Изобретение относится к строительству и может быть использовано при сооружении трубопроводов из железобетонных и бетонных труб с раструбно-винтовым соединением.
Цель изобретения - повышение надежности и снижение трудоемкости монтажа труб с раструбно-винтовым соединением за счет автоматизации центрирования резьбовых концов монтируемых труб и фиксации их захватов.
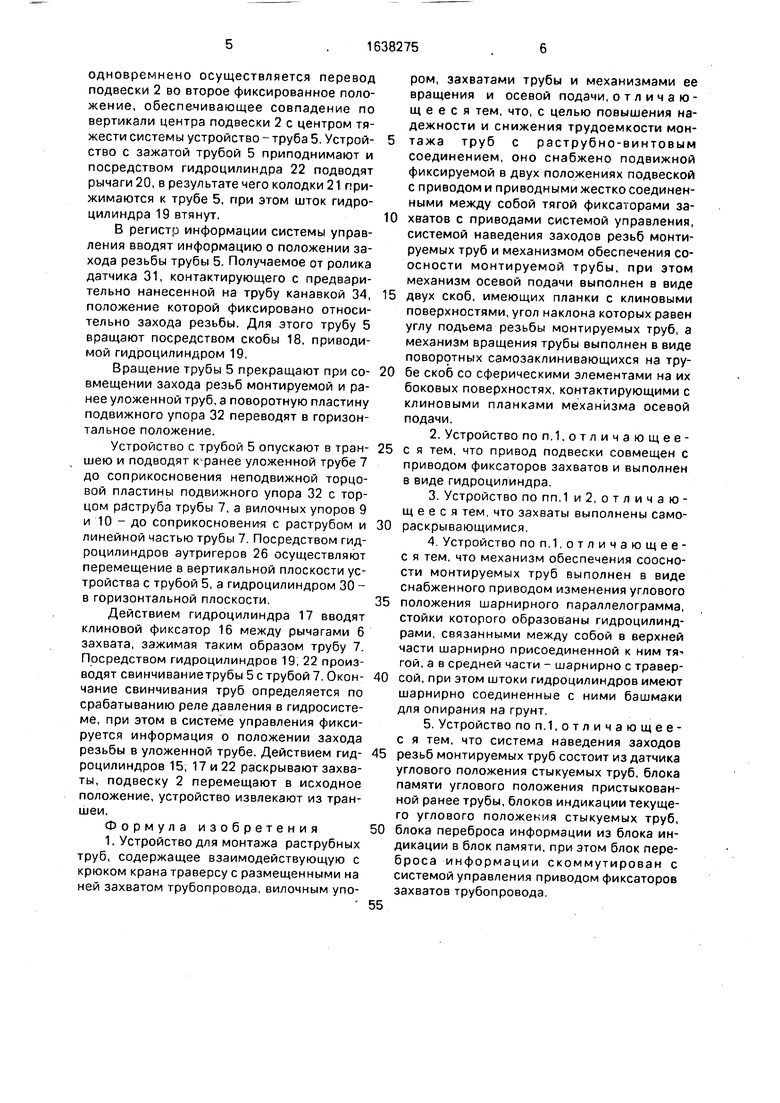
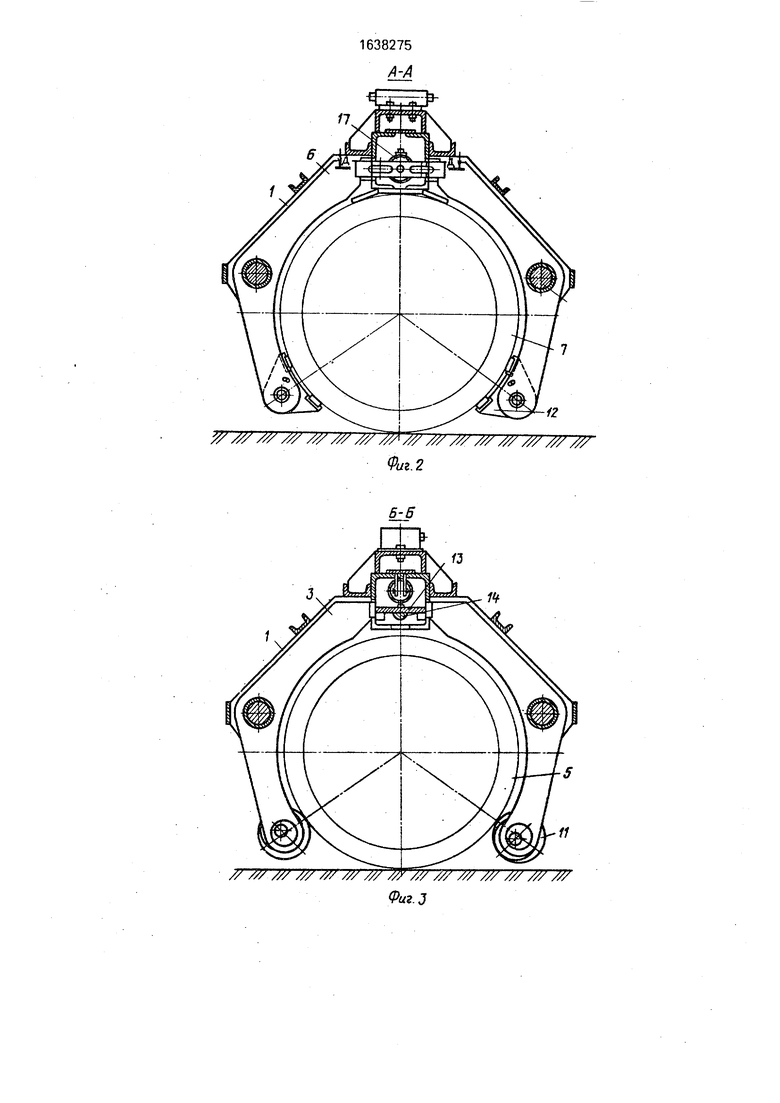
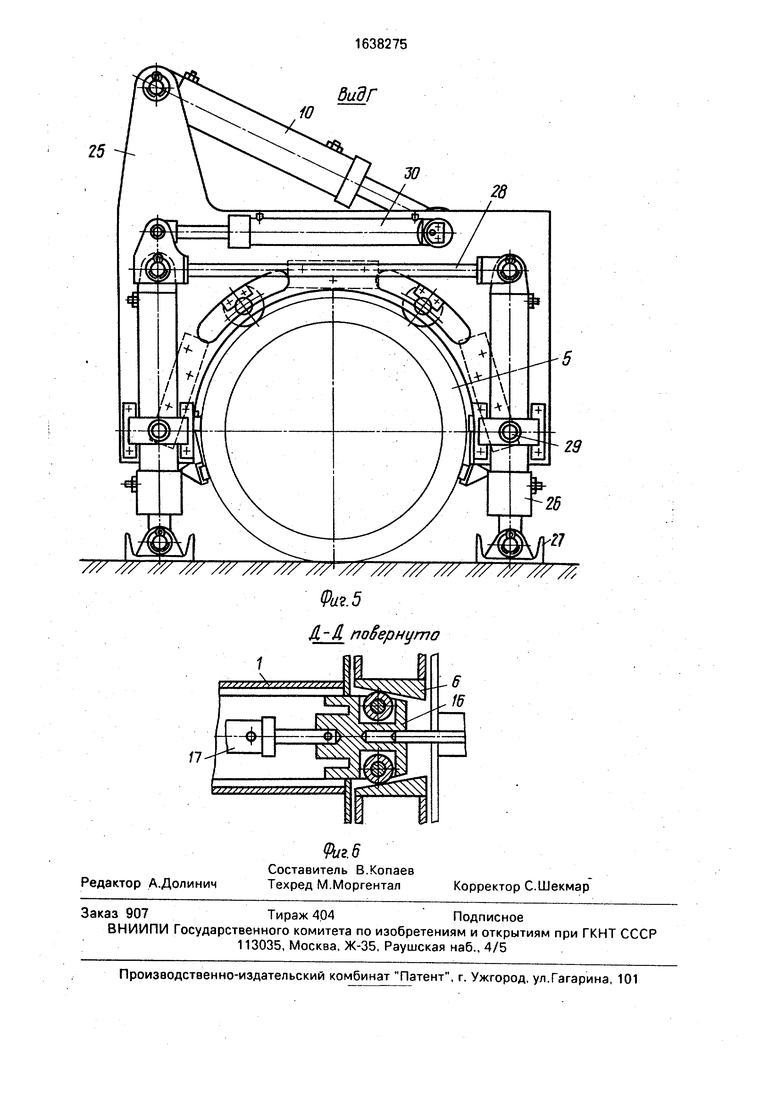
На фиг.1 изображено устройство, вид сбоку; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - разрез В-В на фиг.1; на фиг.5 - вид Г на фиг.1; на фиг.6 - разрез Д-Д на фиг.2.
