Изобретение относится к измерительной технике, к определению положения объектов.
Цель изобретения - повышение точно- сж и надежности измерений за счет снижения чувствительности устройства к деформации системы в целом.
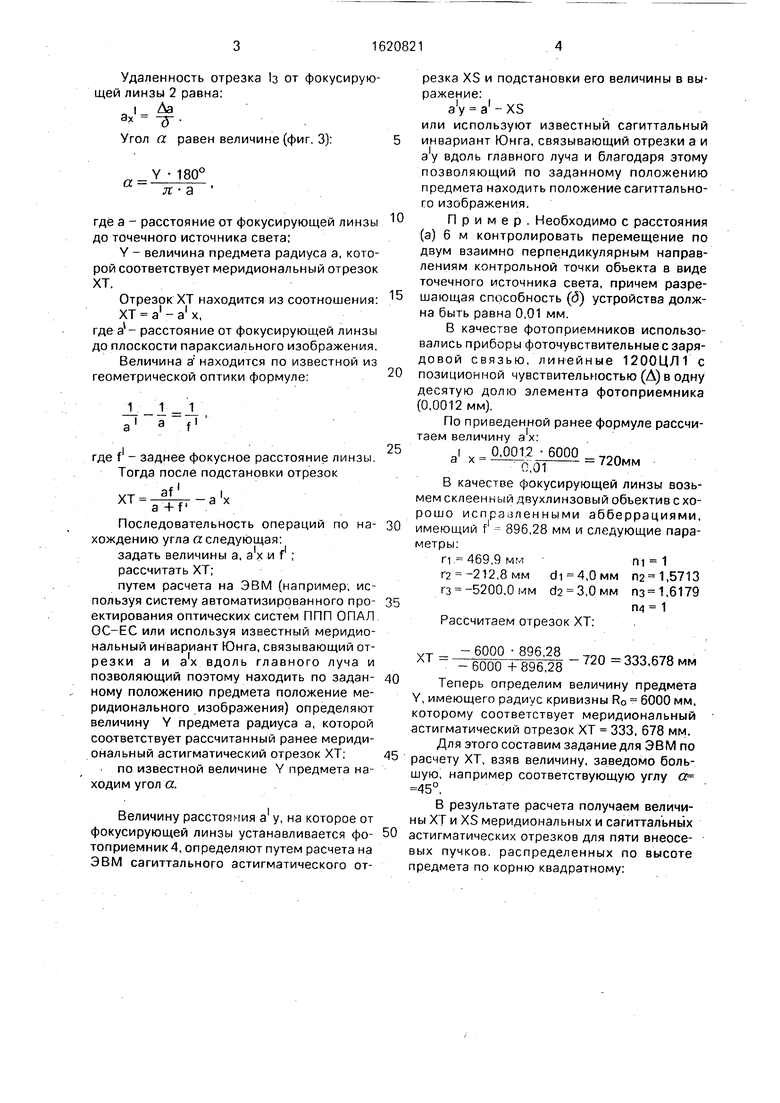
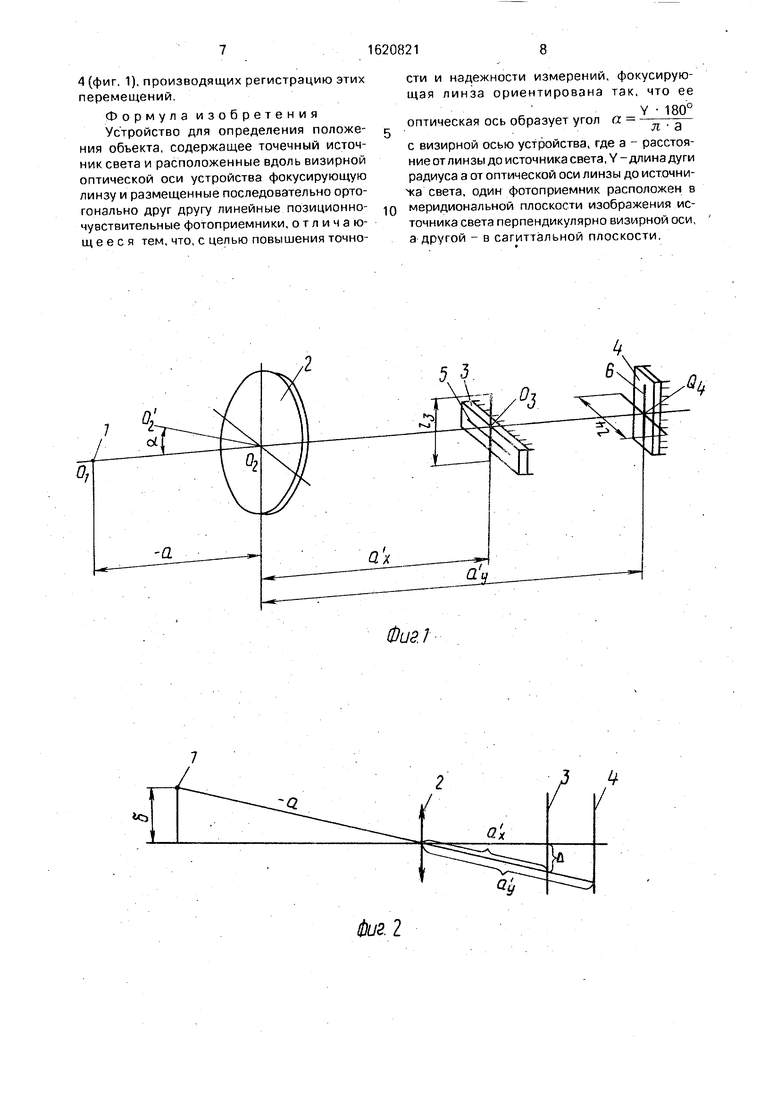
