Изобретение относится к цифровой измерительной технике и может быть использовано для измерения параметров динамических характеристик аналого-цифровых преобразователей (АЦП) высокой точности и быстродействия при их метрологической аттестации в динамическом режиме, а также в сетевых измерительных системах и автоматических сетях.
Цель изобретения - повышение точности измерения параметров.
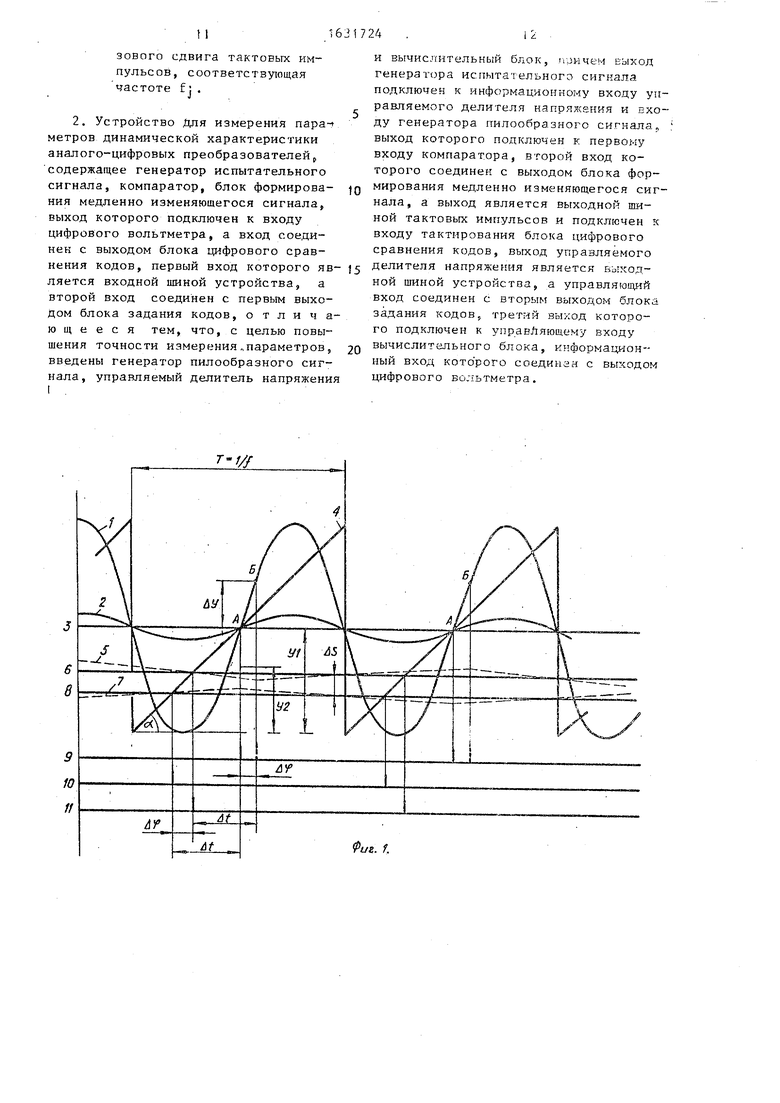
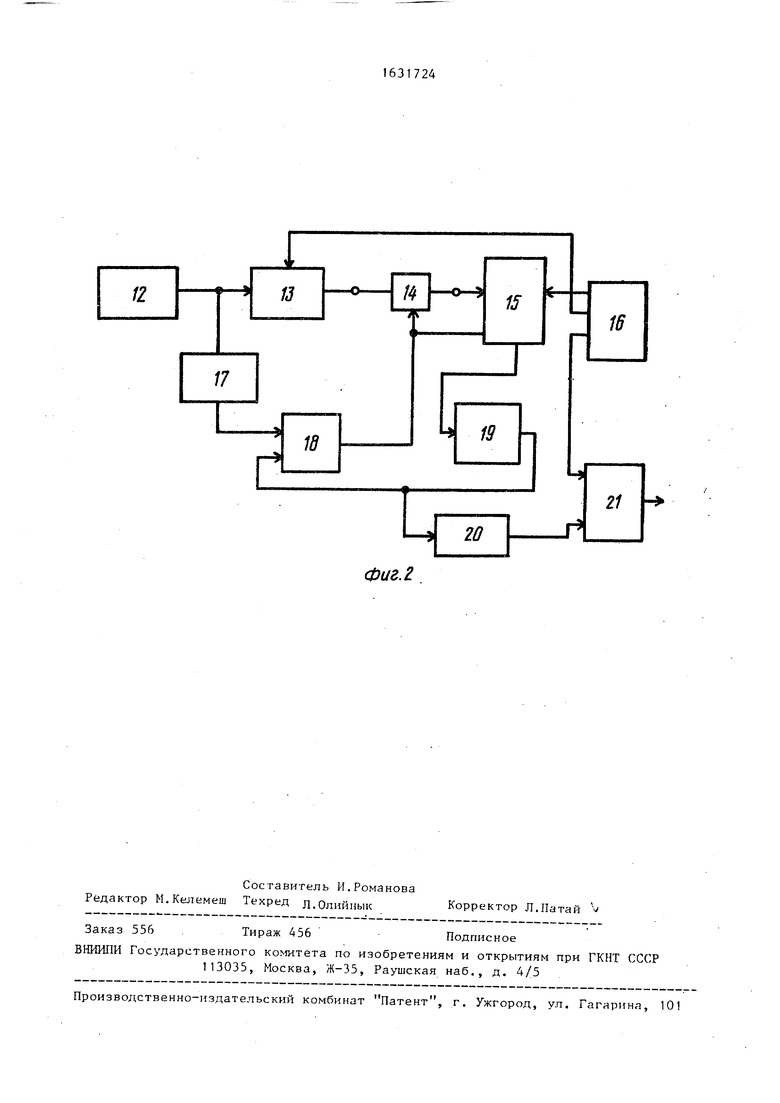
На фиг.1 приведены временные диаграммы, иллюстрирующие способ; на фиг.2 - функциональная схема устройства для реализации способа.
На фиг.1 показаны: 1 - периодический испытательный сигнал 2 .- этот же сигнал с уменьшенной амплитудой; 3 - заданный опорный уровень, в конкретном случае равный нулю , 4 - производный от сигнала 1 пилообразный сигнал, который формируется в моменты перехода сигнала 1 через опорный уровень 3; 5 - вспомогательный медленно изменяющийся сигнал управления формированием тактовых сигналов при действии испытательного сигнала 1, 6 - среднее значение сигнала 5{ 7 - вспомогательный медленно изменяющийся сигнал управления формированием тактовых сигналов при действии испытательного сигнала 2, 8 - среднее значение сигнала 1, 9 - сигналы, соответствующие действительным моментам преобразования испытуемым АЦП сигнала 1 в точке А (сплошная линия) и сигнала 2 в точке Б (пунктирная линия), 10 - сигнал тактирования сформированный при сравнении сигнала 7 с сигналом 4; 11 - сигнал тактирования, сформированный при сравнении сигнала 5 с сигналом 4; &Y
20
образователя в динамике при преобразовании сигнала 1 ; Т - период следования сигналов 1, 2 и 4 j ( - частота их следования, (X - угол наклона сигнала 4 по отношению к опорному уровню 3.
Устройство содержит генератор 12 испытательного сигнала, управляемый
JQ делитель 13 напряжения, испытуемый АЦП 14, блок 15 цифрового сравнения кодов, блок 16 задания кодов, генератор 17 пилообразного сигнала, компаратор 18, блок 19 формирования мед15 ленно изменяющегося сигнала, цифровой интегрирующий вольтметр 20, вычислительный блок 21.