Устройство состоит из траверсы 1, подвески 2, взаимодействующей с крюком грузоподъемного механизма, захватов 3 и 4 монтируемой трубы 5, захвата 6 ранее уложенной трубы 7; привода 8 вращения и осевой подачи трубы 5, вилочного упора 9, сопрягаемого с раструбом трубы 7 и вилочного упора 10, сопрягаемого с линейной частью трубы 7.
Захваты 3,4 и 6 выполнены в виде рычагов, которые поворотно закреплены между щек траверсы 1. В нижней части рычагов захватов 3,4 смонтированы ролики 11, оси которых располагаются под углом к образующей трубы 5, что позволяет произвести осевую подачу при ее вращении. В нижней части рычагов захвата 6 поворотно закреплены зажимные колодки 12с ограниченным углом качения. Центры тяжести рычагов захватов 3,4,6 смещены к центру зажимаемой трубы. Верхняя часть рычагов захватов 3,4 при зажиме трубы 5 фиксируется пластиной 13, соединенной с тягой 14 с подвеской 2, смонтированной на соединенной траверсе 1 с возможностью продольного перемещения посредством гидроцилиндра 15. Перемещение подвески 2 фиксируется в двух положениях, в одном из которых ее центр совпадает с центром тяжести устройства без трубы 5, а в другом с центром тяжести системы устройство - труба 5. При зажиме трубы 7 рычаги захвата 5 запираются центрируемым клиновым роликовым фиксатором 16, закрепленным на штоке гидроцилиндра 17 ( см, фиг.6).
Привод 8 вращения и осевой подачи трубы 5 выполнен в виде двух скоб 18 (фиг,4), шарнирно соединенных со штоком качающегося гидроцилиндра 19. На концах скоб 18 поворотно установлены рычаги 20 с колодками 21.
Верхние концы рычагов 20 соединены шарнирно посредством гидроцилиндра 22. Скобы 18 соединены осями 23 со сферическими концами, контактирующими при повороте скоб 18с планками 24, закрепленными на щеках 25 траверсы 1.
Рабочие поверхности планок 24, контактирующие с осями 23, имеют клиновую поверхность с упором подъема, равным углу подъема винтовой линии резьбового конца трубы 5.
На траверсе 1 закреплены с возможно0 стью поворота в плоскости, перпендикулярной оси трубы 5, аутригеры 26 (фиг.5), выполненные в виде гидроцилиндров, штоки которых шарнирно соединены с опорами 27. Верхние части аутригеров 26 соединены
5 шарнирно с тягой 28, длина которой равна расстоянию между осями 29. Один из аутригеров 26 шарнирно соединен со штоком качающегося гидроцилиндра 30. Устройство снабжено системой наводки резьбы монти0 руемой трубы 5 на заход резьбы ранее уложенной трубы 7.
Система состоит из датчика 31 угла поворота трубы 5 относительно траверсы 1, подвижного упора 32, соединенного со што5 ком гидроцилиндра 33. Упор 32 обеспечивает постоянство начального монтажного зазора между трубами 5 и 7, кратного шагу резьбы и содержит неподвижную торцовую пластину и поворотную пластину, переводи0 мую из вертикального положения в горизонтальное при срабатывании гидроцилиндра 33.
Система управления устройством состоит из выносного пульта управления с ре5 гистрами информации, блоком памяти, блоком индикации, на котором индицируется информация о текущем угловом положении монтируемой трубы, блока сравнения углового положения ранее уложенной и
0 монтируемой труб, скоммутированного с блоком останова привода 8 вращения и осевой подачи трубы 5.
Система управления содержит также датчики углового положения трубы, блок ре5 ле, гидрораспределители и обеспечивает работу устройства в ручном и автоматическом режимах.
Устройство работает следующим образом.
