Изобретение относится к робототехнике и может быть использовано при создании приводов промышленных роботов
Целью изобретения является повышение точности позиционирования робота за счет компенсации влияния упругостей в звеньях манипулятора
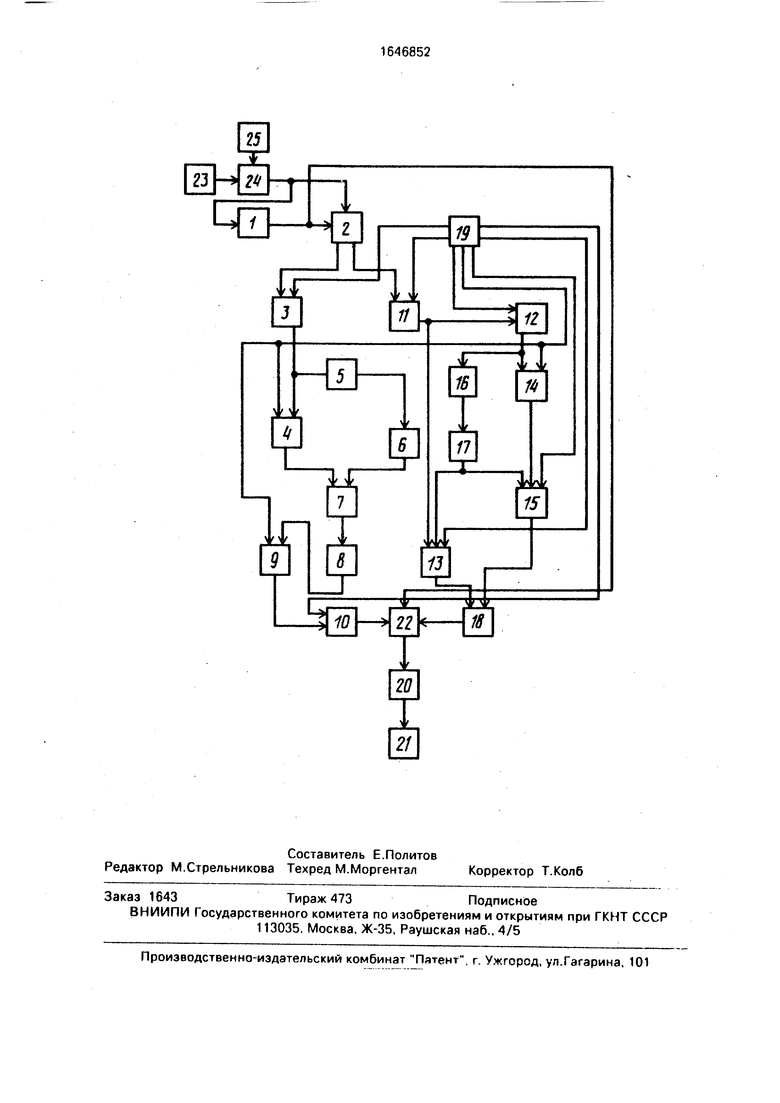
На чертеже дана функциональная схема устройства.
Устройство содержит пороговый элемент 1, первый ключ 2, первый блок 3 деления, первый сумматор 4, первый инвертор 5, первый нелинейный элемент6, первый блок 7 умножения, второй инвертор 8. второй сумматор 9, второй блок 10 умножения, третий сумматор 11, второй блок 12 деления. третий блок 13 умножения, четвертый сумматор 14, четвертый блок 15 умножения третий инвертор 16, второй нелинейный элемент 17, пятый сумматор 18 задатчик 19 сигналов, привод 20, исполнительный орган 21, второй ключ 22, таймер 23 третий ключ 24 и генератор 25.
Устройство работает следующим образом.
Привод 20. включающий электродвигатель постоянного тока с независимым возбуждением, отрабатывает закон управления, подаваемый на обмотку якоря электродвигателя в виде изменяющегося во времени напряжения, формируемого блоками 1 - 19 22 - 25 Благодаря тому что при выводе оптимального закона управления учитывается влияние упругости в звеньях манипулятора робота, позиционирование манипулятора из начального положения в заданное конечное положение осуществляется с высокой точностью при сохранении максимального быстродействия. Указанный закон управления имеет вид
-t/r,
W1 (t) -I(1 +t/n)J.
- (t - 1)/Г2 (t) D () + (t - t«)
( - t)/T2 -f (J) (t) I(t - t) ,
где d) (t) - изменение скорости на уччстке разгона манипулятора.
Г
o& (t) - изменение скорости на участке торможения манипулятора;
t - время движения манипулятора;
t - время перехода к торможению;
т - постоянная времени разгона;
Га - постоянная времени торможения;
uJb - номинальная скорость манипулятора;
(т.) - значение скорости в момент
торможения;
выходов задатчика 19 снимаются значения
ft (t) - значение ускорения в момент торможения.
