Изобретение относится к технике вибрационных испытаний объектов, а именно к двухкоординатным вибростен дам.5
Цель изобретения - повышение долговечности вибростенда при испытании амортизированного объекта в виде од- номассовой колебательной системы.
На чертеже показана схема двухко- ю ординатного вкбростенда
Двухкоординатный вибростенд содержит основание 1, установленные на нем вертикальный и горизонтальный вибровозбудители 2 и 3 соответственно, 15 опору 4 для горизонтального вибровозбудителя, платформу 5, соединенную со столами 6 и 7 вибровозбудителей 2 и 3 через одностепенные виброперецаю- щие узлы 8 и 9 соответственно, и ос- 20 циллятор, установленный на основании посредством опоры 10 со стороны платформы, противоположной горизонтальному вйбровозбудителю 3о Осциллятор со держит соединенный с платформой 5 че- 25 рез.горизонтальный одностепенной виб- ропередающий узел 11 первый ползун 12, регулируемый упругодемпфирующий элемент 13 и второй ползун 14 Ползуны 2 и 14 установлены на опоре 10 30 в горизонтальных направляющих 15 и 16 На ползунах 12 и 14 закреплены грузы 17 и 18 соответственно. Место соединения ползуна 12 с платформой 5 на
ходится ниже оси горизонтального виб- кущее ускорение ползуна 12 в
... л лт« r bttrrt п e-i Ti СТ
ровозбудителя 3. Закрепляемый на верхней поверхности платформы 5 испытуемый амортизированный объект схематично представлен корпусом 19, подвижным элементом 20 и упругими элементами 21 и 22. На платформе 5 устаи- новлены виброизмерителъныБ преобразователь 23 двухкоординаткой поступательной вибрации и виброиэмеритальный преобразователь 24 угловой вибрации платформы 5 относительно горизонтальной оси ОХ, перпендикулярной линии действия вибровозбудителя 3. На подвижном элементе 20 объекта установлен виброизмерительный преобразователь 25 двухкоординатной поступательной вибрации. Вибростенд снабжен также устройством 26 для вывесшва- ния его подвижной системы. На нижней поверхности платформы 5 образованы две установочные площадки 27 и 28, которые расположены симметрично относительно оси вертикального вибровозбудителя 2 и служат для закреп40
ленИя дополнительного груза назначенного для компенсации ных моментов (угловых вибраци крепление груза 29 на площадк или 28 зависит от расположени ра масс амортизированного объ носительно центра масс платфо
Регулируемый упругодемпфир элемент представляет собой ря ройств (например, комбинация и гидравлического демпфера), рых можно независимо регулиро коэффициенты жесткости и демп ния Вибропередающие узлы 8 и сообразно выполнять идентичны чтобы обеспечить автоматическ пенсацию паразитных моментов вующих на платформу 5 от сил кающих в узлах 8 и 9 при верт перемещении платформы 50
Приняты следующие обозначе С,,,и С - центры масс платфор корпуса 19 и дополнительного 29 соответственно; F и F реакции, возникающие в упруги ментах 21 и 22 объекта при ко подвижного элемента 20; FVg, противодействия устройства 26 вывешивания; Fk, , FK2i) F прикладываемые к платформе 5 сационные силы: инерционная F « (т1г+ ГЦ) (где т12.и т сы ползуна 12 и груза 17; &
лении оси OY), динамическая F висит от частоты колебаний пл 5 в направлении оси пу) и ин ные FJ и 7К5 mZ9 m/j,g - масса дополнительного
29; aug. и azs - текущее ус платформы 5 в направлении ос OZ) ; F$ и F - зозмушаюшие
ИFl Д
ционные силы (F J} ayfS tn эт5-), приложенные в точ lj) и )g. расстояния от лини вия сил и F до оси OZ, п щей через точку Cg.; 1, 14, расстояния от линий действия
, кз FP и .fl0 оси OY П дящей через точку Линии д
Рк«и Fj,2совпадают„
55
Двухкоординатный вибросте тает . следующим образом
Этап НастройкИо В исходно нии оси действия вибровозбуд Ч2 и 3 проходят через центр платформы 5 о
5 0 5 0
кущее ускорение ползуна 12 в
гт л лт« r bttrrt п e-i Ti СТ
0
ленИя дополнительного груза 29, предназначенного для компенсации паразитных моментов (угловых вибраций)„ Закрепление груза 29 на площадке 27 или 28 зависит от расположения центра масс амортизированного объекта относительно центра масс платформы.
