Изобретение относится к измерительной технике и может быть использовано при контроле параметров электромеханических сервоприводов, поведе-j ние которых аппроксимируется уравне- ниями колебательного звена.
Целью изобретения является увеличение информативности контроля параметров затухающего колебательного процесса и колебательного звена за счет определения частоты и фазы затухающего колебательного процесса и постоянной времени колебательного звена при одновременном повышении точности определения относительнрго коэффициента затухания колебательного звена.
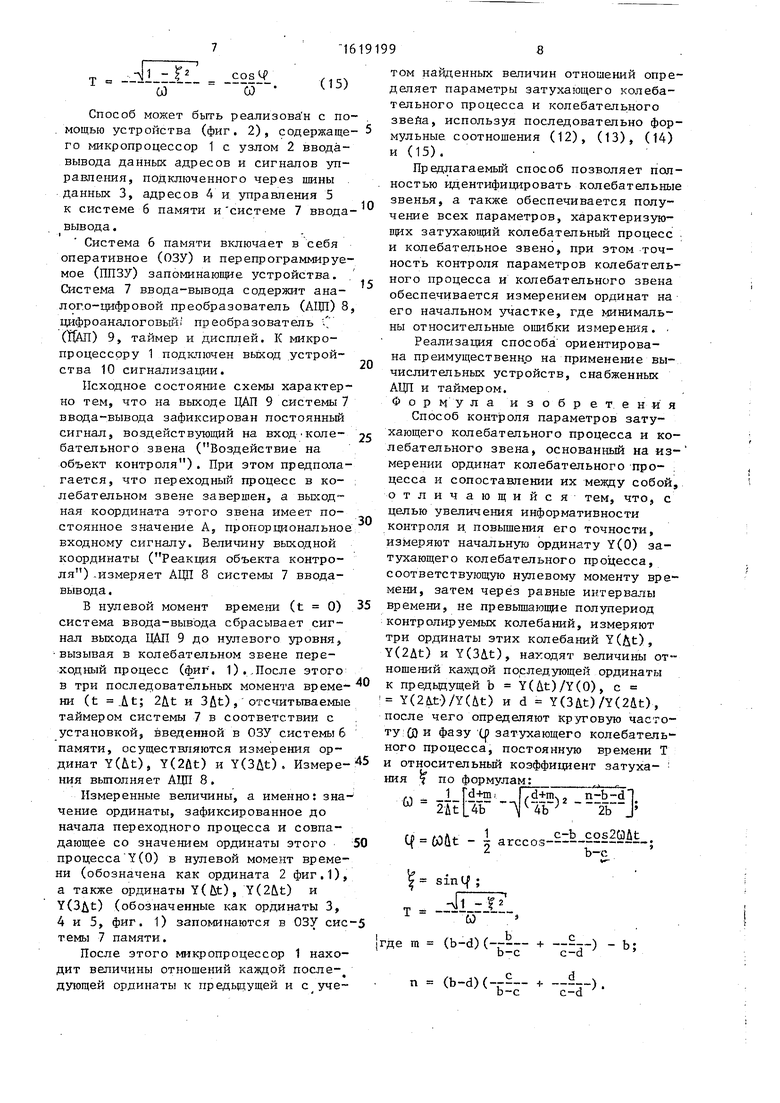
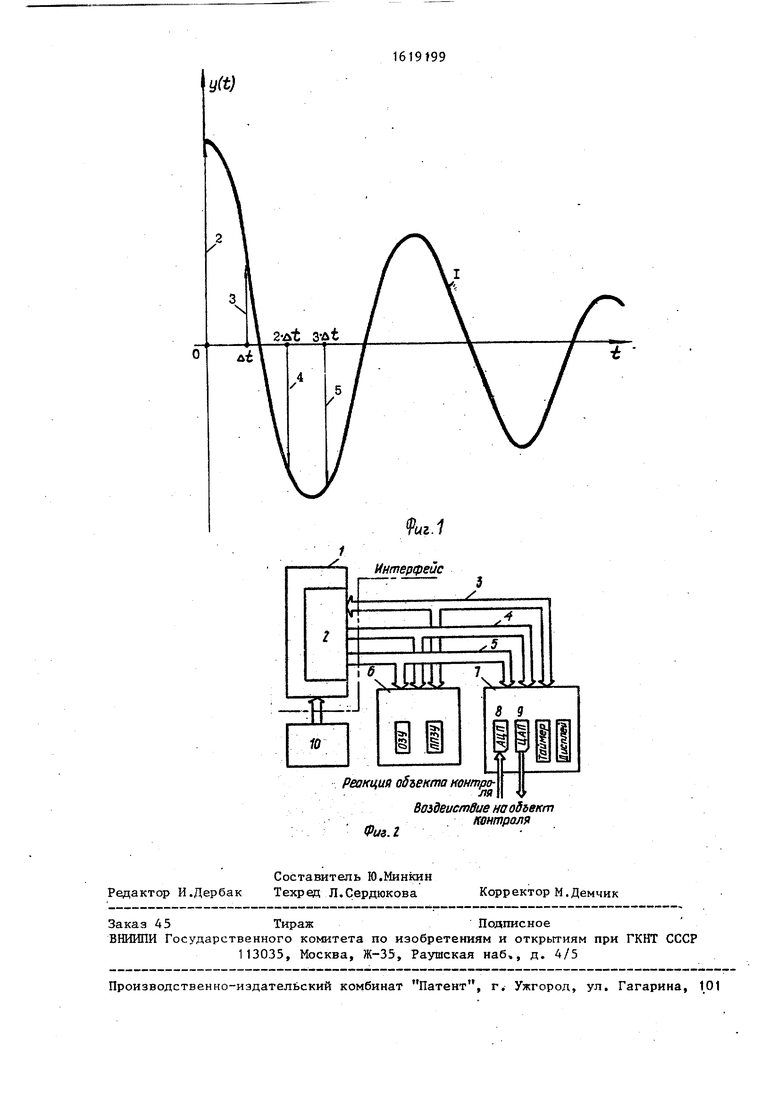
На фиг, 1 представлен график зату,- хающего колебательного процесса; на
фиг. 2 - схема тстройства, осуществляющего предлагаемый способ.
Аналитическое представление затухающего колебательного процесса имеет вид
4
оэ
Y(t) A где Y(t)
cos (C0t -Cf)s(1)
-лИ -Г
текущее значение затухающего колебательного процесса;
t - время;
А - константа, определяемая величиной постоянного входного воздействия на колебательное звено и его статическим коэффициентом усиления, т.е. значение затухающего колебательного
со
со
Т W(P)
3161 199
процесса в нулевой момент времени;
постоянная времени колебательного звена, описываемого передаточной функцией
К
де К - коэффициент усиления;
Т - постоянная времени;
- относительный коэффициент затухания;
Р - комплексная переменная;
W - круговая частота;
Ц - фазовый угол, ричем
10
15
СО
лГГ-Г т
(2)
(ь - d) (T--- +
b-c
J-).
c-d }
/. ,лк-n сC-b-OOs260ut
( - 0,5 arccos,
b-c
- sin(f;
|t -f. T .
В нулевой и последующие моменты времени (t 0; ut; 2ut; ЗД) COOT- ветствующие ординаты колебательного процесса могут быть представлены согласно соотношению (1) следующими вы- р ажениями:
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для диагностики технического состояния гидропривода | 1986 |
|
SU1401167A2 |
| Прибор для демонстрации колебаний пружинного маятника | 1991 |
