Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для сбора чая.
Цель изобретения - повышение производительности технологического процесса резания путем обеспечения возможности отделения флешей рабочим органом в режиме его реверсивного движения.
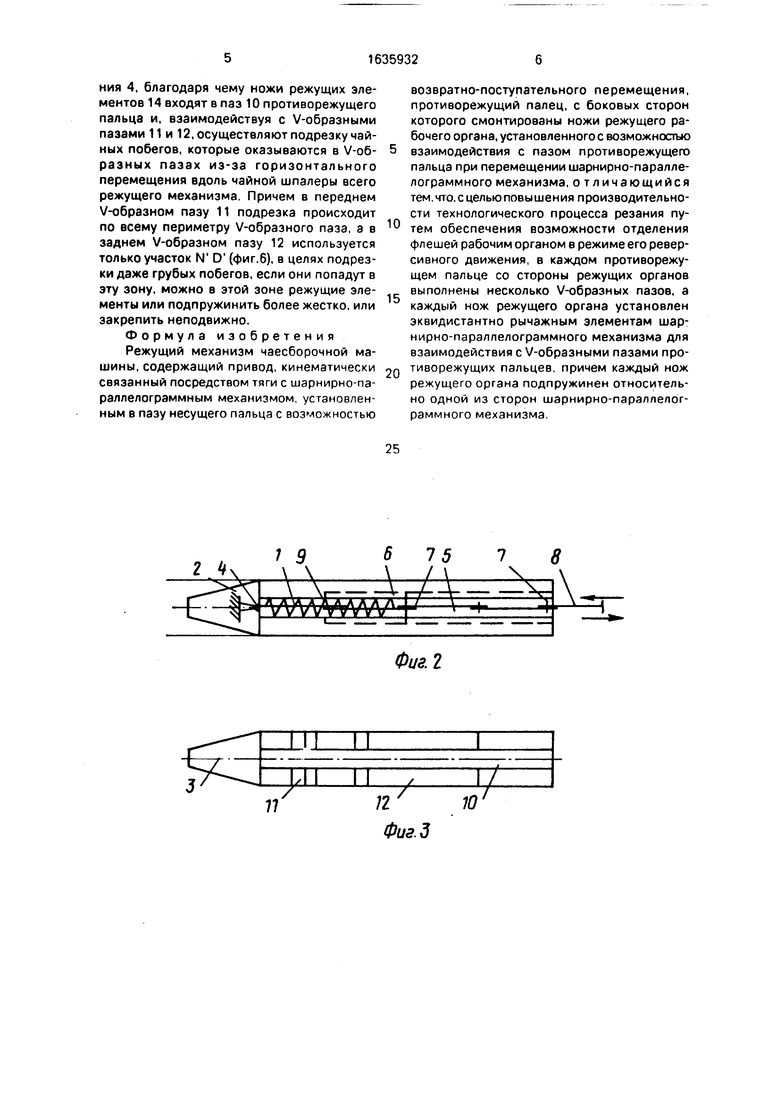
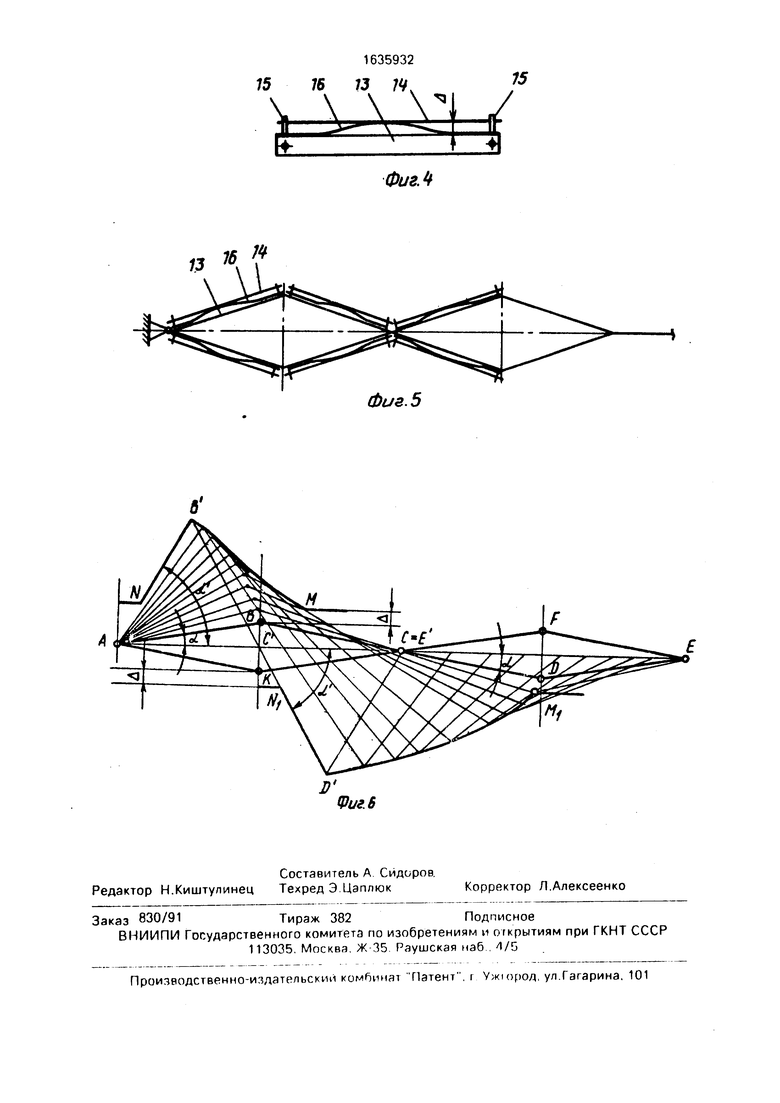
На фиг.1 изображен режущий механизм чаесборочной машины: на фиг.2 - основной несущий палец, вид сбоку; на фиг.З - проти- ворежущий палец, вид сбоку; на фиг,4 - рычажный элемент шарнирно-параллелог- раммного механизма с режущим элементом; на фиг.5 - схема расположения режущих элементов на шарнмрно-параллелограммном механизме; на фиг.6 - геометрические формы V-образных пазов противорежущих пальцев.
Режущий механизм чаесборочной машины содержит шарнирно-параллелограм- мный механизм 1, основные несущие пальцы 2, противорежущий палец 3, оконеч- ник 4 основного несущего пальца (точка неподвижного крепления), паз 5 основного несущего пальца, направляющий паз 6, направляющие пальцы 7, тягу 8, возвратный элемент9упругости, паз 10 противорежуще- го пальца, передний 11 и задний 12 V-образ- ные пазы противорежущего. пальца, рычажный элемент 13 шарнирно-параллелограммного механизма 1, режущий элемент 14, крепления 15 для режущего элемента, элемент 16 упругости режущего элемента.