Регулируемый упругодемпфирующий элемент представляет собой ряд устройств (например, комбинация пружины и гидравлического демпфера), в которых можно независимо регулировать коэффициенты жесткости и демпфирования Вибропередающие узлы 8 и 9 целесообразно выполнять идентичными, чтобы обеспечить автоматическую компенсацию паразитных моментов,, действующих на платформу 5 от сил, возникающих в узлах 8 и 9 при вертикальном перемещении платформы 50
Приняты следующие обозначения: , С,,,и С - центры масс платформы 5, корпуса 19 и дополнительного груза 29 соответственно; F и F силы реакции, возникающие в упругих элементах 21 и 22 объекта при колебаниях подвижного элемента 20; FVg, - сила противодействия устройства 26 для вывешивания; Fk, , FK2i) F кэ - прикладываемые к платформе 5 компенсационные силы: инерционная FKM « (т1г+ ГЦ) (где т12.и т ,,7 - массы ползуна 12 и груза 17; Те
направлении оси OY), динамическая F«2 (зависит от частоты колебаний платформы 5 в направлении оси пу) и инерционные FJ и 7К5 mZ9 SZ5 (где m/j,g - масса дополнительного груза
29; aug. и azs - текущее ускорение платформы 5 в направлении осей OY к OZ) ; F$ и F - зозмушаюшие инер ИFl Д-Ј
ционные силы (F J} ayfS v tn эт5-), приложенные в точке С ; lj) и )g. расстояния от линий действия сил и F до оси OZ, проходящей через точку Cg.; 1, 14, 15-и 6 расстояния от линий действия сил
, кз FP и .fl0 оси OY ПР°Х°- дящей через точку Линии действия
Рк«и Fj,2совпадают„
Двухкоординатный вибростенд работает . следующим образом
Этап НастройкИо В исходном состоянии оси действия вибровозбудителей Ч2 и 3 проходят через центр масс платформы 5 о
5Ь
Определяют i-accy груза 29 из условия тад 14 - 2 0„ Определяют массы грузов 17 и 18 из условий m« V& %г)л1б- 0 и
jig- Ц«+ 2Ч8)-16 « 0 (щ,гч пц4
тго
массы ползунов 12 и 14; tn«0- масса
подвижного элемента 20 объекта)0 Испытуемый объект закрепляют на платформе 5, добиваясь, чтобы линия дей- ствия силы FJif объекта проходила через центр масс С Настраивают устройство 26 дл вывешивания (силу подвижной системы вибростенда, добиваясь компенсации веса подвижной системы (испытуемый объект, платформа 5, стол б возбудителя 2, груз 29, узел 8 и пр.) при условии сохранения горизонтальности рабочей поверхности платформы 5 стенда,
Настраивают параметры упругодемп- фирующего элемента 13 Fro коэффициенты жесткости и демпфирования можно настроить, например, по следующему алгоритму. Включают вкбровосбудителъ 3 и устанавливают значение частоты 63 возбуждения, при которой колебани испытуемого объекта становятся резонансными в горизонтальном направлени При резонансных колебаниях объекта амплитуды паразитных угловых колебаний платформы 5 и амплитуды парази - ных механических напряжений в одно- сгепенных поступательных узлах 8, 9 и 11 становятся максимальными„ Угловые колебания платформы 5 контролируют виброизмерительным преобразователем 24, Коэффициенты жесткости и демпфирования упругодемпфирующего элемента 13 устанавливают такими, пр которых выходной сигнал преобразователя 23 становится минимальным. Возможность такой настройки вытекает из следующего о Направление действия силы реакции зависит от частоты СО и изменяется от синфазного при СО - О к противофазному при G)(Qije где ОЭре Зу резонансная частота колебаний объекта. Амплитуда и фаза паразитного момента Njfap р $ относитель но точки Ср также зависят от частоты СО колебаний платформы 5. ,.
Для исключения влияния М Qp на точность виброиепытаний и долговечность вибростенда к платформе при- кпадывается дополнительный компенсирующий момент комп мпар кг 1
5 0 (3 5 0
5
5
16
относительно C.j- от силы Ркг реакции упругодемпфирующего элемента 13, возникающей при колебаниях лолзуна 14. Силы F К2 располагаются с противоположных сторон относительно центра Cg- масс платформы, что обеспечивает при правильной настройке упругодемпфирующего элемента 13 и правильном выборе массы ЕЦВ достаточно точную их автокомпенсацию на всех частотах СО .