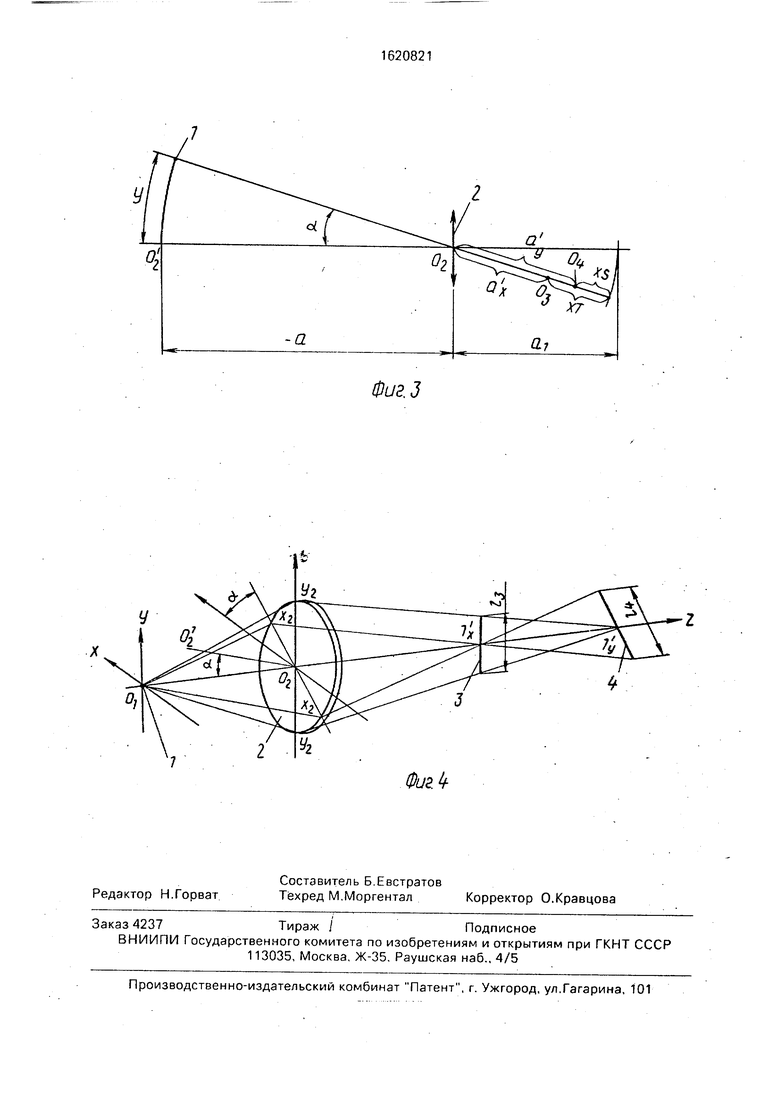
На фиг. 1 представлена схема устройства для определения положения объекта; на фиг. 2 - графическое изображение схемы измерений; на фиг. 3 - схема, поясняющая нахождение величины угла а; на фиг. 4 - схема, поясняющая формирование двух изображений источника света в виде отрезков прямой линии.
