а выходом - с первым входом блока 10 оптимизации, второй выход которого соединен с четвертыми входами блоков 5 изменения амплитуды, второй выход генератора 7 управляющих импульсов соединен с вторыми входами блоков 9 и 10 оптимизации, выход первого вибромодуля 2-е первым входом блока 9 оптимизации, второй выход которого соединен с третьим входом блока б изменения частоты. Второй вход регулируемого усилителя 4, пятые входы блоков 5 изменения амплитуды и четвертый вход, блока 6 изменения частоты являются установочными. На вход генератора 7 управляющих импульсов подается команда Пуск.
Вибромодуль 2 (фиг.2) включает сумматор 12, первый вход которого-является первым входом вибромодуля 2. второй вход соединен с выходом датчика 13 перемещения, а выход - через блок 14 дифференцирования и непосредственно соединен с первым и вторым входами сумматора 15, выход которого через релейный элемент 16 соединен с вибратором 17, выход датчика 18 тока которого соединен с первым входом следящего фильтра 19, выход которого через блок 20 дифференцирования соединен С первым входом блока 21 деления, второй вход которого, объединенный с вторым входом следящего фильтра 19, является вторым входом вибромодуля, выход блока 21 деления через квадратор 22 соединен с первым входом сумматора 23, второй вход которого через квадратор 24 соединен с выходом следящего фильтра 19. Выход вибратора 17 через датчик 13 перемещения является первым выходом вибромодуля 2, а выход сумматора 23 - вторым выходом.
Генератор 7 управляющих импульсов (фиг.З) содержит 1внератор 25 тактовых импульсов, соединенный с первым входом схемы И 26, на второй вход которой подается команда Пуск, регистр 27 сдвига, вторым выходом соединенный с первым входом схемы И 28, третьим - с третьим входом
схемы И 29, четвертым - с R-входом RS-триг- гера 30, выход которого соединен с первым входом схемы И 29, второй вход которой, объединенный с вторым входом схемы И 28 и с входом регистра 27 сдвига, соединен с
0 выходом схемы И 26, выход схемы И 29 является первым выходом генератора управляющих импульсов, выход схемы И 28 соединен с S-входом RS-триггера 30 и является вторым выходом генератора управляю5 щих импульсов.
Блок 5 изменения амплитуды (фиг.4) включает блок 31 изменения уровня (БИУ), регулируемый усилитель 32, управляющим входом соединенный с первым выходом
0 БИУ 31, коммутатор 33. выходом соединенный с прямым входом регулируемого усилителя 32, инвертор 34, вход которого, объединенный с первым входом коммутатора 33, является первым входом блока 5 из5 менения амплитуды, а выход соединен с вторым входом коммутатора 33, Т-триггер 35, выходом соединенный с третьим входом коммутатора 33, формирователь 36 импульсов, схему ИЛИ 37. второй выход БИУ 31
0 через формирователь 36 импульсов соединен с входом Т-триггера 35 и первым входом схемы ИЛИ 37, второй вход которой является четвертым входом блока 5 изменения амплитуды, второй третий и пятый входы
5 которого являются первым, вторым и чет- , вертым входами БИУ 31 соответственно, выход схемы ИЛИ 37 соединен с третьим входом БИУ 31, а выход регулируемого усилителя 32 является выходом блока измене0 ния амплитуды.
Блок 31 измерения уровня (фиг.5) содержит реверсивный счетчик 38, выходами поразрядно соединенный с входами ЦАП 39, выход которого является первым выходом
5 БИУ 31, Т-триггер 40, схемы И-НЕ 41 и 42, схему И 43. входы которой являются первым и вторым входами БИУ 31. а выход соединен с первыми входами схем И-НЕ 41 и 42, вход Т-триггера 40 является третьим входом БИУ
0 31, а его прямой и инверсный выходы соединены с вторыми входами схем И-НЕ 41 и 42 соответственно, выходы которых соединены с входами +1 и -1 реверсивного счет чика 38 соответственно, входные разряды
5 которого являются четвертым входом БИУ 31. а Р выход - его вторым выходом.
Блок 8 управления (фиг.6) содержит регистр 44 сдвига, схему ИЛИ 45 и инвертор 46, вход которого соединен с первым выходом регистра 44 сдвига и является первым
выходом блока 8 управления, а выход - вторым выходом блока 8 управления, второй - n-й выходы регистра 44 сдвига являются третьим - п-И-м выходами блока 8 управления, счетный вход регистра сдвига соединен с выходом схемы ИЛИ 45, входы которой являются первым и вторым входами блока 8 управления.