Реализация способа предусматривает поочередную подачу на вход испытуемого АЦП испытательного сигнала 1 с уменьшенной амплитудой (сигнал 2) и увеличенной амплитудой (сигнал 1). Это обусловлено тем, что малая амплитуда сигнала 2 имитирует квазистати25 ческий режим работы АЦП, сохраняя условия автоматической привязки к сигналу 1 при формировании тактовых сигналов в обоих случаях, причем чем больше разница амплитуд, тем
3Q лучше проявляется влияние увеличения скорости изменения сигнала в точке А на динамику испытуемого АЦП. Практически, если частота Ср сигнала 1 выбрана близкой к верхней частоте
..,. спектра преобразуемых АЦП сигналов, то величина амплитуды сигнала 2 выбирается равной 5-10% динамического диапазона преобразования АЦП, а величина сигнала 1 выбирается равной
40 половине или полному значению диапазона. Разбросы выбора частоты f и амплитуды сигнала 2 в пределах 20-30% существенного .злияния не имеют.
Реализация способа производится
Y - Y. | - амплитудная погрешность 45 слеДУЮ1Дим образом.
преобразования испытуемого АЦП в точ- При действии входного периодичес0
образователя в динамике при преобразовании сигнала 1 ; Т - период следования сигналов 1, 2 и 4 j ( - частота их следования, (X - угол наклона сигнала 4 по отношению к опорному уровню 3.
Устройство содержит генератор 12 испытательного сигнала, управляемый
делитель 13 напряжения, испытуемый АЦП 14, блок 15 цифрового сравнения кодов, блок 16 задания кодов, генератор 17 пилообразного сигнала, компаратор 18, блок 19 формирования медленно изменяющегося сигнала, цифровой интегрирующий вольтметр 20, вычислительный блок 21.
Реализация способа предусматривает поочередную подачу на вход испытуемого АЦП испытательного сигнала 1 с уменьшенной амплитудой (сигнал 2) и увеличенной амплитудой (сигнал 1). Это обусловлено тем, что малая амплитуда сигнала 2 имитирует квазистати5 ческий режим работы АЦП, сохраняя условия автоматической привязки к сигналу 1 при формировании тактовых сигналов в обоих случаях, причем чем больше разница амплитуд, тем
Q лучше проявляется влияние увеличения скорости изменения сигнала в точке А на динамику испытуемого АЦП. Практически, если частота Ср сигнала 1 выбрана близкой к верхней частоте
,. спектра преобразуемых АЦП сигналов, то величина амплитуды сигнала 2 выбирается равной 5-10% динамического диапазона преобразования АЦП, а величина сигнала 1 выбирается равной
0 половине или полному значению диапазона. Разбросы выбора частоты f и амплитуды сигнала 2 в пределах 20-30% существенного .злияния не имеют.