Шарнирно-параллелограммный механизм 1 закреплен в пазу 5 основного несущего пальца с возможностью возвратно-поступательного перемещения вдоль оси основного несущего пальца 2 путем воздействия привода на тягу 8. Для привода может быть использован как кривошипно-шатунный механизм, так и кулачковый механизм (не показано). В последнем случае для возврата в исходное положение используется возвратный элемент 9 упругости. Шарнирно-параллелограммный механизм 1 закреплен неподвижно в начале основного несущего пальца. Для обеспечения прямолинейного перемещения шарнирно-параллелограммного механизма предусмотрены направляющие пальцы 7, которые перемещаются в направляющем пазу 6. На противорежущем пальце 3. изготовленном с пазом 10, имеются V-об- разные пазы - передний V-образный паз 11 и задний V-образный паз 12, взаимодействуя с которыми режущие элементы 14. закрепленные на рычажных элементах шарнирно-параллелограммного меха ни з0
5
0
5
0
5
0
5
0
5
ма, производят подрезку побегов, причем вследствие того, что режущие элементы 14 закреплены на рычажных элементах 13 подпружиненное помощью креплений 15 и элемента 16 упругости, сначала происходит прощупывание побега и если он окажется грубым, то режущий элемент 14 не сможет его срезать, так как жесткость элемента 16 упругости рассчитана на подрезку нежных побегов. Ножи режущих элементов 14 закреплены эквидистантно на шарнирно-па- раллелограммом механизме 1.