Устройство (фиг, 1) содержит точечный источник 1 света, расположенный на визирной оси (Oi-0/i) устройства, на расстоянии а от него закреплена фокусирующая линза 2, оптическая ось ( ) которой составляет с визирной осью устройства угол а, и два фотоприемника 3 и 4, выполненных в виде линейной фогочувстоитяльной схемы, например с зарядовой связью, светочувствительные области 5 и 6 которых расположены соответственно в плоскостях меридионального и сагиттапьного изображений источника света перпендикулярно этим изображениям (отрезкам Ь и ti).
Отрезок fo удален от линзы 2 на расстояние (фиг. 2), определяемое заданной разрешающей способностью д устройства. Разрешающая способность д устройства связана с позиционной чувствительностью линейной фоточувствительной схемы следующей зависимостью:
сл
с
S
ю о
00
ю
д
Я1
а х
где д - разрешающая способность устройства;
А- позиционная чувствительность линейной фоточувствительной схемы;
а - расстояние междуточечным источником света 1 и фокусирующей линзой 2;
а х - расстояние от фокусирующей линзы 2 до отрезка h
Удаленность отрезка 1з от фокусирующей линзы 2 равна:
э Да ах - -д-.
Угол сс. равен величине (фиг. 3):
а
Y 180°
л а
где а - расстояние от фокусирующей линзы до точечного источника света;
Y - величина предмета радиуса а, которой соответствует меридиональный отрезок XT.
Отрезок XT находится из соотношения:
XT а1 - а1 х,
где а1- расстояние от фокусирующей линзы до плоскости параксиального изображения.
Величина а находится по известной из геометрической оптики формуле:
1
JL
f1
,1
где f - заднее фокусное расстояние линзы. Тогда после подстановки отрезок
af
ХТ
-а х
a +f
Последовательность операций по нахождению угла «следующая:
задать величины а, а х и f1 ;
рассчитать XT;
путем расчета на ЭВМ (например, используя систему автоматизированного проектирования оптических систем ППП ОПАЛ ОС-ЕС или используя известный меридиональный инвариант Юнга, связывающий отрезки а и ах вдоль главного луча и позволяющий поэтому находить по заданному положению предмета положение меридионального изображения) определяют величину Y предмета радиуса а, которой соответствует рассчитанный ранее меридиональный астигматический отрезок XT;
по известной величине Y предмета находим угол а.
Величину расстояния а1 у, на которое от фокусирующей линзы устанавливается фотоприемник 4, определяют путем расчета на ЭВМ сагиттального астигматического отрезка XS и подстановки его величины в выражение:
a y al-XS или используют известный сагиттальный
инвариант Юнга, связывающий отрезки а и а у вдоль главного луча и благодаря этому позволяющий по заданному положению предмета находить положение сагиттального изображения.
Пример. Необходимо с расстояния
(а) 6 м контролировать перемещение по двум взаимно перпендикулярным направлениям контрольной точки объекта в виде точечного источника света, причем разрешающая способность ((5) устройства должна быть равна 0,01 мм.
В качестве фотоприемников использовались приборы фоточувствительные с заря- довой связью, линейные 1200ЦЛ1 с
позиционной чувствительностью (А) в одну десятую долю элемента фотоприемника (0,0012 мм).
По приведенной ранее формуле рассчи
таем величину ах:
0,0012 -6000
а х .
0,01
720мм
В качестве фокусирующей линзы возьмем склеенный двухлинзовый объектив с хорошо исправленными абберрациями, имеющий f 896,28 мм и следующие параметры:
П 469,9 ммщ 1
г2 -212,8мм ,Омм 02 1,5713 гз -5200,0 мм d2 3,OMM пз 1,6179 1
Рассчитаем отрезок XT:
XT
6000 896,28
- 720 333,678 мм
- 6000 + 896,28 Теперь определим величину предмета
Y, имеющего радиус кривизны R0 6000 мм, которому соответствует меридиональный астигматический отрезок XT 333, 678 мм. Для этого составим задание для ЭВМ по расчету XT, взяв величину, заведомо большую, например соответствующую углу 2 45°.
