Изобретение относится к области подъемно-транспортного машиностроения, а именно к краноманипуляторным установкам, предназначаемым для выполнения погрузочно-разгрузочных, строительно- монтажных, ремонтных, аварийно-восстановительных и других работ в различных отраслях хозяйства.
Заявляемая краноманипуляторная установка может использоваться как автономно, (при стационарном варианте размещения), так и в составе различного рода транспортных средств.
Известен ряд аналогов изобретения как отечественной, так и зарубежной разработки (см. , например, Автотранспортные средства с грузоподъемными устройствами для пере возки грузов в контейнерах и пакетах, Грифф М.И., Затван Р. А. , Трофименков В. Ф. , М. , Транспорт, 1989, УДК 629.114.4 : 656.135.073.235; Зарубежные и отечественные бортовые манипуляторы и краны для самопогрузки и саморазгрузки автотранспортных средств, Грифф М.И., Затван Р. А. , М. ВНИИНТПИ, 1991, УДК 621.863; "Бортовой манипулятор МКС-4531", инж. А.Д. Шахов и А.К. Маланов, УДК 629.114.4-474.22, ж-л "Строительные и дорожные машины N 10, 1988 г, стр. 11; авт. свид. N 651993 SU, МКИ B 60 P 1/50, 1979 г; пат. США N 4461369, МКИ В 66 F 11/04, 1984 г.; пат. N 2037464, Россия, МКИ B 66 C 23/10, 1995 г. и др.).
Однако многие из них имеют неоптимальную металлоконструкцию, кинематику, схемы укладки стрелового оборудования в транспортном положении и сложны в изготовлении и эксплуатации.
Из числа известных аналогов заявляемого технического решения ближайшим (прототипом) может служить кран-манипулятор МКС-4032 "БАКМ" (см. "Пособие для операторов (машинистов) по безопасной эксплуатации кранов-манипуляторов", М" НПО ОБТ, 1995 г. (ББК 32.816Н, П62, УДК [621.856.8-5:658.382.3]: 658,386.06, авт. составитель Н.А. Шишков).
Указанный кран-манипулятор содержит опорно-поворотное устройство с основанием рамного типа, выносными аутригерами, неподвижно закрепленными на концах выдвижных балок, установленной с радиальной и осевой фиксацией в вертикально ориентированном и расположенном посередине неподвижных балок аутригеров комбинированном подшипниковом узле основания поворотной стойкой, приводимой в действие реечным механизмом с двумя гидроцилиндрами, шарнирно закрепленную на верхнем конце стойки и кинематически связанную с ней посредством гидроцилиндра углового перемещения в вертикальной плоскости многосекционную грузоподъемную стрелу, состоящую из подъемной секции и шарнирно сочлененного и кинематически связанного с ней при помощи гидроцилиндра подъема коробчатого телескопа гексагональной в поперечном сечении конфигурации с телескопическим гидроцилиндром привода его выдвижных секций, и дискретно выдвигаемым из замыкающей секции последнего механическим удлинителем, снабженным концевым присоединителем для крепления сменных рабочих органов, а также гидросистему с масляным баком, гидравлической аппаратурой, включающей в себя секционный золотниковый гидрораспределитель с ручным управлением рычажного типа, и магистралями питания.
В конструкции крана-манипулятора МКС-4032 реализована схема поперечной укладки стрелового оборудования, а сам он имеет достаточно высокое весовое совершенство.
Выбранная в нем схема стационарного закрепления аутригеров на концах выдвижных балок предельно проста в исполнении. Однако она имеет очевидные недостатки, обусловленные низким расположением аутригеров в нерабочем положении. По этой причине несколько ограничивается возможность использования крана-манипулятора на сильно пересеченной местности, при наличии различного рода преград.
При эксплуатации такой техники в условиях бездорожья, особенно в весенне-осенний сезоны аутригеры при движении транспортного средства интенсивно забрасываются грязью.
Симметричное расположение комбинированного подшипникового узла, используемого для монтажа поворотной стойки, посередине неподвижных балок выносных аутригеров не позволяет осуществлять поперечную укладку грузоподъемной стрелы в нерабочем положении по замкнутому плоскому треугольнику, располагаемому в одной плоскости со стойкой, в пределах соответствующего транспортного габарита. Поэтому для компактного размещения ее в нерабочем положении в конструкции этого известного крана-манипулятора телескоп плоско-параллельно смещен в поперечном направлении относительно подъемной секции стрелы и укладывается на основании опорно-поворотного устройства в обход поворотной стойки.
