Изобретение относится к станкостроению и может быть использовано на токарных станках с ЧПУ и автоматической сменой инструмента.
Цель изобретения - упрощение конструкции устройства.
На фиг,1 схематически показан корпус устройства, общий вид; на фиг.2 - инструментальная головка, общий вид; на фиг.З - расположение базирующих поверхностей, образующих тетраэдр в положении соединения головки с корпусом; на фиг.4 - корпус с закрепленной на нем инструментальной головкой, закрепленный в револьверной головке станка; на фиг.5 - сечение А-А на фиг.4; на фиг.6 - сечение Б-Б на фиг,4; на фиг.7 - сечение В-В на фиг.5; на фиг.8 - корпус с закрепленной на нем инструментальной головкой, но для головок с вращающимся инструментом; на фиг.9 - вариант выполнения зажимных элементов; на фиг. 10 - сечение Г-Г на фиг.9; на фиг. 11 - вариант выполнения зажимных элементов; на фиг. 12 - сечение Д-Д на фиг. 11; на фиг. 13 - сечение Е-Е на фиг, 12.
Устройство содержит корпус 1 с фланцем 2, осевым отверстием 3 и хвостовиком 4, при помощи которого он устанавливается и закрепляется в отверстии 5 револьверной головки 6. На торце фланца 2 выполнены базирующие поверхности 7-10, поочередно наклоненные в разные стороны относительно поперечной плоскости корпуса. Инструментальная головка 11 содержит на торце ответные базовые поверхности 12-15 и хвостовик 16. Базирующие и базовые поверхности в положении соединения головки с корпусом расположены в плоскостях, образующих тетраэдр.