Достигаемая при оснащении вибростенда осциллятором компенсация паразитного момента обеспечивает снижение нагрузок на вибропередагешие узлы, благодаря чему повышается долговечность этих узлов и вибростенда в целом,
Формула изобретения
1.Двухкоординатный вибростенд,со- ; держащий основание, установленные на нем вертикальный и горизонтальный вибровозбудители, платформу с верхней установочной поверхностью для закрепления испытуемого объекта, одностепенные вибропередающие узлы, соединяющие вибровозбудители с платформой, отличающийся тем, что. с целью повышения долговечности при испытании амортизированного объекта в виде одномассовой колебательной системы, он снабжен осциллятором, установленным на основании со стороны платформы, противоположной горизонтальному вибровозбудитепю, и включающим два установленных в горизонтальных направляющих ползуна с закрепленными на них грузами и размещенный между ползунами регулируемый упругодемпфирующий элемент, и горизонтальным одностеленным вибро- передающим узлом, через который один из ползунов осциллятора соединен с платформой, при этом место их соединения находится ниже оси горизонтального вибровозбудителя„
2. Вибростенд по п. 1, отличающийся тем, что на нижней поверхности платформы образованы две установочные площадки для закрепления дополнительного груза, расположенные симметрично относительно оси вертикального вибровозбудителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный вибростенд | 1984 |
|
SU1241079A1 |
| Двухкоординатный вибростенд | 1985 |
|
SU1350518A2 |
| Стенд для испытания изделий на трехкомпонентную вибрацию | 1981 |
|
SU1024781A1 |
| ДВУХКООРДИНАТНЫЙ ВИБРОСТЕНД | 1993 |
|
RU2116639C1 |
| Двухкоординатный вибростенд | 1985 |
|
SU1288522A1 |
| Двухкоординатный вибростенд | 1987 |
|
SU1435979A1 |
| Двухкоординатный вибростенд | 1985 |
|
SU1305548A1 |
| Двухкоординатный вибростенд | 1980 |
|
SU947669A1 |
| Устройство для передачи вибрации от вибровозбудителя испытуемому изделию | 1989 |
|
SU1753320A1 |
| Двух(трех) координатный вибростенд | 1987 |
|
SU1523932A1 |
Изобретение относится к технике испытаний яа вибрацию и обеспечивает повышение долговечности вибростенда при испытании амортизированного объекта в виде одномассовой колебатель, ной системы Это достигается благодаря оснащению вибростенда, включающего платформу 5 для закрепления испытуемого объекта, вертикальный 2 и горизонтальный 3 вибровозбудители И одностепенные вибропередающие узлы , 8 и 9, соединяющие вибровоэбудители с платформой, осциллятором, установленным на основании со стороны платформы, противоположной горизонтальному вибровозбудителю 3„ Осциллятор включает два установленных в горизонтальных направляющих 15, 16 ползуна 12, 14 с закрепленными на них грузами 17, 18 и размещенный между ползунами регулируемый упругодемпфирую- ший элемент 130 Ползун 12 соединен с платформой через горизонтальный одностепенной вибропередающий узел 11, причем место соединения расположено ниже оси горизонтального вибровозбудителя,, На нижней поверхности платформы выполнены две расположенные симметрично относительно оси вертикального вибровозбудителя установочные площадки 27, 28 для закрепления дополнительного груза 29, Достигаемая с помощью осциллятора компенсация паразитного момента от сил инерции колеблющегося объекта обеспечивает снижение нагрузок на вибропередающие узлы. 1 з„л„ ф-лы, 1 ил. 25 Iff Ј (Л о ю со i i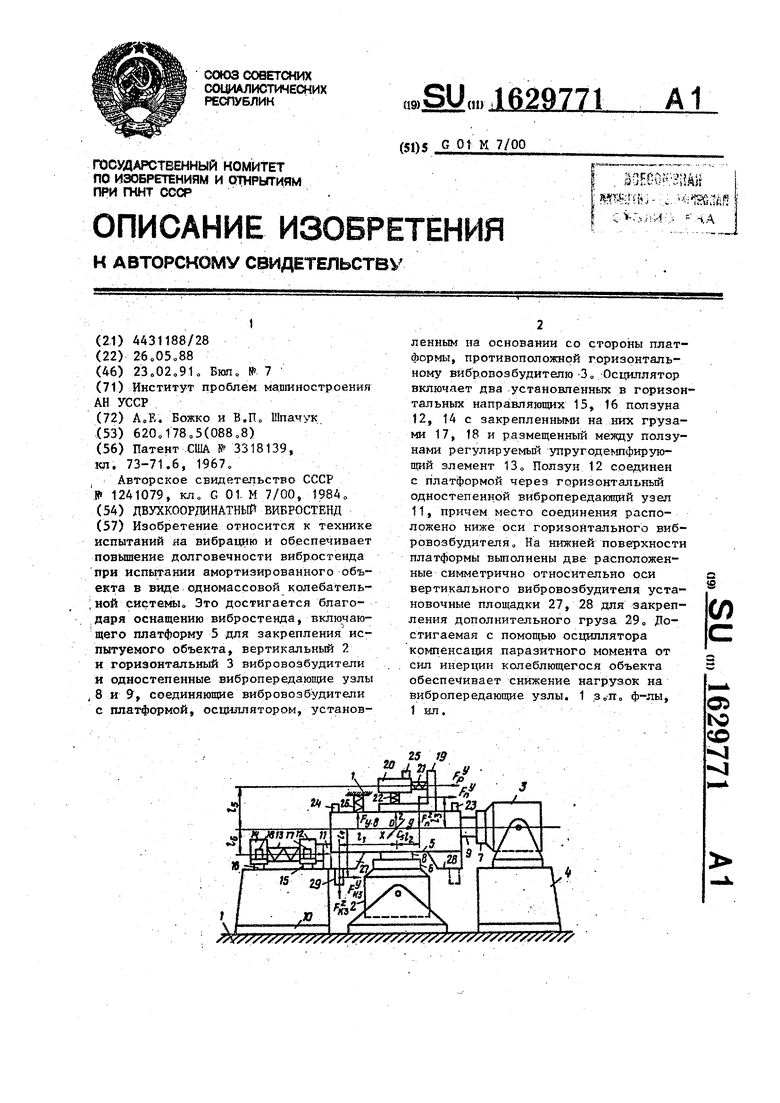
| Патент США If 3318139, кл | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