Указанное техническое решение усложняет конструктивное исполнение узла шарнирного сочленения подъемной секции с телескопом, повышает нагруженность ряда элементов его металлоконструкции в процессе эксплуатации и несколько ухудшает внешний вид изделия из-за асимметричного расположения гидроцилиндров углового перемещения подъемной секции и подъема телескопа. К тому же такая компоновка значительно сокращает величину максимально достижимого свободного пространства между неподвижными балками аутригеров и комбинированным подшипниковым узлом, которое может быть использовано для ряда элементов гидросистемы, например масляного бака и др.
Использование в кране-манипуляторе МКС-4032 для поворота стойки реечного механизма с гидравлическими цилиндрами приводит к ограничению угла ее поворота, увеличению линейных размеров соответствующей части опорно-поворотного устройства в поперечном направлении и ухудшению весового совершенства конструкции.
Отсутствие в указанном кране-манипуляторе в узлах крепления телескопического гидроцилиндра привода выдвижных секций телескопа грузоподъемной стрелы компенсационной механической развязки в боковом направлении ухудшает условия работы гидроцилиндра при искривлении продольной оси стрелы под действием эксплуатационных нагрузок. Помимо этого конструктивное исполнение указанного гидроцилиндра телескопическим достаточно сложно в реализации.
Задачей настоящего изобретения является упрощение конструкции заявляемой установки и улучшение ее технико-эксплуатационных характеристик.
В соответствии с изобретением поставленная задача достигается тем, что в заявляемой краноманипуляторной установке оптимизированы конструкция опорно-поворотного устройства, компоновка гидроцилиндров привода выдвижных секций телескопа грузоподъемной стрелы, исполнение узлов крепления их, схема укладки стрелы, прокладка гибких магистралей питания гидросистемы, а также фиксация подвижных частей стрелового оборудования в нерабочем положении и др.
Сущность изобретения поясняется чертежом, где изображены:
на фиг. 1 - общий вид предлагаемой краноманипуляторной установки (грузоподъемная стрела разложена, секции телескопа и механический удлинитель выдвинуты, аутригеры вынесены в крайнее положение, опорные лапы аутригеров выдвинуты книзу);
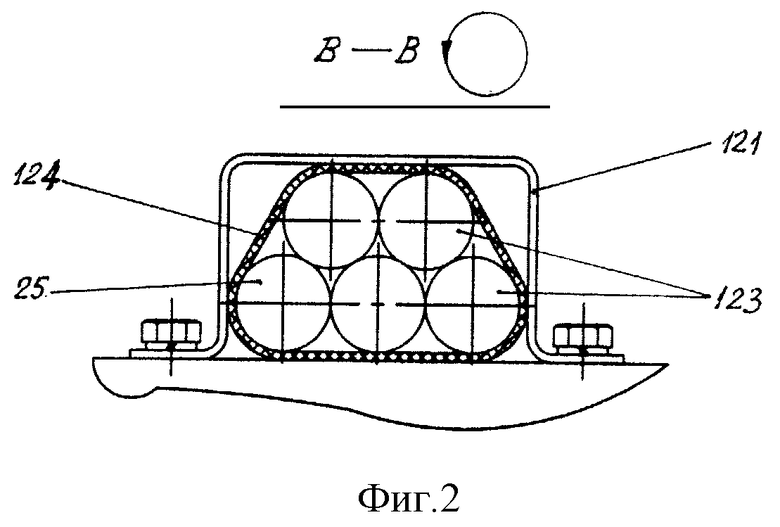
на фиг. 2 - поперечное сечение В-В жгута магистралей питания гидросистемы в зоне за крепления его при помощи прижима на подъемной секции стрелы около узла шарнирного сочленения ее со стойкой опорно-поворотного устройства краноманипуляторной установки;
на фиг. 3 - вид А слева на краноманипуляторную установку (Грузоподъемная стрела разложена, выносные аутригеры повернуты опорными лапами книзу);
на фиг. 4 - вид Г спереди на телескоп с механическим удлинителем стрелы и подвеску с грузозахватным крюком;
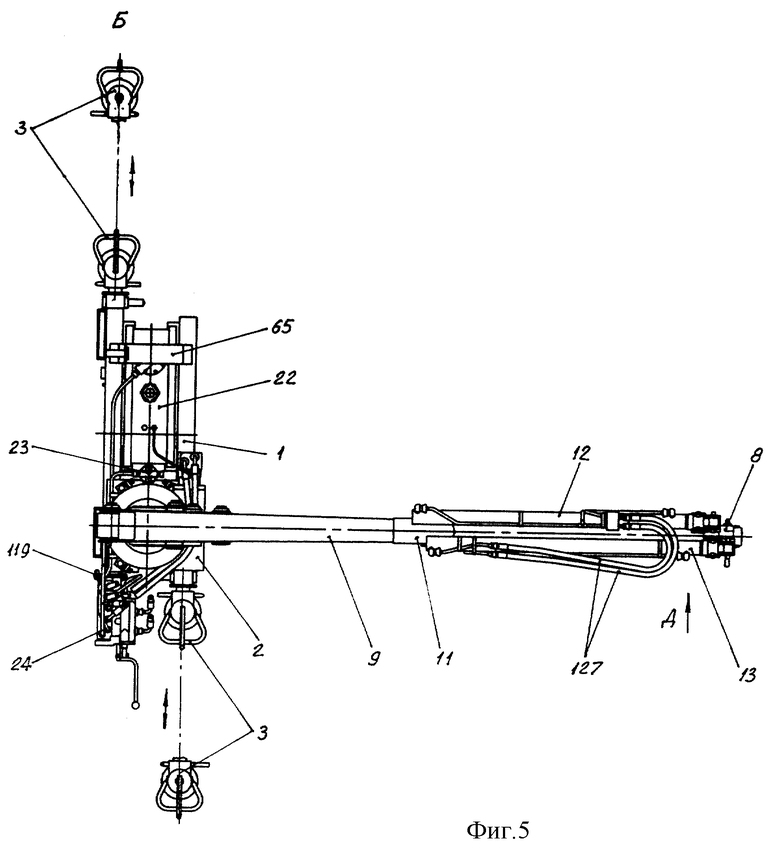
на фиг. 5 - вид Б сверху на краноманипуляторную установку (грузоподъемная стрела разложена, выдвижные секции телескопа и механический удлинитель втянуты; показаны крайние положения выдвижных балок аутригеров при вынесении их в рабочую позицию);
на фиг. 6 - вид Д прямо на телескоп грузоподъемной стрелы (выдвижные секции телескопа и механический удлинитель втянуты);
на фиг. 7 - выносной элемент Е, поясняющий особенности крепления гидроцилиндров привода выдвижных секций телескопа грузоподъемной стрелы на его металлоконструкции;
на фиг. 8 - поперечное сечение Ж-Ж узла крепления штока гидроцилиндра привода первой выдвижной секции телескопа на ее металлоконструкции;
на фиг. 9 - выносной элемент И, поясняющий способ закрепления магистралей питания гидросистемы, подстыковываемых к сменному рабочему органу грейферного типа, на его металлоконструкции при помощи навесного держателя;
на фиг. 10 - общий вид заявляемой краноманипуляторной установки со сменным рабочим органом грейферного типа (грузоподъемная стрела разложена, секции телескопа и механический удлинитель выдвинуты, выносные аутригеры повернуты опорными лапами книзу);
