a w
л-л
Изобретение относится к текстильной промышленности, касается многозевного ткацкого станка с приводом на постоянных магнитах для пр,.. кладчиков уточных нитей и позволяет повысить надежность его работы, износостойкость и снизить шум«, Каждый приводной сегмент 16 содержит устройство 30 подъема для соответствующего прокладчика 9, фиксируемого с помощью магнитов 26 и 27 на поверхности сегментов 16. Управление подъемным устройством осуществляется автоматически в зависимости от пройденного пути управляющим кулачком 35. При этом прокладчик 9 отрывается от поверхности сегмента 16 с расположенными на ней магнитами и переходит на бердо 10. 6 з.п„ ф-лы, 6 ил. г (Л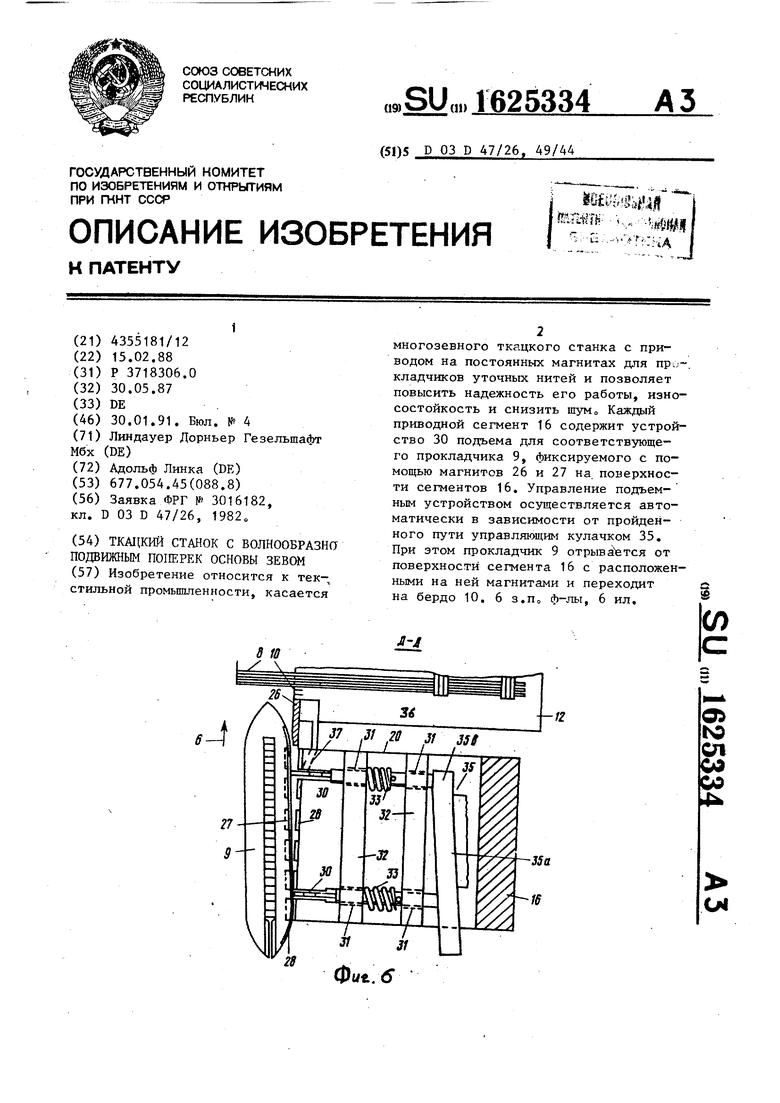
Фие. 6
--1Z
о to
СП
со
СО Јь
о
Изобретение относится к многозевному ткацкому станку с приводом на постоянных магнитах для прокладчиков уточных нитей„
Цель изобретения - повышение надежности в работе, снижение шума и повышение износостойкости.