Конфигурация V-образных пазов 11 и 12 противорежущего пальца, изображенных на фиг.6, определяется в зависимости от траекторий движения точек В и D. Сторона N переднего V-образного паза 11 делает-, ся параллельной крайнему положению рычажного элемента АВ , а вторая сторона прочерчивается по траектории движения элемента ВС. Также вычерчивается конфигурация зэднего V-образного паза 12. Сторона NiD делается параллельной крайнему положению рычажного элемента С Ь , а вторая сторона прочерчивается по траектории движения точки D. Причем при изготовлении допускается замена криволинейных поверхностей ломаной линией. Точки N, M, NI, Mi получаются в результате пересечения сторон V-образных пазов с горизонтальной линией, которая проходит на расстоянии Д от точек В и К, а величина Д берется в зависимости от диаметра стебля d и примерно равняется (2-3)d. На фиг.6 показаны траектории рычажных элементов 13, но без режущих элементов 14, т.е. подразумевается, что режущие элементы 14 заходят за кромки V-образных пазов. Выбор криволинейной конфигурации В М позволяет производить подрезку побегов режущим элементом на рычаге ВС как в прямом, так и в обратном движении.
Ра мещение режущего механизма осуществляется по всей поверхности чайных шпалер в виде изогнутой гребенки с асинхронной работой двух соседних шарнирно- параллелограммных механизмов 1. Частота возвратно-поступательного перемещения устанавливается экспериментально.
Режущий механизм чаесборочной машины работает следующим образом.
Привод (кривошипно-шатунный или кулачковый механ изм)передает тяге 8 возвратно-поступательное перемещение по продольной оси, вследствие чего увеличивается расстояние между боковыми шарнирами шарнирно-параллелогрэммного механизма 1 из за наличия точки 4 неподвижного крепления 4. благодаря чему ножи режущих элементов 14 входят в паз 10 противорежущего пальца и, взаимодействуя с V-образными пазами 11 и 12, осуществляют подрезку чайных побегов, которые оказываются в V-об- разных пазах из-за горизонтального перемещения вдоль чайной шпалеры всего режущего механизма. Причем в переднем V-образном пазу 11 подрезка происходит по всему периметру V-образного паза, а в заднем V-образном пазу 12 используется только участок N D (фиг.б), в целях подрезки даже грубых побегов, если они попадут в эту зону, можно в этой зоне режущие элементы или подпружинить более жестко, или закрепить неподвижно.
Формула изобретения Режущий механизм чаесборочной машины, содержащий привод, кинематически связанный посредством тяги с шзрнирно-па- раллелограммным механизмом, установленным в пазу несущего пальца с возможностью
0
5
0