0В исходном положении все захваты открыты, а упор 32 находится в вертикальном положении. Грузоподъемным механизмом за подвеску 2 устройство поднимают, подводят к монтируемой трубе 5 и опускают на
5 нее так, чтобы поворотная пластина подвижного упора 32 упиралась в торец втулочной части трубы. Закрывают захваты 3,4, воздействуя их рычагами на поверхность трубы 5, и фиксируют захваты 3,4 пластиной 13 действием гидроцилиндра 15. При этом
одновремнено осуществляется перевод подвески 2 во второе фиксированное положение, обеспечивающее совпадение по вертикали центра подвески 2 с центром тяжести системы устройство - труба 5. Устрой- ство с зажатой трубой 5 приподнимают и посредством гидроцилиндра 22 подводят рычаги 20, в результате чего колодки 21 прижимаются к трубе 5, при этом шток гидроцилиндра 19 втянут,
В регистр информации системы управления вводят информацию о положении захода резьбы трубы 5. Получаемое от ролика датчика 31, контактирующего с предварительно нанесенной на трубу канавкой 34, положение которой фиксировано относительно захода резьбы. Для этого трубу 5 вращают посредством скобы 18, приводимой гидроцилиндром 19.
Вращение трубы 5 прекращают при со- вмещении захода резьб монтируемой и ранее уложенной труб, а поворотную пластину подвижного упора 32 переводят в горизонтальное положение.
Устройство с трубой 5 опускают в тран- шею и подводят кфанее уложенной трубе 7 до соприкосновения неподвижной торцовой пластины подвижного упора 32 с торцом раструба трубы 7, а вилочных упоров 9 и 10 - до соприкосновения с раструбом и линейной частью трубы 7. Посредством гидроцилиндров аутригеров 26 осуществляют перемещение в вертикальной плоскости устройства с трубой 5, а гидроцилиндром 30 - в горизонтальной плоскости.
Действием гидроцилиндра 17 вводят клиновой фиксатор 16 между рычагами 6 захвата, зажимая таким образом трубу 7. Посредством гидроцилиндров 19, 22 производят свинчиваниетрубы 5 с трубой 7. Окон- чание свинчивания труб определяется по срабатыванию реле давления в гидросистеме, при этом в системе управления фиксируется информация о положении захода резьбы в уложенной трубе. Действием гид- роцилиндров 15, 17 и 22 раскрывают захваты, подвеску 2 перемещают в исходное положение, устройство извлекают из траншеи.
Формула изобретения
1. Устройство для монтажа раструбных труб, содержащее взаимодействующую с крюком крана траверсу с размещенными на ней захватом трубопровода, вилочным упо
ром, захватами трубы и механизмами ее вращения и осевой подачи, о т л и ч а ю- щ е е с я тем, что, с целью повышения надежности и снижения трудоемкости монтажа труб с раструбно-винтовым соединением, оно снабжено подвижной фиксируемой в двух положениях подвеской с приводом и приводными жестко соединенными между собой тягой фиксаторами захватов с приводами системой управления, системой наведения заходов резьб монтируемых труб и механизмом обеспечения соосности монтируемой трубы, при этом механизм осевой подачи выполнен в виде двух скоб, имеющих планки с клиновыми поверхностями, угол наклона которых равен углу подьема резьбы монтируемых труб, а механизм вращения трубы выполнен в виде поворртных самозаклинивающихся на трубе скоб со сферическими элементами на их боковых поверхностях, контактирующими с клиновыми планками механизма осевой подачи.
2.Устройство поп.1.отличающее- с я тем, что привод подвески совмещен с приводом фиксаторов захватов и выполнен в виде гидроцилиндра.
3.Устройство по пп.1 и 2, отличающее с я тем, что захваты выполнены самораскрывающимися.
4.Устройство поп.1,отличающее- с я тем, что механизм обеспечения соосности монтируемых труб выполнен в виде снабженного приводом изменения углового положения шарнирного параллелограмма, стойки которого образованы гидроцилиндрами, связанными между собой в верхней части шарнирно присоединенной к ним тягой, а в средней части - шарнирно с траверсой, при этом штоки гидроцилиндров имеют шарнирно соединенные с ними башмаки для опирания на грунт.