Блоки 9, 10 оптимизации (фиг.7} содержат аналого-цифровой преобразователь 47. вход которого является первым входом блока оптимизации, регистры 48 и 49, своим первым - R-м входами поразрядно соединенные с выходами АЦП 47, RS-триггеры 50 - 52, счетчики 53 - 55, схемы И 56 -- 59, схемы И-НЕ 60, 61. формирователи 62 и 63 импульсов, схемы 64 и 65 задержки, схему ИЛИ 66. схему 67 равнозначности, Т-триг- гер 68, генератор 69 тактовых импульсов, выходом соединенный с первым входом схемы И-НЕ 60. второй вход которой соединен с выходом триггера 50, а выход - с вычитающими входами счетчиков 54 и 55. Р-выходы которых через формирователи 62 и 63 импульсов соответственно соединены с 5-входами RS-триггеров 51 и 52, выход RS-трштера 51 соединен с первыми входами схемы ИЛИ 66, схемы И-НЕ 61 и схемы равнозначности, выход RS-триггера 52 соединен с вторыми входами схемы ИЛИ 66 и схемы И-НЕ 61, выход которой соединен с первым входом схемы И 56, ее второй вход, объединенный с вторым входом схемы И 57, входом схемы 65 задержки и R-входом RS- триггера 50. соединен с выходом схемы ИЛИ 66, а третий вход - с инверсным выходом схемы равнозначности, прямой выход которой соединен с первым входом схемы И 57, выход которой соединен с входом Т- триггера 68, выходы которого соединены с входами So. Si регистров 48 и 49 соответственно, второй вход схемы 67 равнозначно сти - с прямым выходом Т-триггера 68, а третий вход - с выходом схемы И 58, входы коюрой соединены с выходами Q0 регистров 48 и 49, выходы Qi - Qr которых соединены с соответствующими входами счетчиков 54 и 55 соответственно, первый и второй входы схемы И 59 являются вторым и третьим входами блока оптимизации, а выход этой схемы соединен с С-входами регистров 48 и 49 и входом схемы 64 задержки, инверсный выход которой соединен с С-входами счетчиков 54 и 55, а прямой - с S-входом RS-триггера 50, выход схемы 65 задержки соединен с R-входами RS-триггеров 51 и 52. выход схемы И 56, являющийся вторым выходом блока оптимизации, соединен с С-входом счетчика 53, выход которого, являющийся первым выходом блока оптимизации, соединен с R-входами счетчика 53 и регистров 48 и 49.
Способ осуществляется следующим образом.
5В исходном состоянии в регулируемом
усилителе 4 устанавливают заданную амплитуду вибрации первого вибратора 17. а в блоках 5 изменения амплитуды (БИА 5z - БИА 5п) - через установочные входы ампли10 туды колебаний других вибраторов 17. Так, если в относительных единицах амплитуда колебаний первого вибратора 17 AI 1, то для отыскания первой формы колебаний устанавливают А2 Аз ... ™ An 1. Если
15 ищется втосая форма,то 2... Ап/2 1. а Ап/2 + 1 ... An -1 и т.д. В блоке 6 изменения частоты устанавливают некоторую частоту вибраций (любое значение из диапазона, в котором ищется резонансная
20 частота). В блоке 8 управления устанавливают логическую единицу на первом выходе. По команде Пуск генератор 7 управляющих импульсов (ГУИ) начинает иырабаты- вать две последовательности импульсов А и
25 Б (фиг.З). При этом Д ti определяется временем обработки информации, a At2 - временем затухания переходных процессов, вызванных изменением частоты колебаний или амплитуды какого-либо канала возбуж30 дения. Заданное в блоке 6 изменения частоты значение воздействует на задающий генератор 3, который вырабатывает синусоидальные колебаний заданной частоты. Этот сигнал, проходя через регулируемый
35 усилитель 4 и БИА 52 - БИА 5П. вызывает колебания рабочих органов вибромодулей 2 в соответствии с установленной амплитудой колебаний. Поскольку вибратор 17 вибромодуля 2 работает э скользящем режиме, то
0 колебания рабочего органа повторяют сигнал от регулируемого усилителя 4 или БИА 52 - 5ИА 5П по амплитуде, частоте и фазе. Значение затрачиваемой на организацию такого движения силы (эквивалентное уп- 5 равление) первого вибратора 17 подается на блок 9 оптимизации. По импульсу А последовательности от ГУИ 7 блок 9 оптимизации запомнит это значение, а импульс Б последовательности от ГУИ 7, воздействуя 0 на блок 6 изменения частоты, изменит значение частоты задающего генератора 3. Следующий импульс А последовательности через время Д т.2 после импульса Б последовательности (время окончания переходных 5 процессов) поступает на блок 9 оптимизации и тот запомнит новое значение затрачи- ваемой силы или эквивалентного управления. Если это новое значение окажется меньше старого, то старое значение стирается и направление изменения частоты в блоке 6 изменения частоты не меняется. Следующий импульс А последовательности запишет новое значение эквивалентного управления на место стертой. Если новое значение окажется больше старого, то новое значение стирается и блок 9 оптимизации воздействует на блок б изменения частоты, который меняет направление изменения частоты на противоположное.