Реализация способа производится
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения динамических характеристик преобразования быстродействующих и высокоточных аналого-цифровых преобразователей и устройство для его осуществления | 1984 |
|
SU1203699A1 |
| Устройство для определения динамическихХАРАКТЕРиСТиК пРЕОбРАзОВАТЕлЕй | 1979 |
|
SU838612A1 |
| Устройство для измерения динамической погрешности аналого-цифровых преобразователей | 1984 |
|
SU1221749A1 |
| Способ измерения динамической погрешности аналого-цифровых преобразователей | 1985 |
|
SU1302431A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ФОРМЫ ИМПУЛЬСА ДЕЛЕНИЙ | 2014 |
|
RU2572063C1 |
| Устройство для автоматического измерения характеристики преобразования быстродействующих аналого-цифровых преобразователей | 1982 |
|
SU1058048A1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ СЛУЧАЙНЫХ СИГНАЛОВ И ЦИФРОВОЙ ИЗМЕРИТЕЛЬ (ВАРИАНТЫ) | 2003 |
|
RU2259570C2 |
| СИГМА-ДЕЛЬТА-АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2145149C1 |
| Устройство для измерения мощности потерь при коммутации тиристора | 1980 |
|
SU960673A1 |
| Способ контроля динамического баланса белого кинескопа цветного телевизионного приемника и устройство для его осуществления | 1989 |
|
SU1728985A1 |
Изобретение относится к цифровой измерительной технике. Цель изобретения - повышение точности измерения параметров. Цель достигается благодаря управлению формированием тактовых сигналов АЦП посредством вспомогательного медленно изменяющегося сигнала, получаемого при сравнении кодов АЦП и опорного уровня, а также сравнению текущих значений испытательного сигнала с этим вспомогательным сигналом. Обеспечивается автоматическая привязка моментов тактирования АЦП к испытательному сигналу независимо от его частоты и амплитуды и систематических задержек в проверяемом АЦП. Измерение средних значений при разной амплитуде вспомогательного сигнала и определение их разности дает возможность определить фазовый сдвиг и рассчитать параметр динамической характеристики АЦП, не зависящей от вида входного сигнала, т.е. от его формы, частоты и т.д. Таким образом, при одном измерении обеспечивается определение параметра дифференциального нелинейного уравнения, которое полностью определяет поведение АЦП в динамике при любых входных сигналах. Это увеличивает точность измерения параметров динамической характеристики АЦП, поскольку исключает необходимость дополнительного сопоставления параметров характеристики, измеренных на разных частотах. Точность измерения в предлагаемом способе может быть дополнительно повышена путем измерения k параметров на k частотах испытательного сигнала за счет уточнения описания поведения АЦП в динамике. Предлагаемое устройство обеспечивает измерение параметров динамической характеристики АЦП, не зависящих от параметров преобразуемого сигнала, исключает накопление погрешностей при суммировании испытательных сигналов, измерение величины и знака производной, множественных измерений во всех точках динамической характеристики АЦП. Это достигается за счет введения дополнительных блоков: управляемого делителя напряжений, генератора пилообразного сигнала, вычислительного блока и предлагаемого соединения этих блоков. 2 ил. Ј (Л С5 00 | ND 4ь
ке А при действии сигнала 1, Y - значение преобразованного аналого- цифровым преобразователем сигнала 2 в точке AJ Y - значение преобразованного аналого-цифровым преобразователем сигнала 1 в точке A , US - разность средних значений 6 и 3 сигна лов 5 и 7 соответственно, At - систематическая задержка сигналов 10 и 11 тактирования в испытуемом аналого-цифровом преобразователе,1 ДСр - величина фазового сдвига, обусловленного работой аналого-цифрового пре0
5
кого сигнала 2 формируют тактовые сигналы со стабильной час готой iJ 1/Т следования, соответствующей частоте следования сигнала 1 в моменты его перехода через опорный уровень 3, например в точках А.
При формировании тактовых сигналов 10 сравнивают значения сигнапа 4 с вспомогательным сигналом 7 управления формированием тактовых сигналов, который в исходном состоянии равен нулю. Одновременно со сравнением подают на вход испытуемого АЦП
5 if
.сигнал 2, соответствующий уменьшенному по амплитуде сигналу 1, В результате преобразования испытуемым АЦП сигнала 2 под действием сформированных тактовых сигналов 0 на его выходе формируется код, пропорциональный значению Y входного сигнала 1. Данный код сравнивают с кодом опорного уровня 3 в моменты Действия сигналов 9 (сплошная линия). В результате этого сравнения формируют вспомогательный сигнал 7 управления формированием тактовых сигналов 10 следующим образом. Если код, соответствующий результату аналого-цифрового преобразования в момент действия сигнала 9 (сплошная линия на фиг.1), меньше или равен коду опорного уровня 3, то сигнал 7 нарастает по величине, если код результата преобра зования больше кода опорного уровня 3, то сигнал 7 спадает по величине.