Во фланце 2 корпуса выполнены направляющие 17, в которых установлены зажимные элементы в виде рамки 18 с клиновыми поверхностями 19 и 20, предназначенными для взаимодействия с ответными клиновыми поверхностяи 21 и 22 на хвостовике. Указанные клиновые поверхности выполнены с углом, меньшим угла трения. На рамке 18 с противоположных сторон выполнены параллельные скосы 23 и 24 и выступы 25 и 26, исключающие возможность выпадания рамки из направляющих. Для перемещения рамки в процессе зажима и отжима головки служит скоба 27, один конец которой выполнен в виде двуплечего рычага 28, взаимодействующего с пружиной 29. На рычаге и другом конце скобы установлены ролики 30 и 31. предназначенные для взаимодействия со скосами 23 и 24. Скоба 27 расположена в позиции смены инструмента и закреплена на станине или установлена в направляющих и связана с приводом ее перемещения.
На инструментальной головке выполнены лыски 32 и отверстия 33, предназначенные для захвата головки роботом при ее автоматической смене, В корпусе и головке выполнены каналы 34-36 для подвода охлаждающей жидкости к инструменту.
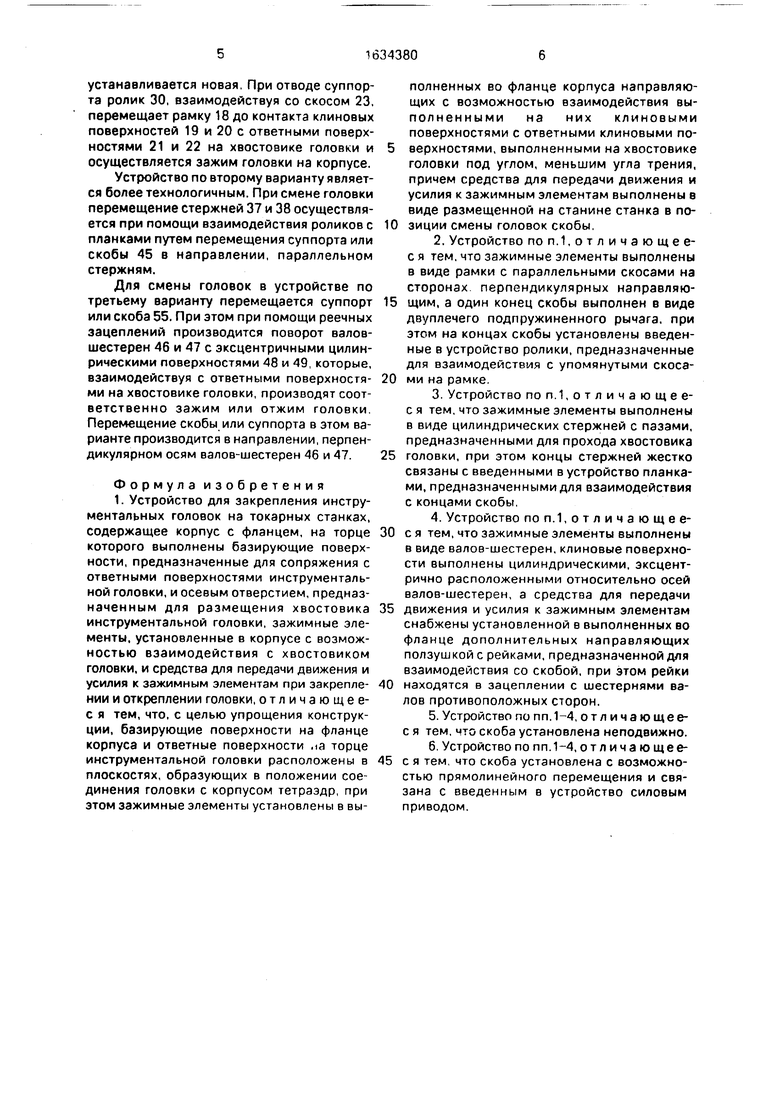
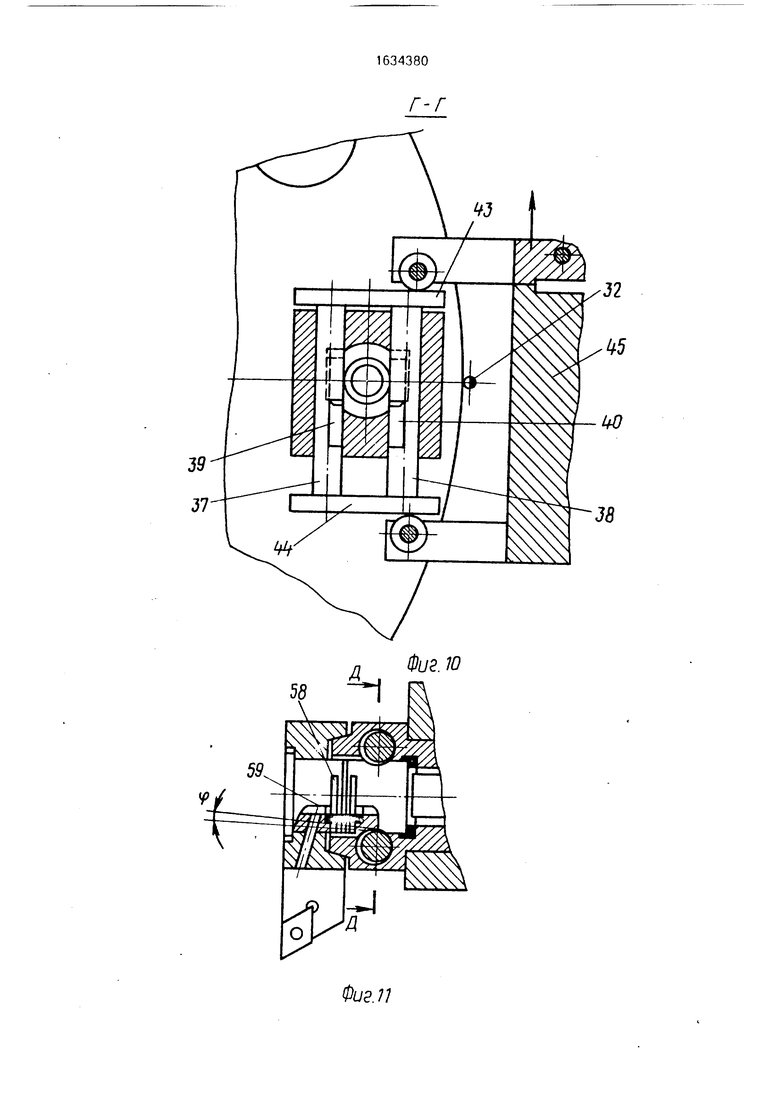
Во втором варианте исполнения устрой0 ства зажимные элементы выполнены в виде цилиндрических стержней 37 и 38 с пазами 39 и 40 для прохода хвостовика 16 головки и клиновыми поверхностями 41 и 42. Концы стержней жестко связаны с планками 43 и
5 44, а скоба 45 аналогично, как в первом варианте конструкции, установлена на станине станка жестко или с возможностью перемещения параллельно стержням от силового привода и взаимодействия роликов с
0 планками 43 и 44.