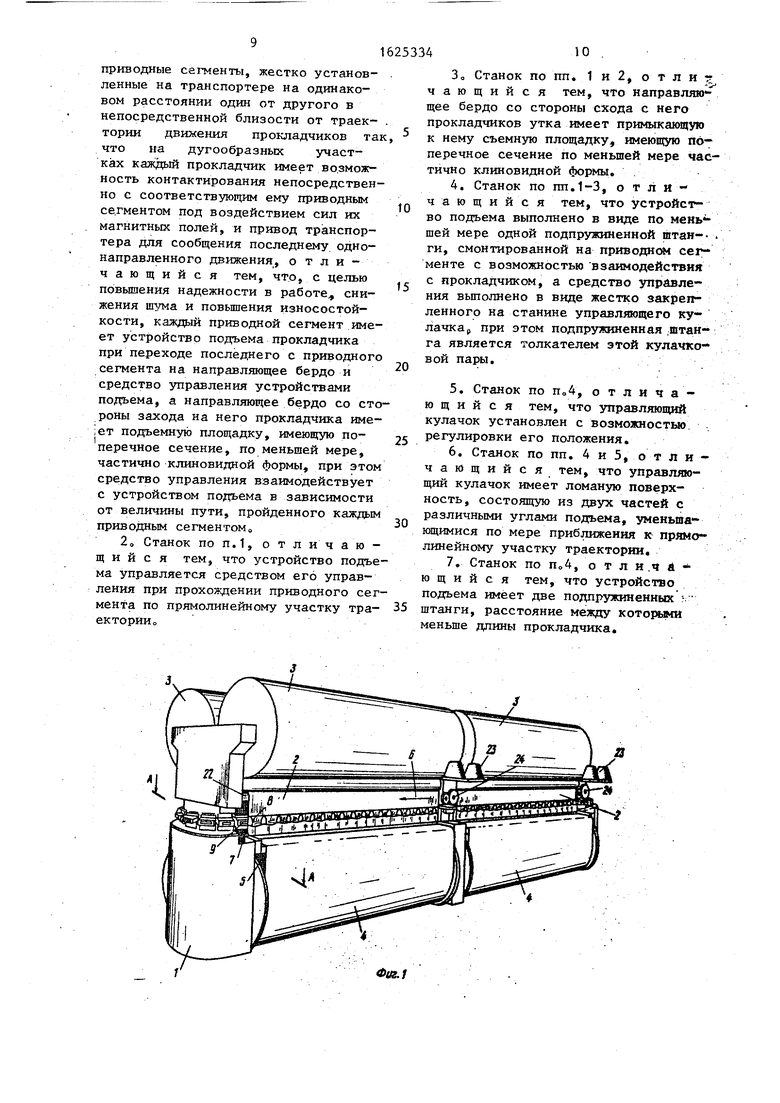
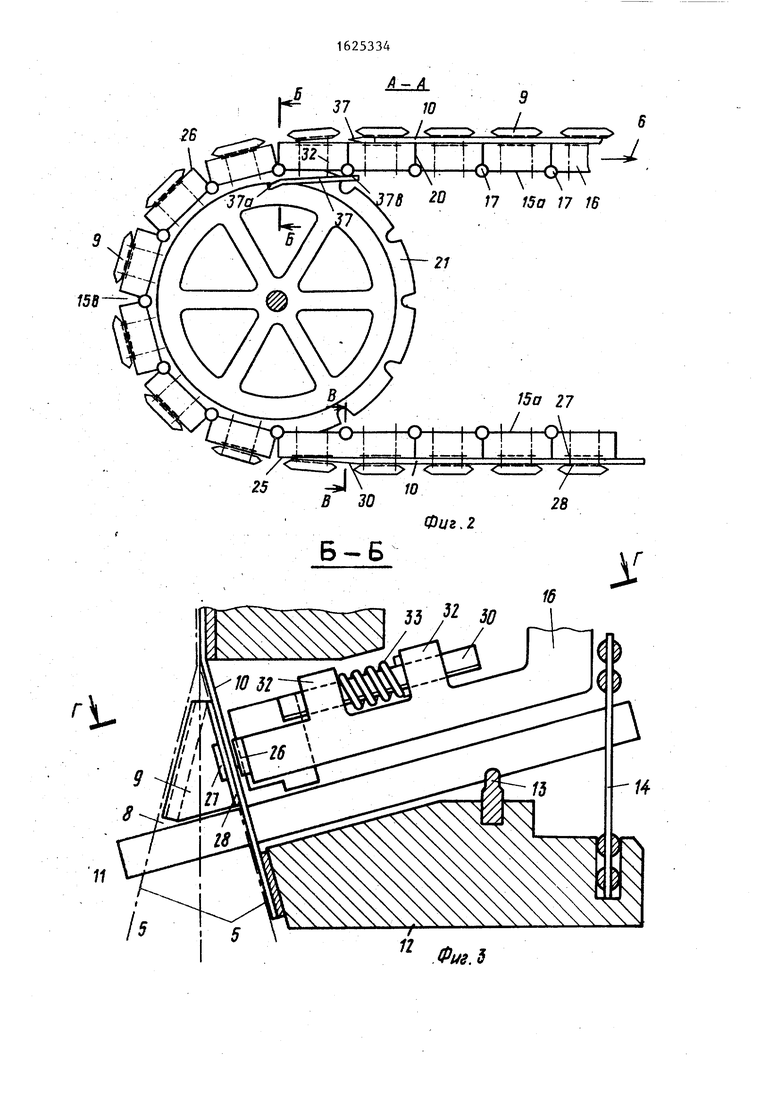
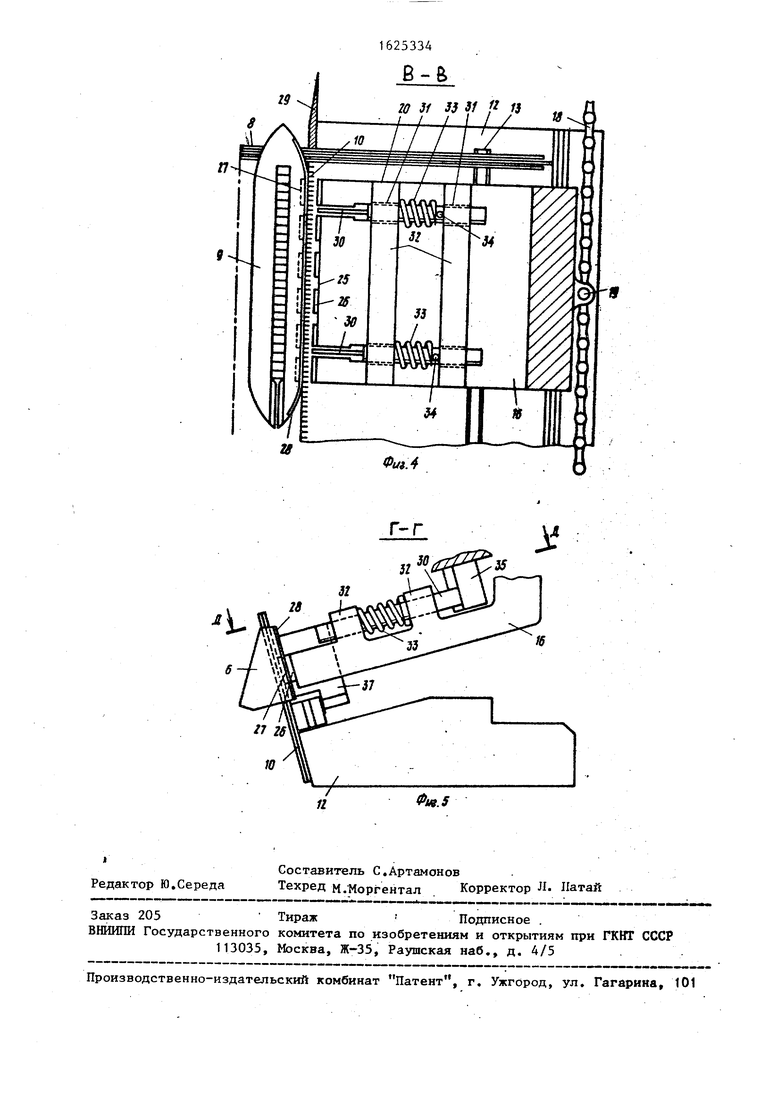
На фиг.1 схематично показан предлагаемый ткацкий станок, вид в аксо- нометрии; на фиг„2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.2; на фиг04 - разрез В-В на фиг.2; на фиг.5 -разрез Г-Г на фиг.З на фиг.6 - разрез Д-Д на фиг„5.