5.Устройство поп.1,отличающее- с я тем, что система наведения заходов резьб монтируемых труб состоит из датчика углового положения стыкуемых труб, блока памяти углового положения пристыкованной ранее трубы, блоков индикации текущего углового положения стыкуемых труб, блока переброса информации из блока индикации в блок памяти, при этом блок переброса информации скоммутирован с системой управления приводом фиксаторов захватов трубопровода.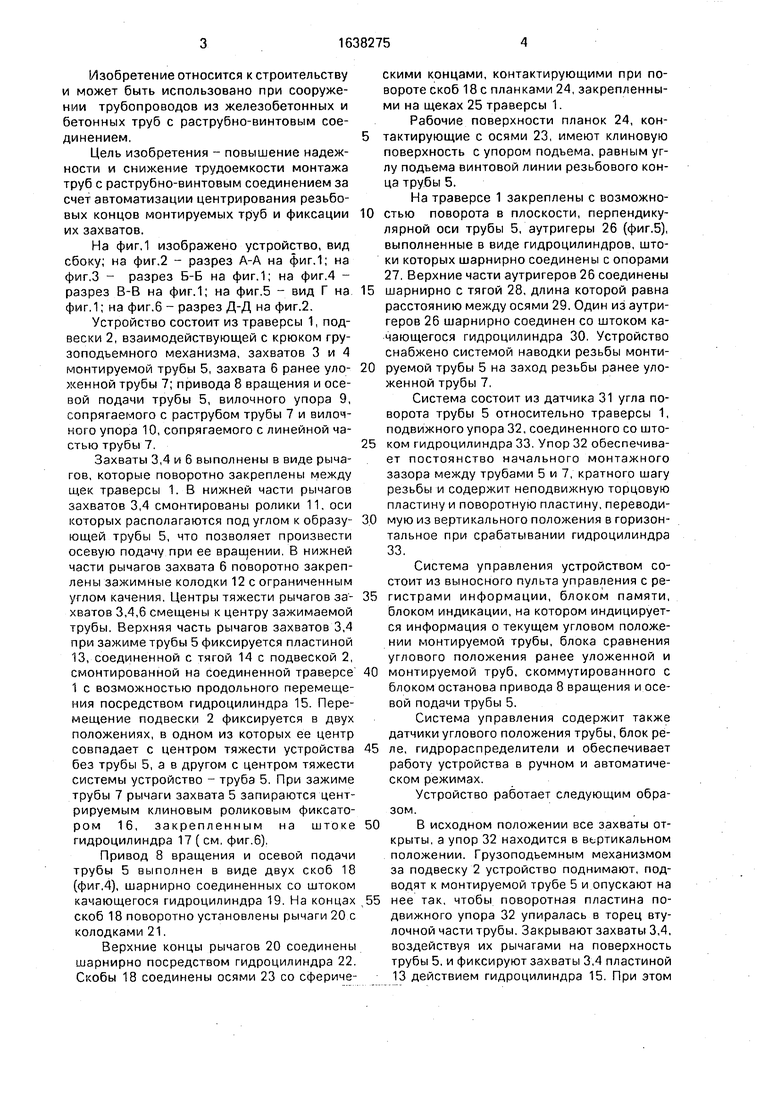
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОНТАЖА И ГИДРОИСПЫТАНИЙ ТРУБОПРОВОДОВ | 1996 |
|
RU2122078C1 |
| Устройство для монтажа раструбных труб | 1983 |
|
SU1153028A1 |
| Мобильное средство для монтажа трубопроводных модулей | 2016 |
|
RU2620185C1 |
| Устройство для укладки и стыковки раструбных труб | 1972 |
|
SU440479A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА И ДЕМОНТАЖА РАСТРУБНЫХ ТРУБ | 1996 |
|
RU2122077C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| Устройство для подвешивания к траверсе опоры линии электропередачи гирлянды изоляторов провода (его варианты) | 1984 |
|
SU1303548A1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| Агрегатированная система для монтажа трубопровода из раструбных труб | 1985 |
|
SU1339339A1 |
Изобретение относится к строительству и может быть использовано при сооружении трубопроводов из железобетонных и бетонных труб с раструбно-винтовым соединением. Цель изобретения - повышение надежности за счет автоматизации центрирования резьбовых концов монтируемых труб и фиксации их захватов Устройство состоит из траверсы, подвески, взаимодействующей с крюком грузоподъемного механизма, захватов