|
SU1770972A1 |
| СПОСОБ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНОГО КОЭФФИЦИЕНТА ДЕМПФИРОВАНИЯ КОЛЕБАТЕЛЬНОЙ СИСТЕМЫ ВТОРОГОПОРЯДКА | 1969 |
|
SU248812A1 |
| Устройство для определения динамических характеристик материалов | 1985 |
|
SU1283570A1 |
| Устройство для измерения параметров параллельных и последовательных колебательных контуров | 1980 |
|
SU875308A1 |
| Способ формирования тягового усилия в поляризованной электромагнитной системе | 1990 |
|
SU1836597A3 |
| Способ настройки на резонансные колебания вибромашины с кусочно-линейной характеристикой упругих связей | 1985 |
|
SU1351696A1 |
| Устройство для определения параметров переходного процесса | 1976 |
|
SU607191A1 |
| Устройство для диагностики технического состояния объемного гидропривода | 1985 |
|
SU1288388A1 |
| Устройство для измерения затухания колебаний в системах с турбулентным трением | 1988 |
|
SU1539682A1 |
Изобретение относится к измерительной технике и может быть использовано при контроле параметров электромеханических сервоприводов, режим работы которых аппроксимируется уравнениями колебательного эвена. Цель изобретения - увеличение информативности контроля параметров затухающего колебательного процесса и колебательного звена - достигается путем определения частоты и фазы затухающего колебательного процесса и постоянной времени колебательного звена при одновременном повышении точности определения относительного коэффициента затухания колебательного звена. Способ позволяет полностью идентифицировать колебательные звенья, обеспечивая получение всех параметро, характеризующих затухающий колебате ь- ный процесс и колебательное звен. Реализация способа ориентирована преимущественно на применение вьчисли- тельных устройств, снабженных аналого-цифровыми преобразователем и таймером. 2 ил. I
Способ контроля параметров затухающего колебательного процесса и колебательного звена осуществляют следующим образом.
