Изобретение относится к машиностроению, а именно к механическим приводам, содержащим зубчатые передачи, и может быть использовано в планетарных зубчатых механизмах различного назначения.
Цель изобретения - снижение динамических нагрузок, вызываемых накопленной погрешностью шага установленного с возможностью радиального смещения центрального колеса планетарного механизма путем установки на центральном колесе компенсирующего груза, рассчитанного в зависимости от накопленной погрешности шага на и изгибной жесткости приводного вала.
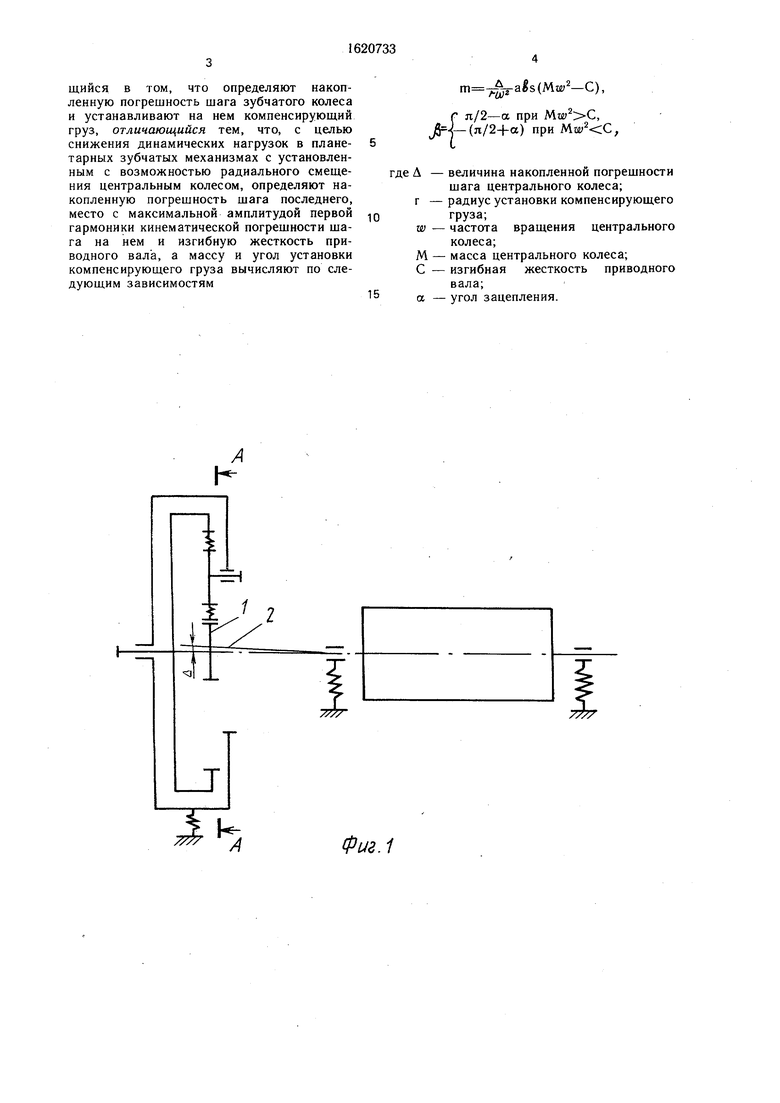
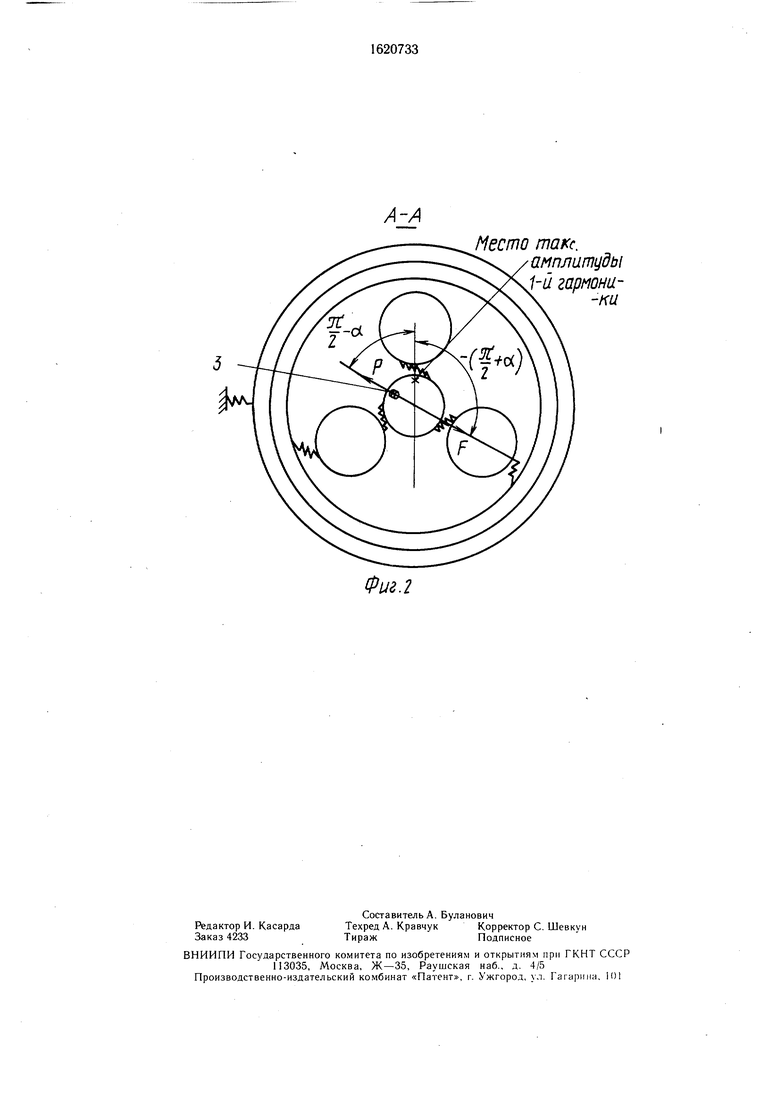
На фиг. 1 изображена схема зубчатого механизма сприводом, на фиг. 2 - разрез А-А на фиг. 1,.
