Данное изобретение относится к области самонастраивающихся систем автоматического управления.
Известные способы измерения относительного коэффициента демпфирования колебательных систем второго порядка не применимы в случае наложения на координату шумовых помех.
Предложенный способ отличается от известных тем, что формируют сигнал, пропорциональный кратковременной взаимно корреляционной функции между регулируемым сигналом, искаженным шумовой помехой, и производной регулируемого сигнала, искаженной шумовой помехой, измеряют задержки, соответствующие первому положительному и первому отрицательному максимумам корреляционной функции, и оценивают величину отношения второй задержки к первой.
Это обеспечивает повышение точности измерения в условиях действия на регулируемый сигнал и его производную шумовых помех.
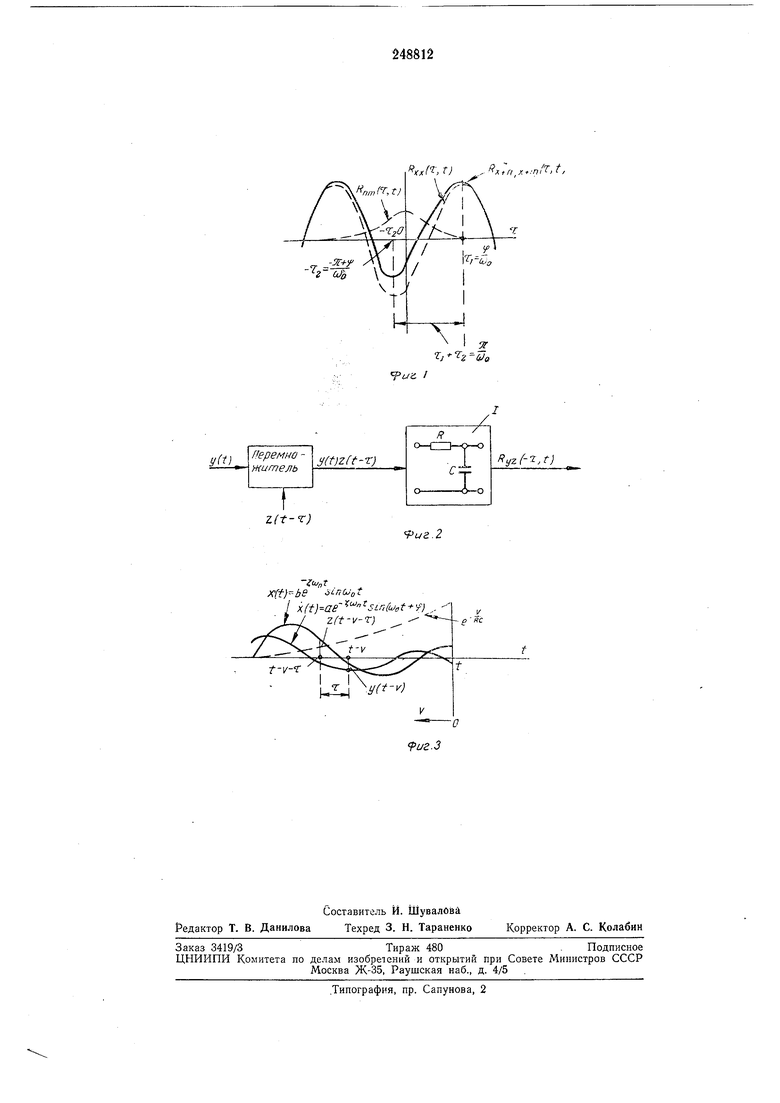
На фиг. 1 изображены взаимно корреляционные функции сигнала, его производной и помех, где
Rxx(,f)-взаимно корреляционная фуик. ция полезных сигналов
Rnm( }-взаимно корреляционная функция шумовых помех n(t), tn(t), наложенных соответственно на x(t),.(t)Rx-tn, ,v-;m(,0- взаимНО корреляционная функция суммарных сигналов x( n(t) и x(t)(f).