После отыскания минимального значения эквивалентного управления блок 9 оптимизации воздействует на блок 8 управления, в результате чего логическая 1 устанавливается на втором и третьем выходах блока 8 управления (в дальнейшем одна логическая 1 будет оставаться на втором выходе, а другая двигаться на четвертый - n-й выходы блока 8 управления. Блок 9 оптимизации и блок 6 изменения частоты отключаются от работы. В работу включается блок 10 оптимизации, который оптимизирует сумму квадратов амплитуд эквивалентных управлений по параметрам амплитуд AI колебаний вибраторов 17 AI Оптимизируемый сигнал поступает от сумматора 11. Работа блока 10 оптимизации аналогична работе блока 9 оптимизации. Импульс Б последовательности от ГУН 7 поступает на все БИА 5, но проходит только на тот, которому соответствует логическая 1 на выходе блока 8 управления. В данном случае он пройдет только на БИА 52 и изменит амплитуду колебаний второго вибромодуля 7. Если это изменение приведет к уменьшению суммы квадратов эквивалентных управлений, то направление изменения амплитуды останется прежним, если к увеличению - изменится на противоположное. После отыскания минимального значения суммы квадратов эквивалентных управлений по параметру А2 блок 10 оптимизации воздействует на блок 8 управления и логическая 1 передвигается на четвертый выход. Начинается изменение амплитуды колебаний третьего вибратора 17 Аз и т.д. После отыскания минимума суммы квадратов эквивалентных управлений по параметру An логическая Г в блоке 8 управления передвигается на первый выход, отключается блок 10 оптимизации, а включается блок 9 оптимизации и блок 6 изменения частоты. Начинается новый цикл с изменения частоты колебаний задающего генератора 3.
После нескольких таких циклов работы асе экстремальные характеристики будут иметь минимум на одной частоте ад, что будет соответствовать минимуму суммы квадратов эквивалентных управлений всех
вибраторов 17. Минимум же амплитуды эквивалентного управления первого вибратора будет означать, что частота колебаний задающего генератора 3 равна - собственной частоте колебаний на данной форме колебаний. Параметры формы колебаний определяют из полученных значений амплитуд колебаний второго - n-го вибромодулей 2. Окончание процесса отыскания собственной частоты сигнализируется нулевым приращением изменения частоты и амплитуд колебаний каждым вибромодулем, что отображается блоком регистрации (не показан). Другие собственные частоты на
соответствующих формах колебаний находят новым запуском устройства из новых начальных значений AI.
Вибромодуль 2 (фиг.2) работает следующим образом.
Сигнал от регулируемого усилителя 4 или БИА 5 поступает на первый вход сумматора 12, на второй вход которого подается сигнал с датчика 13 перемещения. Получаемый сигнал ошибки непосредственно и поеле дифференцирования и домножения на. некоторый коэффициент К. определяющий наклон линии переключения, в дифференциаторе 14 поступает на входы сумматора 15, на выходе которого получается сигнал
функции переключения. Этот сигнал воздействует на релейный элемент 16, который вызывает движение в скользящем режиме рабочего органа вибратора 17. Таким образом, вибратор 17 работает з двигательном
режиме и колебания его рабочего органа повторяют сигнал на первом входе сумматора 12. Затрачиваемое на организацию скользящего режима усилие (эквивалентное управление) пропорционально току подвижной обмотки вибратора 17 и измеряется датчиком 18 тока. Проходя через следящий фильтр 19, этот сигнал дифференцируется дифференциатором 20 и делится на значение частоты задающего сигнала в блоке 21
деления, после чего возводится в квадрат квадратором 22 и складывается в сумматоре 23 с квадратом выходного сигнала следящего фильтра 19 от квадратора 24,
Так как на следящий фильтр 19 подается
также сигнал заданного значения частоты, то он отфильтровывает все остальные колебания, вызванные организацией скользящего режима. Поэтому, если на выходе следящего фильтра 19 сигнал
Xi lmsin( p),
то на выходе блока 21 деления будет сигнал i
Х2 lmCOs(u; t+ p).
а на выходе сумматора 23 сигнал U , т.е. пропорциональный квадрату амплитуды эквивалентного управления.
ГУИ 7 (фиг.З) работает следующим образом.
В исходном состоянии схемой предустановки (не показана) в младший разряд регистра 27 сдвига заносится 1, RS-триг- гер 30 устанавливается в состоянии О. По команде Пуск импульсы с генератора 25 тактовых импульсов поступают через схему И 26 на счетный вх од регистра 27 сдвига. Логическая единица переносится во второй разряд и через схему И 28 импульс от схемы И 26 формирует импульс А последовательности ГУИ 7, э также перебрасывает RS- триггер 30 и логическую 1. Частота следования импульсов генератора 25 тактовых импульсов выбирается из времени Дп. Следующий импульс ГТИ 25 сдвинет 1 регистра 27 сдвига в третий разряд, пройдет через схему И 29, создав импульс Б последовательности. Следующим тактовым импульсом RS-триггер 30 снова переключится в состояние логического О. Число разрядов регистра 27 сдвига m выбирается из следующего соотношения
m
4- t
жт + 1
Дойдя до гл-ro рязряда. логическая 1 переписывается в первый разряд и процесс работы продолжается.
Блок 5 изменения амплитуды (фиг.4) работает следующим образом.
