1
(21)4602494/28
(22)06.09.88
(46) 15.03.91.. Бюл. № 10
(71)Хозрасчетный центр научно-технического творчества молодежи Союз
(72)П.И.Богатырев и Е.А.Букин
(53)621.833.6(088.8)
(56)Кулрявцев В.Н. Планетарные передачи. М.: Машиностроение, 1966, с. 11, рис. 6.
(54)ПЛАНЕТАРНЫЙ РКЛУКТОР
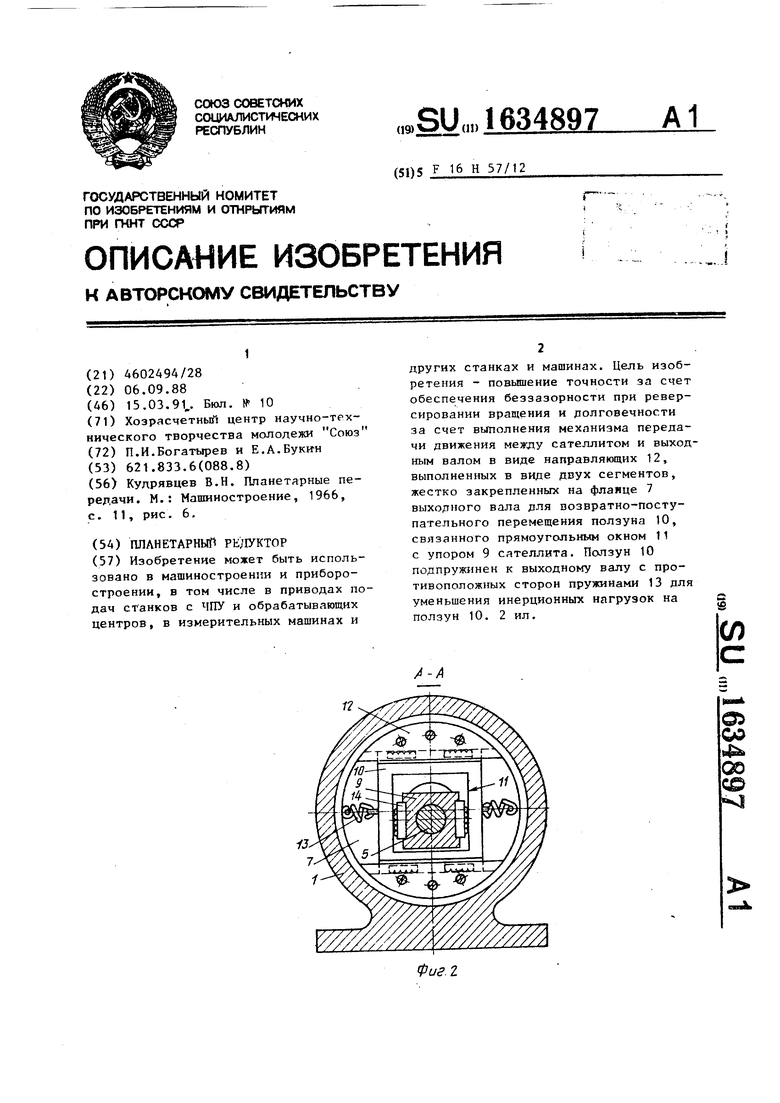
(57)Изобретение может быть использовано в машиностроении и приборостроении, в том числе в приводах подач станков с ЧПУ и обрабатывающих центров, в измерительных машинах и
других станках и машинах. Цель изобретения - повышение точности за счет обеспечения беззазорности при реверсировании вращения и долговечности за счет выполнения механизма передачи движения между сателлитом и выходным валом в виде направляющих 12, выполненных в виде двух сегментов, жестко закрепленных на фланце 7 выходного вала для возвратно-поступательного перемещения ползуна 10, связанного прямоугольным окном 11 с упором 9 сателлита. Ползун 10 подпружинен к выходному валу с противоположных сторон пружинами 13 для уменьшения инерционных нагрузок на ползун 10. 2 ил.
S
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарный редуктор | 1990 |
|
SU1740827A1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2013 |
|
RU2539438C1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИНУСОИДАЛЬНОЙ | 1971 |
|
SU310741A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
| ПЛАНЕТАРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 2000 |
|
RU2172879C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| ЛЕСОПИЛЬНАЯ РАМА | 2006 |
|
RU2329887C2 |
| Планетарный механизм и планетарная передача на его основе | 2018 |
|
RU2677952C1 |
12
&
СО
00
CD
Фиг 2
з
Изобретение относится к машиностроению и приборостроению и может быть использо вано в приводах станков с МПУ и измерительных машин.
Цель изобретения - повышение точности путем обеспечения беззазорнос- ти при реверсировании вращения и повышение долговечности.