на фиг. 11 - поперечный разрез К-К краноманипуляторной установки вблизи верхней кромки механизма поворота стойки с видом на основание опорно-поворотного устройства (выдвижные балки выносных аутригеров втянуты во внутренние полости неподвижных балок);
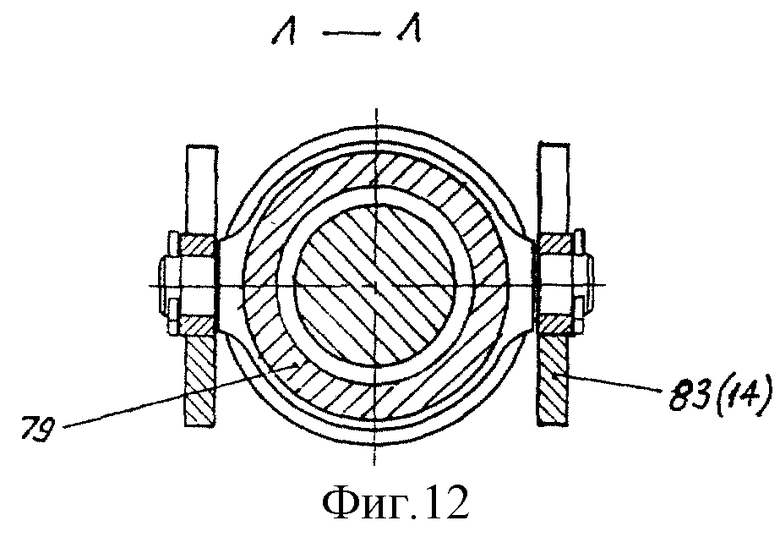
на фиг. 12 - поперечное сечение Л-Л узлов крепления гидроцилиндров привода выдвижных секций телескопа на их металлоконструкции;
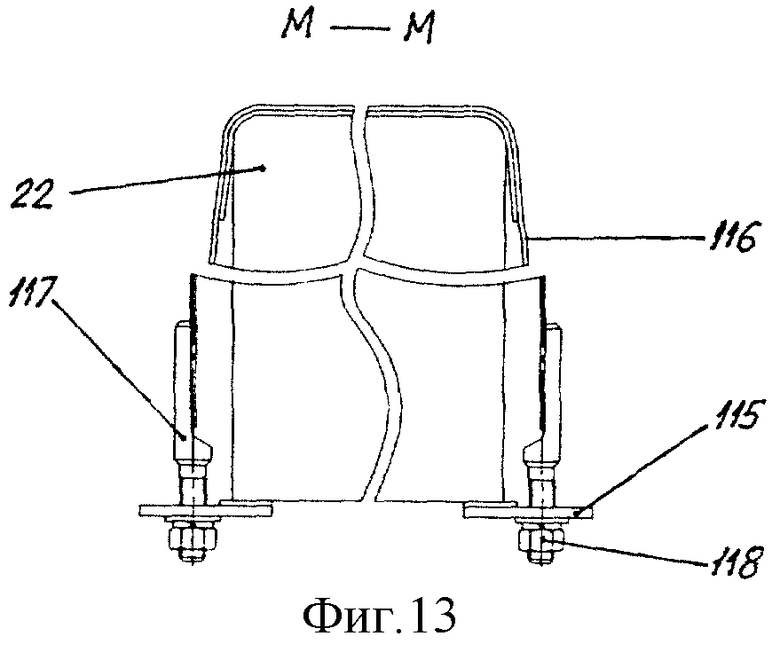
на фиг. 13 - продольное сечение М-М масляного бака гидросистемы в зоне его крепления на основании опорно-поворотного устройства;
на фиг. 14 - общий вид телескопа с механическим удлинителем грузоподъемной стрелы и рабочим органом грейферного типа, поясняющий особенности трансформирования подвижных участков магистралей питания гидросистемы, подстыковываемых к сменному рабочему органу грейферного типа, при втягивании выдвижных секций телескопа;
на фиг. 15 - общий вид (сзади) краноманипуляторной установки в нерабочем (транспортном) положении (в правом нижнем углу изображения показаны ряд промежуточных положений выносных аутригеров);
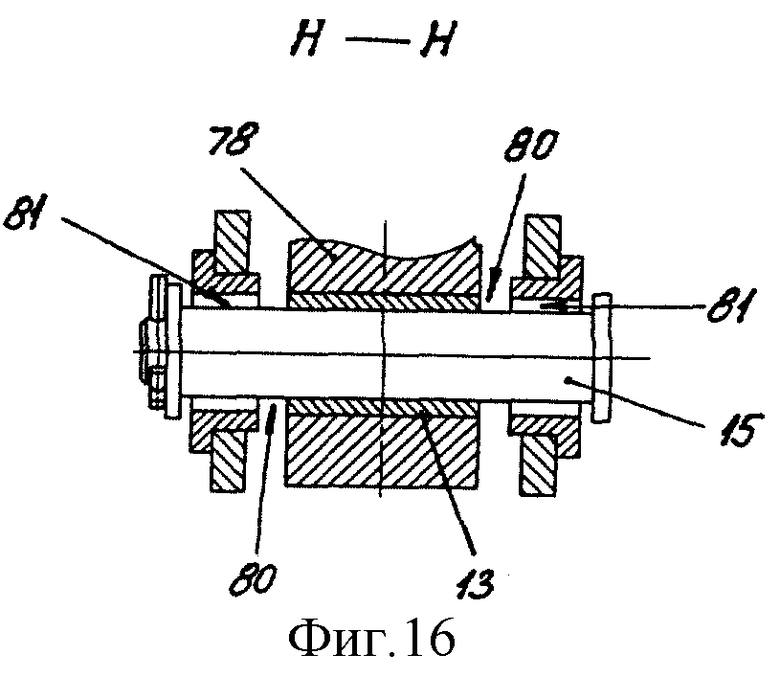
на фиг. 16 - поперечное сечение Н-Н узла крепления штока гидроцилиндра привода второй выдвижной секции телескопа на ее металлоконструкции;
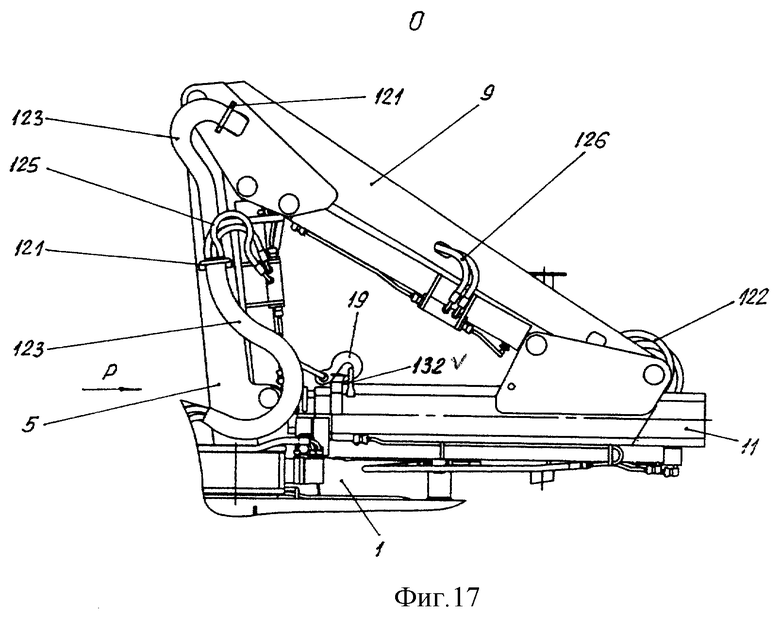
на фиг. 17 - вид О справа на краноманипуляторную установку в нерабочем положении;
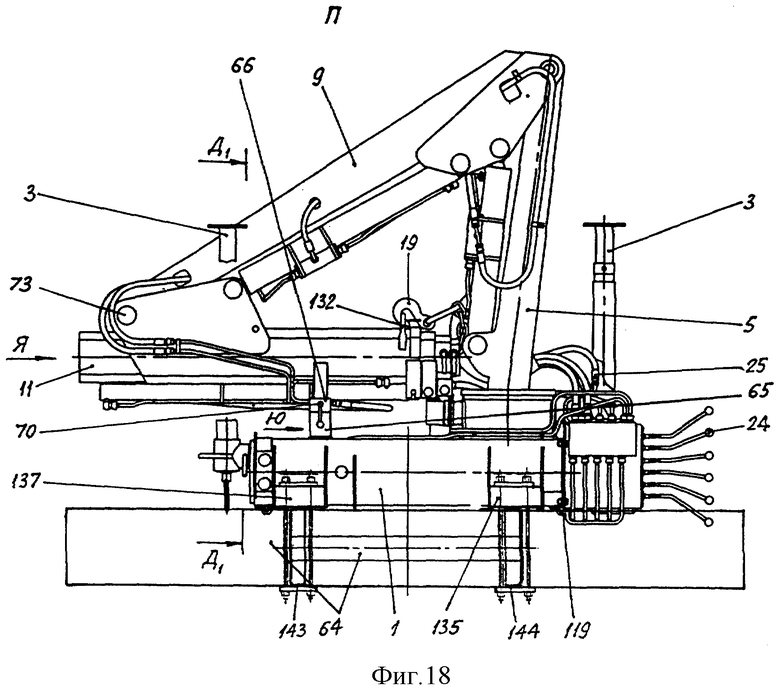
на фиг. 18 - вид П слева на краноманипуляторную установку в нерабочем положении;
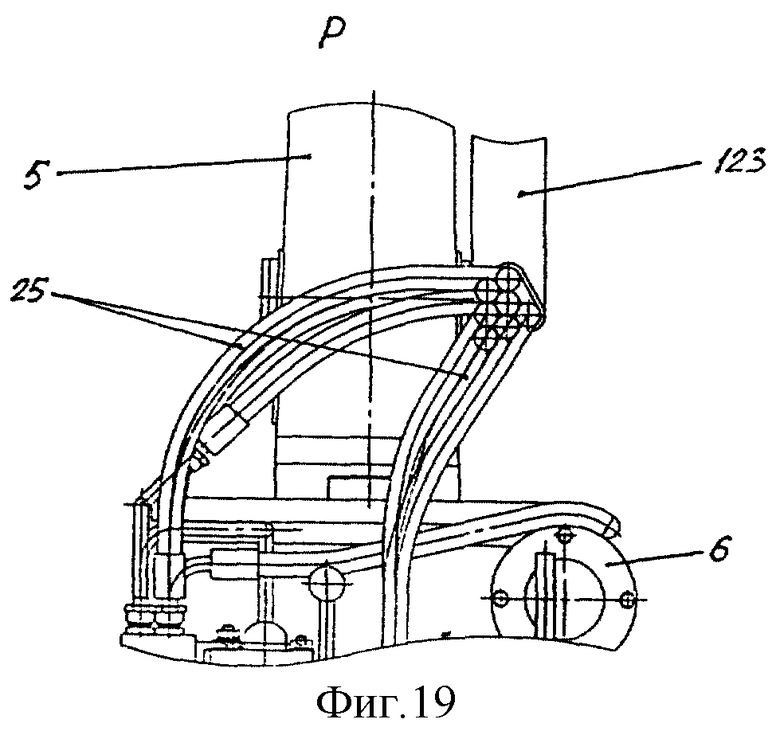
на фиг. 19 - вид Р сзади на стойку опорно-поворотного устройства в зоне расположения нижней части жгута магистралей питания гидросистемы;
на фиг. 20 - поперечное сечение С-С жгута магистралей питания гидросистемы в зоне закрепления его на стойке опорно-поворотного устройства при помощи прижима;.
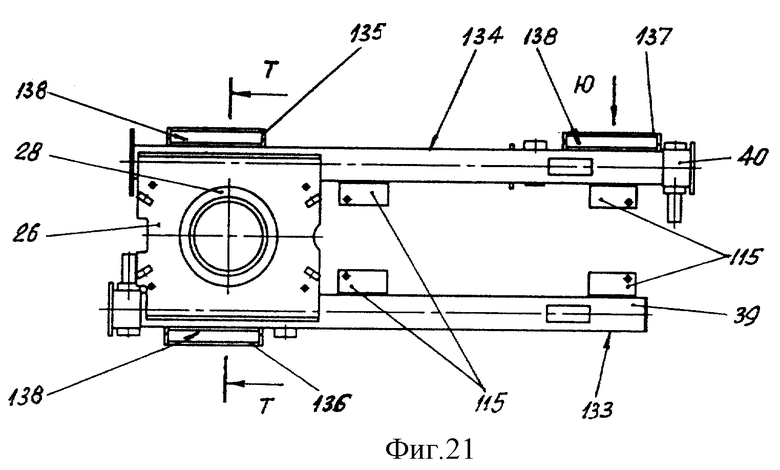
на фиг. 21 - общий вид (сверху) основания опорно-поворотного устройства;
на фиг. 22 - поперечное сечение (вертикальный разрез) Т-Т основания опорно-поворотного устройства в зоне расположения комбинированного подшипникового узла;
на фиг. 23 - горизонтальный разрез У-У основания опорно-поворотного устройства;
на фиг. 24 - вертикальный разрез Ф-Ф основания опорно- поворотного устройства краноманипуляторной установки в зоне закрепления поворотной стойки в комбинированном подшипниковом узле;
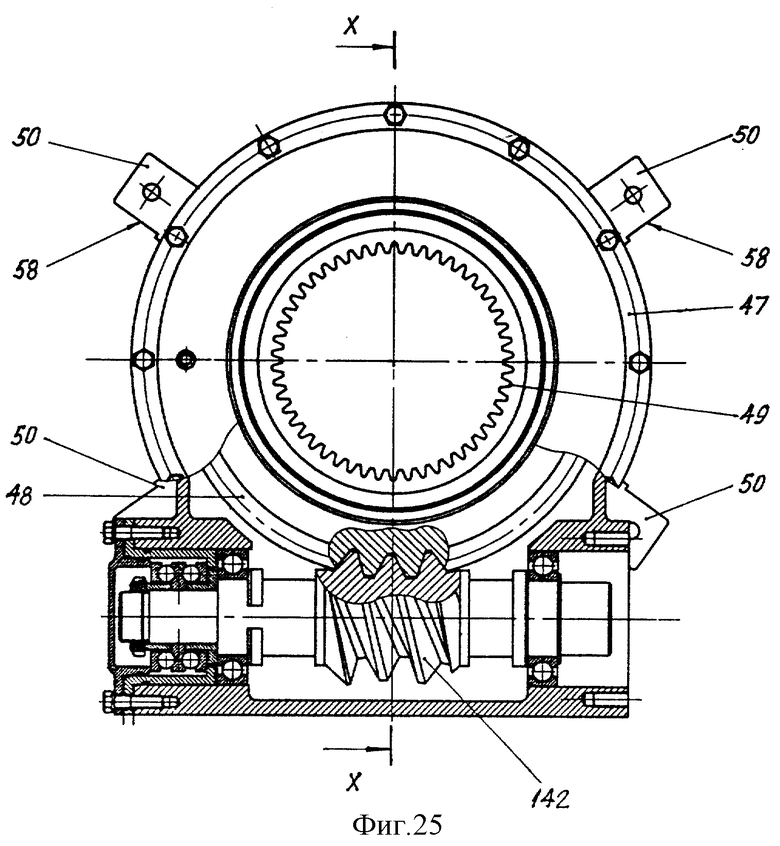
на фиг. 25 - общий вид червячного редуктора с глобоидным зацеплением, используемого в качестве механизма поворота стойки опорно-поворотного устройства краноманипуляторной установки;
на фиг. 26 - вертикальный разрез Х-Х червячного редуктора;
на фиг. 27 - выносной элемент Ц, поясняющий особенности конструктивного сопряжения гидромотора привода червячного редуктора с глобоидным червяком последнего;
на фиг. 28 - выносной элемент Ч с изображением одного из узлов крепления червячного редуктора на верхней силовой плите основания опорно-поворотного устройства;
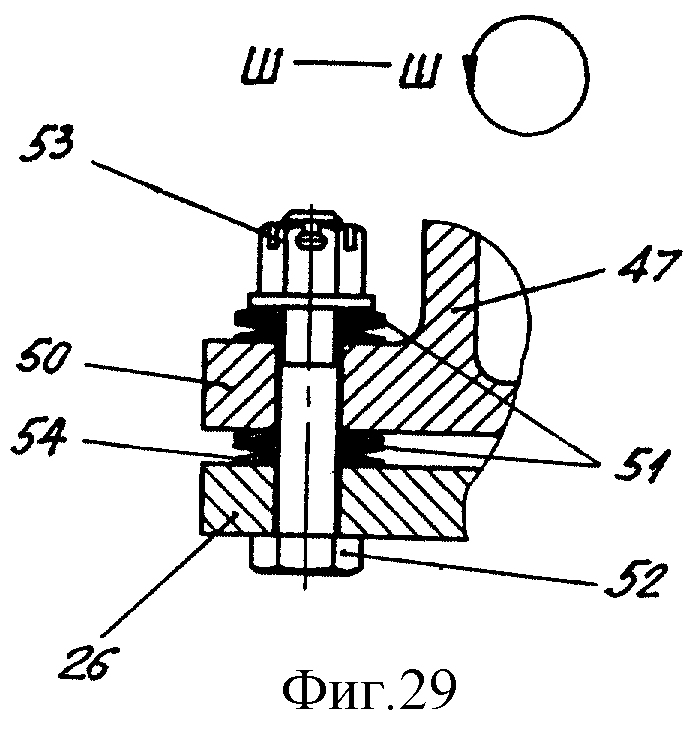
на фиг. 29 - вертикальный разрез Ш-Ш по месту расположения одного из узлов червячного редуктора на верхней силовой плите основания опорно-поворотного устройства;
на фиг. 30 - вид Щ сверху на защитный козырек, экранирующий верхнюю часть навесного червячного редуктора от попадания на нее атмосферных осадков и различного рода механических частиц;
на фиг. 31 - общий вид одного из полудисков защитного козырька;
на фиг. 32 - вертикальный разрез Э-Э полудиска защитного козырька;
на фиг. 33 - вид Ю сбоку на механизм позиционирования телескопа грузоподъемной стрелы при укладке его на ложемент опорной площадки основания опорно-поворотного устройства;
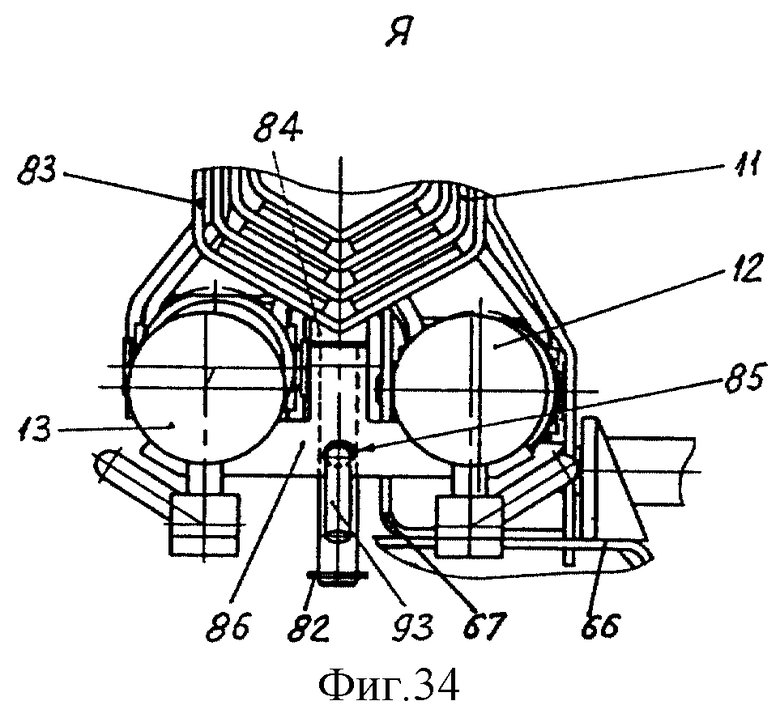
на фиг. 34 - вид Я на телескоп грузоподъемной стрелы в нерабочем положении с его тыльной части (гидроцилиндры привода выдвижных секций телескопа зафиксированы быстродействующим прижимом Т - образной конфигурации);
на фиг. 35 - вид A1 на телескоп грузоподъемной стрелы в рабочем положении с его тыльной части (гидроцилиндры привода выдвижных секций телескопа расфиксированы, быстродействующий прижим Т - образной конфигурации находится в рабочей позиции);
