Изобретение относится к технике виброиспытаний, а именно к устройствам, обеспечивающим возможность воспроизведения динамических характеристик руки человека при измерении вибрации ручного инструмента
Цель и (обретенияоблегчение эксплуатации
На фиг 1 изображена схема имитатора, разрез, на фиг 2 - сечение А-А на фиг 1; на фиг 3 - сечение Б-Б на фиг 1
Имитатор содержит полый корпус 1, в который вставлены вал 2, имитирующий массу руки человека, с буртиком 3 в средней части, две конические пружины 4 и 5 сжатия, расположенные оппозитно относительно буртика 3 и упирающиеся в него меньшими по диаметру концами, регулятор жесткости пружин 4 и 5 и фрикционный демпфер Регу лятор жесткости пружин 4 и 5 состоит из втулки 6, имеющей отверстия 7 для поворота втулки b с помощью рычага (не показан) через отверстие 8 в корпусе 1, и двух колец 9 и 10, связанных с втулкой 6 резьбовыми со единениями, выполненными с противополож ными направлениями наемки В улка 6 с одной стороны упирается в буртик 11 в кор пусе 1, а с подпирается всывкой 12, в которой установлен фрикционный демпфер, состоящий из фюроп.чск гово о ко 13 и двух клиновых колец 14 и 1Г поджимаемых pei v. iHiopoM It) Вставка 12 удерживается в корпусе накидной гайкой 17 и фиксируется от проворога in попкой 18 В кольца 9 и 10 запрессованы шпи ьки 14 и 20, входящие в отверстие 21 вставки 12 фиксации колец ) и 10 от вращения
Имитатор рабсяает еле Г ющим образом
В зависимости от мопи- ги испытываемого инструмента задает., н жесткость пружинам 4 и 5 путем проворога втулки 6 рычагом, вставляемым в отверстия 7 через отверстие 8 в корпусе 1 шки 19 и 20, упираясь
в неподвижные буртик 11 и вставку 12, удерживают от проворота кольца 9 и 10, в результате чего последние сближаются или отдаляются друг от друга, изменяя жесткость пружин 4 и 5. Зажимая фторопластовое кольцо 13 между клиновыми кольцами 14 и 15 при помощи регулятора 16, задают требуемое демпфирование. Прикрепляют к валу 2 держатель инструмента Сам имитатор закрепляют на стенде Включают инструмент 0 и проводят испытание В результате того, что к инструменту не требуется прикладывать дополнительное усилие для выведения имитатора в рабочее положение (он уже готов выполнять свои функции), достигается
облегчение эксплуатации 5
Формула изобретения
Имитатор импеданса руки человека, содержащий полый корпус и установленные