Начальное значение амплитуды колебаний устанавливается в виде кода в БИУ 31. который преобразуется в непрерывный сигнал на первом выходе этого блока и управляет коэффициентом усиления регулируемого усилителя 32. На прямой вход регулируемого усилителя 32 поступает сигнал от задающего генератора 3 либо непосредственно, либо через инвертор 34 с помощью коммутатора 33, который управляется Т-триггером ,35. Если начальный коэффициент формы колебаний положительный, т.е. AI 0, то на выходе Т-триггера 36 устанавливается логическая 1 и коммутатор 39 соединяет задающий генератор 3 с регулируемым усилителем 32. Если AI 0, то на выходе Т-триггера 35 логический О, и коммутатор 33 соединяет инвертор 34 с регулируемым усилителем 32. Если от блока 8 управления поступает логический О (третий вход БИА 5), то импульсы Б последовательности, поступающие на второй вход БИА 5. не меняют сигнал на первом выходе
БИУ 31 и коэффициент усиления регулируемого усилителя 32. При поступлении логической 1 от блока 8 управления каждый импульс Б последовательности вызывает 5 изменение сигнала на первом выходе БИУ 31. что вызывает изменение амплитуды колебаний AI на выходе регулируемого усилителя 32.
Если в процессе изменения AI достигает 10 нуля, а амллитуду колебаний следует еще дальше уменьшить (в сторону отрицательных чисел), то при достижении AI 0 изменится уровень сигнала на втором выходе БИУ 31 с Г на О . Формирователь 36 им- 15 пульсов отреагирует на это импульсом через схему ИЛ И 37, воздействуя на БИУ 31, который переключится с режима уменьшения сигнала на первом выходе в режим увеличения сигнала. Кроме того, импульс переклю- 0 чит Т-трмггер 35, который воздействует на коммутатор 33, и тот, в свою очередь, будет подавать на вход регулируемого усилителя 32 сигнал от иноертора 34, находящийся в противофазе с сигналом задающего генера- 5 тора 3. В дальнейшем, хотя сигнал на первом выходе БИУ 31 будет увеличиваться. амплитуда колебаний будет уменьшаться, так как на прямой вход регулируемого усилителя 32 подается инверсный сигнал, кото- 0 рый можно рассматривать как сигнал с отрицательной амплитудой.
Аналогичным образом происходит работа и при переходе из отрицательных значений амплитуд колебаний в 5 положительные. Направление изменения амплитуды колебаний на выходе регулируемого усилителя 32 может меняться и сигналом от блока 10 оптимизации, поступающим на четвертый вхсд БИА 5. Этот сигнал про- 0 ходит через схему ИЛИ 37 и меняет направление изменения сигнала на первом выходе БИУ 31.
БИУ 31 (фиг.5) работает следующим образом.
5 В реверсивный счетчик 38 схемой предустановки (не показана) заносится начальное значение параметра. Если БИУ 31 находится в составе БИА 5, то это амплитуда, если в составе блока 6 изменения часто- 0 ты - то частота. Наличие логической 1 на втором входе с выхода блока 8 управления позволяет схеме И 43 пропускать импульсы Б последовательности, поступающие от ГУИ 7 на первый вход БИУ 31. Эти импульсы 5 проходят через одну из схем 41 или 42 и в зависимости от состояния триггера 40 увеличивают или уменьшают содержимое реверсивного счетчика 38. Выходной код реверсивного счетчика 38 преобразуется с помощью ЦАП 39 в непрерывный сигнал.
Когда нз всех выходах реверсивного счетчика логический О, и на его выходе Р устанавливается логический О. Импульсы, поступающие на третий вход БИУ 31 от блока оптимизации, переключают Т-триггер 40, тем самым меняя направление изменения параметра.
Блок 8 управления (фиг.6) работает следующим образом.
В исходном состоянии схемой предустановки {не показана) в первом разряде регистра 44 сдвига устанавливается логическая 1. В результате чего на первом выходе блока 8 управления логическая 1, на всех остальных выходах устанавливается логический О. Импульс от блока 9 оптимизации, означающий окончание процесса поиска минимума квадрата амплитуды эквивалентного управления первого вибратора 17, поступает на первый вход блока 8 управления и, пройдя через схему ИЛИ 5, сдвигает содержимое регистра 44 сдвига. Логическая Г перемещается во второй разряд регистра 44 сдвига, на выходе инвертора 46 логический О. В результате логическая 1 устанавливается на втором и третьем выходах блока 8 управления. Логическая 1 с второго выхода разрешает работу блока 10 оптимизации, а блок 9 оптимизации отключается. Логическая 1 третьего выхода разрешает работу БИА 52. Следующий импульс, пришедший на второй вход блока 8 управления от блока 10 оптимизации, сдвигает логическую 1 регистра 44 сдвига в третий разряд, разрешая работу БИА 5з и т.д. Логическая Г из старшего разряда переписывается в первый, блок 10 оптимизации отключается, а блок 9 оптимизации включается в работу, и начинается новый цикл работы.
Блок 9(10) оптимизации (фиг.7) работает следующим образом.