В результате расчета получаем величины ХГ и XS меридиональных и сагиттальных астигматических отрезков для пяти внеосе- вых пучков, распределенных по высоте предмета по корню квадратному:
Видно, что необходимой нам величине XT соответствует предмет размером меньше 2980, 37524 мм ( а 28°. 46). Задавшись
теперь меньшей величиной предмета, например Y 2827, 433 мм (а 27°), произведем вычисление. В результате получим: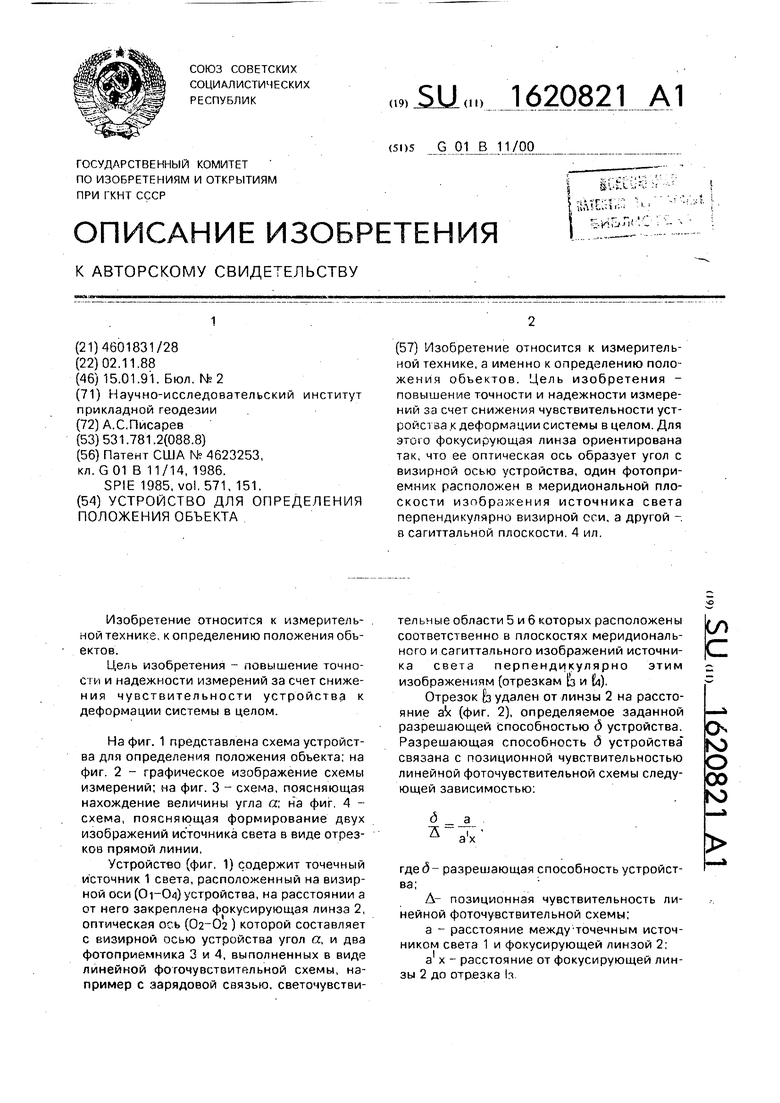

| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХЛИНЗОВЫЙ ОБЪЕКТИВ | 2008 |
|
RU2384868C1 |
| Оптическая система линейного развертывающего устройства | 1990 |
|
SU1784937A1 |
| АВТОКОЛЛИМАЦИОННОЕ УГЛОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2012 |
|
RU2491586C9 |
| ОКУЛЯР | 2005 |
|
RU2302024C1 |
| ЗЕРКАЛЬНО-ЛИНЗОВЫЙ ОБЪЕКТИВ (ВАРИАНТЫ) | 2011 |
|
RU2461030C1 |
| ПОЛЯРИЗАЦИОННЫЙ ИНТЕРФЕРОМЕТР | 2004 |
|
RU2275592C2 |
| ОБЪЕКТИВ | 2002 |
|
RU2239212C2 |
| ДВУХЛИНЗОВЫЙ ОБЪЕКТИВ | 2016 |
|
RU2633445C1 |
| ОКУЛЯР С ВЫНЕСЕННЫМ ЗРАЧКОМ | 2015 |
|
RU2585892C1 |
| ГРАДИЕНТНАЯ ЛИНЗА | 2005 |
|
RU2289830C1 |
Изобретение относится к измерительной технике, а именно к определению положения объектов. Цель изобретения - повышение точности и надежности измерений за счет снижения чувствительности уст- ройст аа к деформации системы в целом. Для этою фокусирующая линза ориентирована так, что ее оптическая ось образует угол с визирной осью устройства, один фотоприемник расположен в меридиональной плоскости изображения источника света перпендикулярно визирной сей, а другой - в сагиттальной плоскости.4 ил.