д в нем фрикционный демпфер, взаимодействующую с ним имитационную массу руки человека, выполненную в виде вала с буртиком в средней части, проходящего через коническую пружину сжатия, упертую одним концом в буртик вала, и регулятор жесткости
- пружины, включающий установленную с возможностью вращения втулку и связанное с ней резьбовым соединением и зафиксированное от вращения кольцо, в которое уперт другой конец пружины, отличающийся тем, что, с целью облегчения эксплуатации, он
0 снабжен второй конической пружиной сжатия, расположенной оппозитно первой пружине и упертой одним концом в буртик вала, и зафиксированным от вращения вторым кольцом, в которое уперт другой конец второй пружины и которое связано с втулкой резьбовым соединением, при этом резьбовые соединения втулки с кольцами выполнены с противоположными направлениями нарезки
А-А
5-5
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор импеданса руки человека | 1986 |
|
SU1328707A1 |
| Имитатор входного механического импеданса руки человека | 1978 |
|
SU700786A2 |
| РЕЗИНОВАЯ ВИБРООПОРА | 2017 |
|
RU2653971C1 |
| ПРОСТРАНСТВЕННЫЙ ВИБРОИЗОЛЯТОР КАРКАСНОГО ТИПА | 2017 |
|
RU2662342C1 |
| РЕЗИНОВЫЙ ВИБРОИЗОЛЯТОР АРОЧНОГО ТИПА | 2017 |
|
RU2658936C1 |
| ВИБРОИЗОЛЯТОР С ПЛОСКИМИ ПРУЖИНАМИ | 2017 |
|
RU2651395C1 |
| ВИБРОИЗОЛИРОВАННАЯ ПЛАТФОРМА | 2017 |
|
RU2672217C1 |
| ВИБРОИЗОЛИРОВАННАЯ ПЛАТФОРМА С ДЕМПФИРУЮЩЕЙ ПРУЖИНОЙ | 2017 |
|
RU2672215C1 |
| ПРОСТРАНСТВЕННЫЙ РЕССОРНЫЙ ВИБРОИЗОЛЯТОР | 2017 |
|
RU2653930C1 |
| РЕЗИНОМЕТАЛЛИЧЕСКИЙ ВИБРОИЗОЛЯТОР | 2017 |
|
RU2651403C1 |

Изобретение относится к устройствам, обеспечивающим возможность воспроизведения динамических характеристик руки человека. Цель изобретения - облегчение эксплуатации. Имитатор импеданса руки человека содержит корпус 1, в который вставлен имитирующий массу руки человека вал 2, взаимодействующий с фрикционным демпфером и двумя коническими пружинами сжатия 4 и 5 регулируемой жесткости. Регулятор жесткости пружин состоит из втулки 6, установленной в корпус 1 с возможностью вращения, и связанных с ней резьбовыми соединениями зафиксированных от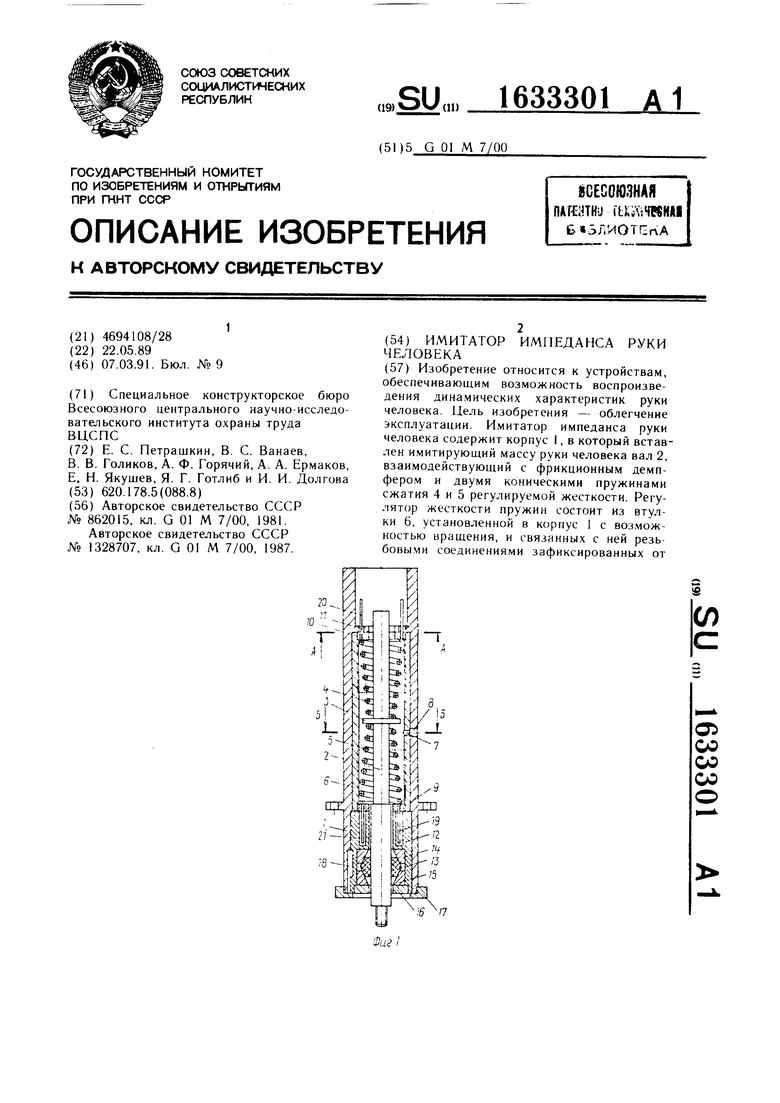
(Риг 2
Фиг 3
| Имитатор входного механического импеданса руки человека | 1978 |
|
SU862015A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Имитатор импеданса руки человека | 1986 |
|
SU1328707A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