на фиг. 36 - общий вид прижима Т - образной конфигурации механизма фиксации гидроцилиндров привода выдвижных секций телескопа грузоподъемной стрелы в нерабочем положении;
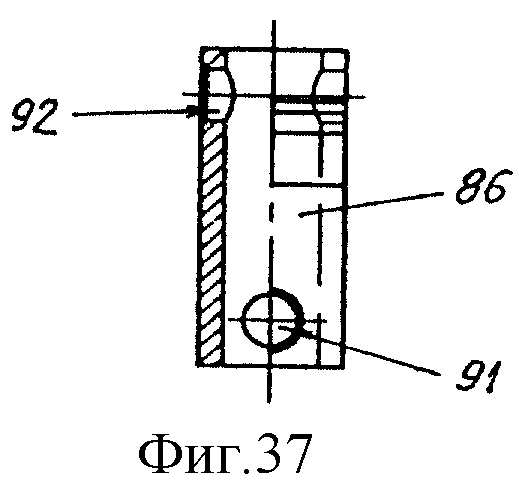
на фиг. 37 - вид сбоку на прижим Т - образной конфигурации механизма фиксации гидроцилиндров привода выдвижных секций телескопа грузоподъемной стрелы;
на фиг. 38 - общий вид одного из выносных аутригеров опорно-поворотного устройства заявляемой краноманипуляторной установки;
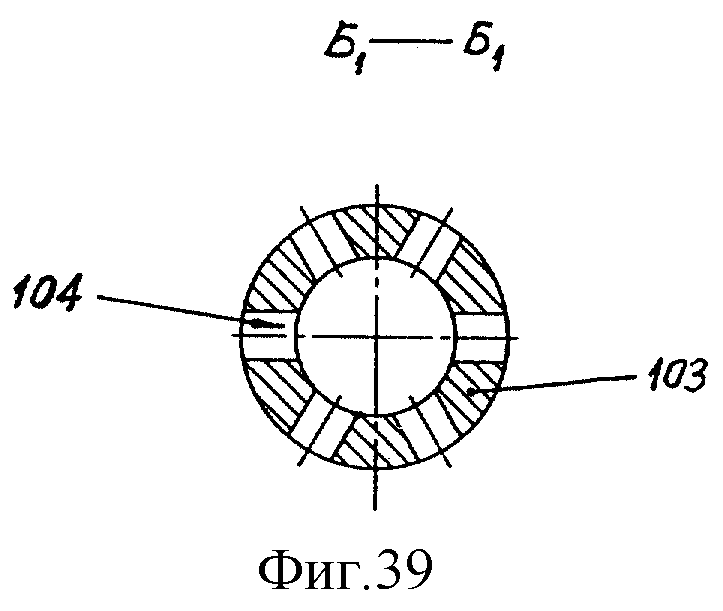
на фиг. 39 - поперечное сечение Б1-Б1 присоединительной втулки узла шарнирной подвески аутригера на выдвижной балке по месту фиксации его шкворнем;
на фиг. 40 - поперечное сечение B1-B1 присоединительной втулки узла шарнирной подвески аутригера на выдвижной балке по месту расположения механизма продольной фиксации сопрягаемых деталей указанного шарнира;
на фиг. 41 - вид сбоку на узел фиксации между собой опорной лапы и промежуточной трубы нижней секции аутригера при помощи шкворня;
на фиг. 42 - общий вид выдвижной балки выносных аутригеров;
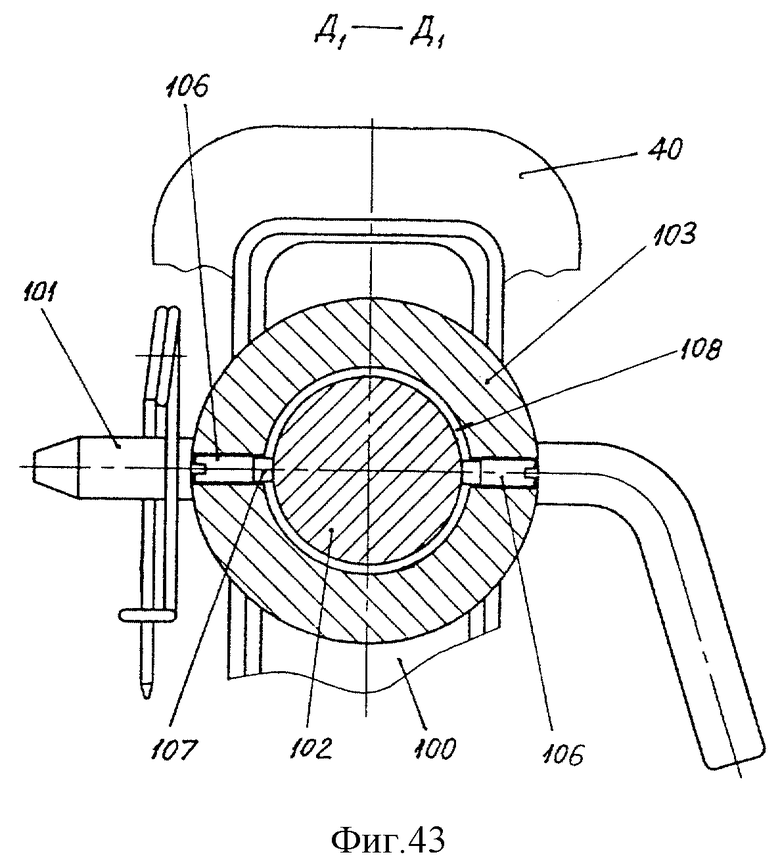
на фиг. 43 - поперечное cечение Д1-Д1 выносного аутригера в зоне расположения механизма продольной фиксации сопрягаемых между собой деталей узла шарнирной подвески его на выдвижной балке;
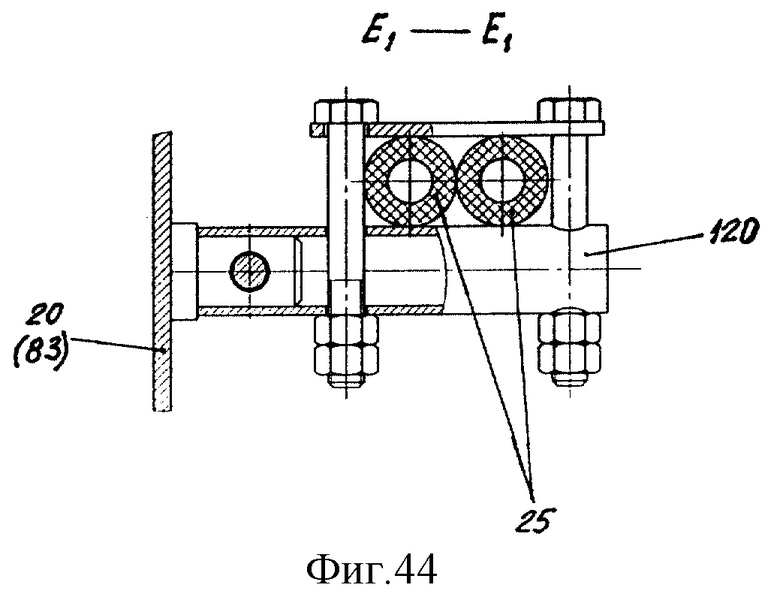
на фиг. 44 - поперечное сечение E1-E1 узлов крепления магистралей питания гидросистемы при помощи навесного держателя;
на фиг. 45 - выносной элемент Ж1 с изображением узла крепления магистралей питания гидросистемы при помощи навесного держателя;
на фиг. 46 - выносной элемент И1 с изображением узла крепления магистралей питания гидросистемы при помощи навесного держателя;
на фиг. 47 - поперечное сечение K1-K1 узла крепления магистралей питания гидросистемы, изображенного на фиг. 46;
на фиг. 48 - выносной элемент Л1 с изображением узлов подстыковки магистралей питания к гидрофицированным сменным рабочим органам, например грейферу, и крепления их на металлоконструкции при помощи навесного держателя;
на фиг. 49 - поперечное сечение M1-M1 навесного держателя узла крепления магистралей питания гидросистемы, изображенного на фиг. 48;
на фиг. 50 - общий вид быстродействующего отжимного клапана с шариковым замковым механизмом, используемого в составе гидрофицированного сменного рабочего органа, например грейфера;
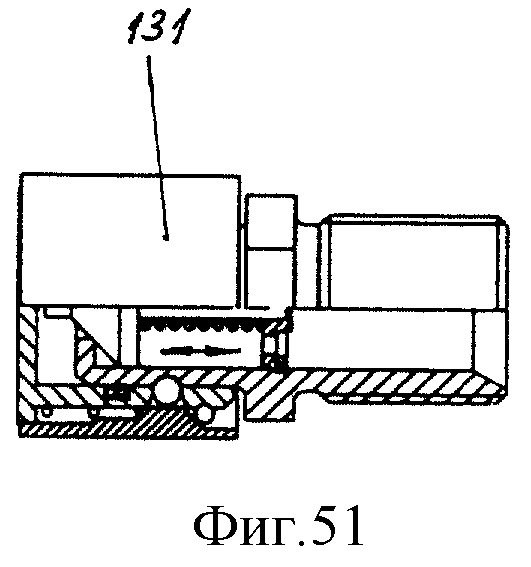
на фиг. 51 - общий вид быстродействующего отжимного клапана, входящего в состав магистралей питания гидросистемы, подстыковываемых к гидрофицированным сменным рабочим органам.
Предлагаемая краноманипуляторная установка содержит опорно-поворотное устройство 1 с основанием 2 рамного типа, выносными аутригерами 3, установленной с радиальной и осевой фиксацией в вертикально ориентированном комбинированном подшипниковом узле 4 основания поворотной стойкой 5, приводимой в действие механизмом 6, имеющим зубчатую передачу с гидравлическим двигателем, шарнирно закрепленную на верхнем конце стойки и кинематически связанную с ней посредством гидроцилиндра 7 углового перемещения в вертикальной плоскости многосекционную грузоподъемную стрелу 8, состоящую из расположенных в одной плоскости со стойкой подъемной секции 9 и шарнирно сочлененного и кинематически связанного с ней при помощи гидроцилиндра подъема 10 коробчатого телескопа 11 гексагональной в поперечном сечении конфигурации с автономными гидроцилиндрами 12,13 привода его выдвижных секций 14, 15, и дискретно выдвигаемым из замыкающей секции 15 последнего механическим удлинителем 16, снабженным концевым присоединителем 17 для крепления сменных рабочих органов, например, подвески 18 с грузозахватным крюком 19 или грейфера 20, а также гидросистему 21 с масляным баком 22, гидравлической аппаратурой 23, включающей в себя секционный золотниковый гидрораспределитель 24 с ручным управлением рычажного типа, и магистралями питания 25.
Основание 2 опорно-поворотного устройства 1 в заявляемой краноманипуляторной установке содержит полый корпус с двумя разнесенными по высоте и горизонтально ориентированными плитами 26, 27.
Силовые плиты 26, 27 основания жестко связаны между собой при помощи приварного короба 28 с двойной стенкой 29.