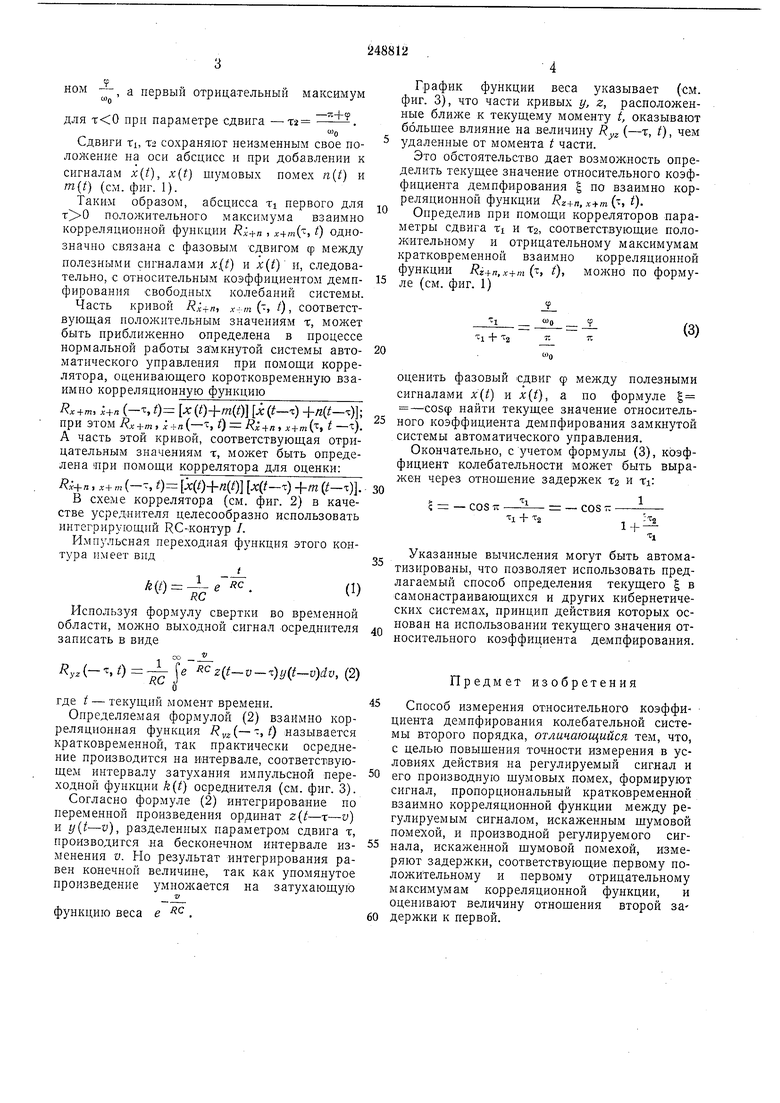
На фиг. 2 изображена схема коррелятора. Здесь у, г - коррелируемые сигналы. На фиг. 3 изображен вид сигнала и его производной.
Пусть поведение системы описывается дяфферепциальиым уравнением второго порядка вида
+ 2 ; + lx о,
где I - коэффициент демпфирования; (1)„-частота свободных колебаний.
Пусть сигналы x(t) и x(t) представляют собой затухающие синусоиды одной и той частоты соо, причем x(t} З1п() опережает x(t) sm&ot по фазе на угол Ф, зависящий от ср ( - - cos ср).
Здесь а, b - начальные амплитуды колебаний. ном - а первый отрицательный максимум для при параметре сдвига -Т2 ---. Сдвиги Ть 1-2 сохраняют неизменным свое положение на оси абсцисс и при добавлении к сигналам x(t), x(t) шумовых помех n(t) и m{t} (см. фиг. 1). Таким образом, абсцисса TI первого для положительного максимума взаимно корреляционной функции , (, о однозначно связана с фазовым сдвигом ф между полезными сигнала.ми x{t} и x(t} и, следовательно, с относительным коэффициентом демпфирования свободных колебаний системы. Часть кривой Rx+n, х,т (, О) соответствующая положительным значениям т, может быть нриближенно определена в процессе нормальной работы замкнутой системы автоматического управления при помощи коррелятора, оценивающего коротковременную взаимно корреляционную функцию R.+m, -..п (-, 0 л: (t}+m(f) {X ( +я(/-т); при этом ,;+л(-, t} (t t-т:). А часть этой кривой, соответствующая отрицательным значениям т, может быть определена ири помощи коррелятора для оценки: , .+ «(-, t) WO-f й(/) ) +m (-т). В схеме коррелятора (см. фиг. 2) в качестве усреднителя целесообразно использовать интегрирующий RC-контур I. Импульсная переходная функция этого контура имеет вид Используя формулу свертки во временной области, можно выходной сигнал осреднителя записать в виде 1 ° - - ,.(-.0 Ге RCz(t-v-)y(t-v)dv, (2) RC J где / - текущий момент времени. Определяемая формулой (2) взаимно корреляционная функция Куг(- О называется кратковременной, так практически осреднение производится на интервале, соответствующем интервалу затухання импульсной переходной функции k(t) осреднителя (см. фиг. 3). Согласно формуле (2) интегрирование по переменной произведения ординат z(t-т-У) и y(t-t), разделенных параметром сдвига т, производится .на бесконечном интервале изменения V. Но результат интегрирования равен конечной величине, так как упомянутое произведение умиолсается на затухающую функцию веса е . График функции веса указывает (см. фиг. 3), что части кривых у, z, расположенные ближе к текущему моменту t, оказывают большее влияние на величину Ry... (-т, /). чем удаленные от момента t части. Это обстоятельство дает возможность онределить текущее значение относительного коэффициента демпфирования , по взаимно корреляционной функции , ,v-fm (. ООпределив при помощи корреляторов параметры сдвига TI и Т2, соответствующие положительному и отрицательному максимумам кратковременной взаимно корреляционной функции Rz+n,x + m ( t), МОЖНО ПО формуле (см. фиг. 1) оценить фазовый одвиг ф между нолезными сигналами x(t) и x(t), а по формуле | -соБф найти текущее значение относительного коэффициента демпфирования замкнутой системы автоматического управления. Окончательно, с учетом формулы (3), коэффициент колебательности может быть выражен через отношение задержек Т2 и TI: ; - cos ic - COSУказанные вычисления могут быть автоматизированы, что позволяет использовать предлагаемый способ определения текущего | в самонастраивающихся и других кибернетических системах, принцип действия которых основан на использовании текущего значения относительного коэффициента демпфирования. Предмет изобретения Способ измерения относительного коэффициента демпфирования колебательной системы второго порядка, отличающийся тем, что, с целью повышения точности измерения в условиях действия на регулируемый сигнал и его производную шумовых помех, формируют сигнал, нропорциональный кратковременной взаимно корреляционной функции между регулируемым сигналом, искаженным шумовой помехой, и производной регулируемого сигнала, искажениой шумовой помехой, измеряют задержки, соответствующие первому положительному и первому отрицательному максимумам корреляционной функции, и оценивают величину отношения второй задержки к первой.
