1
Изобретение относится к технике измерения вибраций механизированного инструмента, а точнее к устройст вам, обеспечивающим возможность воспроизведения динамических характеристик руки человека при испытании пневматических и электрических ручных машин и предназначено для имитации входного механического импеданса руки оператора на стендах при моделировании динамической системы оператор-машина.
По основному авт.св. 380968 известен имитатор входного механического импеданса руки человека, содержащий стакан, колебательный элемент в виде цилиндра, пружину и электромагнитный демпфер LlJ
Недостатком данного имитатора является сравнительно узкий частотный диапазон воспроизведения динамики системы рука-машина. .
Целью изобретения является расширение частотного диапазона.
Указанная цель достигается тем, что имитатор снабжен установленными в стакане через шариковые опоры и последовательно соединенными друг с друге с помощью упругих элементов колебательными массами, посредством
которых пружина соединена с посадоч ным кольцом, предназначенным для крепления испытываемого ичструмента.
Колебательные массы могут быть выполнены в виде шайб с тремя равно расположенными по окружности сквозными диаметральными отверстиями и,заглублениями под шарики шариковых опор, а стакан-и цилиндр, выполнены
10 с тремя равномерно расположенными сквозными отверстиями в зоне каждой колебательной массы, одно из которых имеет диаметр, равный диаметру отверстий в колебательных массах, два других представляют собой продольные окна, ширина которых больше диаметра отверстий в колебательных массах, отверстия в цилиндре расположены напротив прорезей продольных окон ста2Qкана, а имитатор снабжен штифтами или скОбами, предназначенными для соединения колебательных масс со стаканом или цилиндром в определенной последовательности, задаваемой прогргиимой
25 испытаний инструмента, и взаимодействующими со стенками отверстия стакана цилиндра и стенкой одного из отверстий колебательных .
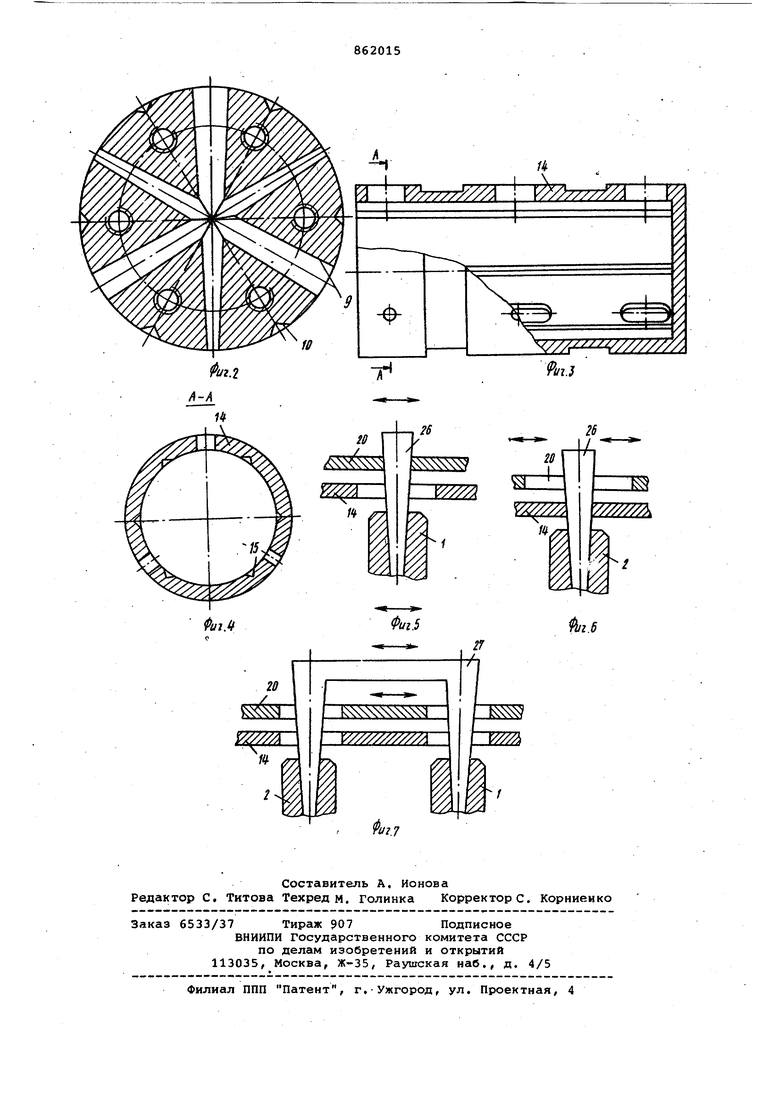
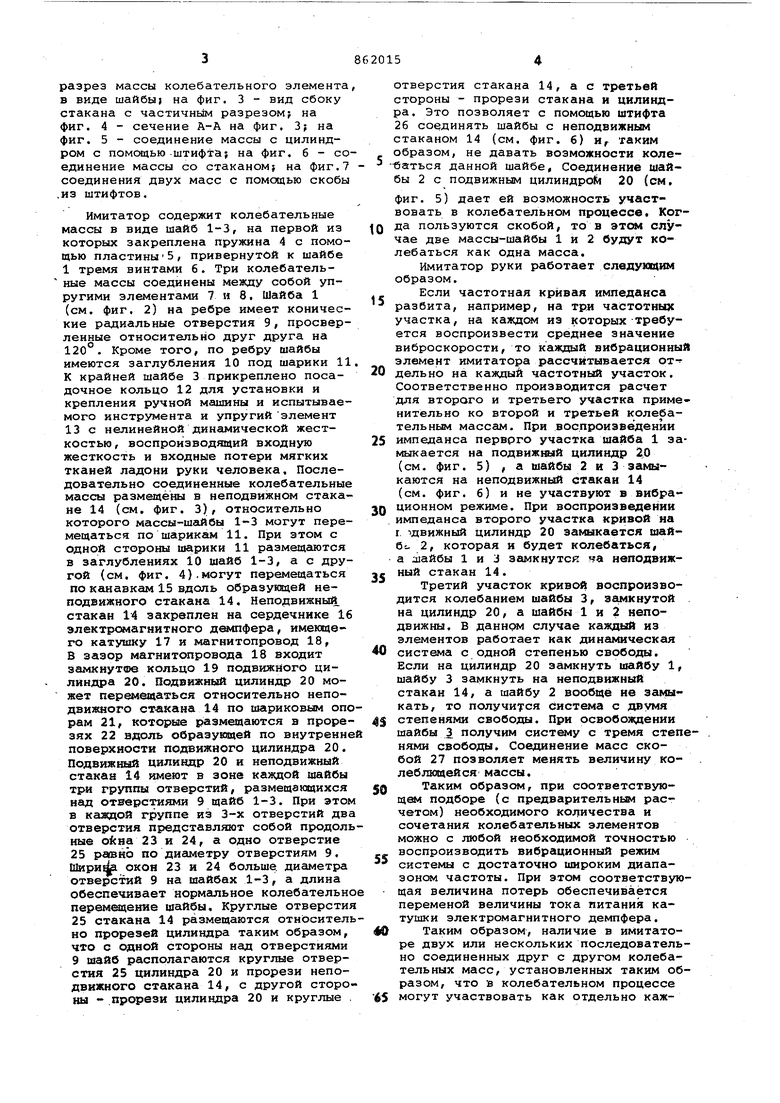