Короб 28 образован центрально расположенной трубой 30 и внешней оболочкой 31, охватывающей трубу с зазором 32 по ее наружному обводу.
Труба 30 снабжена приварными концевыми присоединителями 33, 34 под верхний радиальный и блок нижних радиально-упорных подшипников 35 и 36, 37 и торцевую опору 38 комбинированного подшипникового узла 4.
Помимо короба 28 плиты 26, 27 дополнительно замкнуты друг на друга расположенными между ними с диаметрально противоположных сторон трубы 30 неподвижными приварными балками 39, 40 выносных аутригеров. При этом комбинированный подшипниковый узел 4 с плитами 26, 27 смещен в поперечном направлении к одним из концов балок 39, 40.
Рассмотренные особенности конструктивного исполнения опорно-поворотного устройства заявляемой краноманипуляторной установки позволяют существенно улучшить его весовое совершенство при сохранении необходимой несущей способности.
Расчеты показывают, что в силовом плане вклад трубы 30 в несущую способность металлоконструкции основания опорно-поворотного устройства сравнительно невелик (до 5% по деформативности и 20% по прочности).
Указанное обстоятельство свидетельствует о том, что эта деталь является своего рода связующим конструктивным звеном между плитами 26, 27 и потому может быть выполнена тонкостенной.
Наличие же в конструкции основания, отнесенной от трубы 30 тонкостенной оболочки 31, позволяет существенно увеличить до (75%) жесткость его при минимально возможном весе.
Радиальная фиксация поворотной стойки 5 в узле 4 основания осуществляется при помощи подшипников 35 и 36, 37, а осевая - посредством торцевой опоры 38.
Торцевая опора 38 выполнена в виде размещенного в кольцевой проточке 41 корпуса основания 2 плоского разрезного пружинного кольца, контактирующего с торцом неподвижного кольца 42 нижнего радиально-упорного подшипника 37, закрепленного на хвостовике поворотной стойки 5 при помощи кольца 43 аналогичной конструкции, взаимодействующего с торцом подвижного кольца 44 того же подшипника.
Подшипники 35, 36, 37, а также торцевая опора 38 обеспечивают необходимую свободу и легкость вращения стойки 5 при работе механизма 6 ее поворота. При этом вследствие своей неподвижности торцевая опора 38 практически не подвергается износу и не имеет предрасположенности к механическим задирам рабочей поверхности под действием эксплуатационных нагрузок.
Механизм 6 поворота стойки 5 опорно-поворотного устройства заявляемой краноманипуляторной установки выполнен в виде установленного на верхней силовой плите 26 через подкладное самоцентрирующееся сферическое кольцо 45 и приводимого в действие гидромотором 46 навесного червячного редуктора 47 с глобоидным зацеплением. При этом рабочее колесо 48 редуктора посредством шлицевого соединения 49 кинематически сочленено с нижней частью стойки 5.
Такое сочленение редуктора с поворотной стойкой обеспечивает возможность регулировки положения его по высоте в пределах протяженности шлицевого соединения.
Червячный редуктор закреплен своими опорными лапами 50 на верхней силовой плите 26 основания опорно-поворотного устройства при помощи осевых амортизирующих подвесок 51 изменяемой жесткости.
Подвески 51 выполнены в виде стянутых болтами 52 с натяжными гайками 53 пакетов тарельчатых пружин 54.
Возможность неорганизованного перемещения корпуса редуктора в окружном направлении ограничена посредством приваренных на силовой плите 26 основания 2 с соответствующей ориентацией по месту расположения лап 50 редуктора механических упоров 55.
В горизонтальные резьбовые отверстия упоров 55 ввернуты регулировочные болты 56, взаимодействующие через опорно-поджимные проставки 57 с боковыми стенками 58 лап 50 редуктора.
Механизм поворота стойки в виде червячного редуктора с глобоидным зубчатым зацеплением отличается компактностью и достаточно высоким весовым совершенством. Он обеспечивает неограниченный угол поворота стойки. Работа указанного механизма характеризуется большой равномерностью хода и малой погрешностью позиционирования перемещаемого в окружном направлении груза.
Стойка 5 опорно-поворотного устройства заявляемой краноманипуляторной установки снабжена жестко закрепленным на ней внешним тонкостенным защитным козырьком 59, экранирующим верхнюю часть червячного редуктора 47.