Измеряют значения Y(0) ординаты 2 кривой 1 затухающего колебательного процесса Y(t) (фиг. 1), затем измеряют значения Y(ut), Y(2&t) и Y(3ut) ординат 3, 4, 5 соответственно. Интервал времени At назначают таким, чтобы он не превышал половины периода затухающего колебательного процесса.
Далее находят отношение каждой последующей ординаты к предыдущей:
Y(it) У(ОГ
d
с
Y(3At) (2АО
Y(24t)
T(At)
после чего определяют круговую частоту СО , фазовый угол П затухающего колебательного процесса, относительный коэффициент затухания Ј и постоянную времени Т колебательного звена по формулам
U
1
arccos
Г d + т
L Tb
|/----i-2- 2 .
V 4b )2b j
е тип- параметры, функционально зависящие только от величин Ь, с и d, т.е. от отношений ординат затухающего переходного процесса:
п (Ь - d) (----e-za-) - ь;
5
5
0
5
0
5
Отсюда следует, что: Y(At)-Т Л.
b у(5Г - е
Y(2At) Y(At) cos(2W4t -М) cos(
-1-At
cosput t).
ros(f
с
е
Y(34t) У(2Щ
-I-.
d где b, end-
cos(3j bt-l|) cos(2Qut-tfT
выражения, характари- зуюпще отношение соответствующей последующей ординаты к предыдущей.
Разрешая каждое из этих выражений относительно общей экспотенциальной составляющей, получают зависимости:
-T ui: b1cos cP
(COUt - jf)
c- cosfclit -() (2Qbt -if) cos(2u)) cos( -tf)
ти
b -coscp-cos Qut -C|) c cos2(OAt- -U));(4)
516191996
c-costoit - Cf)-cos(3COAt - l|) Используя данное обозначение, пре d-cos2 (2QAt -t|);(5)образуют уравнение (11) к виду:
2d-cos2Wbt - b cos4wit + mcos2W&t b-costf cos(30)ut -Cp ) d Cos(Wit- 5 n.
-If).cos(2a4t -If).(6)используя соотношение (8), осуществляют в этом выражении подстановки: Используя известные соотношения
тригонометрии, получают11о/л -.
10cos2W&t -7j- + 2 cus2Wut;
со s cos ft -г- cos(rt + ft) +
+ cos(o( - ft) ;(7)Cos4(0bt 2cosZ - 1
1тогда
соз об -(1 + cos2oO,(8) 15
cos22tvAt - --0T---cos2(i)ut - /b
где Об и ft - угловые величины.n - b - d
преобразуют выражения (4) и (5)
к виду:
20 Решая это квадратное уравнение,
cos(2ait - 2Ц) .(9) получают
co8(4Mt - 2(f) JblЈ2S2 4tL (1Q)Cos2aut 25 ,2 С учетом соотношения (7) из выра- j 4b2b
жения (6) следует:
;Отсюда следует формула для опредеb cos36)it + cos(3W4t - 2(j)) ления Ч УГОВОЙ частотыW :
d cosWAt + cos(3C04t - 2ф.30 00 arccos(--2™ Умножая последнее выражение .2 n -
costiJit и учитьшая соотношения (9) и)| 4Ъ2Ь
(8), получают выражение:, .
Располагая выражениям (12), можно
(Ь - d) cos(4COit - 2(р + cos(2Q&t- J5 определить, например, непосредствен- 2d.cos2W&t - b cos4Wbt +но из соотношения (9) выражение, опт -1 u -ределяющее фазовый угол (f :
+ cos20At,
. 1 ЈZ 3 cЈ§2oJit 04
Используя в левой части получение- 40 Lf-Wut - - arccos --U- ;
го вьфажения зависимости (9) и (10),
получают уравнение: №H определения относительного кор jjэффициента затухания рассматривают
2d-cos2t)ht - b-cos4c04t + I ( +вьфажение (3). Используемая в правой
1ддчасти этого выражения константа А
+ -Ј--)(ъ - d) - bl.cos2ttAt (b-d)/есть начальная ордината затухания коc-d J лебательного процесса, т.е. А Y(0).