В момент начала движения манипулятора одновременно включаются таймер 23, который производит отсчет времени движе- ния, и генератор 25, который вырабатывает линейно нарастающий пропорционально текущему времени сигнал напряжения. Ключ 24 пропускает этот сигнал до времени окончания процесса позиционирования, определяемого командой с таймера 23, на вход ключа 2. Пороговый элемент 1 настраивается на величину, соответствующую значению времени перехода к торможению. Пока текущее время не достигло этой вели- чины, ключ 2 коммутирует сигнал с генератора 25 со своим первым выходом, который задействует блоки 3-10, формирующие закон изменения скорости на участке разгона манипулятора. После достижения сигнала с генератора 25 значения, соответствующего времени перехода к торможению, ключ 2 коммутирует сигнал с генератора 25 со своим вторым выходом, который задействует блоки 11 - i8, формирующие закон измене- ния скорости на участке торможения манипулятора. Синхронно с ключом 2 работает ключ 22, коммутирующий по очереди блоки 3-10и11-18с входом привода 20. Поскольку время срабатывания ключей 2 и 22 много меньше постоянной времени электропривода привода 20, то оно не вносит погрешности в процесс управления. С семи
постоянных величин, равных соответствен но 1; - TI; тг й (t); wi (t).
Экспоненциальные функции реализуются на блоках 6 и 17 нелинейных функций. В результате в каждый момент времени на вход привода 20 поступает соответствующий управляющий сигнал, формирующий оптимальную траекторию движения испол
5
10
20
5 545
50
55
нительного органа 21, обеспечивающую повышенную точность позиционирования.
При этом для различных конструкций роботов будут различными только заданные в задатчике 19 постоянные коэффициенты. Формула изобретения Устройство для управления приводом робота, содержащее привод, пять сумматоров, три инвертора, четыре блока умножения и задатчик сигналов, отличающее- с я тем, что, с целью повышения точности позиционирования, оно дополнительно содержит два ключа, два нелинейных элемента, два блока деления, генератор и последовательно соединенные таймер, третий ключ и пороговый элемент, выход которого подключен через последовательно соединенные первый ключ, первый блок деления, первый инвертор, первый нелинейный элемент, первый блок умножения, второй инвертор, второй сумматор, второй блок умножения и второй ключ к входу привода и непосредственно к второму входу второго ключа, выход генератора соединен с вторым входом третьего ключа, подключенного выходом к второму входу первого ключа, второй выход которого подключен через последовательно соединенные третий сумматор, второй блок деления, третий инвертор, второй нелинейный элемент, третий блок умножения и пятый сумматор к третьему входу второго ключа, первый выход задатчика сигналов соединен с вторым входом первого блока деления, второй выход - с вторым входом третьего сумматора, третий выход - с вторым входом второго блока деления, четвертый выход - с вторым входом первого, второго и четвертого сумматоров, пятый выход - с вторым входом четвертого блока умножения, шестой выход - с вторым входом третьего блока умножения, а седьмой выход - с вторым входом второго блока умножения, второй вход первого сумматора подключен к выходу первого блока деления, а выход - к второму входу первого блока умножения, выход второго блока деления соединен с вторым входом четвертого сумматора, выход третьего сумматора подключен к третьему входу третьего блока умножения, а выход нелинейного элемента соединен с третьим входом четвертого блока умножения, выход которого подключен к второму входу пятого сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления положением объекта | 1987 |
|
SU1409975A1 |
| Система управления положением объекта | 1989 |
|
SU1620996A2 |
| Устройство управления манипулятором робота | 2018 |
|
RU2701459C1 |
| Устройство для управления приводом манипулятора | 1990 |
|
SU1821356A1 |
| Устройство для разгона и торможения электропривода | 1989 |
|
SU1725183A1 |
| Устройство для разгрузки звена руки робота | 1990 |
|
SU1779580A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ | 2010 |
|
RU2453891C1 |
| Устройство для определения оптимального периода технического состояния изделия | 1990 |
|
SU1767510A1 |
| СИЛОКОМПЕНСИРУЮЩИЙ ЭЛЕКТРОПРИВОД СБАЛАНСИРОВАННОГО МАНИПУЛЯТОРА | 2011 |
|
RU2454694C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССЕЯНИЯ ЭНЕРГИИ И СОБСТВЕННОЙ ЧАСТОТЫ МЕХАНИЧЕСКОЙ КОЛЕБАТЕЛЬНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2025685C1 |
Изобретение относится к робототехнике и может бо(ть использовано при создании приводов промышленных роботов. Целью изобретения является повышение точности позиционирования робота за счет компенсации влияния упругостей в звеньях манипулятора Для этого в устройство дополнительно введены два блока деления, два нелинейных элемента, три ключа, генератор, пороговый элемент и таймер, обеспечивающие выработку оптимального по быстродействию закона управления приводом 1 ил
| Система управления положением объекта | 1987 |
|
SU1409975A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