Конструктивно козырек 59 выполнен из двух, соединенных между собой при монтаже посредством сварки полудисков 60, 61 с ориентированными книзу отбортовками 62 и центральными сквозными выемками 63, спрофилированными по контуру сопрягаемой с ними части стойки 5.
Указанное техническое решение достаточно просто в реализации и исключает прямое попадание атмосферных осадков, а также мелкодисперсных и других механических частиц от перемещаемого груза на верхнюю часть червячного редуктора и накапливание на ней конденсата и грязи.
Длины подъемной секции 9, поворотной стойки 5 и секций телескопа 11 грузоподъемной стрелы 8 заявляемой краноманипуляторной установки в образованном ими шарнирно-рычажном плоском механизме выполнены с возможностью формирования в нерабочем положении замкнутого плоского треугольника в пределах максимального поперечного габарита шасси 64 транспортного средства, используемого для монтажа установки.
Формирование указанного треугольника выполнено путем наклона книзу подъемной секции 9 и горизонтальной укладки втянутого телескопа 11 на опорную площадку 65 основания 2 концевым присоединителем 17 рабочего органа вплотную к нижней части поворотной стойки 5.
Рассмотренное техническое решение позволяет предельно упростить конфигурацию вышеупомянутого шарнирно-рычажного механизма, за счет исключения необходимости плоскопараллельного смещения телескопа относительно подъемной секции стрелы в поперечном направлении, и вписаться в пределы максимального поперечного габарита используемого для монтажа установки шасси транспортного средства.
Опорная площадка 65 для укладки телескопа 11 грузоподъемной стрелы 8 в нерабочем положении выполнена в виде жестко закрепленной на неподвижных балках 39, 40 выносных аутригеров в зоне, противоположной размещению комбинированного подшипникового узла 4, съемной поперечины скобообразного профиля с приподнятым над верхним срезом балок ложементом 66.
Заявляемая краноманипуляторная установка снабжена механизмом позиционирования телескопа 11 грузоподъемной стрелы 8 при укладке его на ложемент 66 опорной площадки 65 основания 2.
Указанный механизм выполнен в виде сформированного в соответствующем месте на металлоконструкции телескопа 11 опорно- установочного элемента 67 с концевым зацепом 68, вводимым при укладке стрелы в нерабочее положение в спрофилированный по нему сквозной паз 69 в ложементе 66, и установленного на площадке 65 быстродействующего двухпозиционного фиксатора 70 ригельного типа.
Подпружиненный ригель 71 фиксатора 70 взаимодействует с располагаемым в этой позиции напротив него соответствующим запорным отверстием 72 в опорно-установочном элементе 67 телескопа 11.
В заявляемой краноманипуляторной установке трехзвенник, образованный точками 73, 74, 75 шарнирного сочленения подъемной секции 9 грузоподъемной стрелы 8 с телескопом 11 и закрепления корпуса 76 гидроцилиндра 10 подъема последнего и его штока 77 в крайнем выдвинутом положении, выполнен с соотношением длин указанных звеньев, обеспечивающим максимальный угол относительного поворота подъемной секции и телескопа, близкий к 180o.
Указанная особенность конструктивного исполнения установки помимо обеспечения максимально возможного значения вылета стрелы 8 и высоты подъема грузозахватного крюка 19 позволяет значительно повысить эффективность работы ее в районе около предельных углов возвышения стрелы над горизонтом, где рекомендуется работать в основном только посредством углового перемещения подъемной секции 9 последней.
Автономные гидроцилиндры 12, 13 привода выдвижных секций 14, 15 телескопа 11 грузоподъемной стрелы 8 параллельно размещены на верхних наклонных гранях металлоконструкции его секций с шарнирным закреплением их штоков 78 и корпусов 79. При этом в местах закрепления штоков 78 выполнены соответствующие осевые и радиальные зазоры 80, 81, обеспечивающие необходимую свободу перемещения указанных секций телескопа, относительно гидроцилиндров их привода в боковом и вертикальном направлениях в пределах фактических величин искривления продольной оси стрелы под действием эксплуатационных нагрузок.
Использование для привода каждой из выдвижных секций телескопа автономных гидроцилиндров и вышерассмотренной схемы размещения их на верхних наклонных гранях металлоконструкции секций позволяет существенно упростить конструкцию гидроцилиндров и обеспечить компактную укладку их с минимизацией габаритов стрелового оборудования в вертикальном направлении. Наличие же вышеупомянутых зазоров позволяет исключить силовое нагружение гидроцилиндров привода поперечными силами при искривлении продольной оси грузоподъемной стрелы, реализуемом в процессе эксплуатации установки.
Указанное обстоятельство способствует существенному улучшению условий работы гидроцилиндров привода в целом и в особенности - деталей их подвижных соединений.
В заявляемой краноманипуляторной установке телескоп 11 грузоподъемной стрелы 8 снабжен механизмом 82 фиксации гидроцилиндров 12, 13 привода его выдвижных секций 14, 15 в нерабочем положении.
Механизм 82 выполнен в виде приваренного на тыльной части неподвижной секции 83 телескопа 11 сверху по центру ее поперечного сечения вертикально ориентированного цилиндрического пальца 84 с поперечным сквозным отверстием 85 и надетого на него плоского поворотного механического прижима 86 Т - образной конфигурации.
Рабочие поверхности 87, 88 боковых полок 89 прижима 86 спрофилированы по наружному поперечному контуру корпусов 79 гидроцилиндров 12, 13 привода выдвижных секций 14, 15 телескопа 11, а вертикальная стойка 90 снабжена двумя разнесенными по ее высоте и расположенными во взаимно перпендикулярных плоскостях, сквозными поперечными отверстиями 91, 92 одинакового с отверстием 85 в пальце 84 диаметра под шкворень 93. При этом в нерабочем положении прижим 86 ориентирован поперек стрелы 8 и опущен вниз с обеспечением поджатия гидроцилиндров 12, 13 и фиксации шкворнем 93, вводимым в соответствующие отверстия 85, 92 пальца 84 и прижима 86.
В рабочем положении прижим 86 выведен из зацепления с гидроцилиндрами 12, 13 посредством соответствующего подъема его вдоль пальца 84 и поворота на 90o вокруг него с обеспечением фиксации тем же самым шкворнем 93, вводимым в отверстия 85, 91 пальца и прижима.
Указанное техническое решение просто в конструктивном исполнении и обеспечивает возможность достаточно быстрой и надежной фиксации расфиксации гидроцилиндров привода выдвижных секций телескопа грузоподъемной стрелы при переводе ее из транспортного (нерабочего) положения в рабочее и наоборот. Используемый для этих целей прижим компактен и не мешает работе перемещающихся в пространстве частей телескопа и укладке его на ложемент 66 опорной площадки 65 основания 2 при переводе стрелового оборудования в нерабочее положение.
Каждый из выносных аутригеров 3 опорно-поворотного устройства заявляемой краноманипуляторной установки содержит две секции, нижняя из которых выполнена телескопической в виде промежуточной трубы 94 и дискретно выдвигаемой из нее опорной лапы 95, фиксируемой в каждом из промежуточных и конечных положениях при помощи скрепляющего их в одно целое съемного шкворня 96, а верхняя выполнена в виде телескопически сочлененного с промежуточной трубой 94 корпуса 97. При этом корпус снабжен винтовым механизмом 98 с ручным приводом 99, например, рычажного типа, обеспечивающим бесступенчатое поступательное перемещение промежуточной трубы 94 с лапой 95.
Каждый из аутригеров 3 заявляемой установки соединен с соответствующей им выдвижной балкой 100 посредством шарнирной подвески с возможностью дискретного поворота в вертикальной плоскости, ориентированной в продольном направлении, в пределах 360 градусов и фиксации в каждом из промежуточных положений при помощи съемного шкворня 101.
При этом на соответствующем торце выдвижной балки выполнен ориентированный вдоль нее цилиндрический присоединитель 102, подвижно сочлененный с ответной втулкой 103, перпендикулярно закрепленной, например, посредством сварки на верхней части корпуса 97 аутригера, а в теле втулки 103 выполнены равнорасположенные в окружном направлении радиальные отверстия 104, совмещаемые с соответствующим отверстием 105 такого же диаметра в присоединителе 102, для установки в них съемного шкворня 101 фиксации аутригеров относительно выдвижной балки.
Каждый из узлов шарнирной подвески аутригеров снабжен механизмом продольной фиксации сопряженных деталей шарнира, выполненным в виде ввернутых в тело втулки 103 корпуса аутригера резьбовых ограничителей 106, цилиндрические хвостовики 107 которых кинематически взаимодействуют с расположенной с ними в одной плоскости кольцевой проточкой 108 на наружней поверхности присоединителя 102 выдвижной балки 100.
Аутригеры 3 снабжены механизмами фиксации телескопически соединенных между собой опорной лапы 95 и промежуточной трубы 94, а также указанной трубы и корпуса 97 от взаимного проворота в окружном направлении, выполненными в виде ограничительных винтов 109, 110, радиально ввернутых в резьбовые отверстия стенки трубы и корпуса и кинематически взаимодействующих с вертикально ориентированными направляющими шпоночными пазами 111, 112, сформированными в стенках соответствующих ответных деталей указанных телескопических пар.