возвратно-поступательного перемещения, противорежущий палец, с боковых сторон которого смонтированы ножи режущего рабочего органа, установленного с возможностью взаимодействия с пазом противорежущего пальца при перемещении шарнирно-паралле- лограммного механизма, отличающийся тем, что. с целью повышения производительности технологического процесса резания путем обеспечения возможности отделения флешей рабочим органом в режиме его реверсивного движения, в каждом противорежу- щем пальце со стороны режущих органов выполнены несколько V-образных пазов, а каждый нож режущего органа установлен эквидистантно рычажным элементам шар- нирно-параллелограммного механизма для взаимодействия с V-образными пазами про- тиворежущих пальцев, причем каждый нож режущего органа подпружинен относительно одной из сторон шарнирно-параллелог- раммного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧИЙ ОРГАН ЧАЕСБОРОЧНОГО АППАРАТА | 1991 |
|
RU2017378C1 |
| Ручной чаесборочный аппарат | 1986 |
|
SU1454303A1 |
| Рабочий орган чаесборочной машины | 1989 |
|
SU1660614A1 |
| СЕКЦИЯ ЧАЕСБОРОЧНОГО АППАРАТА | 1973 |
|
SU382380A1 |
| Машина для формовки шпалер чайных кустов и срезывания с них побегов | 1934 |
|
SU43228A1 |
| Навесное устройство для обрезки плодовых деревьев в пальметтном саду и чеканки виноградной лозы | 1978 |
|
SU735218A1 |
| ЧАЕУБОРОЧНАЯ МАШИНА | 1972 |
|
SU353674A1 |
| Чаесборочный аппарат | 1989 |
|
SU1672969A1 |
| "Режущий аппарат чаесборочной машины | 1977 |
|
SU641912A1 |
| Чаесборочный аппарат | 1986 |
|
SU1586592A1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для сбора чая Цель изобретения - повышение производительности технологического процесса резания путем обеспечения возможности отделения флешей рабочим органом в режиме его реверсивного движения. Привод кинематически связан посредством тяги 8 с шарнирно-параллелограм- мным механизмом 1. закрепленным в начале основного несущего пальца 2 и размещенным . -Л / в пазу пальца 2 с возможностью возвратно- поступательного перемещения вдоль продольной оси паза Режущий орган установлен с возможностью взаимодействия с пазом противорежущего пальца 3 при перемещении шарнирно-параллелограммного механизма 1. Каждый противорежущий палец 3 выполнен с несколькими V-образными пазами. Ножи режущего органа установлены эквидистантно рычажным элементам шарнирно-параллелограммного механизма 1 со стороны противорежущего пальца 3 с возможностью взаимодействия с V-образными пазами каждого противорежущего пальца 3 Ножи режущего органа подпружиненно закреплены на рычажных элементах шарнирно-параллелограммного механизма 1. Подрезка флешей осуществляется сразу в двух направлениях, при этом возможно прощупывать побеги и срезать их в нужном месте, поскольку режущие элементы закреплены подпружиненно и могут срезать только нежные побеги Каждые соседние шарнирно-па- раллелограммные механизмы работают асинхронно 6 ил 1 П (Л о со ел о со 1ЧЭ фиг.1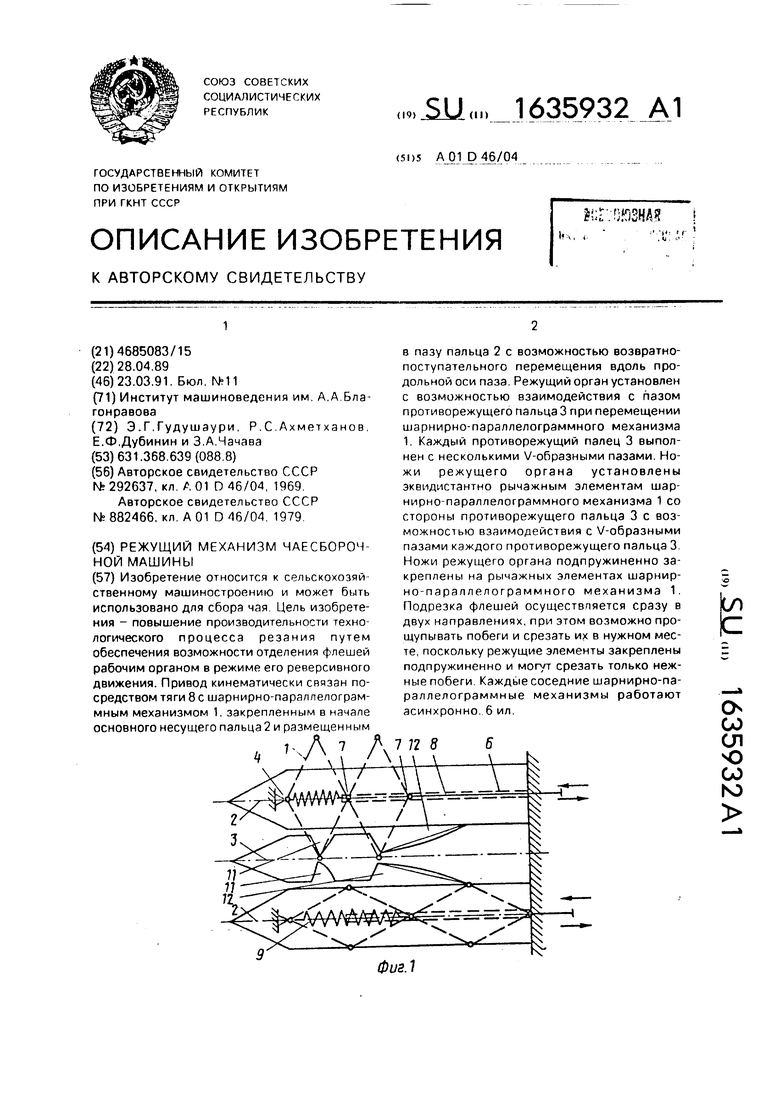
Фиг. 2
1635932
15 76 73 7V k
16
15
ФигА
Фиг. 5
| ЧАЕПОДРЕЗОЧНЬШ И ЧАЕСВОРОЧНЬЕМАППАРАТАМ | 0 |
|
SU292637A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
