Изобретение относится к устройст вам, обеспечивающим возможность вос произведения динамических характери тик руки человека при испытании механизированного инструмента, наприм пневматических и электрических ручных машин вращательного и ударновращательного действия на вибрацию, ,и предназначено для имитации входного механического импеданса руки .оператора для случая одновременно вращательных и продольных колебаний инструмента при моделировании динами ческих систем оператор-машина. Известны средства, моделирующие динамические свойства руки человека предназначенные для воспроизведения входного механического импеданса . руки оператора и представляющие собой пружинно-демпфирующие устройст ва, состоящие из пружины, имитирующей жесткость руки, и дросселя, гидравлическое сопротивление которого воспроизводит активное сопротивление руки оператора. Имитаторы имеют цилиндр, заполнен ный вязкой жидкостью и закрытый верх ней и нижней крышкаьш, имеющими отверстия с сальниками, сквозь которые проходит подпружиненный шток, Недостатком таких средств является то, что они способны обеспечивать перемещение только в одном линейном направлении. По авт.св. №380968 известен имитатор входного механического импеданса руки человека, содержащий имитационную массу, основную регулировочную пружину, электромагнитный демпфер и цилиндр с размещенным в нем стаканом. В этом имитаторе динамические характеристики могут воспроизводиться только в осевом направлении. Изза этого -имитатор может быть использован только на тех стендах, на которых испытываются ручные машины с вибрацией в осевом направлении. Целью изобретения является воспроизведение импеданса руки также и при крутильных колебаниях механизированного инструмента. Для этого предлагаемый имитатор снабжен второй регулировочной пружиной с противоположной навивкой, -.дзмещенной внутри первой пружины, обе пружины жестко закреплены посредством установочных колец одними концами на корпусе электромагнитного демпфера, а другими - на шайбе
цилиндра, установленного с возмож- ностью совершения относительно стакана одновременно вращательных и продольныхколебаний. При этом пружины выполнены с параметрами, обеспечу Бающими восприятие одинаковой осевой деформации от одного по величине нагружающего враща.тельного момента.
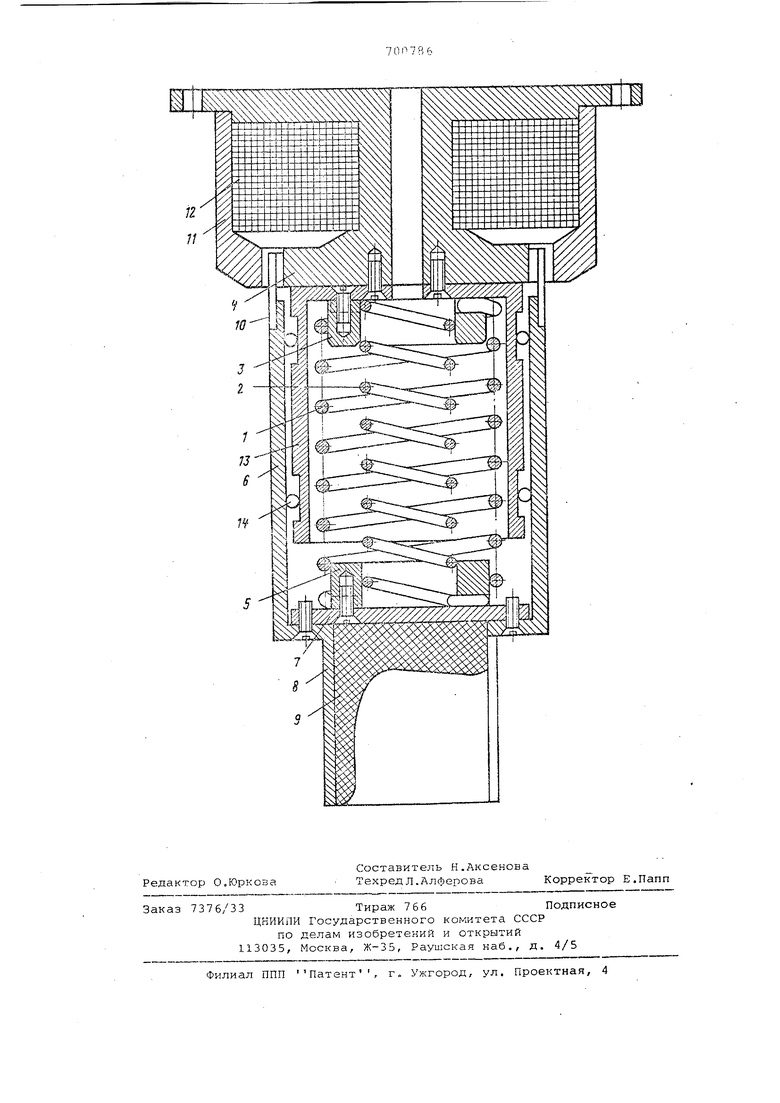
Не; чертеже изображен предлагаемый к:митатор,
Ок содержит упругий Элемент, выполненный в виде двух вставленных одна в другую регулировочных пружин 1 и 2, Пружины имеют противоположную навивку. При этом параметры пружин (толщина проволок, диаметр пружин, шаг) выбирают такие, что они имеют одинаковую осевую деформацию от одного и того же вращательного относительно оси момента. Конструкция соединения этих пружин обесг ечивает. отсутствие деформационных перемещений вдоль оси при при.ложении вращательного момента. Это достигается тем, что с одной стороны концы пружин жестко закреплены с помощью установочного кольца 3 на сердечнике 4 электромагнитного демпфера,, имитирующего всякое трение .руки,, а с другой стороны - с .