В исходном состоянии RS-триггеры 51,
52находятся в нулевом состоянии. Счетчик
53и регистры 48 и 49 имеют во всех выходных разрядах логические О. Минимизируемый сигнал подается через первый вход блока 9(10) оптимизации на вход ГУН 7. Импульс А последовательности, поступающий на второй вход блока 9(10) оптимизации, проходит через схему И 59, если от блока 8 управления на третий вход блока 9(10) оптимизации подается логическая 1. В противном случае блок 9(10) оптимизации отключается. Этим импульсом цифровое значение минимизируемого сигнала записывается в один из регистров. Так, если Т-триггер 68 имеет на прямом выходе логическую 1, то значение запишется в регистр 48, в противном случае - в регистр 49.
Спустя время, гарантирующее надежную запись информации в регистр, на инверсном выходе схемы 64 задержки появится импульс, который перепишет информацию регистров 48 и 49 в соответствующие счетчики 54 и 55, а также импульсом с прямого выхода переключит RS-триггер 50 в логическую 1. Схема И -НЕ 60 начнет пропускать импульсы с ГТИ 69 на вычитающие
0 входы счетчиков 54 и 55. Так как в регистре 49 и счетчике 55 все логические О, то на выходе счетчика 55 сразу появится логический О, формирователь 63 импульсов установит RS-Tpnirep 52 в 1я, которая, пройдя
5 через схему ИЛИ 66, поступит на первый вход схемы И 57, а также переключит RS- триггер 50 в состояние О. Подача тактовых импульсов от ГТИ 69 прекратится. Входы D0 регистров 48 и 49 соединены с логической
0 Г(не показано), на выходах Q0 регистра48 логическая 1, а на выходах регистра 49 - О. Логический 0й на выходе схемы И 58 заблокирует работу схемы 67 равнозначности, на прямом выходе которой всегда будет
5 1, а на инверсном - О, если на втором входе О. В результате на выходе схемы И 57 логическая 1, Т-триггер 68 переключается в противоположное состояние. Так как на выходе RS-триггера 51 логический О, то
0 на выходах схемы И-НЕ 61 логическая 1, а на выходе схемы И 56 - О. Поэтому на втором выходе блока 9(10) оптимизации (выход схемы И 56) не появится импульс, означающий смену направления изменения
5 варьируемого параметра (частоты для блока 9 оптимизации или амплитуды для блока 10 оптимизации). Состояние счетчика 53 останется прежним. Логическая Г с выхода схемы ИЛИ 66 через схему 65 задержки пе0 реключает RS-триггеры 51 и 52 в состояние логического О.
Следующий за импульсом А последовательности импульс Б последовательности меняет варьируемый параметр, с приходом
5 второго импульса А последовательности новое значение минимизируемого сигнала запишется в регистр 49. На выходах Q0 обоих регистров 48, 49 все время будут логические 1 и схема И 58 разблокирует схему 67
0 равнозначности. Импульс А последовательности устанавливает RS-триггер 50 в состояние 1, и тактовые импульсы от ГТИ 69 поступают на вычитающие входы счетчиков 54 и 55, в которых находится информация с
5 регистров 48 и 49 соответственно.
Если новое записанное значение окажется меньше старого, то RS триггер 52 перейдет в состояние 1 быстрее, чем RS-триггер 51. На прямом выходе схемы 67 равнозначности будет логическая 1, на выходе схемы И 57 - 1. Т-триггер68 переключится в противоположное состояние, подготовив регистр 48 (с большим значением минимизируемого сигнала) к последующей записи. Логическая 1 с RS-триггера 52 переключит RS-триггер 50 и подача тактовых импульсов прекратится. Поскольку на инверсном выходе схемы 67 равнозначности логический О, на выходе схемы И 56 тоже О. Состояние счетчика 53 не изменится и импульса на втором выходе блока оптимизации не возникнет. Логическая Г с выхода схемы ИЛИ 66 через схему 65 задержки переключит триггеры 51 и 52 а исходное состояние.
Если окажется, что новое значение больше старого, т.е. направление изменения варьируемого параметра неверно, то быстрее переключится триггер 51 в состояние 1. На прямом выходе схемы 67 равнозначности О, схемы И 57 - О, Т-триггер 68 не переключается и следующее значение минимизируемого сигнала запишется на место большего значения. На инверсном выходе схемы 67 равнозначности 1, схемы И 56 - Г, которая добавит к содержимому счетчика 53 единицу и выработает импульс на втором выходе блока оптимизации. Спустя время задержки RS-триггер 51 переключится в состояние О.
Последующая работа блока 9(10) оптимизации будет проходить аналогично описанному. При этом каждый раз будет стираться информация о большем значении минимизируемого сигнала и меняться направление изменения варьируемого параметра, если новое значение оказывается больше старого. Если значения, записанные в регистры 48 и 49. окажутся равными (случай неверного первою шага и возврат в исходное состояние), то RS-триггеры 51 и 52 переключатся одновременно, на выходе схемы И-НЕ 61 логический О, который не позволит сменить направление изменения параметра.
