Изобретение относится к оптическим методам исследования объектов, содержащих прозрачные неоднородности показателя преломления (фазовых объектов) , и может быть использовано для технологического контроля процессов в различных отраслях народного хозяйства, например в химической, электронной, оптикомеханической, пищевой промышленности, а также в гидроаэродинамике, физике плазмыг теплофизике .
Цель изобретения - повышение точности и расширение динамического диа - пазона.
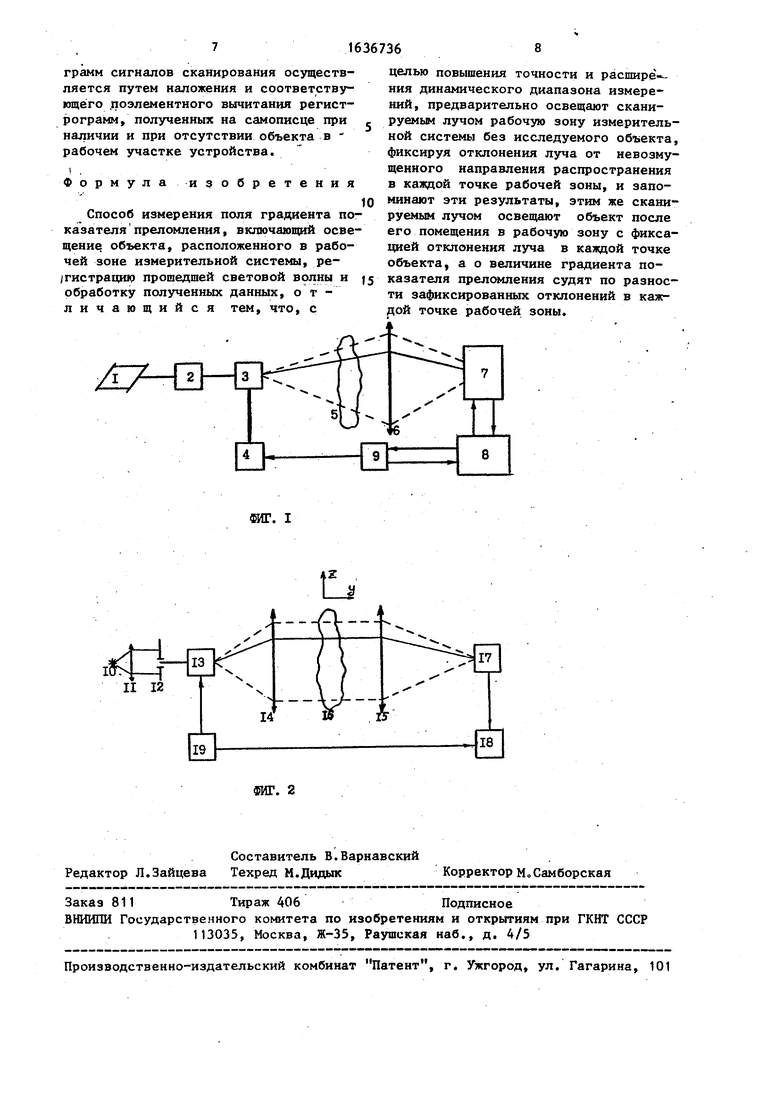
На фиг.1 и 2 представлена блок- схема устройств, реализующих способ.
Устройство (фиг.1; содержит лазер 1, оптическую систему 2, зеркальный восьмигранный барабан 3, связанный механической связью с шаговым двигателем 4, исследуемый объект 5, оптическую систему 6, сопряженную с фотодиодной матрицей 7, которая связана с,ЭВМ 8, блок 9 КАМАКа, связанный с ЭВМ 8 и с шаговым двигателем 4.
Устройство (фиг.2) содержит тепловой источник 10 света, коллимирую- щую систему 11, диафрагму 12, магнитоэлектрический сканер 13, оптическую системуу образованную двумя объективами 14 и 15. между которыми находится исследуемый объект 16, квадратный координатно-чувствительный фотоО СО
о
со с&
приемник (КЧФ) 17, связанный с многоканальным самописцем 18, и генератор 19, связанный с самописцем 18 и со сканером 13.
Устройство (фиг.1) работает следующим образом.