Ткацкий-станок содержит станину 1 выполненную для одновременного изготовления четырех полотен ткани 2. Каждое из полотен ткани 2 наматывают на товарный валик 3, установлен- ный на станине 1 станка с возможностью вращения. Навои 4 с основой 5 установлены с возможностью вращения в нижней части станины 1, а в основе 5 в направлении стрелки 6 с помощью галев 7, передвигающихся в поперечном направлении к полотнам тканей 4, образуют бегущие зева 8, при этом через каждый зев проходит один прокладчик 9 уточной нити.(фиг.З и 4).
Прокладчики 9 уточных нитей проходят друг за другом на определенном расстоянии (фиго2) по траектории, которая на одной стороне образуется направляющим бердом 10, а на другой стороне пластинами 11 для пробоя уточных нитей, установленными с возможностью поворота на размещенной на станине 1 станка плите 12 с помощью шарнира 13. Перемещение пластин 11 ограничивается с помощью зубьев направляющего берда 10 и с помощью направляющих прутков 14, вмонтированных в плиту 12. Механизм, осуществляющий их поворотное движение (не по- казан ), состоит из двух вращающихся вместе с прокладчиками 9 уточных нитей валиков.
Траектория, вдоль которой проходят прокладчики 9 уточных нитей со- держит два прямолинейных участка 15а (фиг;2) и два примыкающих к ним,искривленных в виде полукруга участка обратно кривизны 15в. Вдоль, этой траектории прокладчики 9 уточных нитей перемещаются в том же направлении с помощью приводных сегментов 16, которые соприкасаются или непосредственно друг с другом в местах шарнирных
соединений 17, или крепятся, располагаясь друг около друга, к бесконечной цепи 18 шарнирами 19 (фиг.4), при этом при прохождении прямолинейных участков 15а сегменты могут прилегать друг к другу своими соседними торцовыми поверхностями 20 (фиг.2 или располагаться на некотором расстоянии друг от друга.
Соединенные таким образом в бесконечную цепь сегменты 16 на криволинейных участках обратной кривизны 15в перемещаются с помощью установленных в станине 1 станка с возможностью вращения вокруг вертикальной оси цепных колес 21, по меньшей мере одно из которых соединено с приводом станка (не показан ) который сообщает сегментам 16 движение в сторону стрелки 6 на фиг.1.
На станине станка 1 отдельные сегменты 16 перемещаются в горизонтальном и вертикальном направлениях на соответствующих направляющих рельсах, например, обозначенных позицией 22 на фиг.1. На нижней, обращенной к галевам 7 стороне, сегменты содержат каналы управления (не показаны) , в которые заходят выступы, выполненные на ремизках галев 7. Каждый раз перед входом в зев 8 полотна ткани 4 прокладчики уточных нитей последовательно заряжаются со шпуль 23 с помощью устройства 24 для зарядки прокладчиков отрезками уточных нитей. Каждый из сегментов 16 на передней стороне, обращенной к траектории прокладчиков 9 уточных нитей содержит прямолинейную поверхность 25, которая проходит под прямым уг-. лом к торцовой поверхности 20 и на которую выведены поверхности полюсов определенного количества, в данном случае шести, постоянных магнитов 26 расположенных один около другого на некотором расстоянии. Соответствующим образом каждый прокладчик 9 уточной нити на стороне, обращенной к .поверхности 10, снабжен постоянными магнитами 27,поверхности которых закрты пленкой 28 скольжения (фиг.З и 4) и синтетического материала.В результат взаимодействия постоянных магнитов 26 и 27 осуществляется магнитная связь прокладчиков 9 уточных нитей с сегментами 16, при этом каждому сегменту 16 придан олин прокладчик 9 уточной нитио При прохождении пря-
нелинейных участков траектории прокладчики 9 уточных нитей, захваченные непрерывно и синхронно движущимися приводными сегментами 16, опираются на направляющее бердо 10, при этом обращенные друг к другу поверхности полюсов постоянных магнитов 26 и 27 фиксируются на расстоянии друг от друга, обусловленном направляющим бердом 10„
Направляющее бердо 10 проходит в основном вдоль зон формирования ткани 4 прямолинейных участков 15а. Если смотреть в направлении движения прокладчиков 9 уточных нитей, то к направляющему берду 10 примыкает клиновидная в поперечном сечении съемная площадка 29 (фиг.2 и 4), которая до момента перехода на криволинейные участки 15в переводит прокладчики 9 уточных нитей на плоскую поверхность 25 сегментов 16, так что прокладчики прилегают непосредственно к сегментам.