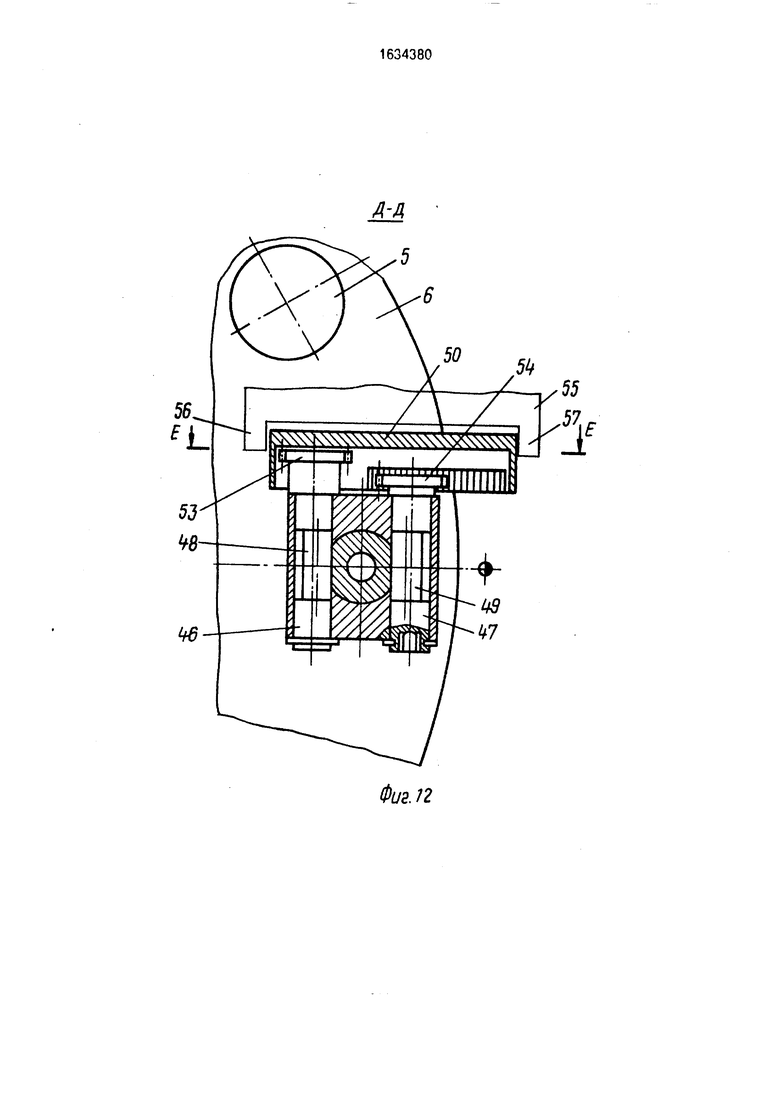
В третьем варианте исполнения устройства зажимные элементы выполнены в виде валов-шестерен 46 и 47, а клиновые поверхности - в виде эксцентричных цилиндриче5 ских поверхностей 48 и 49 на этих валах. В дополнительных направляющих, выполненных во фланце корпуса, установлена пол- зушка 50 с рейками 51 и 52, находящимися в зацеплении с шестернями 53 и 54 валов0 шестерен 46 и 47. Концы скобы 55 в виде выступов 56 и 57 охватывают ползушку 50 в позиции смены инструментальной головки, а сама скоба установлена на станине жестко или с возможностью перемещения в на5 правлении, перпендикулярном валам-шестерням от силового привода. В данном варианте исполнения устройства на хвостовике головки между базовыми и клиновыми поверхностями выполнены для компенса0 ции неточности изготовления клиновых поверхностей и гашения вибраций встречные поочередно расположенные поперечные прорези 5В, заполненные эластичным материалом 59 с целью герметизации каналов
5 для подвода охлаждающей жидкости.