I
Из результатов расчета следует, что необходимая величина XT (берется ХТ 333,678 для сохранения заданной разрешающей способности 6 устройства) соответствует величине предмета Y 2528,93 мм. Подставляя это числовое значение в приведенную формулу, находим
2528,93 180°
а 3,141 6000
24С
Именно такой угол должна составлять оптическая ось фокусирующей линзы с визирной осью устройства. Первый фотоприемник должен быть установлен на расстоянии:
а х a1 -XT 1053,67 - 327,75 725, 92 мм.
Второй фотоприемник устанавливается на расстоянии:
а у а - XS 1053,67 - 173,42 880,25 мм
Устройство работает следующим образом.
От точечного источника 1 света (фиг. 4) исходит расходящийся пучок лучей, падающий на поверхность фокусирующей линзы 2. Ввиду того, что оптическая ось фокусирующей линзы составляет с визирной осью устройства угол а. условия прохождения лучей в плоскостях XOZ и YOZ будут различными. Главный луч, относительно которого симметрично располагаются остальные лучи, не проходит через центр кривизны оптической поверхности, поэтому поверхность для этого пучка лучей имеет в направлениях ХзХа и Y2Y2 различные радиусы кривизны: гХа & rY2. Выходящий волновой фронт, соот ветствующий этому пучку лучей, перестает
быть сферическим. При этом лучи пучка, расположенные в плоскостях XOZ и YOZ, пересекаются с главным лучом в различных точках: 1 х и 1 у. Поперечное сечение пучка в промежутке между линзой и точкой 1 х
имеет форму эллипса, большая ось которого, расположена в плоскости YOZ, вследствие того, что лучи Х9 1 х (правый и левый), которые дблжны пересечься в точке 1 х, сближаются более быстро чем лучи yal y (верхний и
нижний), которые пересекаются в более далекой точке 1 у.
У точки 11 х поперечное сечение пучка вырождается в отрезок прямой линии, расположенной в плоскости YOZ, так как лучи Х2 11
X (правый и левый) пересекаются друг с другом и главным лучом в этом сечении, в то время как лучи Y2 11 у (верхний и нижний) должны встретиться в точке 11 у, а в данном сечении они еще находятся на некотором
расстоянии друг от друга.
Аналогично поперечное сечение пучка лучей у точки 11 у превращается в отрезок прямой линии, расположенной в плоскости XOZ. Происходит это потому, что лучи Ха 11 х
после их пересечений в точке 1 х на протяжении пути 1 х/1 у успевают несколько разойтись, поменявшись при этом местами: луч, бывший до точки 1 х левым, становится после точки 1 х правым и наоборот. При перемещении контролируемой точки с укрепленным на ней точечным источником света по направлениям X и Y происходит перемещение отрезков з и Ц по светочувствительным областям линейных позици- онно-чувствительных фотоприемников 3 и
4 (фиг. 1), производящих регистрацию этих перемещений.
Формула изобретения Устройство для определения положения объекта, содержащее точечный источник света и расположенные вдоль визирной оптической оси устройства фокусирующую линзу и размещенные последовательно ортогонально друг другу линейные позиционно- чувствительные фотоприемники, отличающееся тем, что, с целью повышения точно
сти и надежности измерений, фокусирующая линза ориентирована так, что ее
Y 180° оптическая ось образует угол а --
Л 3
с визирной осью устройства, где а - расстояние от линзы до источника света, Y-длина дуги радиуса а от оптической оси линзы до источника света, один фотоприемник расположен в меридиональной плоскости изображения источника света перпендикулярно визирной оси, а другой - в сагиттальной плоскости.
Фив.1
Ьиг.1
У2
Фиг.З
| Патент США № 4623253, кл.С01 В 11/14, 1986 | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