Возле точки минимума будет наблюдаться смена направления изменения при каждом импульсе А последовательности. Для гарантированного поиска минимума таких смен должно быть 3-4. Как только счетчик 53 досчитает до 3 - 4, на его выходе и первом выходе блока 9(10) оптимизации появится сигнал, который подается на блок 8 управления и приводит к вариации по новому Ai для блока 10 оптимизации или к отключению для блока 9 оптимизации. Этот же сигнал обнуляет счетчик 53 и регистры 48 и 49, подготавливая блок 9(10) оптимизации к дальнейшей работе.
Способ определения собственных форм и частот испытуемого обьекта обеспечивает гарантированный поиск собственной частоты на заданной форме колебаний, что обь5 ясняется ярко выраженным экстремальным характером эквивалентных упрзвлений. Указанный способ полностью автоматизирован, обладает высокой скоростью сходимости и позволяет отыскивать все
10 собственные частоты.
Формула изобретения
1. Способ определения собственных
15 форм и чэ тот колебаний испытуемого объекта, заключающийся в том, что производят многоточечное возбуждение гармонических колебаний обьекта одинаковой частоты вибраторами, регистрируют параметры колеба0 ний, формируют сигналы управления для регулирования частоты всех и уровня возбуждения отдельных вибраторов, отличающийся тем, что. с целью повышения достоверности, измеряют квадраты амплитуд эк5 вивалентных управлений, затрачиваемых каждым вибратором вибромодуля на воспроизведения заданного колебания, изменяют частоту колебаний всех вибраторов до достижения минимума квадрата амплитуды
0 эквивалентного управления первого вибратора, после чего минимизируют сумму квадратов амплитуд эквивалентных управлений всех вибраторов последовательным изменением амплитуд колебаний второго 5 п-го вибраторов, начинают ноаый цикл поиска изменением частоты, процесс поиска продолжают до тех пор, пока приращения частоты и амплитуд колебаний от цикла к циклу не станут равными нулю,
0 2. Устройство для определения собственных форм и частот колебаний испытуемого обьекта, содержащее задающий генератор, п вибромодулей, регулируемый усилитель, п-1 блоков изменения амплиту5 ды, сумматор, первый и второй блоки оптимизации, блок изменения частоты, отличающееся тем. что оно снабжено генератором управляющих импульсов и блоком управления, первые выходы вибро0 модулей предназначены для соединения с испытуемым объектом, а вторые выходы через сумматор соединены с первым входом второго блока оптимизации, выход задающего генератора через прямой вход регули5 руемого усилителя соединен с первым входом первого вибромодуля, а через первые входы п-1 блоков изменения амплитуды с первыми входами остальных вибромодулей соответственно, первый выход генератора управляющих импульсов соединен с
вторыми входами всех блоков изменения эмплшуды и первым входом блока изменения частоты, а второй выход - с вторыми входами блоков оптимизации, первые выходы которых соединены с. соответствующими входами блока упрапления, выходы которого соединены г, вторым входом блока изменения частоты и третьим входом первого блока оптимизации, третим входом второго блока оптимизации, третьими входами второго - п-го вибромодулей соответственно, второй выход второго блока оптимизации соединен с четвертыми входами всех блоков изменения амплитуды, а первого блока оптимизации - с третьим входом блока изменения частоты, выход которого соединен с входом задающего генератора и вторыми входами всех вибромодулей, второй выход первого вибромодумя соединен с первым входом первого блока оптимизации, вход генератора управляющих импульсов соединен с формирователем команды Пуск.
3. Устройство по п.2, отличаю щее- с я тем. что вибромодуль содержит вибратор, датчик перемещения, закрепленный на подвижном органе вибратора, датчик тока подвижной обмотки вибратора, три сумматора, два блока дифференцирования, два квадратора, блок деления, релейный элемент и следящий фильтр, выходом соединенный непосредственно с первым квадратором, а через второй блок дифференцирования - с первым входом блока деления, втброй вход которого, обьединенный с вторым входом следящего фильтра, является вторым входом вибромодуля, выход блока деления через второй квадратор соединен с первым входом тре гьего сумматора, второй вход которого соединен с выходом первого квадратора, а выход является вторым выходом вибромодуля, первый вход вибромодуля соединен с первым входом первого сумматора, второй вход которого соединен с выходом датчика перемещения, а выход непосредственно и через первый блок дифференцирования соединен с первым и вторым входами второго сумматора, выход которого через релейный элемент соединен с входом вибратора, выход датчика тока соединен с первым входом следящего филыра, а выход вибратора через датчик перемещения является первым выходом вибромодуля.
4. Устройство по п.2, отличающее- с я тем, что генератор управляющих им- Нульсов содержит генератор тактовых импульсов, три схемы И, регистр сдвига и RS-триггер, выход которого через первый вход третьей схемы И соединен с первым выходом генератора управляющих импульсов, выход генератора тактовых импульсов соединен с первым входом первой схемы И, второй вход которого является пусковым, а выход соединен со счетным входом регистра
и вторыми входами второй и третьей схем И, второй выход регистра соединен с первым входом второй схемы И, третий - с третьим входом третьей схемы И, четвертый - с R-вхо- дом RS-триггера, S-вход которого соединен с
выходом второй схемы И, являющимся вторым выходом генератора управляющих им- пульсов.