В случае применения инструментальных головок с вращающимся инструментом в осевом отверстии корпуса размещается муфта 60 для соединения с приводом и муф0 та 61 для соединения со шпинделем 62 инструментальной головки.
Для автоматической смены инструментальной головки суппорт с револьверной головкой перемещается в позицию смены
5 инструмента. При этом ролик 31 скобы 27, взаимодействуя со скосом 24, перемещает рамку 18 до выхода клиновых поверхностей 19 и 20 из контакта с клиновыми поверхностями 21 и 22 хвостовика головки. Головка удаляется из корпуса и вместо нее роботом
устанавливается новая, При отводе суппорта ролик 30, взаимодействуя со скосом 23, перемещает рамку 18 до контакта клиновых поверхностей 19 и 20 с ответными поверхностями 21 и 22 на хвостовике головки и осуществляется зажим головки на корпусе.
Устройство по второму варианту является более технологичным. При смене головки перемещение стержней 37 и 38 осуществляется при помощи взаимодействия роликов с планками путем перемещения суппорта или скобы 45 в направлении, параллельном стержням.
Для смены головок в устройстве по третьему варианту перемещается суппорт или скоба 55. При этом при помощи реечных зацеплений производится поворот валов- шестерен 46 и 47 с эксцентричными цилин- рическими поверхностями 48 и 49, которые, взаимодействуя с ответными поверхностями на хвостовике головки, производят соответственно зажим или отжим головки. Перемещение скобы или суппорта в этом варианте производится в направлении, перпендикулярном осям валов-шестерен 46 и 47.
Формула изобретения 1. Устройство для закрепления инструментальных головок на токарных станках, содержащее корпус с фланцем, на торце которого выполнены базирующие поверхности, предназначенные для сопряжения с ответными поверхностями инструментальной головки, и осевым отверстием, предназначенным для размещения хвостовика инструментальной головки, зажимные элементы, установленные в корпусе с возможностью взаимодействия с хвостовиком головки, и средства для передачи движения и усилия к зажимным элементам при закреплении и откреплении головки, отличающее- с я тем, что, с целью упрощения конструкции, базирующие поверхности на фланце корпуса и ответные поверхности на торце инструментальной головки расположены в плоскостях, образующих в положении соединения головки с корпусом тетраэдр, при этом зажимные элементы установлены в выполненных во фланце корпуса направляющих с возможностью взаимодействия выполненными на них клиновыми поверхностями с ответными клиновыми по5 верхностями, выполненными на хвостовике головки под углом, меньшим угла трения, причем средства для передачи движения и усилия к зажимным элементам выполнены в виде размещенной на станине станка в по0 зиции смены головок скобы,
2.Устройство поп.1,отличающее- с я тем. что зажимные элементы выполнены в виде рамки с параллельными скосами на сторонах перпендикулярных направляю5 щим, а один конец скобы выполнен в виде двуплечего подпружиненного рычага, при этом на концах скобы установлены введенные в устройство ролики, предназначенные для взаимодействия с упомянутыми скоса0 ми на рамке.
3.Устройство поп.1,отличающее- с я тем, что зажимные элементы выполнены в виде цилиндрических стержней с пазами, предназначенными для прохода хвостовика
5 головки, при этом концы стержней жестко связаны с введенными в устройство планками, предназначенными для взаимодействия с концами скобы,
4.Устройство поп.1,отличающее- 0 с я тем, что зажимные элементы выполнены
в виде валов-шестерен, клиновые поверхности выполнены цилиндрическими, эксцентрично расположенными относительно осей валов-шестерен, а средства для передачи
5 движения и усилия к зажимным элементам снабжены установленной в выполненных во фланце дополнительных направляющих ползушкой с рейками, предназначенной для взаимодействия со скобой, при этом рейки
0 находятся в зацеплении с шестернями валов противоположных сторон.