Описанный процесс многократно повторяется, после чего сигнал 7 окончательно устанавливается относитепь- но его среднего значения 85 а сформированные сигналы 10 и 9 займут i.o- ложение, показанное на фиг. 1. Постоянная времени изменения сигнала 7 такова, что время изменения его по величине на цену кванта младшего разряда испытуемого АЦП равно времени нескольких десятков периодов следования сигнала 4.
Поскольку реальный испытуемый АЦП имеет систематическую задержку отсчета fat, величина которой заранее не известна, то управление формированием тактовых сигналов по результатам сравнения кодов осуществляется таким образом, что среднее значение 8 сигнала 7 изменяется до тех пор, пока формируемый тактовый иг- нал не сдвинется на Д t по отношению к точке А.
В частности, согласно фиг.1 изменения среднего значения 8 сигнапа 7 происходят так, чтобы в моменты равенства текущего значения сигнала 4 и сигнала 7 формируется тактовый сигнал 10. При этом действительный момент преобразования определяется сигналом 9, показанным сплошной линией, а вспомогательный сигнал 7 не - значительно колеблется по отношению к своему среднему значению 8, поскольку код испытуемого АЦП, соот7246
ветствуюший значению Y, сигнала 1 в точке А, изменяется от кода уровня 3 к коду, большему его на единицу младшего разряда, и наоборот.
Согласно способу измеряют среднее значение 8 сигнала 7, а затем увеличивают амплитуду сигнала 2 до величины сигнала 1.
Q В частности, из-за того, что крутизна сигнала 1 в точке А превышает
j в этом случае допустимую скорость
изменения входного сигнала для испытуемого АЦП, код преобразуемого 5 значения Y. сигнала I в точке А становится меньше кода значения Y, равного коду опорного уровня 3, появляется амплитудная погрешность AY или АЦП не усдевает правильно преобра- С зовать сигнал 1 в точке А.
С этого момента в результате сравнения кода, пропорционального преобразованному АЦП значению Y. сигнала 1 в точке А, с кодом опорного уровня 5 3 формируется аналогично описанному новый вспомогательный сигнал 5, который сравнивают с текущим значением сигнала 4. В результате сравнения формируют тактовые сигналы 11. 0 При формировании сигнала 5 происходит фазовый сдвиг на 10 тактовых сигналов 11 относительно сигналов 10, Сдвиг устанавливается после окончания формирования сигнала 5 и стаби- лкзации его среднего значения 6. Стабилизация среднего значения 6 соответствует положению, когда при преобразовании испытуемым АЦП сигнала 1 в точке Б на его выходе вновь появ- Q ляется код, соответствуюицш коду нулевого уровня 3. При этом среднее значение 6 сигнала 5 таково, что при ра- венс.тве сигнала 5 с текущим значением сигнала 4 формируется тактовый 5 сигнал 11, сдвинутый наД(опо отношению к сигналу 10 так, что действительный момент преобразования,определяемый сигналом 9 (пунктирна фиг.1),
соответствует преобразованию значе- 0 ния сигнала 1 в точке Б. Очевидно, что это значение будет таково, что можно скомпенсировать погрешность Л.(Г и сделать ее равной нулю.
Согласно способу измеряют среднее 5 значение 6 сигнала 5 и по разности средних значений US определяют величину фазового сдвига из очередного соотношения
ДС| ДЗ ctg(X,, (О
Покажем, что параметр aQ динамической характеристики АЦП определяется по формуле
а0 tg /2fif,
а динамика работы АЦП при преобразовании любых сигналов описывается системой уравнений:
а0 z (t) + Z(t) x(t) Y(t) h(Z(t)),
(:
где x(t) - произвольный входной сигнал АЦП ,
Y(t) - выходной сигнал АЦП; (Z) - статическая характеристика преобразования АЦП.
В общем случае для повышения точности измеряют k параметров динамической характеристики АЦП на k частотах.