,5. Устройство по п.2, отличающее- с я тем, что Ьлок изменения амплитуды содержит блок изменения уровня, регулируемый усилитель, коммутатор, инвертор. Т-триггер, схему ИЛИ, формирователь импульсов, выходом соединенный с первым входом схемы ИЛИ и через Т-триггер - с
третьим входом коммутатора, первый вход которого непосредственно, а второй через инверторсоединены с первым входом блока изменения амплитуды, выход коммутатора через прямой вход регулируемого усилителя
соединен с выходом блока изменения амплитуды, третий вход которого соединен с вторым входом блока изменения уровня, второй - с первым входом этого блока, а - четвертый через второй вход схемы ИЛИ третьим входом блока изменения уровня, четвертый вход которого соединен с пятым входом блока изменения амплитуды, а первый и второй выходы - с управляющим входом регулируемого усилителя и входом
формирователя импульсов соответственно.
6.Устройство по п.2, отличающее- с я тем, что блок управления содержит регистр сдвига, инвертор и схему ИЛИ, входы которой являются входами блока управления, а выход соединен со счетным входом регистра, первый выход которого является соответствующим выходом блока управления и соединен с инвертором, выход которо- ° го является вторым выходом блока
управления, второй - n-й выходы регистра являются третьим - (п+1)-м выходами блока управления соответственно.
7.Устройство по п.2, отличающее- 0 с я тем, что блок оптимизации содержит
аналого-цифровой преобразователь, первый и второй регистры, три RS-триггера, три счетчика, четыре схемы И. две схемы И-НЕ. два формирователя импульсов, две схемы 5 задержки, схему ИЛИ. схему равнозначности, Т-триггер, генератор тактовых импульсов, выходом соединенный с первым входом первой схемы , второй вход которой соединен с выходом первого RS- триггерэ, а выход - с вычитающими входами
первого и второго счетчиков, Р-еыходы которых через соответств/ющие формирователи импульсов соединены с S-входами второ о и третьего RS-триггеров соответственно, выход второго RS-триггера соединен с первыми входами схемы ИЛИ, второй схемы И-НЕ и схемы равнозначности, выход третьего RS-триггера соединен с вторыми входами схемы ИЛИ и второй схемы И-НЕ, выход которой соединен с первым входом первой схемы И, ее второй вход, объединенный с вторым входом второй схемы И, входом второй схемы задержки и R-входом первого RS-триггера. соединен с выходом схемы ИЛИ. а третий вход - с инверсным выходом схемы равнозначности, прямой выход которой через первый вход второй схемы И соединен с входом Т-триггера. выходы которого соединены с входами SoS, первого и второго регистров соответствен- но, второй вход схемы равнозначности сое динен с прямым выходом Т-триггера. а третий вход - с выходом третьей схемы И, входы которой соединены с выходами 00 первого и второго регистров соответствен- но. Qi - Or выходы которых соединены с соответствующими входами соответствующих счетчиков, первый и второй входы четвертой схемы И соединены с вторым и третьим входами блока оптимизации соот- ветственно. а выход этой схемы соединен с С-входами регистров и входом первой схемы задержки, инверсный выход которой соединен с С-входами первого и второго счетчиков, а прямой - с S-входом первого RS- триггера, выход второй схемы Задержки соединен с R-входами второго и третьего RS-триггеров, выход первой схемы И, являющийся вторым выходом блока оптимизации, соединен с С-входом третьего счетчика, выход которого, являющийся первым выходом блока оптимизации, соединен с R-входами третьего счетчика и регистров, первый - n-й входы регистров поразрядно соединены с выходами аналого-цифрового преобразователя, вход которого является первым входом блока оптимизации.