5.Устройство по пп.1-4, отличающее- с я тем, что скоба установлена неподвижно.
6.Устройство по пп.1-4, от л ича ющее- 5 с я тем, что скоба установлена с возможностью прямолинейного перемещения и связана с введенным в устройство силовым приводом.
2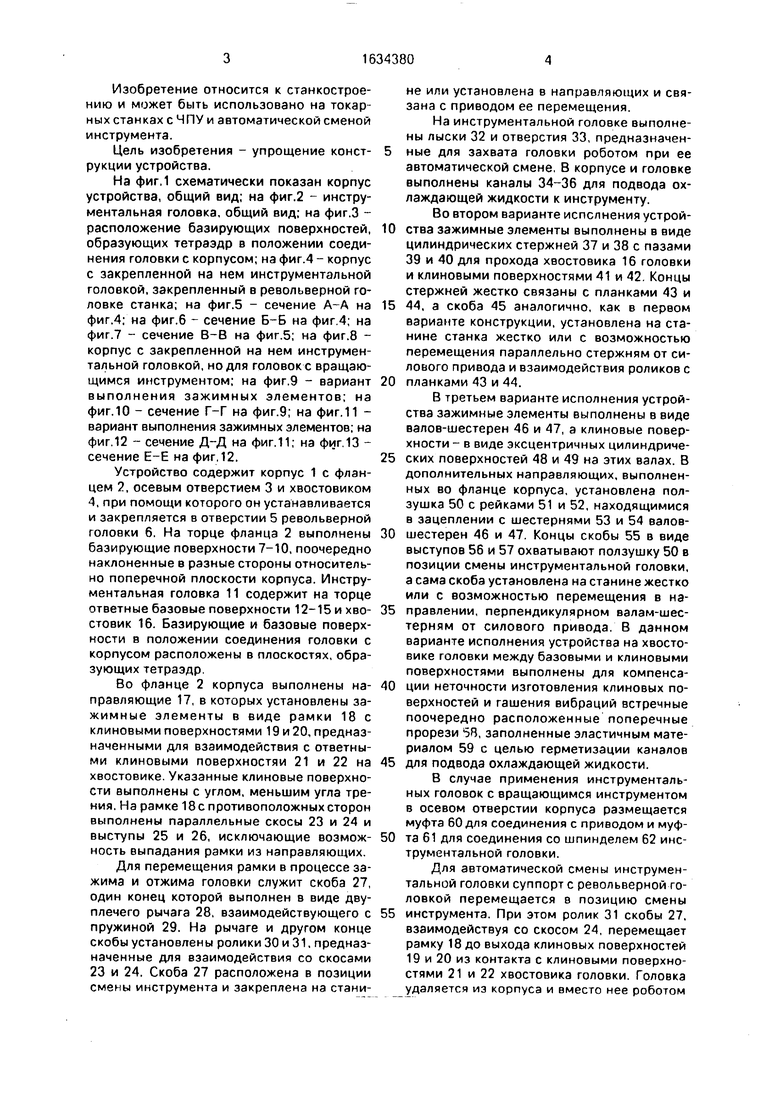
| название | год | авторы | номер документа |
|---|---|---|---|
| Револьверная головка | 1990 |
|
SU1787697A1 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Устройство для автоматической смены инструмента | 1981 |
|
SU998082A1 |
| Автоматическая револьверная головка | 1990 |
|
SU1776493A1 |
| УСТРОЙСТВО ДЛЯ ЗАЖИМА СМЕННЫХ ОРГАНОВ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1991 |
|
RU2014178C1 |
| Многооперационный станок с автоматической сменой инструмента | 1983 |
|
SU1133799A1 |
| Металлорежущий станок со сменными шпиндельными головками | 1991 |
|
SU1784443A1 |
| Револьверная головка | 1988 |
|
SU1696158A1 |
| Револьверная головка | 1984 |
|
SU1196155A1 |


Изобретение относится к станкостроению и может быть использовано на токарных станках с ЧПУ и автоматической сменой инструмента. Целью изобретения является упрощение конструкции устройства для закрепления