Вследствие рассмотренных особенностей конструктивного исполнения узлов шарнирной подвески аутригеров опорно-поворотного устройства заявляемой краноманипуляторной установки они могут располагаться в нерабочем положении опорной лапой вверх. В этой позиции аутригеры находятся в безопасной и наиболее благоприятной по условиям эксплуатации зоне, высоко над землей, и при движении транспортного средства практически не забрасываются дорожной грязью. В принципе в нерабочем положении они могут располагаться и под другими углами к горизонту как выше, так и ниже плоскости монтажа заявляемой краноманипуляторной установки на опорной раме шасси используемого транспортного средства.
Такая особенность конструктивного исполнения аутригеров существенно расширяет номенклатуру транспортных средств, которые могут быть использованы для размещения заявляемой краноманипуляторной установки либо сводит к минимуму необходимость доработки их шасси.
Они несложны в изготовлении, компактны, имеют небольшую массу, удобны и безопасны в эксплуатации. Для перевода таких аутригеров из транспортного положения в рабочее и наоборот не требуется автономный гидропривод, поскольку все связанные с этим операции выполняются вручную с обеспечением соответствующих требований нормативных документов.
Масляный бак 22 гидросистемы 21 заявляемой краноманипуляторной установки выполнен в виде удлиненного резервуара призматической формы, размещенного в свободном пространстве, ограниченном внешними обводами комбинированного подшипникового узла 4 и внутренними боковыми стенками неподвижных балок 39, 40 выносных аутригеров заподлицо с верхними и нижними поверхностями 113, 114 указанных балок на приваренных к ним опорно-установочных кронштейнах 115, снабженных соответствующими присоединительными элементами, и неподвижно закреплен на них при помощи гибких бандажей 116 ленточного типа, оканчивающихся резьбовыми хвостовиками 117 с натяжными гайками 118.
Встроенный в указанное пространство масляный бак гидросистемы заявляемой краноманипуляторной установки не загромождает нижнюю часть основания опорно-поворотного устройства и не портит ее внешний вид. Реализация такой конструктивно-компоновочной схемы исключает необходимость формирования специальной площадки для размещения масляного бака гидросистемы установки на раме шасси транспортного средства со всеми вытекающими отсюда последствиями.
Секционный золотниковый гидрораспределитель 24 управления рабочими движениями грузоподъемной стрелы в заявляемой краноманипуляторной установке выполнен в виде навесного модуля, закрепленного при помощи болтового соединения 119 на тыльной части одной из неподвижных балок выносных аутригеров в непосредственной близости от стойки 5 опорно-поворотного устройства. Последнее обстоятельство существенно упрощает возможность прокладки магистралей 25 питания гидросистемы 21 по кратчайшим траекториям.
Прокладка магистралей питания, связывающих между собой элементы гидравлической аппаратуры 23 и силовые исполнительные механизмы 7, 10, 12, 13, 20, 46, выполнена по бесколлекторной схеме и кратчайшим траекториям с закреплением их на металлоконструкции при помощи навесных держателей 120 различного конструктивного исполнения и прижимов 121 и формированием в необходимых местах соответствующих слабин (петель) 122 провисания магистралей, обеспечивающих свободу рабочих движений (манипуляций) грузоподъемной стрелы 8 с подвешенным на ней гидрофицированным рабочим органом, например грейфером 20.
При этом магистрали питания гидросистемы заявляемой установки, связывающие между собой элементы гидравлической аппаратуры и силовые исполнительные механизмы 7, 10, 12, 13 привода секций 9, 14, 15, 83 грузоподъемной стрелы 8 и гидрофицированного рабочего органа 20 в зоне размещения поворотной стойки 5, сведены в расположенный снаружи жгут 123, помещенный в эластичный защитный кожух 124 трубчатой конфигурации из синтетического износостойкого материала с формированием локальных ответвлений 125, подсоединенных напрямую к гидроцилиндру 7 углового перемещения подъемной секции 9 стрелы и закреплением жгута на стойке вблизи указанных ответвлений и на подъемной секции около узла шарнирного сочленения ее со стойкой. В зоне расположения подъемной секции 9 указанные магистрали проложены внутри нее с формированием локальных ответвлений 125, 127, 128 к гидроцилиндрам 10, 12, 13 подъема телескопа 11, привода его выдвижных секций 14, 15 и гидрофицированному рабочему органу 20.
Для этого в металлоконструкции подъемной секции предусмотрены соответствующие заходные и выходные лючки 129, 130.
В зоне расположения телескопа 11 и механического удлинителя 16 магистрали питания 128 гидрофицированного рабочего органа 20 проложены снаружи с локальным за креплением их на металлоконструкции каждой из его секций 14, 15 и 83 и удлинителя. При этом магистрали 128 питания гидросистемы, подстыковываемые к гидрофицированным сменным рабочим органам, например грейферу 20, снабжены быстродействующими концевыми присоединителями 131, выполненными в виде отжимных клапанов с замковыми механизмами, например, шарикового типа.
Реализованные в конструкции гидросистемы заявляемой установки технические решения позволяют при необходимости легко заменить навесные держатели 120 той или иной их разновидностью, например, в зависимости от числа и типа прокладываемых магистралей и других факторов. Они значительно облегчают формирование необходимых радиусов гиба, петель провисания, жгутовку магистралей в зонах закрепления и в целом позволяют упорядочить всю трассу прокладки и характер перемещения их провисающих участков в пространстве во время работы установки с обеспечением необходимой защиты от механических повреждений и улучшить ее внешний вид.
К нижней части переднего конца короба неподвижной секции 83 телескопа 11 стрелы 8 приварена дугообразная скоба 132, предназначенная для фиксации на ней грузозахватного крюка 19 подвески 18 в нерабочем положении. Конструкция скобы предельно проста в изготовлении, удобна в эксплуатации и исключает раскачивание крюка при движении транспортного средства.
К внешним боковым стенкам 133, 134 обеих неподвижных балок 39, 40 выносных аутригеров опорно-поворотного устройства в зоне расположения поворотной стойки 5, а также на противоположном конце одной из них, приварены монтажно-присоединительные кронштейны 135, 136, 137 с развитыми в поперечном направлении сквозными вертикальными каналами 138 для прохода крепежа при монтаже краноманипуляторной установки.
Работает заявляемая краноманипуляторная установка, как правило, с вынесенными аутригерами 3.
Для перевода аутригеров 3 из транспортного положения в рабочее сначала расфиксируют и выдвигают (выносят) подвижные балки 100 из внутренних полостей неподвижных балок 39,40 и фиксируют их в крайнем выдвинутом положении.
В этой позиции посредством извлечения шкворней 101 из отверстий 104, 105 расцепляют детали узлов шарнирной подвески аутригеров 3 и путем поворота вокруг продольной оси шарнира переводят последние из транспортного положения в рабочее опорными лапами 95 книзу и фиксируют их теми же самыми шкворнями.
По окончании этой операции путем извлечения шкворней 96 расцепляют между собой промежуточные трубы 94 и опорные лапы 95 нижней секции аутригеров 3 и, придерживая руками, выдвигают лапы из труб вниз до соприкосновения с грунтом. Если в этом положении установочные отверстия под шкворни 96 в трубах 94 и лапах 95 не совпадают, то последние несколько приподнимают до совмещения указанных отверстий и стопорят вводимыми в них шкворнями, в результате чего промежуточные трубы и опорные лапы аутригеров оказываются жестко скрепленными друг с другом в одно целое.
Затем, используя ручные приводы 99, посредством соответствующего вращения ходовых винтов механизмов 98 верхних секций аутригеров 3 перемещают вниз кинематически связанные с винтами гайки механизмов и жестко скрепленные с ними промежуточные трубы 94 с опорными лапами 95 до встречи последних с грунтом.
Вынесенные таким образом аутригеры обеспечивают силовую разгрузку рессор шасси 64 транспортного средства и повышают его устойчивость при выполнении краноманипуляторной установкой грузоподъемных работ.
Убедившись в правильности и надежности выставки опорных лап 95 аутригеров 3, выводят из зацепления со скобой 132 грузозахватный крюк 19.
Затем извлекают ригель 71 подпружиненного фиксатора 70 грузоподъемной стрелы 8 из отверстия 72 ложемента 66 опорной площадки 65 основания 2 опорно-поворотного устройства 1 и приподнимают стрелу с ложемента. После этого вынимают шкворень 93 из отверстий 85 и 92 пальца 84 и прижима 86 механизма 82 фиксации гидроцилиндров 12, 13 телескопа 11 стрелы 8.
Расфиксированный таким образом прижим 86 приподнимают вверх, выводя его из зацепления с гидроцилиндрами 12, 13 привода выдвижных секций 14, 15 телескопа 11 и поворачивают его вокруг пальца 84 на 90o. При совпадении отверстий 85 и 91 в пальце 84 и прижиме 86 последний фиксируют в этой позиции тем же самым шкворнем 93, вводимым в указанные отверстия.
После выполнения этой операции грузоподъемная стрела 8 краноманипуляторной установки готова к работе.
При помощи заявляемой установки можно поднимать, перемещать поднятый груз в окружном и продольном направлениях и опускать его на необходимое место. При этом подъем и опускание груза могут осуществляться посредством как угловых перемещений подъемной секции 9 и телескопа 11 в вертикальной плоскости, так и путем телескопирования выдвижных секций 14, 15 последнего.
В последнем случае телескоп 11 ориентируют вертикально.
Перенос груза в продольном направлении может осуществляться как первым, так и вторым способами. В последнем случае телескоп 11 следует располагать горизонтально, либо под некоторым углом к горизонту. Перенос груза в окружном направлении осуществляют посредством поворота стойки 5 устройства 1 краноманипуляторной установки со стрелой 8 в горизонтальной плоскости.