На фиг. 1 изображен общий вид ими30татора, продольный разрез на фиг.2 разрез массы колебательного элемента в виде шайбы на фиг. 3 - вид сбоку стакана с частичным разрезом на фиг. 4 - сечение А-А на фиг. 3; на фиг. 5 - соединение массы с цилиндром с помсяцью -штифта; на фиг, б - со единение массы со стаканом на фиг.7 соединения двух масс с помощью скобы .из штифтов. Имитатор содержит колебательные массы в виде шайб 1-3, на первой из которых закреплена пружина 4 с помощью пластины5, привернутой к шайбе 1 тремя винтами 6. Три колебательные массы соединены между собой упругими элементами 7 и 8. Шайба 1 (см, фиг, 2) на ребре имеет конические радиальные отверстия 9, просверленные относительно друг друга на 120°. Кроме того, по ребру шайбы имеются заглубления 10 под шарики 11 К крайней шайбе 3 прикреплено посадочное кольцо 12 для установки и крепления ручной машины и испытываемого инструмента и упругий элемент 13 с нелинейной динамической жесткостью , воспроизводящий входную жесткость и входные потери мягких тканей ладони руки человека. Последовательно соединенные колебательные массы размещены в неподвижном стакане 14 (см, фиг, 3), относительно которого массы-шг1йбы 1-3 могут перемещаться по шарикам 11, При этом с одной стороны шарики 11 размещаются в заглублениях 10 шайб 1-3, а с другой (см, фиг, 4).могут перемещаться по канавкам 15 вдоль образуквдей неподвижного стакана 14, Неподвижны стакан 14 закреплен на сердечнике 16 электромагнитного демпфера, имеющего катушку 17 и магнитопровод 18, В зазор магнитопровода 18 входит замкнутою кольцо 19 подвижного цилиндра 20, Подвижный цилиндр 20 может перемещаться относительно неподвижного ст-аКана 14 по шариковым опо рам 21, которые размещаются в прорезях 22 вдоль образующей по внутренне поверхности подвижного цилиндра 20, Подвижный цилиндр 20 и неподвижный стакан 14 имеют в зоне кайадой щайбы три группы отверстий, размещанщихся над отверстиями 9 щайб 1-3, При этом в каждой группе из 3-х отверстий дв отверстия представляют собой продоль ные ofcHa 23 и 24, а одно отверстие 25 рагвно по диаметру отверстиям 9, Шири окон 23 и 24 больше; диаметра отверстий 9 на шайбах 1-3, а длина обеспечивает нормальное колебательн перем ение шайбы. Круглые отверсти 25 стакана 14 размещаются относител но прорезей цилиндра таким образом, что с одной стороны над отверстиями 9 шайб располагаются круглые отверстия 25 цилиндра 20 и прорези неподвижного стакана 14, с другой сторо ны - прорези цилиндра 20 и круглые отверстия стакана 14, а с третьей стороны - прорези стакана и цилиндра , Это позволяет с помощью штифта 26 соединять