При этом параметры динамической характеристики определяются из системы уравнений
LK|4 ; 2-,..
) ,СО j , ,
aic-a; 03
J ,«0
О
гце 1
-1 1г
-I , . . р , V-,
СО . 2 n f - частоты периодического испытательного сигнала/
СР: - величина фазового сдвига тактовых импульсов, соотО/ ветствующая частоте f ;
целая часть от частного
чисел k и 2, тогда динамика работы АЦП будет описываться системой уравнений
ra0Z(W4t)+a,)t..,.1z (t)+Z(t)x(t) (Z).
Очевидно, что во всех случаях описания динамических свойств АЦП параметры aj (i 0,1,..., k-1) не зависят от преобразуемых сигналов, что увеличивает точность описания работы АЦП в целом.
Выбор частот Ц j,, осуществляется таким образом, чтобы была охвачена область определения верхней частоты спектра преобразуемых АЦП сигналов, а также области середины частотного диапазона и граничных частот.
Устройство работает следующим образом.
Выходной сигнал 1 с генератора 12 поступает на вход генератора 17 пилообразного сигнала 4 и на аналого
5
0
5
0
5
0
45
50
55
вый вход управляемого целителя 13 напряжения. Поскольку в исходном состоянии на всех выходах блока 16 задания кодов был нулевой код, то на управляющем цифровом входе управляемого делителя 13 отсутствует сигнал управления, в результате в блоке 13 установлен максимальный коэффициент деления и на его выходе действует сигнал 2 (фиг. 1) уменьшенной амплитуды, который поступает на вход АЦП 14.
Одновременно с этим происходит сравнение сигнала 4 с выхода генератора 17 пилообразного сигнала с медленно изменяющимся сигналом 7 (фиг.1) с выхода блока 19. Сравнение реализуется посредством аналогового компаратора 18, ч результате чего на его выходе формируется тактовый CHI- нал 10, который поступает на входы тактирования АЦП 14 и блока 15 цифрового сравнения кодов.
На выходе испытуемого АЦП 14 в моменты тактирования формируется код, пропорциональный значению Y сигнала 2 в точке А (фиг. 1). Этот код сравнивается в момент тактирования с нулевым кодом с второго выхода блока 16 задания кодов. В результате, если выходной код АЦП 14 меньше или равен при сравнении коду с выхода блока 16, то сигнал с его выхода управляет блоком 19 таким образом, что выходное напряжение на выходе блока 19 возрастает. Когда оно достигнет значения, при котором выходной код АЦП 14 превысит код с выхода блока 16, выходной сигнал блока 15 управляет блоком 19 так, что напряжение на его выходе начинает уменьшаться. При этом среднее значение fапряжения (сигнал 8, фиг. 1) с выхода блока 19 автоматически устанавливается таким, чтобы тактовые импульсы формировались с учетом систематической задержки &t (фиг. 1) испытуемого АЦП 14. В результате действительные моменты преобразования соответствуют точке А, а управление формированием напряжения на выходе блока 19 (сигнал 7, фиг. 1) обеспечивается только в моменты (сигнал 9, фиг.1), когда мгновенные значения напряжения на входе АЦП 14 равны значениям опорного уровня.
Среднее значение напряжения на выходе блока 19 измеряется цифровым
91
интегрирующим вольтметром 20, с вы хода которого цифровой код поступает в вычислительный блок 21. После окончания цикла измерения вольтметром 20 в блоке 16 задают нулевой код опорного уровня и единичный код выходов управления. При этом в управляемом делителе 13 устанавливается меньший коэффициент деления. Это определяется тем, что управляющий сигнал с выхода блока 16 действует по управляющему входу делителя 13, в результате устанавливается максимальный коэффициент передачи в делителе 13 и на его выходе появляется сигнал 1 (фиг. 1) большей амплитуды, который поступает на вход АЦП 14.