Так как воздушный зазор между расположенными друг против друга поверхностями полюсов постоянных магнитов 26 и 27 обусловлен лишь тонкой пленкой 28 скольжения, то создается очен большая сила магнитного притяжения, с помощью которой прокладчики 9 уточных нитей удерживаются на поверхности 25 сегментов 16 при прохождении криволинейного участка 15в их траектории. Даже при высокой скорости прокладчиков 9 уточных нитей гарантируется, что появляющиеся на участках обратной кривизны 15в центробежные силы не вызовут смещение или даже отрыв прокладчиков 9 уточных нитей от их сегментов 16.
После прохождения дугообразного участка прокладчики 9 уточных нитей при приближении к направляющему берду 10 прямолинейного участка 15а траектории необходимо снова перевести на направляющее бердо 10. Для этой цели каждый приводной сегмент содержит устройство подъема, выполненное в виде двух параллельных и расположенных на некотором расстоянии друг от друга штанг 30, которые установлены с возможностью перемещения под прямым углом к поверхности 26 и проходящие в соответствующих опорных отверстиях 31 ребер 32 сегментов 16. Каждая из штанг 30 находится под воздействием возвратной Йружины 33, которая стремится отжать
5
штангу (фиг.4) вправо, в положение ,в котором левый наружный конец штан ги 30 находится на некотором расстоянии от направляющего 10. Это положение определяется упорным штифтом 34, который может опираться на соответствующее ребро 32 и, на который опирается возвратная пружина 33.
Расстоние двух штанг 30 друг от друга выбирают таким, чтобы последт ние входили в контакт с прокладчиком вблизи переднего и заднего концов соответствующего прокладчика 9 уточных нитей, как это показано на фиг.4.
Управление штангами 30 отдельных сегментов 16 осуществляется с помос(ью управляющего кулачка 35 (фиг.2 и 6) , котоРЬШ неподвижно установлен на станине 1 станка в зоне перехода с полукруглого участка 15в на прямолинейный учас-1 ток 15а траектории. Кулачок 35 содержит, если смотреть в направлении
движения прокладчиков 9 уточных ни- тей}участок 37а подъема с значительным наклоном относительно прямолинейной траектории движения сегментов 16 и прямолинейного участка 15а траектории, к которому примыкает проходящий параллельно траектории движения или с небольшим наклоном к последней передаточный участок.35в, как показано на фиг.6.
Кулачок 35 установлен на прямолинейном участке 15а траектории, так что при его работе соответствующий прокладчик 9 уточной нити не подвергается больше воздействию центробежных сил, появляющихся на криволинейном участке траектории движения.
В направлении движения прокладчиков 9 уточных нитей перед направляющим бердом 10, показанным на фиг.6
установлена частично, клиновидная в поперечном сечении подъемная площадка 36, неподвижно установленная на плите 12 и направленная своим сужением против направления движения
(стрелка 6) прокладчиков 9 уточных нитей.
Перед подъемной площадкой 36 установлена неподвижная, проходящая внутг- ри под углом к траектории движения.
сегментов 16 криволинейная поверхность 37, которая образует предохра иительное устройство, обеспечивающее принудительный возврат набегаю- щих на криволинейную поверхность 37
штанг 30 в их исходное положение при отказе возвратной пружины 33, так что они не набегают,на подъемную площадку 36 или направляющее бердо 10 и не смогут повредить какой-нибудь из этих элементов.
Станок работает следующим образом
При прохождении, например, нижнего прямолинейного участка 15а траектории (фиг.2) в направлении стрелки 6 передвигающиеся на заданных расстояниях друг за другом и связанные магнитными силами с сегментами 16 прокладчики уточных нитей прокладываг ют в соответствующий зев 8 содержащийся в них отрезок уточной нити0 При этом они перемещаются своей пленкой 28 скольжения по направляющему берду 10, которое ограничивает их перемещение и к которой они прижимаются силами, создаваемыми постоянным магйитом 26 и 27„
После выхода из левого на фиг.1 полотна ткани 4 и при переходе на полукруглый криволинейный участок 15в каждый прокладчик 9 уточной нити по съемной площадке 29 набегает уже описанным способом на поверхность соответствующего сегмента 16, на котором прокладчик фиксируется со значительным усилием, так как воздушный зазор между относящимися друг к другу поверхностями полюсов постоянных магнитов 26 и 27 очень мал.