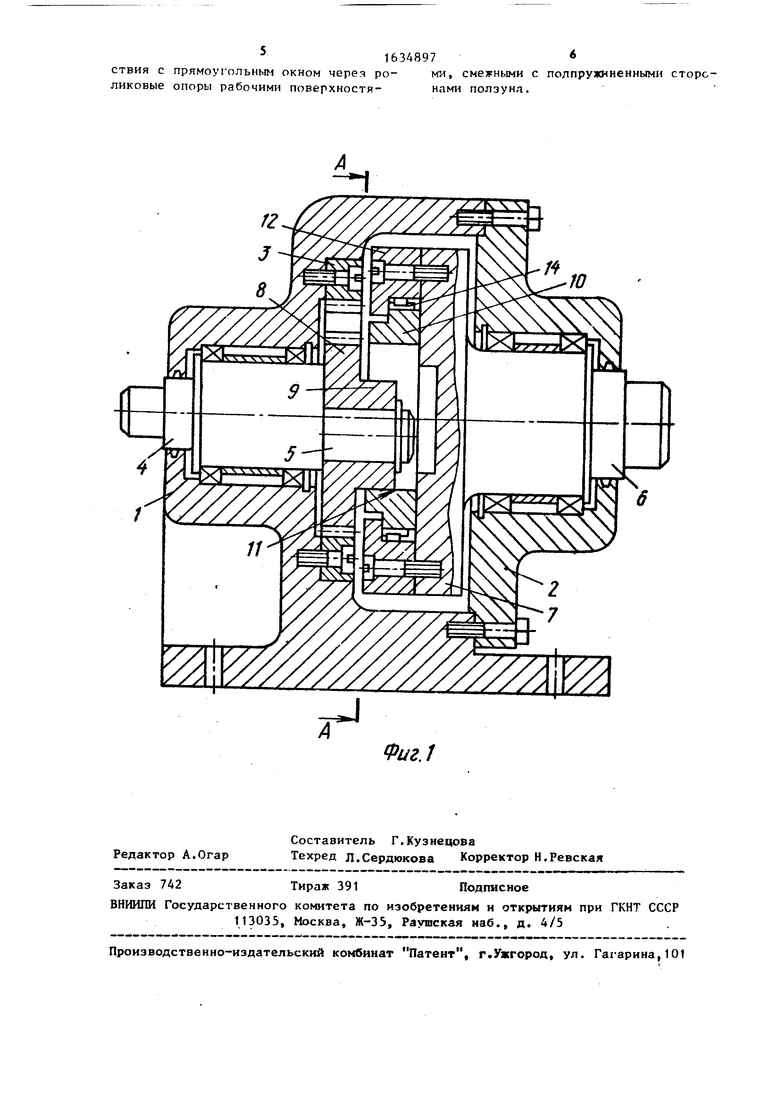
На фиг. 1 показан планетарный редуктор, разрез; на фиг. 2 - сечение А-А на фиг. 1.
Редуктор содержит корпус 1 и крышку 2, расположенные в них неподвижное центральное колесо 3 с внутренними зубьями, входной вал 4 с эксцентриком 5, выходной вал 6 с фланцем 7, установленный на эксцентрике 5 слтеллит 8 с закрепленным на торце четырехугольным призматическим упором 9, связанный механизмом передачи дяижения с выходным валом 6.
Механизм передачи движения состоит из прямоугольного ползуна 10 с прямоугольным окном 11, насаженного на призматический упор 9 сателлита 8 прямоугольным окном 11 и установленного подвижно на торце фланца 7 с возможностью возвратно-поступательного перемещения в направляющих 12, выполненных в виде двух сегментов с пазами, жестко закрепленных на противоположных сторонах торца фланца 7.
Ползун 10 подпружинен с диаметрально противоположных сторон относительно выходного вала 6 с помощью двух пружин 13, закреплённых одним концом на противоположных торцах флаца 7 , а другим - на противоположных боковых стенках ползуна 10.
Рабочие поверхности ползуна 10, смежные с подпружиненными сторонами ползуна, имеют роликовые опоры 14,
Редуктор работает следующим образом.
При включении электродвигателя (не показан) начинает вращаться входной вал 4 с эксцентриком 5. Оси эксцентрика 5 и сателлита 8 также совершают круговые вращения относительно главйой оси вращения входного вала 4 и выходного вала 6. Сателлит 8 при этом обкатывается по внутреннему зубчатому венцу неподвижного центрального колеса 3.
За один оборот входнбТо вала 4 сателлит 8, а следовательно, и выходной вал 6 совершает только часть обо
н634897
рота, равную z
- z,
L/z,, где
10
15
20
25
30
35
40
45
50
55
зубьев центрального - количество зубьев
zf - коколесателличествоса 3; т.г лита 8.
В связи с эксцентричным вращением оси сателлита 8 относительно главной оси вращения входного вала 4 призматический упор 9 сателлита, кроме вращения относительно оси эксцентрика 5, совершает возвратно-поступательное перемещение в окне 11 ползуна 10 за каждый оборот вала 4. В то же время ползун 10 также совершает возвратно- поступательное перемещение в плоскости, перпендикулярной оси вращения выходного вала 6, н в направлении, перпендикулярном направлению перемещения призматического упора 9 в окне 11. Кроме того, ползун 10 совершает вращение относительно оси вала 6 под воздействием вращения призматического упора 9. i
Для уменьшения инерционных нагрузок ползун 10 подпружинен к фланцу 7 выходного вала 6 с помощью пружин 13.
Предлагаемое выполнение механизма передачи движения сателлита 8 на выходной вял 6 обеспечивает беззазорное соединение сопряженных деталей при реверсивном вращении ведомого и ведущего валов редуктора.
Формула изобретения
Планетарный редуктор, содержащий корпус, входной с эксцентриком и выходной с фланцем валы, неподвижное центральное колесо с внутренними зубьями, сателлит, установленный на эксцентрике, и механизм передачи движения, связывающий сателлит с выходным валом, отличающийся тем, что, с целью повышения точности путем обеспечения беэзазорности при реверсировании вращения и повышения долговечности, механизм передачи движения выполнен в виде направляющих, жестко закрепленных на фланце и выполненных в виде сегментов с пазами, прямоугольного ползуна с прямоугольным окном, подпружиненного с диаметрально противоположных сторон относительно выходного вала и установленного с возможностью перемещения в пазах, и закреппеньсго на торце сателлита четырехугольного призматического упора для взаимодей516348976
ствия с прямоугольным окном через ро- ми, смежными с пояпружинеиными сторс- ликовые опоры рабочими поверхности- нами ползуна.
Фиг.1