Зубчатый механизм, реализующий указанный способ, содержит установленное с возможностью радиального смещения центральное колесо 1, приводной вал 2 и компенсирующий груз 3.
Можно показать, что при работе механизма геометрический центр, а следовательно, центр масс колеса 1 смещен относительно оси вращения на величину накопленной погрешности шага А колеса 1 под углом (л/2+а) относительно места с максимальной амплитудой первой гармоники кинематической погрешности колеса 1. Положительное направление угла р совпадает с направлением вращения, а - угол зацепления. Вследствие этого смещения на колесо 1 действует центробежная сила и противоположно направленная реакция приводного вала , где М - масса колеса 1, w - частота вращения, С - изгибная жесткость вала 2.
Результирующая этих сил (May2-С) может быть компенсирована установкой на колесо 1 компенсирующего груза 3, создающего равную по величине и противоположно направленную центробежную силу
(Мш2-С),
где m и г - масса и радиус установки компенсирующего груза.
Отсюда легко определяется масса компенсирующего груза.
Формула изобретения
Способ компенсации погрешностей зацепления в зубчатом механизме, заключаю§
(Л
оэ ic
о 1
со со
щийся в том, что определяют накопленную погрешность шага зубчатого колеса и устанавливают на нем компенсирующий груз, отличающийся тем, что, с целью снижения динамических нагрузок в планетарных зубчатых механизмах с установленным с возможностью радиального смещения центральным колесом, определяют накопленную погрешность шага последнего, место с максимальной амплитудой первой гармоники кинематической погрешности шага на нем и изгибную жесткость приводного вала, а массу и угол установки компенсирующего груза вычисляют по следующим зависимостям
т 7Ага1§(Мш2-С), л/2-а при ,
Г л/2-а г j54-(n/2+a
) при ,
где А - величина накопленной погрешности
шага центрального колеса; г - радиус установки компенсирующего
груза; w - частота вращения центрального
колеса;
М - масса центрального колеса; С - изгибная жесткость приводного
вала; a - угол зацепления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарный редуктор силовой установки | 2017 |
|
RU2655968C1 |
| Способ компенсации накопленной погрешности шага зубчатых колес | 1988 |
|
SU1613896A1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ С СИСТЕМОЙ КОМПЕНСАЦИИ ИНЕРЦИОННЫХ СИЛ (ВАРИАНТЫ) | 1998 |
|
RU2141043C1 |
| Способ балансировки зубчатого механизма | 1975 |
|
SU578573A1 |
| Способ компенсации погрешностей зацепления зубчатых колес | 1980 |
|
SU887833A1 |
| ПРИВОДНОЙ КИНЕМАТИЧЕСКИЙ УЗЕЛ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2114766C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ШЕСТЕРЕН И КОНТРОЛЯ СБОРКИ ИЗ НИХ МНОГОПОТОЧНЫХ ВЕРТОЛЕТНЫХ РЕДУКТОРОВ | 2002 |
|
RU2236341C1 |
| Планетарный редуктор | 2015 |
|
RU2614430C1 |
| ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2264553C1 |
| СООСНЫЙ ПОДУЗЕЛ ТРАНСМИССИЯ/ЦЕНТРАЛЬНАЯ ВТУЛКА УЗЛА НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2108269C1 |
Изобретение относится к машиностроению, а именно к механическим приводам, содержащим зубчатые передачи, и может быть использовано в планетарных зубчатых механизмах различного назначения. Цель изобретения - снижение динамических нагрузок, вызываемых накопленной погрешностью шага установленного с возможностью радиального смещения центрального колеса планетарного механизма. На центральном колесе устанавливают компенсирующий груз, массу и угол установки которого определяют в зависимости от накопленной погрешности шага центрального колеса и изгибной жесткости приводного вала. 2 ил.
А
К
1Лг
Фиг.1
Место такс.
амплитуды
и гармони- -ки
Фиг.2
| Способ балансировки зубчатого механизма | 1975 |
|
SU578573A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