Состояние непосредственно перед описанным сходом соответствующего прокладчика 9 уточной нити с направляющей поверхности 10 показано на фиг. 3 и 4. Штанги 30 фиксируются возвратными пружинами 33 в исходном положении, в котором исключается соприкосновение с направляющим бер- дом 10.
После прохождения криволинейного участка 15в (фиг.2 вверху) каждый из сегментов 16 попадает со своими штангами в область действия управляющего кулачка 35, который в случае необходимости устанавливается с возможностью перестановки вдоль направляющей и по своей высоте.
Как показано на фиг,6, находящаяся сначала спереди в направлении движения штанга 30 вводит в контакт с подъемным участком 35а кулачка 35, имеющим больший наклон, благодаря чему прокладчик 9 уточной нити, преодолевая создаваемое постоянными маг0
5
0
5
0
5
0
5
0
5
нитами 26 и 27 усилие, постепенно снимается с поверхности 25, пока и задняя штанга 30 начнет свое съемное движение. Прокладчик 9 уточной нити устанавливают сначала под углом к плоскости 26, что дает преимущество, заключающееся в том, что съемное усилие прилагается не сразу, а постепенно во время продвижения вперед прокладчика 9 уточной нити.
Через передаточный участок 35в кулачка с помощью взаимодействующей с последним штангой 30 прокладчик 9 уточной нити устанавливают на таком расстоянии от поверхности 25 сегмента -16, что он при его дальнейшем продвижении легко скользит по подъемной площадке 36 и тем самым переводится на примыкающее направляющее бердо 10, при этом на него не оказывают влияния действующие навстречу его направлению движения большие тормозящие усилия, которые могли бы привести к смещению или к срыву прокладчика 9 уточной нити с сегмента 160
С передачей прокладчика 9 уточной нити на направляющее бердо 10 штанги 30 сходят с кулачка 35, так что они снова могут занять свое исходное положение под воздействием возвратной пружины 33.
В прокладчик 9 уточной нити перед вводом в зев 8 полотна ткани 4 в уст- ройств о 24 для зарядки уточных нитей вводят уточную нить, которую прокладчик 9 прокладывает далее в зев 8.
Формула изобретения
приводные сегменты, жестко установ- ленные на транспортере на одинаковом расстоянии один от другого в непосредственной близости от траек- . тории движения прокладчиков так что на дугообразных участках каждый прокладчик имеет возможность контактирования непосредственно с соответствующим ему приводным се.гментом под воздействием сил их магнитных полей, и привод транспортера для сообщения последнему однонаправленного движения, отличающийся тем, что, с целью повышения надежности в работе,, снижения шума и повышения износостойкости, каждый приводной сегмент имеет устройство подъема прокладчика при переходе последнего с приводного сегмента на направляющее бердо и средство управления устройствами подъема, а направляющее бердо со стороны захода на него прокладчика име- ;ет подъемную площадку, имеющую поперечное сечение, по меньшей мере, частично клиновидной формы, при этом средство управления взаимодействует с устройством подъема в зависимости от величины пути, пройденного каждым приводным сегментом
2а Станок поп.1, отличающийся тем, что устройство подъема управляется средством его управления при прохождении приводного сегмента по прямолинейному участку тра- 35 штанги, расстояние между которыми
екториио
5334-Ю
За Станок по пп. 1и2, отли чающийся тем, что направляю - щее бердо со стороны схода с него прокладчиков утка имеет примыкающую к нему съемную площадку, имеющую поперечное сечение по меньшей мере частично клиновидной формы.
0
5
0
5
0
чающийся тем, что устройство подъема выполнено в виде по шей мере одной подпружиненной штан-- . ги, смонтированной на приводном сегменте с возможностью взаимодействия с прокладчиком, а средство управления выполнено в виде жестко закрепленного на станине управляющего кулачка р при этом подпружиненная .штанга является толкателем этой кулачковой пары.
меньше длины прокладчика.
Фиг.1
2В
25
Б-Б
и
/5
U/
Фиг. 2
0м. 5
8
28
ФиъЛ
Фн.5
| Заявка ФРГ № 3016182, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