шайбы с неподвижным стаканом 14 (см, фиг, 6) и, таким образом, не давать возможности колебаться данной шайбе, Соединение шайбы 2 с подвижным цилиндро1й 20 (см, фиг. 5) дает ей возможность участвовать в колебательном процессе. Когда пользуются скобой, то в ЭТСЯ4 случае две массы-шайбы 1 и 2 будут колебаться как одна масса, Имитатор руки работает следующим образом. Если частотная кривая импеданса разбита, например, на три частотных участка, на каждом из которых требуется воспроизвести среднее значение виброскорости, то каждый вибрационный элемент имитатора рассчитывается отдельно на каждый частотный участок. Соответственно производится расчет для второго и третьего участка применительно ко второй и третьей колебательньв массам. При воспроизведении импеданса перврго участка шайба 1 замыкается на подвижный цилиндр 2.0 (см, фиг, 5) , а шайбы 2 и 3 замыкаются на неподвижный стакан 14 (см, фиг. б) и не участвуют в вибрационном режиме. При воспроизведении импеданса второго участка кривой на I. щвижный цилиндр 20 замыкается шайб- 2, которая и будет колебаться, а Л1айбы 1 и 3 замкнутся ча неподвижный стакан 14, Третий участок кривой воспроизводится колебанием шайбы 3, з 1мкнутой на цилиндр 20, а шайбы 1 и 2 неподвижны, В данном случае каящый из элементов работает как динамическая система с одной степенью свободы. Если на цилиндр 20 замкнуть шайбу 1, шайбу 3 замкнуть на неподвижный стакан 14, а шайбу 2 вообще не замыкать, то получится система с двумя степенями свободы. При освобоящении шайбы 3 получим систему с тремя степеН51МИ свободы. Соединение масс скобой 27 позволяет менять величину колеблкдцейся массы. Таким образом, при соответствующем подборе (с предварительньм расчетом) необходимого количества и сочетания колебательных элементов можно с любой необходимой точностью воспроизводить вибрационный режим системы с достаточно широким диапазонстл частоты. При этом соответствующая величина потерь обеспечивается переменой величины тока питания катушки электромагнитного демпфера. Таким образом, наличие в имитаторе двух или нескольких последовательно соединенных друг с другом колебательных масс, установленных таким образом, что в колебательном процессе могут участвовать как отдельно каждая И8 масс/ так и в любом сочетании позволяет точнее моделировать вибрационный режим системы рука-машина