Свет, генерируемый лазером 1, преобразуется оптической системой 2 с целью получения требующегося прост- ранственного разрешения и попадает .на зеркальный восьмигранный барабан 3, который приводится во вращение с помощью шагового двигателя 4. Управление шаговым двигателем осуществля- ется ЭВМ 8 через блок 9 КАМАКа. Лазерный пучок, пространственное положение которого в данный момент времени определяется уровнем управляющих напряжений на двигателе 4, вырабаты- ваемых блоком 9 КАМАК по команде с ЭВМ 8, проходит через исследуемый объект 5. На выходе из объекта 5 лазерный пучок отклоняется на угол, величина которого определяется интеграль- ньм по длине пучка значением градиента показателя преломления. Отклоненный лазерный пучок проходит через оптическую систему 6, которая в заданном масштабе строит изображение объ- екта 5 на светочувствительной поверхности фотодиодной матрицы 7. На выходе этой матрицы формируется элект рический сигнал, содержащий информацию о положении на ее поверхности лазерного пучка в соответствующий момент времени. Синхронизация сканирования и приема осуществляется за счет того, что сканированием и приемом информации управляет ЭВМ. В памяти машины хранится информация о совокупности координат лазерного пучка на поверхности фотодиодной матрицы 7 при сканировании рабочего участка в случае отсутствия в нем исследуемого объекта. При этом запоминаются искажающие полезную информацию паразитные отклонения, вызванные, например, аберрациями оптической системы б и низким качеством стекла, из которого выполнены защитные окна рабочей частио На втором этапе измерений, когда зондирование рабочего участка осуществляется при наличии в нем исследуемого объекта 5, также происходит прием в ЭШ 8 совокупности координат на поверхности фотодиодной матрицы 7 лазерных пучков, отклоненных объектом 5, и разностная обработка
0
5
0
5
0
5
этих координат с учетом полученной на первом этапе измерений соответствующей совокупности координат. По полученной разностной совокупности координат с помощью ЭШ вычисляется распределение градиента показателя преломления в объекте.
Устройство (фиг.2)работает следующим образом.
С помощью коллимирующей системы 11 и диафрагмы 12 формируется узкий пучок света, источником которого является тепловой источник 10. Узкий пучок света попадает на магнитоэлектрический сканер 13, представляющий собой зеркало, управляемое по углу наклона с помощью электрического сигнала, вырабатываемого генератором 19. Отклоненный сканером узкий пучок света преобразуется объективом 14, прог свечивает исследуемый объект 16, испытывая отклонение на неоднородностях показателя преломления, преобразуется объективом 15 и попадает на поверхность квадрантного координатно-чувст- вительного фотоприемника 17. При этом зеркало сканера 13 и фоточувствительная поверхность фотоприемника 17 являются сопряженными с помощью оптической системы, образованной объективами 14 и 15. Электрический сигнал с КЧФ 17 пропорционален положению светового пучка на его поверхности и регистрируется с помощью самописца 18. На другой канал самописца 18 подается сигнал с генератора 19, уп- равляющего сканером 13 и дающего информацию о координате сканируемого луча. На первом этапе записывается сигнал КЧФ 17 полученный при отсутствии в рабочем участке объекта, а на втором этапе - при наличии объекта 16. Разностная обработка сигнала осуществляется путем вычитания соответствующих показаний, полученных во втором и в первом случае.
Сущность изобретения состоит в том, что зондирование исследуемого объекта осуществляется узким по сравнению с его пространственным мас- штабом пучком света, который сканируется, освещая все излучаемое пространство объекта. Синхронно со сканированием осуществляется регистрация угла рефракции зондирующего пучка, а также разностная обработка информации, получаемой при освещении рабочего участка при наличии и при
отсутствии в нем исследуемого объек- та. Повышение точности и расширение динамического диапазона измерения распределения градиента показателя преломления обеспечивается тем, что информация не искажается, так как нет наложения лучей света, прошедших через отдельные участки объекта. Кроме того, так как фиксируется информация только о положении (координате) прошедшего через объект светового пучка, повышение точности обеспечивается также за счет исключения влияния на полезную информацию паразитных флуктуации интенсивности прошедшего через объект пучка света (вследствие флуктуации интенсивности зондирующего пучка или по другим причинам).
Кроме того, применение разностного способа обработки информации позволяет также повысить точность и расширить динамический диапазон измерений за счет исключения из результатов измерений стационарных паразитных эффектов, вызывающих изменение освещенности в теневой картине известного способа, например таких как низкое качество оптических элементов измерительной системы. При этом повышение точности и расширение динамического диапазона достигаются в сочетании со сканированием и фиксацией отклонения луча от невозмущенного направления вследствие проявления этими признаками указанных свойств.