t-v-r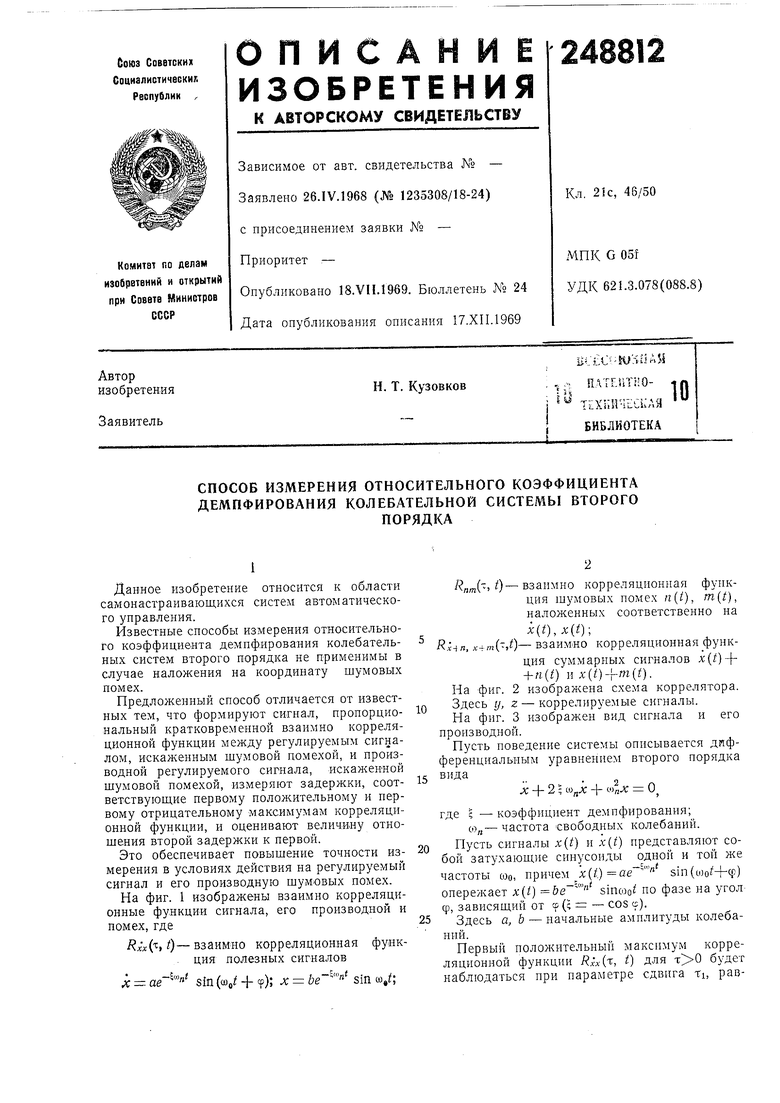
| название | год | авторы | номер документа |
|---|---|---|---|
| Корреляционный способ измерения расхода электропроводных жидкостей и двухфазных сред и устройство для его осуществления | 1980 |
|
SU901829A1 |
| СПОСОБ И УСТРОЙСТВО АКУСТИЧЕСКОГО ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2589290C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ | 2012 |
|
RU2497285C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2426167C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ УЗКОПОЛОСНЫХ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2007 |
|
RU2367970C2 |
| Способ обработки псевдошумового сигнала в гидролокации | 2020 |
|
RU2739478C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ В ВИДЕ ЗВУКОРЯДА НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2011 |
|
RU2464588C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОЙ ТОЧНОЙ ЯДЕРНОЙ МАГНИТНО-РЕЗОНАНСНОЙ СПЕКТРОСКОПИИ / МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ, ОСНОВАННОЙ НА ПРИНЦИПАХ КВАНТОВОЙ ТЕОРИИ | 2008 |
|
RU2531140C2 |
| РАДИОЛОКАЦИОННЫЙ ПЕЛЕНГАТОР ЛОКАЛИЗОВАННЫХ ОБЪЕКТОВ | 2014 |
|
RU2580830C1 |