8. Устройство по п.5, отличающее- с я тем, что блок изменения уровня содержит Т-триггер, две схемы И- НЕ, реверсивный счетчик, цифроанэлоговый преобразователь и схему И, первый и второй входы которой явлчются соответствующими оходами блока изменения уровня, а выход соединен с первыми входами схем И-НЕ, вторые входы которых соединены с соответствующими выходами Т-триггера, а выходы - с входами+1 и -1 реверсивного счетчика, выходы которого порязрядно соединены с входами цифроана- логового преобразователя , выход которого является первым выходом блока изменения уровня, а Р-выход реверсивного счетчика - его втооым выходом, вход Т-триггера и входные разряды реверсивного счетчика являются соответственно .третьим и четвертым входами блока изменения уровня.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения частотной характеристики испытуемого объекта и устройство для его осуществления | 1984 |
|
SU1223074A1 |
| Вибрационный источник сейсмических сигналов | 1983 |
|
SU1138772A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА КАНАЛОВ РАДИОСВЯЗИ | 2014 |
|
RU2563145C1 |
| Устройство для пуска синхронной @ -фазной машины | 1990 |
|
SU1823119A1 |
| Устройство для управления электродвигателем переменного тока | 1984 |
|
SU1457141A1 |
| УСТРОЙСТВО КОРРЕКЦИИ ФОРМЫ КРИВОЙ НАПРЯЖЕНИЯ | 2014 |
|
RU2580944C1 |
| ТРЕХФАЗНЫЙ БЕСТРАНСФОРМАТОРНЫЙ НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 2020 |
|
RU2758443C1 |
| УСТРОЙСТВО КОРРЕКЦИИ НАПРЯЖЕНИЯ | 2016 |
|
RU2625351C1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
Изобретение относится к виброиспытательной технике и может быть использовано при вибрационных испытаниях протяженных конструкций в машиностроении и приборостроении. Для расширения области применения и автоматизации поиска собственных форм и частот колебаний при испытаниях сложных протяженных конструкций их проводят до достижения одновременного минимума всех эквивалентных управлений, затрачиваемых каждым вибратором на обеспечение заданных параметров колебаний. Процесс поиска осуществляется итте- рационно. Генератор управляющих импульсов с помощью блока управления вызывает изменение частоты всех п вибраторов вибромодулей с помощью блока изменения частоты и задающего генератора, а амплитуда колебаний каждого вибратора осуществляется регулируемым усилитjflCM и n-t блоком изменения амплитуды. Эквивалентные управления измеряются и суммируются в сумматоре. Первый блок оптимизации минимизирует амплитуду эквивалентного управления первого вибратора вариацией частоты колебаний. Второй блок оптимизации минимизирует сигнал сумматора последовательным изменением амплитуд колебаний п-1 вибраторов. Процесс поиска заканчивается г)ри близких к нулю вариациях амплитуды. 2 с. и б з.п. ф-лы. 7 ил. Ё
Фиг. I
r- eo о -j)
X
I f
45
44
Фм.6
Г
Редактор В Дамко
Фиг. 7
Составитель И.Рекунова Техред М.МоргенталКорректор Л.Бескид
i
0,
Ж
Ж
Ж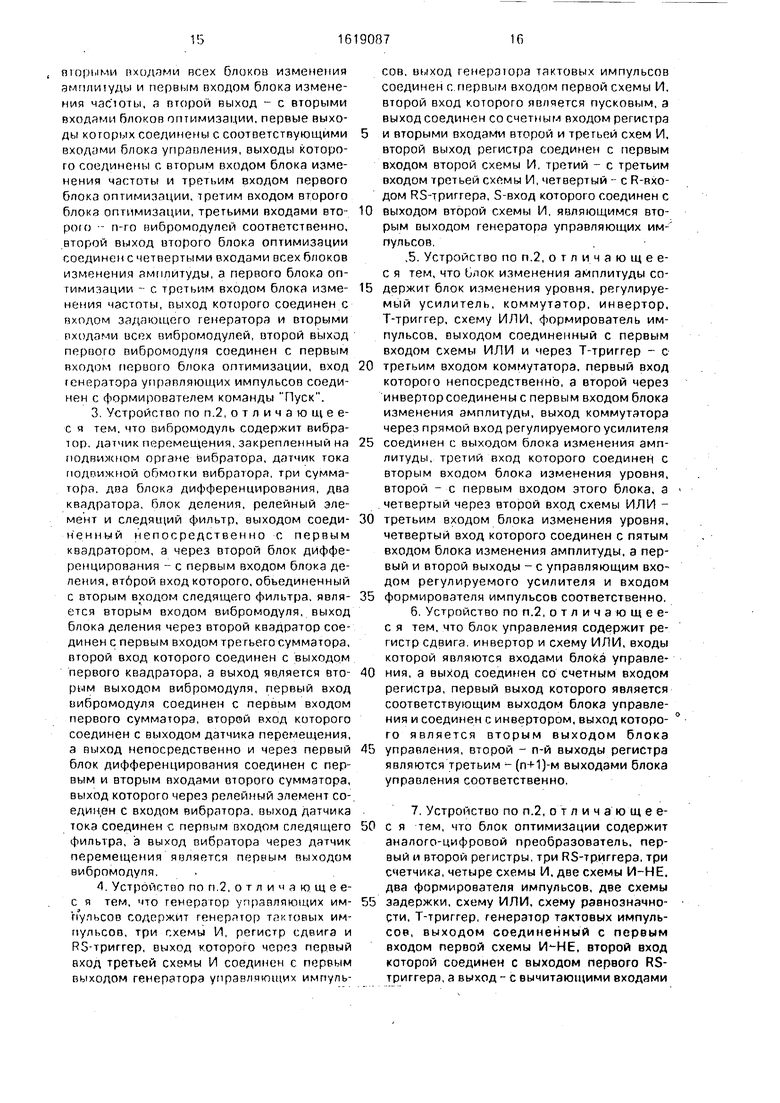
| Микишев Г.Н | |||
| Экспериментальные методы в динамике космических аппаратов | |||
| М.: Машиностроение, 1978 | |||
| с | |||
| Переносное устройство для вырезания круглых отверстий в листах и т.п. работ | 1919 |
|
SU226A1 |
| Способ вибрационных испытаний сложной конструкции и устройство для его осуществления | 1976 |
|
SU739976A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