инструментальных головок на токарных станках. Устройство содержит корпус 1 с базирующими торцовыми поверхностями и инструментальную головку 11 с ответными базовыми поверхностями, которые в положении соединения головки с корпусом расположены в плоскостях, образующих тетраэдр. В радиальных направляющих корпуса установлена рамка 18 с клиновыми поверхностями 19 и 20, предназначенными для взаимодействия с ответными клиновыми поверхностями 21 и 22 на хвостовике головки. Перемещение рамки, а следовательно, отжим и зажим головки на корпусе осуществляются посредством взаимодействия роликов 30 и 31 на скобе 27 со скосами 23 и 24 на рамке. В других вариантах устройства клиновые поверхности выполнены или на стержнях, образующих с планками аналогичную рамку, или в виде цилиндрических эксцентричных поверхностей на валах-шестернях, поворачиваемых также посредством скобы через реечные передачи. 5 з.п. ф-лы, 13 ил. в-В Ё О со со 00 о Фиг 7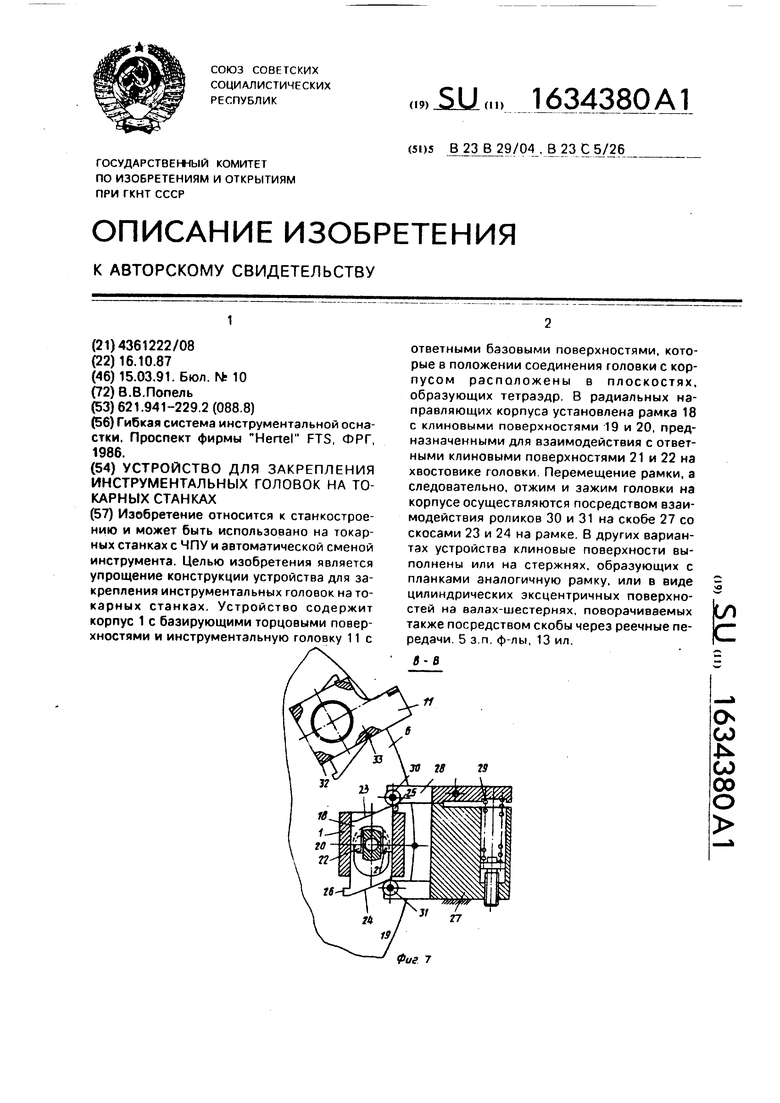
Фиг.1
1512
7Ц
/J
22 №
J5 18 19 3 JV
A-A
22В &иг. 5
Фиг. Ц
Б-Б
Фиг. 6
IS.
8Щ
oecfrcai
Фиг. ю
Фиг. П
W
Фиг. П
Фиг. 7J
| Гибкая система инструментальной оснастки | |||
| Проспект фирмы Hertel FTS, ФРГ, 1986. |