Пример. Способ был реализован с помощью устройства (фиг.2). Свет от ртутной лампы типа ДРШ-250 колли- мируется с помощью линзы. Круглая диафрагма 12 диаметром 0,5 мм вырезает узкий пучок света, попадающий на сканер 13, который представляет собой зеркало, закрепленное на токопроводя- щей рамке, помещенной в поле постоянного магнита. Сканер 13 осуществляет строчную развертку зондирующего луча
и выполнен на базе магнитоэлектричес- 50 является паспортной характеристикой
5
0
5
15 ТАИР-3. Таким образом, при освещении оптически однородного участка пучок света остается неподвижньм на поверхности фотоприемника 17 при сканировании зондирующего пучка света. При отклонении зондирующего пучка в объекте на угол
л 1 Г n , в -Hi I 3Z d У
где
z п
- показатель преломления среды, окружающей изучаемый объект; n r показатель преломления
объекта;
L - протяженность объекта вдоль направления зондирования у; Z - направление сканирования, происходит смещение светового пучка на поверхности фотоприемника вдоль оси Z на величину
Д f67 ,
где f - фокусное расстояние объектива ТАИР-3 (f 300 мм). Так, еслиЗп/Эг 1/см, a L 20 см и объект находится в воздухе, то
9г
п
о
-4
Эп
Sz
2
2
ф
10 рад. ЈД
300 -2- 10 6 -10 мм 60 мкм
и может быть надежно зарегистрировано квадрантным фотодиодом. Так, если фотодиод имеет крутизну координатной характеристики 10 В/мм, то на выходе КЧФ имеем сигнал с амплитудой, равной 0,6 В. Этот сигнал регистрируется самописцем. Сигнал КЧФ не зависит при этом от интенсивности свето- вого пучка на поверхности КЧФ в широком диапазоне изменения интенсйвнос- тей, а градуировка сводится к получению координатной характеристики КЧФ, которая может быть снята один раз и
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения распределения градиента показателя преломления | 1990 |
|
SU1770847A1 |
| Способ исследования распределения параметров рассеивающих частиц | 1989 |
|
SU1642326A1 |
| Устройство для измерения градиента показателя преломления | 1990 |
|
SU1704038A1 |
| СПОСОБ ОПТИЧЕСКОЙ ТОМОГРАФИИ СВЕТОЧУВСТВИТЕЛЬНЫХ МАТЕРИАЛОВ | 2008 |
|
RU2377539C1 |
| Способ определения профиля показателя преломления оптических неоднородностей | 1989 |
|
SU1695184A1 |
| Способ неконтактного подрыва и неконтактный датчик цели | 2021 |
|
RU2771003C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2015 |
|
RU2659720C1 |
| Способ определения профиля показателя преломления оптических неоднородностей и устройство для его осуществления | 1990 |
|
SU1777053A1 |
| Устройство для измерения оптической разности хода | 1990 |
|
SU1787266A3 |
| Устройство для измерения размеров микрочастиц в жидкости | 1990 |
|
SU1807337A1 |
Изобретение относится к оптическим методам исследования физических свойств объектов, влияющих на параметры зондирующей световой волны, и может быть использовано в химической электронной, оптико-механической, пищевой промышленности и т.д. Цель изобретения - повышение точности и расширение динамического диапазона. Способ заключается в просвечивании исследуемого объекта световой волной и регистрации фазовых искажений этой волны после прохождения через объект. Положительный эффект достигается просвечиванием объекта узким (по сравнению с его пространственным масштабом) пучком света и регистрацией информации о положении прошедшего через объект светового пучка. Измерения проводятся в два этапа: сначала при отсутствии в рабочем участке объекта а затем - при его наличии, с разностной обработкой получаемой информации. 2 ил. (Л
кого гальванометра и постоянного магнита. Зеркало сканера находится в передней фокальной плоскости осветительного объектива 14 ТАИР-3. Таким образом, объект 16 просвечивается 55 Синхронизация сканирования и приема параллельно перемещающимся при ска - - информации осуществляется путем нировании пучком света. Квадрантный записи на второй канал самописца уп- фотоприемник 17 находится в задней фо- равняющего сканером напряжения от калькой плоскости приемного объектива генератора Г6-27. Вычитание регистреустроиства
Управление сканером осуществляется симметричным треугольным импульсом, вырабатываемым генератором Г6-27.
грамм сигналов сканирования осуществляется путем наложения и соответствующего .поэлементного вычитания регист- рограмм, полученных на самописце при наличии и при отсутствии объекта в - рабочем участке устройства. i Формула изобретения
Способ измерения поля градиента показателя преломления, включающий освещение объекта, расположенного в рабочей зоне измерительной системы, ре- /гистрацию прошедшей световой волны и обработку полученных данных, отличающийся тем, что, с
ФИГ. I
целью повышения точности и расшире4-- ния динамического диапазона измерений, предварительно освещают сканируемым лучом рабочую зону измерительной системы без исследуемого объекта, фиксируя отклонения луча от невозмущенного направления распространения в каждой точке рабочей зоны, и запоминают эти результаты, этим же сканируемым лучом освещают объект после его помещения в рабочую зону с фиксацией отклонения луча в каждой точке объекта, а о величине градиента показателя преломления судят по разности зафиксированных отклонений в каждой точке рабочей зоны.
| Физические измерения в газовой динамике и при горении./Иод ред | |||
| Р.У.Ладенбурга | |||
| - М.: Изд-во иностранной литературы, 1957, с.49-67 | |||
| Васильев Л.А.Теневые методы | |||
| - М.: Наука, 1968, с.14-20. |