в каждой полосе измеряемого частотно го диапазона. Формула изобретения 1, Имитатор входного механического импеданса руки человека по авт. св. 380968, отличающийся тем, что, с целью расширения частотного диапазона, он снабжен установленными в стакане через шариковые опоры и последовательно соединенными друг с другом с помощью упругих элементов колебательны ми массами, посредством которых пружина соединена с посадочньм кольцом, предназначенным для крепления испытываемого инструмента. 2.. Имитатор руки по п,1, о т л ичаюцийся тем, что колебательные массы выполнены в виде шайб с тремя равно расположенными по окружности сквозньали диаметральными отвер ts гз стиями и заглублениями под шарики шариковых опор, а стакан и цилиндр выполнены с тремя равномерно расположенными, сквозными отверстиями в зоне каждой колебательной массы, одно из которых имеет диаметр, равный диаметру отверстий в колебательных массах, два других представляют собой продольные окна, ширина которых больше диаметра отверстий в колебательных массах, отверстия в цилиндре расположены напротив прорезей продольных окон стакана,, а имитатор снаб« жен штифтами или скобами, предназначенными для соединения колебательных масс со стаканом или цилиндром в определенной последовательности, задаваемой программой испытаний инcTpyMeHva, и взаимодействующими со стенками отверстия стакана цилиндра и стенкой одного из отверстий колебательных масс. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР 380968, кл. G 01 М 7/00, 1970 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор входного механического импеданса руки человека | 1978 |
|
SU700786A2 |
| ИМИТАТОР ВХОДНОГО МЕХАНИЧЕСКОГО ИМПЕДАНСА РУКИ ЧЕЛОВЕКА | 1973 |
|
SU380968A1 |
| Имитатор входного механического импеданса руки человека для испытаний механизированного инструмента | 1975 |
|
SU530215A1 |
| Имитатор входного механического импеданса руки человека-оператора | 1980 |
|
SU979934A1 |
| Имитатор импеданса руки человека | 1986 |
|
SU1328707A1 |
| Магнитный вариометр | 1933 |
|
SU34661A1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| Имитатор импеданса руки человека | 1989 |
|
SU1633301A1 |
| УЛЬТРАЗВУКОВОЙ ИНСТРУМЕНТ ДЛЯ ДЕФОРМАЦИОННОЙ ОБРАБОТКИ ПОВЕРХНОСТЕЙ И СВАРНЫХ СОЕДИНЕНИЙ | 2010 |
|
RU2540230C2 |
| СТЕНД ДЛЯ УДАРНЫХ ИСПЫТАНИЙ | 2002 |
|
RU2219509C1 |