монтируемой трубы, захвата ранее уложенной трубы, привода 1 17 И пульту упра8ления f и, вращения и осевой подачи трубы, вилочных упоров, аутригеров, выполненных в виде силовых цилиндров. Устройство снабжено си- , стемой наводки резьбы монтируемой трубы на расход резьбы уложенной трубы. В исходном положении все захваты открыты, а поворотный упор находится в вертикальном положении Устройство опускают на монтируемую трубу до контакта поворотного упора с торцом втулочной части, закрывают захваты, затем фиксируют их действием гидроцилиндра, подвеску 2 перемещают в положение, при котором центр тяжести устройства совпадает по вертикали с крюком грузоподъемного механизма Трубу вращают до совпадения захода резьбы с ранее уложенной трубой и поворотный упор переводят в горизонтальное положение. Устройство опускают в траншею, подводят к ранее уложенной трубе и вилочными упорами ба-; зируют устройство на этой трубе. Посредством гидроцилиндров аутригеров и качающегося гидроцилиндра осуществляют осевое центрирование труб, и действием гидроцилиндров 19, 22 их свинчивание, раскрывают захваты, переводят подвеску в исходное положение и извлекают устройство из.траншеи 4 з.п ф-лы, 6 ил К гидросистеме трубоукладчика (Л с о со 00 ю vj СП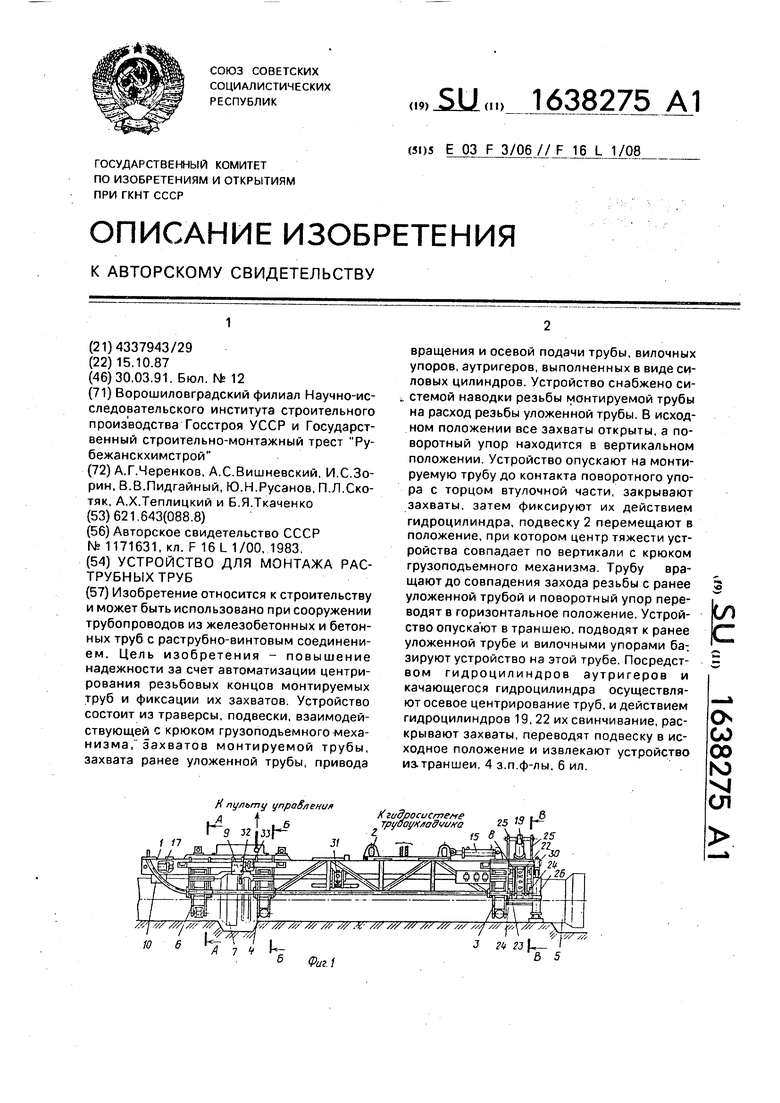
////////У//////// ///№/// /У/ /// ////////////
Фиг.Э
/// ////// /// /// /// /// /// /// /// /// /// /// /// /// /// /// ///
Фиг. Ц
в-в
ВидГ
25
/// /// /7/ /////////////// /////////////// /7/ ////У,
Фа. 5 Ј-Д повернуто
17
| Устройство для монтажа и зачеканки трубопровода из раструбных труб | 1983 |
|
SU1171631A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