помощььэ установочного кольца 5. Жестко скрепленные друг с другом, концы пружины закреплены на цилиндре 6, который представляет собой часть имитационной массы. К имитационной массе также относятся все элементы, жестко закрепленные на цилиндре 6. Это установочное кольцо 5, шайба 7, на которой устанавливается кольцо 5, посадочное кольцо 8 для крепления инструмента, а также упругий элемент 9 и замкнутое кольцо 10 корончатая с вырезами часть которог входит в зазор магнитопровода 11 электромагнитного демпфера с катушкой 12, Магнитопровод 11 имеет радиальные вырезы, что обеспечивает пересечение магнитных линий кольцом 10 как в направлении вдоль оси, так и при вращении относительно оси Цилиндр б может перемещаться как вдоль, так и относительно стакана 13, закрепленного на сердечнике 4 с ломощью шариков 14, размещенных в гнездах на внешней поверхности стакана 13,
Работа устройства заключается в слэдующем.
Во время испытания на вибрацию имитатор вместе с ручньом инструментом, например гайковертом, прижимается к приемнику узла, воспроизводящего обрабатываемую среду (на чертеже не показаны). Под действием усилия натяжения цилиндр 6 перемещается на шариках 14, пружины 1 и 2 сжимаются, замкнутое корончатое кольцо 10 входит в магнитное поле
0 демпфера. При включении ручного
инструмента в работу последний возбуждает продольные и крутильные колебания частей 5,6.7,8.9.10 имита-тора, что приводит к возникновению.
5 определенных частотнозависимых сил, препятствующих перемещению корпуса ручного инструмента. Имитатор обеспечивает колебательный режим закрепленного в нем инструмента такой
Q же, как в руках оператора в конкретном частотном диапазоне. Испытание может быть повторено при включении вращения инструмента в противоположном направлении (для реверсивного инструмента).
Предлагаемый имитатор позволяет испытывать на вибрацию широкий класс ручных инструментов враща -ельного и ударно-вращательного типа,включая и реверсивные, например гайков§рты,
0 отвертки, сверлильные машины и т.д.
Формула изобретения
1, Имитатор входного механического импеданса руки человека по авг. ев, №380968, отличающий ся тем, что,с целью воспроизведения импеданса руки также и при крутильных колебаниях механизированного 0 инструмента, он снабжен ВТОРОЙ регулировочной пружиной с противоположной навивкой, размещенной внутри первой пружины, обе пружины жестко закреплены посредством установочных с колец одними концами на корпусе электромагнитного демпфера, а другими - на шайбе цилиндра, установленного с возможностью совершения относительно стакана одновременно
вращательных и продольных колебаний.
2, Имитатор ПОП.1, отличающийся тем, что пружины выполнены с параметрс1ми, обеспечивающими восприятие одинаковой осевой деформации от одного по величине нагружающего врс1Щательного момента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор входного механического импеданса руки человека-оператора | 1980 |
|
SU979934A1 |
| Имитатор импеданса руки человека | 1986 |
|
SU1328707A1 |
| ИМИТАТОР ВХОДНОГО МЕХАНИЧЕСКОГО ИМПЕДАНСА РУКИ ЧЕЛОВЕКА | 1973 |
|
SU380968A1 |
| Имитатор входного механического импеданса руки человека для испытаний механизированного инструмента | 1975 |
|
SU530215A1 |
| Имитатор входного механического импеданса руки человека | 1978 |
|
SU862015A2 |
| Стенд для испытаний ручных механизированных инструментов вращательного действия | 1981 |
|
SU1024256A1 |
| Имитатор импеданса руки человека | 1989 |
|
SU1633301A1 |
| Стенд для испытания пневматических ручных молотков и поддержек на вибробезопасность | 1976 |
|
SU868417A1 |
| Ручная виброзащищенная машина вращательного действия | 1979 |
|
SU870084A1 |
| Антропометрический имитатор рукиОпЕРАТОРА | 1979 |
|
SU821125A1 |