jСледовательно из выражения (3) выX (г + rZj) (t1)текает соотношение, определяющее отуCQ носительный коэффициент затухания :
Принимают, что sinW.(14)
f, JN / bc t „.Значение постоянной времени коле о - и) г+ А) - о - т,
о-сс-аN бательного звена, однозначно зависяjщее от круговой частоты ьЭ затухающе(Ь - d) (-г-+;-) - n,го колебательного процесса и относиЬ-сс-а,4
тельного коэффициента затухания
где тип- функции отношений орди-колебательного звена, определяется
нат Ь, с, d. выражения (2):
CO
1619199 (15)
Способ может быть реализован с помощью устройства (фиг. 2), содержащего микропроцессор 1 с узлом 2 ввода- вывода данных адресов и сигналов управления, подключенного через шины данных 3, адресов 4 и управления 5 к системе 6 памяти и системе 7 ввода- вывода .
t
Система 6 памяти включает в себя оперативное (ОЗУ) и перепрограммируемое (ППЗУ) запоминающие устройства. Система 7 ввода-вывода содержит аналого-цифровой преобразователь (АЦП) 8, цифроаналоговый преобразователь . (ЦАП) 9, таймер и дисплей. К микропроцессору 1 подключен выход устройства 10 сигнализации.
Исходное состояние схемы характерно тем, что на выходе ЦАП 9 системы 7 ввода-вывода зафиксирован постоянный сигнал, воздействующий на вход колебательного звена (Воздействие на объект контроля). При этом предполагается, что переходный процесс в колебательном звене завершен, а выход™ ная координата этого звена имеет постоянное значение А5 пропорциональное входному сигналу. Величину выходной координаты (Реакция объекта контроля) измеряет АЦП 8 системы 7 ввода- вывода .
В нулевой момент времени (t 0) система ввода-вывода сбрасывает сигнал выхода ЦАП 9 до нулевого уровня, вызывая в колебательном звене переходный процесс (фиг. 1). После этого в три последовательных момента време ни (t it; 2&t и 3fit) , отсчитываемые таймером системы 7 в соответствии с установкой, введенной в ОЗУ системы 6 памяти, осуществляются измерения ординат Y(ut), Y(2ut) и Y(3ut) . Измерения выполняет АЦП 8.
Измеренные величины, а именно: значение ординаты, зафиксированное до начала переходного процесса и совпадающее со значением ординаты этого процесса Y(0) в нулевой момент времени (обозначена как ордината 2 фиг.1), а также ординаты Y( &t) , Y(2ut) и Y(3ut) (обозначенные как ординаты 3, 4 и 5, фиг. 1) запоминаются в ОЗУ сие темы 7 памяти.
После этого микропроцессор 1 находит величины отношений каждой после- дующей ординаты к предыдущей и С(уче
8
0
5
0
5
0
5
0
5
0
том найденных величин отношений определяет параметры затухающего колебательного процесса и колебательного звейа, используя последовательно формульные соотношения (12), (13), (14) и (15).
Предлагаемый способ позволяет полностью идентифицировать колебательные звенья, а также обеспечивается получение всех параметров, характеризующих затухающий колебательный процесс и колебательное звено, при этом точность контроля параметров колебательного процесса и колебательного звена обеспечивается измерением ординат на его начальном участке, где минимальны относительные ошибки измерения.
Реализация способа ориентирована преимущественнр на применение вычислительных устройств, снабженных АЦП и таймером. Формула изобретения
Способ контроля параметров затухающего колебательного процесса и колебательного звена, основанный на измерении ординат колебательного процесса и сопоставлении их между собой, отличающийся тем, что, с целью увеличения информативности контроля и повышения его точности, измеряют начальную ординату Y(0) затухающего колебательного процесса, соответствующую нулевому моменту времени, затем через равные интервалы времени, не превышающие полупериод контролируемых колебаний, измеряют три ординаты этих колебаний Y(&t), Y(2At) и Y(3u.t), находят величины отношений каждой последующей ординаты к предыдущей b Y(ut)/Y(0), с Y(2fct)/Y(it) и d Y(3ut)/Y(2ut), после чего определяют круговую частоту СО и фазу (о затухающего колебатепь- ного процесса, постоянную времени Т и относительный коэффициент затухания If по формулам:аа
П - 1 f 4™ |7l +nN П-Ь-dl
Ы 2AtL4b МЬ ; 2b J
,. ,.л. 1 с-Ь cos2QAt Cf &0ut - 5 агссоз,;
b-c
ij sinLf ;
T
CO
{где га (b-d) (----- + ----) - b;
1h-r r--H
b-c
c-d
n(b.d) (.Ј, Jr).
Реакция объекта контроЛ ля|
Воздействие наодъект . „.контроля
Фиг. Z
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ЗАТУХАНИЯ КОЛЕБАТЕЛЬНЫХ ПРОЦЕССОВ | 1964 |
|
SU169819A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