Одновременно с этим сигналом с третьего выхода бгсока 16 производит- ся подготовка блока 21 к вычислениям согласно соотношениям (1) и (2) При этом производится запись в блок 21 цифрового кода, ранее измеренного среднего значения 8 сигнала 7 с вы- хода цифрового вольтметра 20.
При преобразовании сигнала 1 происходит формирование нового сигнала 5 (фиг. 1) в блоке 19 в результате сранения кода АЦП 14 к нулевого кода с второго выхода блока 16 в блоке 15 цифрового сравнения кодов. Формируемый сигнал 5 изменяется так, что в результате его сравнения с сигна- пом 4 с выхода генератора 17 форми- рутотся тактовые сигналы 11, сдвинутые относительно тактовых сигналов 10 предыдущего цикла формирования на ЛЦ. Среднее значение 6 сигнала 5 измеряется цифровым вольтметром 20 и записывается-в вычислительный блок 21, где производится определение величины йЦ по разности ДБ средних значений 6 и 8 из соотношения (1) и затем определяется параметр динамичес- кой характеристики АЦП по соотношению (2) .
Формула изобретения
10
«л
Q 5
05 О 5
0
5
кому сигналу, и сравнении полученного кода с кодом опорного уровня в момент поступления тактовых импульсов, формировании медленно изменяющегося сигнала по результатам сравнения с одновременным измерением его среднего установившегося значения, которое запоминают в конце цикла измеренияр а затем используют для вычисления параметра динамической характеристики, отличающий- с я тем, что, с целью повышения точности измерения параметров, одновременно с формированием двух периодических испытательных сигналов формируют вспомогательный сигнал пилообразной формы, при этом в первом цикле измерения в качестве первого периодического испытательного сигнала используют сигнал с амплитудой, соответствующей 5-10% .от динамического диапазона аналого-цифрового преобразователя, во втором цикле измерения в качестве второго Периодического испытательного сигнала используют первый периодический испытательный сигнал с амплитудой, равной динамическому диапазону аналого- цифрового преобразователя, а формирование тактовых импульсов в каждом цикле измерения осуществляют в момент равенства соответствующего медленно изменяющегося сигнала и вспомогательного сигнала, после окончания второго цикла измерения по разности измеренных для каждого цикла средних значений медленно изменяющихся сигналов определяют величину фазового сдвига тактовых импульсов и запоминают ее, причем первый и второй циклы измерения повторяют для k частот первого и второго периодических испытательных сигналов с определением и последующим запоминанием соответствующих величин фазовых сдвигов, а параметры динамической характеристики определяют из системы линейных уравнений относительно коэффициентов а.
СК/2 ,
, 0 alh
О
- tgCf: 21 (-1) aL,2. J
где j 1, .. . , kСд1 2 - частоты периодического испытательного сигнала; fj- величина соответствующего фазового сдвига тактовых импульсов, соответствующая
частоте f;. j
и вычислительный блок, ..зичем выход генератора испытательного сигнала подключен к информационному входу управляемого делителя напряжения к сходу генератора пилообразного сигнала,, выход которого подключен к первому входу компаратора, второй вход которого соединен с выходом блока формирования медленно изменяющегося сигнала, а выход является выходной шя- ной тактовых импульсов и подключен к входу тактирования блока цифрового сравнения кодов, выход управляемого делителя напряжения является выходной шиной устройства, а управляющий вход соединен с вторым выходом блоке задания кодов, третий выход которого подключен к управляющему входу вычислительного блока, информационный вход которого соединен с выходом цифрового вольтметра.
Фиг. f.
12
13
Г
Iff
П
-o-S
15
16
19
С
20
21
Фиг. г
| Способ измерения динамической погрешности аналого-цифровых преобразователей | 1985 |
|
SU1302431A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ измерения динамических характеристик преобразования быстродействующих и высокоточных аналого-цифровых преобразователей и устройство для его осуществления | 1984 |
|
SU1203699A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