В процессе выполнения указанных операций, а также при переводе краноманипуляторной установки в транспортное положение и наоборот (в рабочее) стрела 8 может трансформировать свой геометрический облик посредством соответствующих манипуляций ее секциями 9, 14, 15 и 83 при помощи гидроцилиндров 7, 10, 12, 13 двойного действия.
При этом вылет механического удлинителя 16 изменяют посредством дискретного выдвижения или втягивания его в замыкающую секцию 15 телескопа 11 с фиксацией в необходимом положении шкворнем 139. Указанная операция выполняется вручную перед началом работы краноманипуляторной установки.
Для фиксации механического удлинителя 16 в замыкающей секции 15 телескопа 11 в металлоконструкции их предусмотрены соответствующие присоединительные отверстия 140, 141 под шкворень 139.
Поворот стойки 5 опорно-поворотного устройства 1 со стрелой 8 краноманипуляторной установки осуществляют при помощи механизма 6. Для этого включают гидромотор 46. Вращение выходного вала гидромотора передается на глобоидный червяк 142 редуктора 47, кинематически сочлененный с его колесом 48. Далее от колеса 48 через шлицевое соединение 49 оно сообщается стойке 5. Стойка 5, поворачиваясь в комбинированном подшипниковом узле 4, обеспечивает перемещение стрелы 8 в окружном направлении.
При выполнении рабочих операций, связанных с подъемом, опусканием и окружным перемещением груза, опорно-поворотное устройство 1 установки воспринимает изгибный момент и осевую силу, обусловленную весом стрелового оборудования с рабочим органом и груза, реактивный момент, реализуемый механизмом поворота стойки, а также усилия от действия выносных аутригеров. При этом эксплуатационные нагрузки, обусловленные действием изгибающего момента и осевой силы, со стрелы 8 передаются на поворотную стойку 5. Радиальные составляющие этих нагрузок воспринимаются подшипниками 35 и 36, 37, а осевая - через подшипники 36, 37 торцевой опорой 38.
От подшипников и торцевой опоры указанные нагрузки через плиты 26, 27 основания и жестко скрепленные с ними неподвижные балки 39, 40 выносных аутригеров 3 передаются на хребтовые лонжероны 143, 144 шасси 64 транспортного средства.
После завершения работы сначала переводят в транспортное положение грузоподъемную стрелу 8. Для этого втягивают во внутреннюю полость неподвижной секции 83 телескопа 11 стрелы выдвижные секции 14, 15 и механический удлинитель 16 с фиксацией последнего в крайнем положении шкворнем 139, вводимым в отверстия 140, 141.
Затем посредством извлечения шкворня 93 из отверстий 85 и 91 в пальце 84 и прижиме 86 расфиксируют и поворачивают последний на 90 градусов вокруг пальца с последующим опусканием прижима на наружные поверхности корпусов 79 гидроцилиндров 12, 13 привода выдвижных секций 14, 15 телескопа 11.
При совпадении отверстий 85, 92 пальца 84 и прижима 86 последний фиксируют в этой позиции посредством введения шкворня 93 в указанные отверстия.
После выполнения этой операции стрелу 8 трансформируют путем складывания по треугольнику и устанавливают опорно-установочным элементом 67 на ложемент 66 опорной площадки 65 основания 2 опорно-поворотного устройства 1.
При этом зацеп 68 элемента 67 вводится в спрофилированный по контуру зацепа паз 69 в ложементе 66, обеспечивая однозначное пространственное положение укладываемой стрелы 8 в транспортном положении.
В этой позиции отверстие 62 в элементе 67 оказывается напротив ригеля 71 фиксатора 70. Фиксацию телескопа 11, а следовательно, и всей стрелы 8 в нерабочем положении осуществляют посредством введения ригеля 71 в отверстие 72.
После выполнения этой операции грузозахватный крюк 19 надевают на скобу 132. При этом фиксацию крюка на скобе осуществляют его автономным предохранительным замком. При необходимости подвеска 18 с грузозахватным крюком 19 может быть легко заменена другим рабочим органом, например грейфером 20. Для этого из отверстия концевого присоединителя 17 механического удлинителя 16 извлекают шкворень 145, снимают подвеску 18 с крюком 19 и на ее место устанавливают грейфер 20, фиксируя его тем же шкворнем. После присоединения грейфера к нему при помощи быстродействующих присоединителей 131 подстыковывают соответствующие магистрали 128 питания гидросистемы 21 установки. В рассматриваемом случае при переводе установки в нерабочее положение грейфер отстыковывается от стрелы и укладывается на платформу транспортного средства автономно.
По окончании укладки стрелы 8, действуя в обратном порядке, переводят в транспортное положение оба выносных аутригера 3 опорными лапами вверх.
Наличие в конструкции основания опорно-поворотного устройства заявляемой краноманипуляторной установки монтажно-присоединительных кронштейнов 135, 136, 137 с развитыми в поперечном направлении сквозными вертикальными каналами для прохода крепежа, при монтаже краноманипуляторной установки, обеспечивает возможность размещения (монтажа) ее на транспортных средствах с различными габаритами лонжеронных рам их шасси.
В конструкции заявляемой краноманипуляторной установки использованы широко применяемые в машиностроении отечественные материалы, оптимальные технические решения и типовая технология изготовления.
С учетом этого, а также требований, предъявляемых ГОСГОРТЕХНАДЗОРом к подобного рода технике, она может быть многократно воспроизведена по разработанной на нее документации в условиях серийного производства на специализированных машиностроительных заводах, располагающих необходимым оборудованием.
В настоящее время в ЗАО "НК Уралтерминалмаш" на заявляемую краноманипуляторную установку разработана рабочая документация, по которой разработана опытная партия указанных изделий.
Эффективность заложенных в конструкцию заявляемой краноманипуляторной установки технических решений, а также возможность получения при осуществлении изобретения вышеупомянутого технического результата, заключающегося в упрощении конструкции, повышении ее весового совершенства и улучшении технико-эксплуатационных качеств, подтверждены соответствующими расчетами и результатами специальных испытаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ГРУЗОПОДЪЕМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 1999 |
|
RU2169694C2 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2230699C2 |
| ГРУЗОПОДЪЁМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2240973C2 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |

































Изобретение относится к подъемному машиностроению. Краноманипуляторная установка содержит опорно-поворотное устройство с выносными аутригерами, многосекционную стрелу со сменными рабочими органами и гидросистему с магистралями питания. Основание опорно-поворотного устройства выполнено в виде полого корпуса с двумя разнесенными по высоте и горизонтально ориентированными плитами, жестко связанными между собой при помощи приварного короба с двойной стенкой, образованного центрально расположенной трубой, снабженной приварными концевыми присоединителями под верхний радиальный и блок нижних радиально-упорных подшипников и торцевую опору поворотной стойки, и внешней оболочкой, охватывающей трубу с зазором по ее наружному обводу. Плиты дополнительно замкнуты друг на друга расположенными между ними с диаметрально противоположных сторон трубы неподвижными приварными балками выносных аутригеров, а комбинированный подшипниковый узел с упомянутыми плитами смещен в поперечном направлении к одним из концов указанных балок. Механизм поворота стойки выполнен в виде установленного на верхней плите через подкладное самоцентрирующееся сферическое кольцо и приводимого в действие гидромотором навесного червячного редуктора с глобоидным зацеплением, рабочее колесо которого посредством шлицевого соединения кинематически сочленено с нижней частью стойки, а длины подъемной секции, поворотной стойки и секций телескопа грузоподъемной стрелы в образованном ими шарнирно-рычажном плоском механизме выполнены с возможностью формирования в нерабочем положении замкнутого плоского треугольника путем наклона книзу подъемной секции и горизонтальной укладки втянутого телескопа на опорную площадку основания концевым присоединителем рабочего органа вплотную к нижней части стойки в пределах максимального поперечного габарита шасси транспортного средства, используемого для монтажа установки. Изобретение обеспечивает улучшение технико-эксплуатационных характеристик установки. 17 з.п. ф-лы, 51 ил.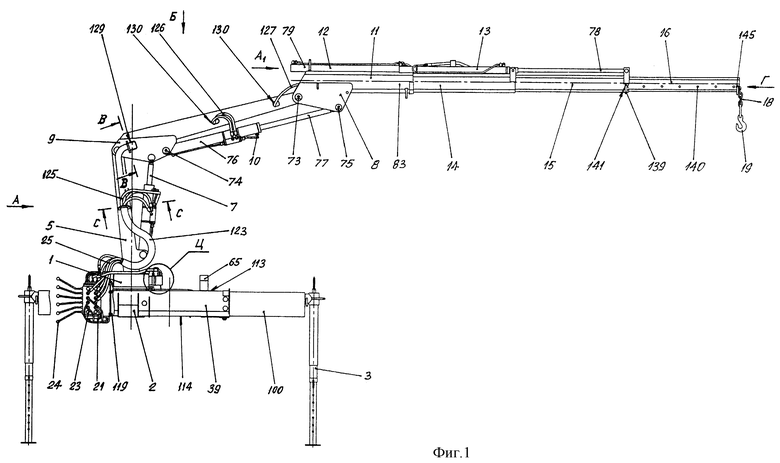
| Пособие для операторов(машинистов) по безопасной эксплуатации кранов-манипуляторов, составитель Н.А.Шишков, М., НПО ОБТ, 1995, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Консольно-поворотный кран | 1981 |
|
SU958301A1 |
| US 4518308 A, 21.05.1985 | |||
| МАНИПУЛЯТОР | 1991 |
|
RU2037464C1 |

